JP2018146576A - 三次元形状計測装置及び三次元形状計測方法 - Google Patents
三次元形状計測装置及び三次元形状計測方法 Download PDFInfo
- Publication number
- JP2018146576A JP2018146576A JP2018034920A JP2018034920A JP2018146576A JP 2018146576 A JP2018146576 A JP 2018146576A JP 2018034920 A JP2018034920 A JP 2018034920A JP 2018034920 A JP2018034920 A JP 2018034920A JP 2018146576 A JP2018146576 A JP 2018146576A
- Authority
- JP
- Japan
- Prior art keywords
- measurement object
- dimensional shape
- imaging device
- measurement
- light source
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title description 29
- 238000003384 imaging method Methods 0.000 claims abstract description 145
- 238000005286 illumination Methods 0.000 claims abstract description 48
- 230000001678 irradiating effect Effects 0.000 claims abstract description 18
- 238000005259 measurement Methods 0.000 claims description 263
- 230000003287 optical effect Effects 0.000 claims description 72
- 238000012545 processing Methods 0.000 claims description 25
- 238000001514 detection method Methods 0.000 claims description 14
- 238000000691 measurement method Methods 0.000 claims description 7
- 230000000007 visual effect Effects 0.000 claims description 7
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 7
- 239000000284 extract Substances 0.000 claims description 3
- 239000012530 fluid Substances 0.000 claims 1
- 238000012986 modification Methods 0.000 description 13
- 230000004048 modification Effects 0.000 description 13
- 230000008569 process Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 230000008439 repair process Effects 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- ZZUFCTLCJUWOSV-UHFFFAOYSA-N furosemide Chemical compound C1=C(Cl)C(S(=O)(=O)N)=CC(C(O)=O)=C1NCC1=CC=CO1 ZZUFCTLCJUWOSV-UHFFFAOYSA-N 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
Images













Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/20—Hydro energy
Abstract
Description
水車羽根の摩耗状況を管理する方法の一つとして、デプスゲージを用いる方法がある。すなわち、デプスゲージを用いて摩耗部の最大深さを計測し、さらに、摩耗部の縦横の長さを計測することで摩耗部の大きさの管理指標としている。摩耗度合をより正確に計測する方法として、例えば摩耗部に樹脂を詰めて摩耗部のレプリカをとり、レプリカの形状から摩耗の状況を評価する方法等も提案されている。
また、例えば、スリット光のスリット長を拡張し、強い光学パワーのレンズを用いることなくスリット光発生手段から被測定物までの光路長を長くすることで測定装置の小型化を図った三次元測定装置(例えば、特許文献1参照。)、さらに、測定装置下部にローラを設け、測定対象物にローラを当接させた状態で測定を行うことで測定装置と測定対象物との間の距離を一定に保ち測定精度を向上させるようにした、タイヤの溝の深さを測定するトレッド深さ測定装置(例えば、特許文献2参照。)等も提案されている。
さらに、上記の装置は撮像装置を搭載しているものの外観画像を表示する機能は搭載していない。
本発明は、上記未解決の問題に着目してなされたものであり、測定部位の外観観察を行い、かつ、対象形状に依存せずに局所的な摩耗形状を高精度に測定することの可能な三次元形状計測装置及び三次元形状計測方法を提供することを目的としている。
