JP2017527333A - 血管または病変のコンプライアンスおよび/または弾性変化を検知、測定および特性化するためのシステム - Google Patents
血管または病変のコンプライアンスおよび/または弾性変化を検知、測定および特性化するためのシステム Download PDFInfo
- Publication number
- JP2017527333A JP2017527333A JP2017502856A JP2017502856A JP2017527333A JP 2017527333 A JP2017527333 A JP 2017527333A JP 2017502856 A JP2017502856 A JP 2017502856A JP 2017502856 A JP2017502856 A JP 2017502856A JP 2017527333 A JP2017527333 A JP 2017527333A
- Authority
- JP
- Japan
- Prior art keywords
- compliance
- data
- elastance
- interest
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000003902 lesion Effects 0.000 title claims abstract description 64
- 210000004204 blood vessel Anatomy 0.000 title claims abstract description 57
- 238000000034 method Methods 0.000 claims abstract description 121
- 230000002792 vascular Effects 0.000 claims abstract description 40
- 238000001356 surgical procedure Methods 0.000 claims abstract description 30
- 238000002399 angioplasty Methods 0.000 claims abstract description 10
- 230000015572 biosynthetic process Effects 0.000 claims abstract description 7
- 230000005291 magnetic effect Effects 0.000 claims description 61
- 238000007631 vascular surgery Methods 0.000 claims description 48
- 238000012360 testing method Methods 0.000 claims description 40
- 238000001514 detection method Methods 0.000 claims description 12
- 238000005259 measurement Methods 0.000 claims description 12
- 238000003384 imaging method Methods 0.000 claims description 10
- 238000005498 polishing Methods 0.000 claims description 9
- 238000002608 intravascular ultrasound Methods 0.000 claims description 8
- 238000012544 monitoring process Methods 0.000 claims description 8
- 238000002679 ablation Methods 0.000 claims description 6
- 238000012014 optical coherence tomography Methods 0.000 claims description 6
- 230000017531 blood circulation Effects 0.000 claims description 5
- 238000006243 chemical reaction Methods 0.000 claims description 4
- 230000008859 change Effects 0.000 description 28
- 230000008569 process Effects 0.000 description 15
- 210000001367 artery Anatomy 0.000 description 13
- 230000001186 cumulative effect Effects 0.000 description 12
- 238000004364 calculation method Methods 0.000 description 10
- 239000000463 material Substances 0.000 description 8
- 230000000694 effects Effects 0.000 description 7
- 230000001965 increasing effect Effects 0.000 description 6
- 230000010354 integration Effects 0.000 description 6
- 239000013598 vector Substances 0.000 description 6
- 230000036772 blood pressure Effects 0.000 description 5
- 238000004891 communication Methods 0.000 description 5
- 238000002474 experimental method Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 208000004434 Calcinosis Diseases 0.000 description 4
- 241001465754 Metazoa Species 0.000 description 4
- 230000002308 calcification Effects 0.000 description 4
- 230000000747 cardiac effect Effects 0.000 description 4
- 238000002203 pretreatment Methods 0.000 description 4
- 239000000126 substance Substances 0.000 description 4
- 230000009466 transformation Effects 0.000 description 4
- 208000037260 Atherosclerotic Plaque Diseases 0.000 description 3
- 208000031481 Pathologic Constriction Diseases 0.000 description 3
- 230000006399 behavior Effects 0.000 description 3
- 239000012530 fluid Substances 0.000 description 3
- 230000006698 induction Effects 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 238000009987 spinning Methods 0.000 description 3
- 230000036262 stenosis Effects 0.000 description 3
- 208000037804 stenosis Diseases 0.000 description 3
- 238000012800 visualization Methods 0.000 description 3
- 238000004458 analytical method Methods 0.000 description 2
- HVYWMOMLDIMFJA-DPAQBDIFSA-N cholesterol Chemical compound C1C=C2C[C@@H](O)CC[C@]2(C)[C@@H]2[C@@H]1[C@@H]1CC[C@H]([C@H](C)CCCC(C)C)[C@@]1(C)CC2 HVYWMOMLDIMFJA-DPAQBDIFSA-N 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 210000001105 femoral artery Anatomy 0.000 description 2