本発明の他の態様によれば、測定対象物にスリット光を照射するスリット光源と、撮像装置と、照明光源と、を有するヘッド部と、撮像装置による撮像画像を表示する表示装置と、を備え、照明光源は、スリット光を照射することにより得られる測定対象物上の光切断線を含む測定対象物上の領域を照射し、撮像装置は、光切断線を含む照明光源の照明光による照射領域を視野内に含み、照明光源は、スリット光を照射することにより得られる測定対象物上の光切断線を、表示装置に表示された画面上において認識可能な照明光を照射する三次元形状計測装置、が提供される。
本発明の他の態様によれば、測定対象物にスリット光を照射するスリット光源及び撮像装置を有するヘッド部と、ヘッド部に固定された脚部と、を備え、脚部は、ヘッド部の走査方向に対して直交する方向に間隔を空けて設けられた一対の脚部であり、ヘッド部はその走査時には、一対の脚部のみを介して測定対象物との間の距離を保った状態で測定対象物上を移動する三次元形状計測装置、が提供される。
なお、以下の詳細な説明では、本発明の実施形態の完全な理解を提供するように多くの特定の具体的な構成について記載されている。しかしながら、このような特定の具体的な構成に限定されることなく他の実施形態が実施できることは明らかである。また、以下の実施形態は、特許請求の範囲に係る発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
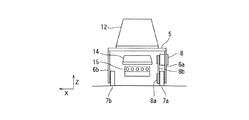
三次元形状計測装置1は、測定対象物の計測を行うヘッド部2と、ヘッド部2で得られたデータを解析する解析処理部3と、を備える。
ヘッド部2は、撮像装置11と、撮像装置11用のミラー12と、レーザスリット光源13と、レーザスリット光源13用のミラー14と、白色LED光源15と、を備える。さらに、ヘッド部2は、架台5と架台5に一端が固定された一対の脚部6a、6bを備える。
また、脚部6a、6bは、XY平面と垂直な方向に固定され、架台5から車輪7a、7bの下端までの長さが等しく設定されている。なお、脚部6a、6bは、架台5から車輪7a、7bの下端までの垂直方向の長さが等しければ、正面から見た場合に、脚部6a、6bの先端側、つまり下端側が外側に多少広がっていてもよい。
ミラー12は、架台5の上面にレンズ11aと向かい合うように固定され、撮像装置11の光軸をXY平面に対して垂直方向に折り曲げるように配置される。
レーザスリット光源13は、XY平面と平行にレーザスリット光が出力されるように配置される。レーザスリット光源13は、電源ケーブル13aにより解析処理部3に接続され、解析処理部3から電力供給を受ける。
レーザスリット光源13とミラー14とは、車輪7を平面に当接させ、ヘッド部2を撮像装置11の光軸が、車輪7が当接された平面と平行となるように維持した場合に、ミラー12で折り曲げられた撮像装置11の光軸と、ミラー14で折り曲げられたレーザスリット光とが、車輪7a、7bと平面との接点間を結ぶ直線と重なるように配置される。
このように、レーザスリット光が、撮像装置11の光軸に対して所定の角度をなして車輪7が当接された平面に投光されるようにすることによって、凹凸のある測定対象物表面に車輪7を当接させたときに光切断線が形成され、測定対象物の表面の凹凸の大きさを視覚化することができ、凹凸の大きさを判読できるようになっている。
また、白色LED光源15は、車輪7を平面上に当接させ、ヘッド部2を、撮像装置11の光軸が、車輪7が当接された平面と平行となるように維持した状態で、撮像装置11により車輪7が当接された平面を撮影したときに得られた撮像画像に、LED照射領域a1と光切断線a2とが含まれる位置に配置される。
このようにミラー14を設けることによって、本来フィルタ等を用いて外乱光が入ることを極力避けるようにする光切断線a2と、明るい照明で測定対象物を観察するためのLED照射領域a1とを、フィルタを用いずに撮像装置11の視野内に共存させることができる。
さらに、一方の脚部6例えば6aには、ロータリエンコーダ8が取り付けられ、脚部6aに設けられた車輪7aと一体に回転するプーリー或いは滑車等の回転部材8aとロータリエンコーダ8とがタイミングベルト8bで連結されている。車輪7の回転角度情報は、タイミングベルト8bを介してロータリエンコーダ8に伝達され、ロータリエンコーダ8は、車輪7の回転数に応じたパルス信号を出力する。ロータリエンコーダ8から出力されるパルス信号は、信号ケーブル8cを介して解析処理部3に入力される。
USBハブ22は、USBケーブル11bを介して撮像装置11と接続され、撮像装置11による撮像情報をタブレットPC21に出力する。また、USBハブ22は、カウンタ部23でのカウント数をタブレットPC21に出力する。
バッテリ部24は、タブレットPC21に電力供給を行うと共に、電源ケーブル13aを介してレーザスリット光源13に電力供給を行う。また、電源ケーブル15aを介して白色LED光源15に電力供給を行う。
タブレットPC21では、例えば、車輪7を平面に当接させ、撮像装置11の光軸が車輪7が当接された平面と平行となるように維持した状態で、ヘッド部2を平面に沿って走査方向に移動させたときの、ヘッド部2の移動量と、カウンタ部23におけるカウント数とから、ロータリエンコーダ8から入力されるパルス信号1パルスあたりの移動量を予め検出しておく。そして、タブレットPC21では、この1パルスあたりの移動量と、計測時のカウント数とを乗算することで、測定対象物上におけるヘッド部2の移動量を演算する。
まず、撮像装置11により撮影された撮像画像毎に、レーザスリット光パターンから光切断線a2を抽出し、光切断線a2が抽出された部位の各点の直交座標系上の位置を算出する。ここで抽出された光切断線a2上の各点の直交座標系上の位置を(x,y,z)とする。この直交座標系は、撮像装置11により撮影された撮像画像に設定される座標系であって、図4に示すように、撮像画像において、撮像装置11の光軸の延びる方向であるY軸と平行な方向、つまり、撮像画像の上下方向をy軸、y軸と直交する方向をx軸、つまり撮像画像の左右方向をx軸、とし、撮像画像においてx軸及びy軸と直交する方向をz軸としている。
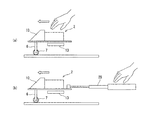
ここで、作業者は、三次元形状を計測する場合には、例えば図3(a)に示すようにヘッド部2を把持し、車輪7を測定対象物の表面に当接させ、撮像装置11の光軸が、測定対象物の表面と平行となるようにヘッド部2を維持した状態で、測定対象物の表面に沿ってヘッド部2をY軸方向に移動させる。
図7に示すように、タブレットPC21は、計測時には、撮像装置11により予め設定したタイミングで測定対象物を撮影させる。
そして、撮像情報に基づき撮像画像をタブレットPC21の表示装置に表示すると共に、ステップS1で読み込んだ撮像情報とカウント数とを対応付けて記憶部に格納する(ステップS2)。
ステップS1及びステップS2の処理を繰り返し行い、所定数のデータ読み込みを行ったならば(ステップS3)計測を終了する。例えば、予め設定したタブレットPC21内の記憶部の記憶容量に応じたデータ数のデータ読み込みが行われたとき、或いは、タブレットPC21において作業者により計測終了を指示する操作が行われたとき等に、計測を終了する。
タブレットPC21は、このようにして計測した撮像情報を用いて解析を行う場合には、図8に示すように、まず記憶部からカウント数と対応付けられた撮像情報を読み出す(ステップS11)。
撮像情報に基づき撮像画像から光切断線a2を抽出し(ステップS12)、光切断線a2を、撮像画像におけるxyz直交座標上の形状データに変換する(ステップS13)。
ステップS13で得た撮像画像上のxyz直交座標系における形状データと、ステップS14で得たヘッド部2の位置とを合成することにより、ヘッド部2がY0からYnにあるときまでの測定対象物の光切断線a2に対応する部位における三次元データを構築する(ステップS15)。
三次元形状に基づく解析では、例えば、測定対象物の三次元形状から得られる摩耗領域と予測される凹凸等について最大深さや摩耗部位の面積等の算出を行う。
作業者は、図3に示すように、ヘッド部2を直接把持するか又はヘッド部2に棒状の治具28を取り付け、この治具28を介してヘッド部2を間接的に把持した状態で、車輪7を測定対象物の表面に当接させ、撮像装置11の光軸が、測定対象物の表面と平行となるようにヘッド部2を維持した状態で、ヘッド部2を測定対象物の表面に沿って移動させる。
ヘッド部2の移動に伴い、撮像装置11による撮影が行われ、測定対象物上におけるヘッド部2の現在位置に対応した撮像画像がタブレットPC21の表示装置に表示される。具体的には、図4に示すように、測定対象物の光切断線a2とLED照射領域a1とが表示される。
また、ヘッド部2の移動に伴い、測定対象物の表面の各時点における撮像情報と、カウンタ部23でのカウント数とが対応付けられてタブレットPC21の記憶部に記憶される。
作業者はこの表示を見ることによって、測定対象物の凹凸の発生状況や凹凸の生じている面積、深さ等を認識することができる。
また、車輪7を測定対象物の表面に当接させた状態でヘッド部2を測定対象物の表面に沿って移動させるという簡易な操作で計測を行うことができ、また、ヘッド部2と解析処理部3という簡易な構成で安価に実現することができるため、使い勝手を向上させることができ、汎用性の高い三次元形状計測装置を実現することができる。
また、ミラー12で直角に折り曲げられた撮像装置11の光軸と、ミラー14で折り曲げられたレーザスリット光とが、車輪7a、7bと車輪7が当接される平面との接点間を結ぶ直線上で重なるようにすることにより、撮像装置11が、車輪7と車輪7が当接される平面との接点間を結ぶ直線を中心としてこの接点間を結ぶ直線を含む領域を撮影するようにしている。そのため、撮像画像において、光切断線a2が上下方向中央に位置して表示され、撮像画像において上下方向中央が光切断線a2の基準となるため、光切断線a2の振幅方向を視覚的に容易に認識することができ、その結果、測定対象物が凹状であるのか凸状であるのかを容易に認識することができる。
また、車輪7が磁石によって常に測定対象物に吸着しているため、常に車輪7の測定対象物との接点を基準とする測定対象表面の形状計測を行うことができる。
また、車輪7が測定対象物に吸着するため、図3(b)に示すようにヘッド部2に治具28を取り付けて測定対象物を走査する場合等でも、車輪7を常に測定対象物の表面に当接させた状態で移動させることができ安定した計測を行うことができる。
また、本実施形態における三次元形状計測装置1を用いることにより、測定対象物の外観を撮像画像上で観察することができるため、例えば水車羽根等において、従来目視確認することができないような奥まった部位についても、摩耗状況を容易に観察することができる。さらに、光切断線から摩耗の発生を認めた部位について、その外観をLED照射領域a1において観察することができるため、摩耗部の目視検出と形状計測とを容易に行うことができる。
つまり、車輪7を平面に当接させ、撮像装置11の光軸が、車輪7が当接された平面と平行となるようにヘッド部2を維持した状態で、車輪7が当接された平面を撮影した撮像画像においては、光切断線a2は常に車輪7間を通る直線と重なる位置に表示される。そこで、この直線に相当する基準線L2と、基準線L2に平行な、所定の凹凸量に相当する複数の罫線L1とを、重畳表示する。