- 239000003302 ferromagnetic material Substances 0.000 description 2
- 230000000004 hemodynamic effect Effects 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000003672 processing method Methods 0.000 description 2
- 230000035485 pulse pressure Effects 0.000 description 2
- 238000011002 quantification Methods 0.000 description 2
- 230000000452 restraining effect Effects 0.000 description 2
- 230000002966 stenotic effect Effects 0.000 description 2
- 230000008961 swelling Effects 0.000 description 2
- 210000001519 tissue Anatomy 0.000 description 2
- 210000003462 vein Anatomy 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 206010002383 Angina Pectoris Diseases 0.000 description 1
- 206010060965 Arterial stenosis Diseases 0.000 description 1
- 206010003210 Arteriosclerosis Diseases 0.000 description 1
- 201000001320 Atherosclerosis Diseases 0.000 description 1
- OYPRJOBELJOOCE-UHFFFAOYSA-N Calcium Chemical compound [Ca] OYPRJOBELJOOCE-UHFFFAOYSA-N 0.000 description 1
- 102000008186 Collagen Human genes 0.000 description 1
- 108010035532 Collagen Proteins 0.000 description 1
- RTZKZFJDLAIYFH-UHFFFAOYSA-N Diethyl ether Chemical compound CCOCC RTZKZFJDLAIYFH-UHFFFAOYSA-N 0.000 description 1
- 102000016942 Elastin Human genes 0.000 description 1
- 108010014258 Elastin Proteins 0.000 description 1
- 206010020772 Hypertension Diseases 0.000 description 1
- 241000124008 Mammalia Species 0.000 description 1
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 1
- 208000006011 Stroke Diseases 0.000 description 1
- 241000282887 Suidae Species 0.000 description 1
- 208000005475 Vascular calcification Diseases 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 210000000709 aorta Anatomy 0.000 description 1
- 210000001765 aortic valve Anatomy 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000004872 arterial blood pressure Effects 0.000 description 1
- 230000000923 atherogenic effect Effects 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000009530 blood pressure measurement Methods 0.000 description 1
- 229910052791 calcium Inorganic materials 0.000 description 1
- 239000011575 calcium Substances 0.000 description 1
- 238000012512 characterization method Methods 0.000 description 1
- 235000012000 cholesterol Nutrition 0.000 description 1
- 230000004087 circulation Effects 0.000 description 1
- 229920001436 collagen Polymers 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 239000002872 contrast media Substances 0.000 description 1
- 210000004351 coronary vessel Anatomy 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000035487 diastolic blood pressure Effects 0.000 description 1
- 230000010339 dilation Effects 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 229920002549 elastin Polymers 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000001802 infusion Methods 0.000 description 1
- 210000003734 kidney Anatomy 0.000 description 1
- 238000011545 laboratory measurement Methods 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 210000002464 muscle smooth vascular Anatomy 0.000 description 1
- 208000010125 myocardial infarction Diseases 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 230000010412 perfusion Effects 0.000 description 1
- 230000037081 physical activity Effects 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 230000000541 pulsatile effect Effects 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 238000004513 sizing Methods 0.000 description 1
- 239000011780 sodium chloride Substances 0.000 description 1
- 238000007920 subcutaneous administration Methods 0.000 description 1
- 230000009885 systemic effect Effects 0.000 description 1
- 230000035488 systolic blood pressure Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 230000002861 ventricular Effects 0.000 description 1
Images

























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/02007—Evaluating blood vessel condition, e.g. elasticity, compliance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0062—Arrangements for scanning
- A61B5/0066—Optical coherence imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/021—Measuring pressure in heart or blood vessels
- A61B5/0215—Measuring pressure in heart or blood vessels by means inserted into the body
- A61B5/02152—Measuring pressure in heart or blood vessels by means inserted into the body specially adapted for venous pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1076—Measuring physical dimensions, e.g. size of the entire body or parts thereof for measuring dimensions inside body cavities, e.g. using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
- A61B5/6853—Catheters with a balloon
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/40—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to mechanical, radiation or invasive therapies, e.g. surgery, laser therapy, dialysis or acupuncture
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/20—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for computer-aided diagnosis, e.g. based on medical expert systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/065—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring contact or contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H70/00—ICT specially adapted for the handling or processing of medical references
- G16H70/20—ICT specially adapted for the handling or processing of medical references relating to practices or guidelines
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Public Health (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Molecular Biology (AREA)
- Heart & Thoracic Surgery (AREA)
- Cardiology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Vascular Medicine (AREA)
- Physiology (AREA)
- Primary Health Care (AREA)
- Epidemiology (AREA)
- Radiology & Medical Imaging (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Urology & Nephrology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Measuring And Recording Apparatus For Diagnosis (AREA)
- Surgical Instruments (AREA)
Abstract
Description
本出願は、2014年6月26に提出された「Devices,Systems and Methods for Locally Measuring Biological Conduit and/or Lesion Compliance,Opposition Force and Inner Diameter of a Biological Conduit」と題する米国特許出願第14/315,774号の一部継続出願であり、さらに、2014年7月18日に提出された「Magnetic Carrier Wave Sensor and RF Emitter and Sensor in Atherectomy Procedures」と題する米国特許出願第62/026,288号、および、2014年8月22日に提出された「Devices,Systems and Methods for Performing Vascular Procedure(s) with Integrated Fractional Flow Reserve」と題する米国特許出願第62/040,598号、および、2014年10月9に提出された「Devices,Systems and Methods for Performing Vascular Procedures with Integrated Intravascular Ultrasound Lesion and Vessel Compliance Measurement」と題する米国特許出願第62/061,883号、および、2015年2月23日に提出された「Magnetic Carrier−Chord Method」と題する米国特許出願第62/119,635号に対する優先権を主張する。それらの各々の内容全体が、参照により本明細書に組み込まれる。
本発明は、概して、血管内の病変を視覚化すること、病変の構成を特性化すること、血管直径を測定すること、ならびに/または、血管手術中に、血管および/もしくは病変のコンプライアンスおよび/もしくはエラスタンス変化を検知、測定および特性化することに関する。
動脈および同様の身体通路、たとえば、生体管路内の組織の除去または修復に使用するための様々な技法および機器が開発されている。そのような技法および機器によくある目的は、患者の動脈内の動脈硬化性プラークの除去である。アテローム性動脈硬化症は、患者の血管の内膜層内(血管内皮下)に脂肪性沈着物(アテローム)が蓄積することを特徴とする。経時的に非常に頻繁に、最初は相対的に軟質の、コレステロールを多く含むアテローム様物質として堆積されるものが、硬化して石灰化動脈硬化性プラークとなる。そのようなアテロームは、血流を制限し、それゆえ、狭窄病変または狭窄と称されることが多く、閉塞させる物質は、狭窄物質と称される。処置しないまま放置されると、そのような狭窄は、狭心症、高血圧、心筋梗塞、脳卒中などを引き起こす可能性がある。
本発明のシステムは、様々な実施形態において、身体管路内のコンプライアンスを検知、測定および評定するための方法、デバイスおよびシステムに関する。他の実施形態において、当該方法、デバイスおよびシステムは、身体管路および/または身体管路内の病変内のコンプライアンスを検知、測定、判定、表示および/または解釈する。すべての実施形態において、検知、測定、判定、表示および/または解釈は、身体管路内で実施される手術の前、間および/または後に行われ得る。例示的な管路は血管を含み、例示的な手術は、アテローム切除術、血管形成、ステント留置および/または生体血管スキャフォールド形成のような血管手術を含む。
本発明は様々な修正および代替形態に従うが、その詳細は、例として図面に示されており、本明細書において詳細に説明されている。しかしながら、その意図するところは、本発明を、記載されている特定の実施形態に限定することではないことは理解されたい。逆に、その意図するところは、本発明の趣旨および範囲内に入るすべての修正、均等物および代替形態を包含することである。
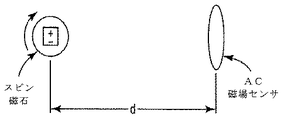
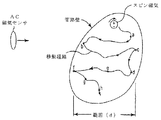