特に、水車羽根の摩耗部位の評価を行う場合、摩耗部位の最大深さで摩耗程度を評価する場合がある。その場合、摩耗部位を含む領域を含むようにヘッド部2を走査させ、撮像画像から、光切断線a2の振幅状況を観察して光切断線a2の振幅が最大となる位置を見つけることで、三次元形状演算を行うことなく、おおよその最大深さを容易に認識することができる。
また、ヘッド部2を測定対象物に沿って走査することで、三次元形状を構築することができるため、ヘッド部2によって走査することができれば水車羽根に限らず、自由形状の測定対象物の三次元計測を行うことができる。
上記実施形態においては、ミラー12で折り曲げられた撮像装置11の光軸と、ミラー14で折り曲げられたレーザスリット光源13の照射光とが、車輪7a、7bと車輪7が当接する平面との接点間を結ぶ直線上で重なるようにした場合について説明したがこれに限るものではない。車輪7を平面に当接させ、カメラ光軸のラスタ方向とレーザスリット光とが平行になるように調整した状態で、車輪7a、7bと平面との接点間を結ぶ直線が、車輪7が当接された平面上でY軸方向に平行に前後していても構わない。つまり、例えば、図10(a)に示すように、ミラー12で折り曲げられた撮像装置11の光軸とミラー14で折り曲げられたレーザスリット光の中心との位置関係はそのままで、脚部6のみをヘッド部2のミラー12側の先端部に設けてもよく、逆に、図10(b)に示すように、脚部6のみをレーザスリット光源13の近傍に設けてもよい。このように、脚部6を移動させたとしてもヘッド部2が測定対象物の表面に対して平行であれば測定精度は同等であるが、光軸線と脚部位置が異なっているためヘッド部2の傾きが大きくなると、高さの測定誤差が大きくなる。そのため、ヘッド部2は測定対象物の表面に対して平行となるように走査させることが好ましい。
同様に、ミラー12で折り曲げられた撮像装置11の光軸が、車輪7a、7bと測定対象物との接点間を結ぶ直線よりもY軸方向に離れた位置、つまり、車輪7a、7bと測定対象物との接点間を結ぶ直線を含む予め設定した領域内で測定対象物と交差するようにしてもよい。この場合、撮像画像における光切断線の表示位置が、撮像画像の上下方向にずれるため、撮像画像における光切断線の表示位置を考慮して、撮像装置11の光軸が撮像対象物と交差する位置、つまり、撮像装置11の撮像中心を設定すればよい。
上記実施形態においては、磁石等からなる車輪7を用いた場合について説明したが、車輪に限らず、ローラ、ボールキャスター等、走査方向に回転することの可能な回転体であれば適用することができる。ヘッド部2を測定対象物に対して一方向に走査させる観点から、車輪やローラ等、回転方向が一方向に制限される回転体を用いれば、走査時の手振れ等を低減することができる。
また、例えば、車輪7を設けずに脚部6を測定対象物の表面に直接当接させるようにしてもよい。車輪7を設けない場合、脚部6の測定対象物との接点が支点となってヘッド部2が傾く。車輪7を設けた場合、車輪7の回転中心が支点となってヘッド部2が傾くため、車輪7を設けない場合の方が、ヘッド部2が傾くことにより生じる光切断線の誤差を低減することができる。
上記実施形態においては、ロータリエンコーダ8により、測定対象物上におけるヘッド部2の現在位置を検出する場合について説明したがこれに限るものではない。例えば、ヘッド部2の移動量を検出する移動量検出部としてリニアエンコーダを用い、測定対象物の表面の一部に固定点を設け、ヘッド部2にリニアエンコーダのセンサ部を設け測定対象物の固定点を基準としてリニアエンコーダのスケール部を設けること、或いは、ヘッド部に距離センサを設け、固定点からの移動距離を距離センサで検出すること等により、固定点からの移動距離を計測するようにしてもよい。車輪7を設けない場合には、このような距離センサによりヘッド部2の位置を検出するようにすればよい。
上記実施形態においては、ヘッド部2に2つの脚部6a、6bのみを固定し、この脚部6a、6bに設けられた車輪7a、7bを測定対象物の表面に当接させることにより、測定対象物とヘッド部2との間の距離を一定に保つ場合について説明しているがこれに限るものではない。例えば、測定対象物の表面が比較的なだらかな曲面或いは平面である場合には、脚部6a、6bとは別に、Y軸方向の位置が脚部6a、6bとは異なる位置に、脚部6a、6bと同じ長さの脚部を新たに設け、これら全ての脚部を測定対象物の表面に当接させる。これによって、ヘッド部2を、撮像装置11の光軸が測定対象物の表面と平行となるように維持するようにしてもよい。この場合、新たに設ける脚部を取り外し可能に構成し、測定対象物の表面が比較的なだらかな曲面或いは平面であるときには、取り外し可能な脚部を取り付けることによって、測定対象物の表面がなだらかな場合用の三次元形状計測装置と、測定対象物の表面が比較的複雑な凹凸形状である場合用の三次元形状計測装置とで、切り替え可能に構成してもよい。
上記実施形態においては、撮像装置11から常時撮像情報が出力される場合について説明したがこれに限るものではない。例えば、カウンタ部23から所定の移動距離毎にトリガ信号を発生させて撮像装置11に出力し、撮像装置11がトリガ信号を受信するタイミングで撮像情報をタブレットPC21に送信する。これによって、ヘッド部2が一定距離移動する毎に画像情報をタブレットPC21に出力する構成としてもよい。