1つまたは複数の磁石が、図9に示すように、回転軌道式アテローム切除デバイスの研磨ヘッドまたはクラウンの中、上または付近にある。代替的に、クラウンが、磁性材料から構成される。以下にさらに説明するように、クラウンがスピンまたは回転すると、AC磁場が放出される。このAC磁場がキャリア信号である。実質的に、スピン磁石の軸、たとえば、回転研磨ヘッドまたはクラウンの長手方向軸に対して垂直な面内にあり、実質的に、クラウンスピンの軸に対して直角に配置されているAC磁場センサが、放出されるキャリア信号に対する感度が最も高い。

この関係の概念的拡張が、短い時間間隔にわたって制約された空間内を自由に周回または移動しているスピン磁石に適用される。
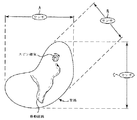
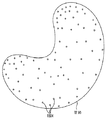
センサを使用して、動脈口のような制約空間の寸法を、センサからスピン磁石への方向のみにおいて推定することができる。異なる視点から動脈口サイズの複数の推定値を得るために、2つ以上のセンサを制約空間周りに位置付けることができる。図14は、3つのAC磁気センサ「A」、「B」および「C」が、複数の独立した寸法推定値を得るために使用されている実施例を示し、腎臓形状の制約空間または管路を示している。複数のセンサからの情報が独立して考慮される事例において、制約空間の形状が、楕円型の形状とは対称的に腎臓形状であったと判定することは非常に困難である。代替的に、この状況によく適している、通信システムおよび信号処理において一般的である復調法がある。
2つ以上のセンサを使用するとき、空間または管路内でのスピン磁石の動きを制約する空間または管路の形状を推定するために、センサデータを使用することが可能である。
軌道式アテローム切除術の間、医師は、手術が進行するときに処置されている動脈壁の構成に関する良好な情報を有しない。医師が、手術中に動脈壁の構成または石灰化としてのリアルタイムのフィードバックを有することが望ましい。
所与のセンサ(y)に対するΔyの定量的推定値を得るために、スピン磁石からそのセンサまでの距離の大まかな推定値を得ることが必要である。高い信号品質を維持するために、AC磁気センサが、可能な限りスピン磁石に近いことが望ましい。これは、皮膚表面上にあるか、または、合理的に可能である限り近いかのいずれかである。これは、磁石からセンサまでの距離が、患者毎に変化し得ることを意味する。これは、磁石からセンサまでの距離が、所与の患者上でセンサ毎に変化し得ることを意味する。複数のセンサが上述したように使用される場合、アレイ内の隣接するセンサは、y方向においてわずかにずらされ得る。そのような隣接する同一のセンサ間のわずかなずれが、アレイ内の隣接するセンサの対からスピン磁石までの距離dの推定値を得るために使用され得る。図20は、隣接するセンサ間に既知のずれがある身体の外部のセンサアレイを示す。
上述したように搬送波を使用する概念を、他の実施態様に拡張することができる。第1に、放出される信号は、身体の外部の1つまたは複数のソースからのものであってもよく、信号は、クラウン上またはその付近に配置されているセンサによって受信されてもよい。第2に、放出される信号として磁場を使用する代わりに、信号は、クラウンから発するか、または、上述したような1つまたは複数の放射体から発するRF場であってもよい。
Xはセンサからスピンクラウンまでの距離であり、
Δxは、クラウンのセンサに対する移動である、xのわずかな変化または変動であり、
Bは、検知される磁気搬送波のピーク間信号強度であり、
ΔBはBのわずかな変化または変動である。
クラウン振動が問題である理由
式#1は、これが様々な様式で適用および解釈することができるシステム物理パラメータ間の関係の単純な表現であるという点で、F=m*Aと同様である。
クラウン振動は、磁場センサの変化速度に対するノイズを導入するが、磁場センサに対するノイズは導入しない。
誘導コイルセンサからの信号の積分は、以下のように、ソフトウェア内で逐一達成することができる。
入来する信号がさらに小さなオフセットを有する場合、この累積合計計算は、すぐに大きな正または負の数になり得る。それゆえ、カットオフ周波数がクラウンのスピンおよび周回周波数を良好に下回るハイパスフィルタを、累積合計計算の前および/または後に適用することが望ましい場合がある。
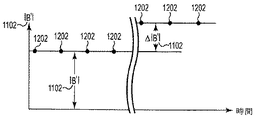
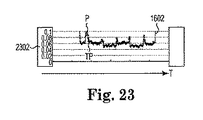
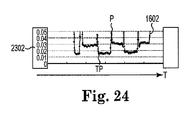
図23および図24内のグラフには、磁石(複数可)を埋め込まれているスピンクラウンが、数秒毎に大きい管(ID=4.02mm)および小さい管(ID=2.78mm)の間で前後に動かされるベンチトップテスト(20150105R007)からの搬送波1602の結果が示されている。
図24に示すスケーリングされていない結果は、内腔径を推定する元の方法による積分信号の累積合計を使用する。累積合計は、クラウンがスピンする間のクラウン振動に起因するノイズを除去する。図24を参照すると、クラウンが、クラウンの軌道を制約する管路の直径の大きい区画と直径の小さい区画との間で前後に動くときが、はるかにより明白である。
スピン磁石クラウンが搬送波を放出する(1周期/スピン)、
搬送波強度は、クラウン軌道がセンサに近づくかまたは遠ざかるにつれて変調する、また
多くの軌道にわたる搬送波変調が内腔径を推定するために使用される。
スピン毎に、最近のスピン位置に対するコード突出が計算される。(添付のパワーポイントを参照されたい)。コード突出は、先行する20ms内のような最近のスピン位置に基づくため、全体的運動が相当の影響を及ぼすには不十分な時間しかない。
スピン毎に、最近のスピン位置に対するコード突出が各センサについて計算される。
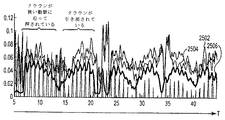
図25のグラフデータは、2.25mm MCクラウンを用いて生きた豚の大腿動脈において採取された動物実験データからのものである。
添付のグラフのx軸は、秒単位の時間である。
相対的にノイズの多いトレース2502は、図23において使用されている元の計算方法である。
以下のデータは、ベンチトップ試験からのものである。
図24のグラフ内のスケーリングされていない結果は、元の計算方法による累積合計信号を使用する。累積合計は、クラウンがスピンする間のクラウン振動に起因するノイズを除去する。これは、クラウンが2つの直径の間で前後に動くときにはるかにより明白である。
図26のグラフ内のスケーリングされていない結果は、コードベースの計算方法による累積合計信号を使用する。コードベースの方法は、心臓運動/ねじれのような全体的運動からクラウン軌道(動脈内腔サイズ)を分離する。
MCセンサの対向構成は、心臓の全体的運動によって導入されるアーティファクトを軽減するように意図されている。
図27に示すように、センサからスピンクラウンの間の距離x1およびx2は、心臓運動によってわずかに変化し、それによって、内腔推定値に小さな振動オフセットが生成される。
図28に示すグラフ結果の説明:
データは、生きた豚に対して実行された動物実験からのものである。
最上部のサブプロットは、未処理信号強度2802である。
第3のサブプロットおよび第4のサブプロットのトレースは、それぞれ2コードおよび3コードを使用している各個々のセンサ2806、2808からのコードベースの推定値である。
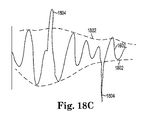
結論:対向構成内腔推定値2804の第2のサブプロットトレースが、顕著により良好に挙動しており、個々のセンサに基づいて、第3のサブプロットトレース2806および第4のサブプロットトレース2808と比較して予測される結果をもたらしている。血圧トレースの、内腔サイズ推定値との視覚的位置整合を補助するために、破線の垂直線が図面に付加されていることに留意されたい。
1.管路または例示的な血管の内腔径。
3.例示的な血管の壁に衝突する回転式アテローム切除システム内の例示的な研磨要素の低周波特徴音。
5.回転式アテローム切除システム内の例示的な研磨要素、たとえば、クラウンまたは刻み目の振動および角偏向。回転研磨要素の振動挙動は、例示的な血管および/またはその中の病変の構成を評定および評価することを補助する。
1.少なくとも1つの磁気センサを含む初期磁気搬送波方法、
2.初期磁気搬送波方法による信号の積分、
3.上記2.項の積分ステップを有しない、1つのセンサを含むコード方法、
4.1つの磁気センサを含み、初期磁気搬送波方法による信号の積分を有する、コード方法、
5.対向していない2つの磁気センサを含み、したがって、全体的運動の影響を軽減し始める、コード方法、
6.互いに対向している2つ以上の磁気センサを含むコード方法、
7.3つ以上の磁気センサを含み、これらのセンサのいずれも対向していない、コード方法、および