上記実施形態においては、白色LED光源15を設けることによりLED照射領域a1の画像も得るようにしているが、必ずしもLED照射領域a1の画像を取得しなくともよい。例えば、曲面に細工された装飾品等の三次元形状を構築することができればよく、表面の状態は目視することができるような場合には、撮像装置11によりレーザスリット光による光切断線を収集すれば三次元形状を構築することができる。この場合、必ずしも撮像画像を表示装置に表示しなくともよい。この場合、図9と同様に、光切断線a2の変動状況から測定対象物の凹凸量を目視で判断するための罫線を重畳表示するようにすれば、表示画面上において、測定対象物の凹凸の程度を容易に認識することができる。
上記実施形態においては、ヘッド部2を、Y軸方向、つまり、ミラー12側に走査するようにした場合について説明したが、これに限らず、ミラー12とは逆側に走査するようにしてもよい。ヘッド部2をミラー12側及び逆側共に走査する場合には、例えばタブレットPC21において、走査方向を入力するようにし、設定された走査方向を考慮して三次元形状を構築すればよい。
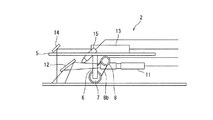
図1に示すように架台5の上側に配置された撮像装置11及びミラー12と、架台5の下側に配置されたレーザスリット光源13とミラー14と白色LED光源15とを備えたヘッド部2において、架台5を挟んで上下を入れ替え、例えば、図11に示すように、架台5の上側に、レーザスリット光源13とミラー14と白色LED光源15とを配置し、架台5の下側に、撮像装置11及びミラー12とを配置してもよい。
また、図11において、撮像装置11とレーザスリット光源13とを入れ替えてもよい。
図11に示すように、架台5の下側に撮像装置11を配置し、架台5の上側にレーザスリット光源13を配置することによって、レーザスリット光源13のスリット光による光切断線を、この光切断線よりも内側から撮像するように、レーザスリット光源13やミラー14、また、撮像装置11やミラー12を配置することができる。つまり、レーザスリット光による光切断線を、ヘッド部2の、走査方向先端により近い位置に配置することができる。
上記実施形態においては、ミラー12及び14によって、撮像装置11の光軸やレーザスリット光を折り曲げることによって、これら撮像装置11の光軸及びレーザスリット光を、車輪7が当接される平面上で重なるようにした場合について説明したがミラー12及び14を設けずに構成することも可能である。
これによって、側面からみて、撮像装置11の光軸とレーザスリット光と脚部6とが、測定対象物の表面で重なり、さらにレーザスリット光の照射位置と重ならない領域が、白色LED光源15により照射されることになり、この場合も、図1と同等の作用効果を得ることができる。
図12の場合、ミラー12及び14を設けなくてすむため、その分、光軸調整を容易に行うことができると共に、部品数の削減を図ることができる。また、ミラー12、14に付着する汚れ等を考慮する必要がなく、使い勝手を向上させることができる。
上記実施形態においては、レーザスリット光により形成される測定対象物の光切断線a2とレーザスリット光が照射されている領域とは異なる領域であるLED照射領域a1とを並べて表示する場合について説明したが、例えば、レーザスリット光の照射領域を含む領域をLED光源により照射し、レーザスリット光により形成される光切断線a2と、レーザスリット光の照射領域の撮像画像とを重畳表示するようにしてもよい。
図14に示すように、レーザスリット光が照射されている領域を含むLED照射領域a11を画面表示することによって、作業者は、測定対象物の表面の状況と、この表面上に形成される光切断線a2とを画面上で認識することができ、実際に測定対象物上に形成される光切断線a2の状況を認識することができるため、直接測定対象物を視認することができない状況であっても、直接視認している場合と同等の画像を画面上で認識することができ、使い勝手を向上させることができる。
なお、ここでは、赤色のレーザ光を照射するレーザスリット光源16と、青色光を発する青色LED光源17とを用いた場合について説明したが、これに限るものではない。レーザスリット光源16の発するレーザスリット光の波長と、LED光源が発するLED照明光の波長とが異なっていればよく、要は、LED照射領域a11の撮像画像から、光切断線a2を抽出することができればどのような組み合わせであってもよく、波長が離れていることが好ましい。例えばレーザスリット光を緑色とし、LED照明光を赤色又は青色としてもよい。
また、レーザスリット光の波長とLED照明光の波長とを異なる波長とする場合に限るものではなく、例えば、レーザスリット光の強度と、LED照明光の強度とを異なる強度にすることで、レーザスリット光により形成される光切断線を、LED照明光の撮像画像から抽出するように構成してもよい。
なお、ここでは、図12に示す三次元形状計測装置において、レーザスリット光により形成される光切断線a2と、レーザスリット光の照射領域の撮像画像とを重畳表示する場合について説明したが、これに限るものではなく、図1に示す三次元形状計測装置において、レーザスリット光により形成される光切断線a2と、レーザスリット光の照射領域の撮像画像とを重畳表示するように構成することも可能である。
図14に示すようにレーザスリット光が照射されている領域を含むLED照射領域a11を画面表示する場合において、さらに、図9と同様に、撮像画像に対し、光切断線a2の変動状況から測定対象物の凹凸量を目視で判断するための罫線を重畳表示するようにしてもよい。
このように、測定対象物の凹凸量を判断するための罫線を重畳表示することによって、正確な凹凸量は検出することはできないものの、測定対象物の実際の表面形状と、この表面形状にレーザスリット光が照射されることで形成される光切断線a2と、罫線とが同時に表示されるため、作業者は測定対象物の計測を行うと同時に凹凸量の概算値を容易に認識することができ、より使い勝手を向上させることができる。