8.3つ以上の磁気センサを含み、これら3つ以上のセンサのうちの少なくとも2つが対向している、コード方法。
Claims (29)
- 身体管路内の関心領域に対して使用するのに最良の種類の血管手術を評定するための方法であって、
前記身体管路内に検出デバイスを挿入することと、
前記検出デバイスを用いて、前記身体管路内の前記関心領域について少なくとも1セットのテストコンプライアンスおよび/またはエラスタンスデータを得ることと、
少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータを得ることと、
前記少なくとも1セットの得られているテストコンプライアンスデータを、前記少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータと比較することと、
前記関心領域の前記コンプライアンスおよび/またはエラスタンスを判定することと、
少なくとも前記関心領域の前記判定されているコンプライアンスおよび/またはエラスタンスに基づいて、前記関心領域に最良に適している前記血管手術を選択することと
を含む、方法。 - 前記身体管路は血管であり、前記血管手術は、アテローム切除術、アブレーション、血管形成、ステント留置、および生体血管スキャフォールド形成から成る群の少なくとも1つと、
前記関心領域を含む病変の種類を判定することと、
少なくとも前記判定されているコンプライアンスおよび/またはエラスタンスならびに前記病変の種類に基づいて、前記関心領域に最良に適している前記血管手術を選択することを含む、請求項1に記載の方法。 - 少なくとも前記関心領域の前記判定されているコンプライアンスおよび/またはエラスタンスに基づいて、前記選択されている血管手術にとって最良の器具を選択することをさらに含む、請求項1に記載の方法。
- 少なくとも前記判定されているコンプライアンスおよび/またはエラスタンスならびに前記病変の種類に基づいて、前記選択されている血管手順にとって最良の器具を選択することをさらに含む、請求項2に記載の方法。
- 前記少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータは、所定の通常値のライブラリおよび/または対象患者の同じもしくは同様の生体管路から得られる実際のデータを含む、請求項1に記載の方法。
- 手術が身体管路内で実施される前および後に、前記身体管路内の関心領域のコンプライアンスおよび/またはエラスタンスを評価するための方法であって、
前記身体管路内に検出デバイスを挿入することと、
前記検出デバイスを用いて、前記身体管路内の前記関心領域について第1のセットのテストコンプライアンスおよび/またはエラスタンスデータを得ることと、
少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータを得ることと、
前記関心領域に対して手術を実施する前に、前記関心領域のコンプライアンスおよび/またはエラスタンスを判定するために、前記第1のセットのテストコンプライアンスおよび/またはエラスタンスデータを、前記少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータと比較することと、
前記手術を実施するための手術器具を前記身体管路内へと挿入することと、
前記器具を用いて前記関心領域に対して前記手術の少なくとも一部分を実施することと、
前記検出デバイスを用いて、前記関心領域について第2のセットのテストコンプライアンスおよび/またはエラスタンスデータを得ることと、
前記手術の前記少なくとも一部分を実施した後に、前記関心領域のコンプライアンスおよび/またはエラスタンスを判定するために、前記第2のセットのテストコンプライアンスおよび/またはエラスタンスデータを、前記少なくとも1セットの基準コンプライアンスデータと比較することと
を含む、方法。 - 前記身体管路は血管を含み、前記血管手術は、アテローム切除術、アブレーション、血管形成、ステント留置、および生体血管スキャフォールド形成から成る群のうちの少なくとも1つを含む、請求項6に記載の方法。
- 前記検出デバイスは、圧力検知ガイドワイヤ、イメージングカテーテルまたはガイドワイヤ、少なくとも1つの可膨張式バルーン、少なくとも1つの研磨要素をその上に備えるとともに前記少なくとも1つの研磨要素内または上に配置されている少なくとも1つの磁石を備える回転駆動シャフト、ならびに、少なくとも1つの研磨要素をその上に備えるとともに前記少なくとも1つの研磨要素内または上に配置されている少なくとも1つの磁気センサを備える回転駆動シャフトから成る群のうちの少なくとも1つを含む、請求項6に記載の方法。
- 前記少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータは、所定の通常値のライブラリおよび/または対象患者の同じもしくは同様の生体管路から得られる実際のデータを含む、請求項6に記載の方法。
- 前記テストコンプライアンスおよび/またはエラスタンスデータは、イメージングデータおよび/または機能データを含む、請求項6に記載の方法。
- 前記イメージングデータは、血管内超音波法(IVUS)または光コヒーレンストモグラフィ(OCT)を使用して得られる、請求項10に記載の方法。
- 前記機能データは、血流予備量比(FFR)、バルーン抵抗力、ならびに磁場生成およびモニタリングから成る群のうちの少なくとも1つを使用して得られる、請求項10に記載の方法。
- 前記機能データは、流速、圧力および流れ抵抗のうちの1つまたは複数のモニタリングされるパラメータをさらに含む、請求項10に記載の方法。
- 前記モニタリングされるパラメータ(複数可)の各々は、前記血管手術が進行するにつれて変化する波形を含む、請求項10に記載の方法。
- 前記機能データは、少なくともバルーン抵抗力を使用して得られ、血管径、血管コンプライアンス、および病変コンプライアンスのモニタリングされるパラメータをさらに含む、請求項10に記載の方法。
- 前記機能データは、少なくとも磁場生成およびモニタリングを使用して得られ、反動速度、血管寸法、病変寸法、血管形状、および病変形状のモニタリングされるパラメータから成る群のうちの少なくとも1つをさらに含む、請求項10に記載の方法。
- 身体管路内の関心領域のコンプライアンスおよび/またはエラスタンスを判定するための方法であって、
血管手術を実施するための血管手術器具を前記身体管路内へと挿入することと、
前記器具を用いて前記関心領域に対して前記血管手術の少なくとも一部分を実施することと、
前記身体管路内に検出デバイスを挿入することと、
前記検出デバイスを用いて、前記関心領域についてテストコンプライアンスおよび/またはエラスタンスデータのセットを得ることと、
前記血管手術の前記少なくとも一部分を実施した後に、前記関心領域のコンプライアンスおよび/またはエラスタンスを判定するために、前記テストコンプライアンスおよび/またはエラスタンスデータのセットを、少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータと比較することと
を含む、方法。 - 前記身体管路は血管を含み、前記血管手術は、アテローム切除術、アブレーション、ステント留置、および生体血管スキャフォールド形成から成る群のうちの少なくとも1つを含む、請求項17に記載の方法。
- 前記検出デバイスは、圧力検知ガイドワイヤ、イメージングカテーテルまたはガイドワイヤ、少なくとも1つの可膨張式バルーン、少なくとも1つの研磨要素をその上に備えるとともに前記少なくとも1つの研磨要素内または上に配置されている少なくとも1つの磁石を備える回転駆動シャフト、ならびに、少なくとも1つの研磨要素をその上に備えるとともに前記少なくとも1つの研磨要素内または上に配置されている少なくとも1つの磁気センサを備える回転駆動シャフトから成る群のうちの少なくとも1つを含む、請求項17に記載の方法。
- 前記少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータは、所定の通常値のライブラリおよび/または対象患者の同じもしくは同様の生体管路から得られる実際のデータを含む、請求項17に記載の方法。
- 前記テストコンプライアンスおよび/またはエラスタンスデータは、イメージングデータおよび/または機能データを含む、請求項17に記載の方法。
- 前記イメージングデータは、血管内超音波法(IVUS)または光コヒーレンストモグラフィ(OCT)を使用して得られる、請求項21に記載の方法。
- 前記機能データは、血流予備量比(FFR)、バルーン抵抗力、ならびに磁場生成およびモニタリングから成る群のうちの少なくとも1つを使用して得られる、請求項21に記載の方法。
- 前記機能データは、流速、圧力および流れ抵抗のうちの1つまたは複数のモニタリングされるパラメータをさらに含む、請求項21に記載の方法。
- 前記モニタリングされるパラメータ(複数可)の各々は、前記血管手術が進行するにつれて変化する波形を含む、請求項21に記載の方法。
- 前記機能データは、少なくともバルーン抵抗力を使用して得られ、血管径、血管コンプライアンス、および病変コンプライアンスのモニタリングされるパラメータをさらに含む、請求項21に記載の方法。
- 前記機能データは、少なくとも磁場生成およびモニタリングを使用して得られ、反動速度、血管寸法、病変寸法、血管形状、および病変形状のモニタリングされるパラメータから成る群のうちの少なくとも1つをさらに含む、請求項21に記載の方法。
- 血管手術中に身体管路内の関心領域のコンプライアンスおよび/またはエラスタンスを判定するための方法であって、
前記血管手術を実施するための血管手術器具を前記身体管路内へと挿入することであって、前記血管手術器具は、イメージングまたは機能測定デバイスを含む、挿入することと、
前記血管手術器具を用いて、前記関心領域についてテストコンプライアンスおよび/またはエラスタンスデータのセットを得ることと、
前記関心領域のコンプライアンスおよび/またはエラスタンスを判定するために、前記テストコンプライアンスデータを、少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータと比較することと、
前記テストコンプライアンスおよび/またはエラスタンスデータを取得し、前記関心領域の前記コンプライアンスおよび/またはエラスタンスを判定している間に、前記血管手術器具を用いて前記関心領域に対する前記血管手術を実施することであって、それによって、前記血管手術を実施している間に前記判定されているコンプライアンスおよび/またはエラスタンスの関数として、前記血管手術の状況を評価することと
を含む、方法。 - 生体管路の関心領域に対する血管手術の完全性を評価するための方法であって、
血管手術器具を用いて血管手術を実施することと、
検出デバイスを用いて、前記血管手術の前記実施の前、間および/または後に少なくとも1セットのテストコンプライアンスおよび/またはエラスタンスデータを得、前記少なくとも1セットのテストコンプライアンスおよび/またはエラスタンスデータを、少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータと比較することと、
前記少なくとも1セットのテストコンプライアンスおよび/またはエラスタンスデータの、前記少なくとも1セットの基準コンプライアンスおよび/またはエラスタンスデータとの前記比較に基づいて、前記血管手術の前記完全性を評価することと
を含む、方法。
Applications Claiming Priority (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462026288P | 2014-07-18 | 2014-07-18 | |
| US62/026,288 | 2014-07-18 | ||
| US201462040598P | 2014-08-22 | 2014-08-22 | |
| US62/040,598 | 2014-08-22 | ||
| US201462061883P | 2014-10-09 | 2014-10-09 | |
| US62/061,883 | 2014-10-09 | ||
| US201562119635P | 2015-02-23 | 2015-02-23 | |
| US62/119,635 | 2015-02-23 | ||
| US14/801,269 | 2015-07-16 | ||
| US14/801,269 US10335042B2 (en) | 2013-06-28 | 2015-07-16 | Methods, devices and systems for sensing, measuring and/or characterizing vessel and/or lesion compliance and/or elastance changes during vascular procedures |
| PCT/US2015/040838 WO2016011309A2 (en) | 2014-07-18 | 2015-07-17 | Methods, devices and systems for sensing, measuring and/or characterizing vessel and/or lesion compliance and/or elastance changes during vascular procedures |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017527333A true JP2017527333A (ja) | 2017-09-21 |
| JP2017527333A5 JP2017527333A5 (ja) | 2018-04-12 |
Family
ID=55079175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017502856A Pending JP2017527333A (ja) | 2014-07-18 | 2015-07-17 | 血管または病変のコンプライアンスおよび/または弾性変化を検知、測定および特性化するためのシステム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10335042B2 (ja) |
| EP (1) | EP3169224A4 (ja) |
| JP (1) | JP2017527333A (ja) |
| CN (1) | CN106659390A (ja) |
| AU (1) | AU2015289576A1 (ja) |
| CA (1) | CA2954838A1 (ja) |
| WO (1) | WO2016011309A2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018505003A (ja) * | 2015-02-20 | 2018-02-22 | カーディオバスキュラー システムズ, インコーポレイテッド | 生物学的導管の石灰化壁およびその内部の石灰化病変を破砕するための方法およびシステム |
| JP2021509330A (ja) * | 2017-12-28 | 2021-03-25 | エシコン エルエルシーEthicon LLC | 外科用排出センサ機構 |
Families Citing this family (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| WO2018031714A1 (en) | 2016-08-11 | 2018-02-15 | Foundry Innovation & Research 1, Ltd. | Systems and methods for patient fluid management |
| CA2976465A1 (en) | 2015-02-12 | 2016-08-18 | Foundry Innovation & Research 1, Ltd. | Implantable devices and related methods for heart failure monitoring |
| US11478304B2 (en) * | 2015-03-31 | 2022-10-25 | Medtronic Navigation, Inc. | Flexible circuit coils |
| US11039813B2 (en) | 2015-08-03 | 2021-06-22 | Foundry Innovation & Research 1, Ltd. | Devices and methods for measurement of Vena Cava dimensions, pressure and oxygen saturation |
| EP3442412A2 (en) * | 2016-04-11 | 2019-02-20 | Sensome | Medical device making treatment recommendations based on sensed characteristics of a lesion |
| US11206992B2 (en) | 2016-08-11 | 2021-12-28 | Foundry Innovation & Research 1, Ltd. | Wireless resonant circuit and variable inductance vascular monitoring implants and anchoring structures therefore |
| US11701018B2 (en) | 2016-08-11 | 2023-07-18 | Foundry Innovation & Research 1, Ltd. | Wireless resonant circuit and variable inductance vascular monitoring implants and anchoring structures therefore |
| CN110199358B (zh) | 2016-11-21 | 2023-10-24 | 森索姆公司 | 表征和识别生物结构 |
| EP3705031A1 (en) | 2016-11-29 | 2020-09-09 | Foundry Innovation & Research 1, Ltd. | Wireless resonant circuit and variable inductance vascular implants for monitoring patient vasculature system |
| US11779238B2 (en) | 2017-05-31 | 2023-10-10 | Foundry Innovation & Research 1, Ltd. | Implantable sensors for vascular monitoring |
| EP3629937A1 (en) | 2017-05-31 | 2020-04-08 | Foundry Innovation & Research 1, Ltd. | Implantable ultrasonic vascular sensor |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11925373B2 (en) | 2017-10-30 | 2024-03-12 | Cilag Gmbh International | Surgical suturing instrument comprising a non-circular needle |
| US11844579B2 (en) | 2017-12-28 | 2023-12-19 | Cilag Gmbh International | Adjustments based on airborne particle properties |
| US20190201113A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Controls for robot-assisted surgical platforms |
| US11376002B2 (en) | 2017-12-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument cartridge sensor assemblies |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11969142B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11257589B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Real-time analysis of comprehensive cost of all instrumentation used in surgery utilizing data fluidity to track instruments through stocking and in-house processes |
| US11026751B2 (en) | 2017-12-28 | 2021-06-08 | Cilag Gmbh International | Display of alignment of staple cartridge to prior linear staple line |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US12062442B2 (en) | 2017-12-28 | 2024-08-13 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11076921B2 (en) | 2017-12-28 | 2021-08-03 | Cilag Gmbh International | Adaptive control program updates for surgical hubs |
| US12096916B2 (en) | 2017-12-28 | 2024-09-24 | Cilag Gmbh International | Method of sensing particulate from smoke evacuated from a patient, adjusting the pump speed based on the sensed information, and communicating the functional parameters of the system to the hub |
| US11464559B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Estimating state of ultrasonic end effector and control system therefor |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US11602393B2 (en) | 2017-12-28 | 2023-03-14 | Cilag Gmbh International | Surgical evacuation sensing and generator control |
| US12127729B2 (en) | 2017-12-28 | 2024-10-29 | Cilag Gmbh International | Method for smoke evacuation for surgical hub |
| US20190206569A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of cloud based data analytics for use with the hub |
| US20190201039A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Situational awareness of electrosurgical systems |
| US11998193B2 (en) | 2017-12-28 | 2024-06-04 | Cilag Gmbh International | Method for usage of the shroud as an aspect of sensing or controlling a powered surgical device, and a control algorithm to adjust its default operation |
| US11179175B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Controlling an ultrasonic surgical instrument according to tissue location |
| US11969216B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Surgical network recommendations from real time analysis of procedure variables against a baseline highlighting differences from the optimal solution |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11986233B2 (en) | 2018-03-08 | 2024-05-21 | Cilag Gmbh International | Adjustment of complex impedance to compensate for lost power in an articulating ultrasonic device |
| US11344326B2 (en) | 2018-03-08 | 2022-05-31 | Cilag Gmbh International | Smart blade technology to control blade instability |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| EP3583892A1 (en) * | 2018-06-20 | 2019-12-25 | Koninklijke Philips N.V. | Pressure sensing unit, system and method for remote pressure sensing |