また、簡易的な計測モードのみを実行する機能のみを備えた三次元形状計測装置を構成してもよい。簡易的な計測モードのみを実行する機能のみを備えた三次元形状計測装置の場合、ロータリエンコーダ8やカウンタ部23等を設ける必要がないため、三次元形状計測装置の小型化やコスト削減を図ることができる。
上記実施形態において、タブレットPC21の記憶部に、カウント数と対応付けられて格納された撮像情報をもとに、図15に示すように、測定対象物の凹凸量を簡易的に演算し画面表示できるように構成してもよい。
例えば、作業者がタブレットPC21を操作することによって、例えば再生モードを指示し、図15に示すように、LED照射領域a11を撮影した撮像情報を順に記憶部から読み出し、撮像情報を表示する。また、図9と同様に、目視での凹凸量の計測を可能とする、複数の罫線L1と基準線L2とを重畳表示する。
タブレットPC21では、表示画面においてタッチ入力がされたことを検出すると、タッチ位置を検出し(ステップS21)、タッチ位置近傍に計測マークMを表示する(ステップS22)。そして、作業者が計測マークMをドラッグすること等により計測マークMの位置決めが行われ、計測位置が確定したと判断したならば(ステップS23)、ステップS24に移行する。
そして、求めた距離を、計測マークMの近傍に表示する(ステップS25)。これによって、図15に示すように、計測マークMで指定される、光切断線a2上の点における距離、つまり高さが表示される。
また、光切断線a2の高さを自動的に演算して表示する場合には、目視での凹凸量の計測に用いられる罫線L1を必ずしも表示しなくともよい。
また、上記実施形態において、撮像装置11として、携帯電話やスマートホン等を適用することも可能である。
ここで、上記実施形態において、レーザスリット光源13が特許請求の範囲に記載のスリット光源に対応し、白色LED光源15が照明光源に対応し、ロータリエンコーダ8、カウンタ部23及びステップS14の処理が位置検出部に対応し、車輪7が回転体に対応し、ロータリエンコーダ8が回転数検出部に対応し、タブレット型パーソナルコンピュータ21が解析処理部に対応している。
2 ヘッド部
3 解析処理部
5 架台
6、6a、6b 脚部
7、7a、7b 車輪
8 ロータリエンコーダ
11 撮像装置
12 ミラー
13 レーザスリット光源
14 ミラー
15 白色LED光源
16 レーザスリット光源
17 青色LED光源
21 タブレット型パーソナルコンピュータ(タブレットPC)
Claims (18)
- 測定対象物にスリット光を照射するスリット光源と、撮像装置と、照明光源と、を有するヘッド部を備え、
前記照明光源は、前記スリット光を照射することにより得られる前記測定対象物上の光切断線を除く前記測定対象物上の領域のみを照射し、
前記撮像装置は、前記光切断線と前記照明光源の照明光による照射領域とを同時に視野内に含むことを特徴とする三次元形状計測装置。 - 測定対象物にスリット光を照射するスリット光源と、撮像装置と、照明光源と、を有するヘッド部と、
前記撮像装置による撮像画像を表示する表示装置と、を備え、
前記照明光源は、前記スリット光を照射することにより得られる前記測定対象物上の光切断線を含む前記測定対象物上の領域を照射し、
前記撮像装置は、前記光切断線を含む前記照明光源の照明光による照射領域を視野内に含み、
前記照明光源は、前記スリット光を照射することにより得られる前記測定対象物上の光切断線を、前記表示装置に表示された画面上において認識可能な前記照明光を照射することを特徴とする三次元形状計測装置。 - 前記照明光源は、波長又は強度が前記スリット光と異なる前記照明光を照射することを特徴とする請求項2に記載の三次元形状計測装置。
- 測定対象物にスリット光を照射するスリット光源と、撮像装置と、照明光源と、を有するヘッド部と、
前記撮像装置による撮像画像を表示する表示装置と、を備え、
前記照明光源は、前記スリット光を照射することにより得られる前記測定対象物上の光切断線を含む前記測定対象物上の領域を照射し、
前記撮像装置は、前記光切断線を含む前記照明光源の照明光による照射領域を視野内に含み、
前記照明光源は、間欠的に前記照明光を照射することを特徴とする三次元形状計測装置。 - 前記ヘッド部には、当該ヘッド部の走査方向に対して直交する方向に間隔を空けた一対の脚部が固定されており、
前記ヘッド部は、その走査時には、前記一対の脚部のみを介して前記測定対象物との間の距離を保った状態で当該測定対象物上を移動するようになっていることを特徴とする請求項1から請求項4のいずれか一項に記載の三次元形状計測装置。 - 測定対象物にスリット光を照射するスリット光源及び撮像装置を有するヘッド部と、
当該ヘッド部に固定された脚部と、を備え、
前記脚部は、前記ヘッド部の走査方向に対して直交する方向に間隔を空けて設けられた一対の脚部であり、前記ヘッド部はその走査時には、前記一対の脚部のみを介して前記測定対象物との間の距離を保った状態で当該測定対象物上を移動することを特徴とする三次元形状計測装置。 - 前記スリット光源は、前記ヘッド部の走査方向に対して直交する方向に延びる予め設定した領域内を照射し、
前記撮像装置は、前記スリット光を照射することにより得られる前記測定対象物上の光切断線を視野内に含むことを特徴とする請求項6に記載の三次元形状計測装置。 - 前記脚部は、前記ヘッド部とは逆側の端部に、前記ヘッド部の走査方向と直交する軸回りに回転する回転体を備えることを特徴とする請求項5から請求項7のいずれか一項に記載の三次元形状計測装置。
- 前記回転体は前記測定対象物に対して張り付く性質を有することを特徴とする請求項8に記載の三次元形状計測装置。
- 前記ヘッド部に設けられ前記回転体の回転数を検出する回転数検出部と、
前記測定対象物上における前記ヘッド部の位置情報を検出する位置検出部と、
を備え、
当該位置検出部は、前記回転数検出部の検出値に基づき前記ヘッド部の位置情報を検出することを特徴とする請求項8又は請求項9に記載の三次元形状計測装置。 - 前記測定対象物に設けられた固定点を基準として前記ヘッド部の移動量を検出する移動量検出部と、
前記測定対象物上における前記ヘッド部の位置情報を検出する位置検出部と、
を備え、
当該位置検出部は、前記移動量検出部の検出量に基づき前記ヘッド部の位置情報を検出することを特徴とする請求項1から請求項9のいずれか一項に記載の三次元形状計測装置。 - 前記撮像装置による撮像画像を表示する表示装置を備えることを特徴とする請求項1又は請求項6に記載の三次元形状計測装置。
- 前記表示装置は、前記撮像画像に含まれる光切断線で表される前記測定対象物の凹凸量を表す罫線と、前記光切断線とを重畳表示することを特徴とする請求項2から請求項4及び請求項12のいずれか一項に記載の三次元形状計測装置。
- 前記撮像装置による撮像画像から光切断線を抽出し、当該光切断線と前記位置検出部で検出した位置情報とに基づき前記測定対象物の三次元形状を演算する解析処理部を備えることを特徴とする請求項10又は請求項11に記載の三次元形状計測装置。
- 前記撮像装置による撮像画像を表示するタッチパネルを備えた表示装置を有し、
前記解析処理部は、前記撮像画像に含まれる前記光切断線のうち、前記タッチパネルを操作することにより指示された位置における凹凸量を演算し、演算結果を前記表示装置に表示することを特徴とする請求項14に記載の三次元形状計測装置。 - 前記測定対象物は、水車やタービン等を含む流体機械の羽根であって、前記三次元形状から前記羽根の摩耗形状を計測することを特徴とする請求項14又は請求項15に記載の三次元形状計測装置。
- 請求項5から請求項10のいずれか一項に記載の三次元形状計測装置を用いた三次元形状計測方法であって、
作業者が前記ヘッド部を直接把持するか又は治具を介して間接的に把持した状態で、前記脚部の先端を測定対象物の表面に当接させ、その当接を維持したまま前記測定対象物の表面に沿って前記ヘッド部を走査方向に移動させつつ、前記撮像装置により前記測定対象物を撮影し、
前記ヘッド部が走査されることによって得られた前記撮像装置による撮像画像に含まれる、前記スリット光を照射することにより得られた前記測定対象物上の光切断線に基づき前記測定対象物の三次元形状を演算することを特徴とする三次元形状計測方法。 - 請求項5に記載の三次元形状計測装置を用いた三次元形状計測方法であって、
作業者が前記ヘッド部を直接把持するか又は治具を介して間接的に把持した状態で、前記脚部の先端を測定対象物の表面に当接させ、その当接を維持したまま前記測定対象物の表面に沿って前記ヘッド部を走査方向に移動させつつ、前記撮像装置により前記測定対象物を撮影することを特徴とする三次元形状計測方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017041041 | 2017-03-03 | ||
| JP2017041041 | 2017-03-03 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018146576A true JP2018146576A (ja) | 2018-09-20 |
| JP7081941B2 JP7081941B2 (ja) | 2022-06-07 |
Family
ID=63591914
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018034920A Active JP7081941B2 (ja) | 2017-03-03 | 2018-02-28 | 三次元形状計測装置及び三次元形状計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7081941B2 (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1019525A (ja) * | 1996-07-03 | 1998-01-23 | Tokai Rika Co Ltd | 形状測定装置 |
| JP2000337823A (ja) * | 1999-05-27 | 2000-12-08 | Mitsubishi Heavy Ind Ltd | 表面検査装置及び表面検査方法 |
| JP2003315020A (ja) * | 2002-04-19 | 2003-11-06 | Nissan Motor Co Ltd | 隙間および段差の測定装置および測定方法ならびに測定プログラム |
| JP2006242674A (ja) * | 2005-03-02 | 2006-09-14 | Moritex Corp | 光切断測定装置及び輝線像撮像装置 |
| JP2008175625A (ja) * | 2007-01-17 | 2008-07-31 | Konica Minolta Sensing Inc | 三次元測定装置及び携帯型計測器 |
| JP2009511163A (ja) * | 2005-10-14 | 2009-03-19 | アプライド リサーチ アソシエイツ エヌゼット リミテッド | 表面特徴を観察する方法とその装置 |