| EP3666210B1 (de) * | 2018-12-14 | 2024-02-21 | Siemens Healthineers AG | Planungsunterstützung für einen interventionellen eingriff sowie entsprechende geräte und computerprogramme |
| US11517309B2 (en) | 2019-02-19 | 2022-12-06 | Cilag Gmbh International | Staple cartridge retainer with retractable authentication key |
| EP3777782A1 (de) * | 2019-08-14 | 2021-02-17 | Biotronik Ag | Lernendes medizinisches system für eine optimale stenteinbettung bei der angioplastie |
| US11877769B2 (en) * | 2021-02-25 | 2024-01-23 | Cardiovascular Systems, Inc. | Atherectomy system current sensing, processing and display |
| US12052267B2 (en) * | 2021-03-05 | 2024-07-30 | Battelle Memorial Institute | System and method for digital imaging and communications in security standard compliance validation |
| DE102023203919A1 (de) | 2023-04-27 | 2024-10-31 | Siemens Healthineers Ag | Verfahren zur Abschätzung eines Risikos für eine Ruptur eines Hohlorgans, Datenverarbeitungsvorrichtung, Bildgebungssystem und Computerprogrammprodukt |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3661148A (en) * | 1970-04-13 | 1972-05-09 | Univ California | Induction type artery gage |
| US5275169A (en) * | 1992-01-15 | 1994-01-04 | Innovation Associates | Apparatus and method for determining physiologic characteristics of body lumens |
| WO1999034724A2 (en) * | 1998-01-12 | 1999-07-15 | Florence Medical Ltd. | Characterizing blood vessel using multi-point pressure measurements |
| US20030092977A1 (en) * | 2001-10-12 | 2003-05-15 | Sahatjian Ronald A. | Catheter Lesion diagnostics |
| US20070083126A1 (en) * | 2005-09-27 | 2007-04-12 | Angiometrx, Inc. | Apparatus & method for determining physiologic characteristics of body lumens |
| WO2012166332A1 (en) * | 2011-05-27 | 2012-12-06 | Lightlab Imaging, Inc. | Optical coherence tomography and pressure based systems and methods |
Family Cites Families (82)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3000197A (en) | 1959-01-13 | 1961-09-19 | Allpatent Ag | Flexible coupling member |
| US3177684A (en) | 1963-02-28 | 1965-04-13 | Kaman Aircraft Corp | Rotary power transmitting device |
| US4651738A (en) | 1985-08-02 | 1987-03-24 | Baylor College Of Medicine | Method and device for performing transluminal angioplasty |
| US5154705A (en) | 1987-09-30 | 1992-10-13 | Lake Region Manufacturing Co., Inc. | Hollow lumen cable apparatus |
| US6685696B2 (en) | 1987-09-30 | 2004-02-03 | Lake Region Manufacturing, Inc. | Hollow lumen cable apparatus |
| US4932419A (en) | 1988-03-21 | 1990-06-12 | Boston Scientific Corporation | Multi-filar, cross-wound coil for medical devices |
| US5372138A (en) | 1988-03-21 | 1994-12-13 | Boston Scientific Corporation | Acousting imaging catheters and the like |
| US4951677A (en) | 1988-03-21 | 1990-08-28 | Prutech Research And Development Partnership Ii | Acoustic imaging catheter and the like |
| US5084060A (en) | 1989-02-15 | 1992-01-28 | Freund Precision, Inc. | Apparatus for enlarging a vessel or clearing obstructive tissue from a vessel according to vessel compliance |
| US5052404A (en) | 1989-03-02 | 1991-10-01 | The Microspring Company, Inc. | Torque transmitter |
| US5103543A (en) | 1989-03-02 | 1992-04-14 | The Microspring Company, Inc. | Method of making a torque transmitter |
| US5115814A (en) | 1989-08-18 | 1992-05-26 | Intertherapy, Inc. | Intravascular ultrasonic imaging probe and methods of using same |
| US5464407A (en) | 1991-02-19 | 1995-11-07 | Mcguire; David A. | Flexible surgical screwdriver and methods of arthroscopic ligament reconstruction |
| US5438997A (en) | 1991-03-13 | 1995-08-08 | Sieben; Wayne | Intravascular imaging apparatus and methods for use and manufacture |
| AU687723B2 (en) | 1991-06-12 | 1998-03-05 | Florida Atlantic University Research Corp