| JP2016168094A (ja) * | 2015-03-11 | 2016-09-23 | シチズンホールディングス株式会社 | 光脱毛装置 |
| JP2017142188A (ja) * | 2016-02-12 | 2017-08-17 | Ckd株式会社 | 三次元計測装置 |
-
2018
- 2018-02-28 JP JP2018034920A patent/JP7081941B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1019525A (ja) * | 1996-07-03 | 1998-01-23 | Tokai Rika Co Ltd | 形状測定装置 |
| JP2000337823A (ja) * | 1999-05-27 | 2000-12-08 | Mitsubishi Heavy Ind Ltd | 表面検査装置及び表面検査方法 |
| JP2003315020A (ja) * | 2002-04-19 | 2003-11-06 | Nissan Motor Co Ltd | 隙間および段差の測定装置および測定方法ならびに測定プログラム |
| JP2006242674A (ja) * | 2005-03-02 | 2006-09-14 | Moritex Corp | 光切断測定装置及び輝線像撮像装置 |
| JP2009511163A (ja) * | 2005-10-14 | 2009-03-19 | アプライド リサーチ アソシエイツ エヌゼット リミテッド | 表面特徴を観察する方法とその装置 |
| JP2008175625A (ja) * | 2007-01-17 | 2008-07-31 | Konica Minolta Sensing Inc | 三次元測定装置及び携帯型計測器 |
| JP2016168094A (ja) * | 2015-03-11 | 2016-09-23 | シチズンホールディングス株式会社 | 光脱毛装置 |
| JP2017142188A (ja) * | 2016-02-12 | 2017-08-17 | Ckd株式会社 | 三次元計測装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7081941B2 (ja) | 2022-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6291562B2 (ja) | 有向性のプローブ処理による、三次元スキャナにおける多経路干渉の診断および排除 | |
| JP6355710B2 (ja) | 非接触型光学三次元測定装置 | |
| US10119805B2 (en) | Three-dimensional coordinate scanner and method of operation | |
| US20150015701A1 (en) | Triangulation scanner having motorized elements | |
| JP6009753B2 (ja) | 画像測定装置 | |
| KR20130140203A (ko) | 측정 물체 표면 위에서 3d 좌표들을 결정하기 위한 광학 측정 방법 및 측정 시스템 | |
| JP2014515107A5 (ja) | ||
| US20210190483A1 (en) | Optical sensor with overview camera | |
| WO2011011193A1 (en) | Integrated display in a hand-held three-dimensional metrology system | |
| JP2019074470A (ja) | 画像測定装置の調整方法 | |
| JP6934811B2 (ja) | 三次元測定装置 | |
| JP3991040B2 (ja) | 三次元計測装置及び三次元計測方法 | |
| JP6736424B2 (ja) | 三次元測定装置 | |
| JP7081941B2 (ja) | 三次元形状計測装置及び三次元形状計測方法 | |
| JP2011112578A (ja) | 形状測定装置 | |
| JP2011112579A (ja) | 形状測定装置 | |
| US11215449B2 (en) | Three-dimensional shape measuring apparatus | |
| WO2016113861A1 (ja) | 三次元形状測定装置、三次元形状測定方法、構造物製造システム、構造物製造方法、及び測定プログラム | |
| JP2014038015A (ja) | 三次元計測装置 | |
| JP2010169634A (ja) | 作業装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180307 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201106 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211019 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220517 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220526 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7081941 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |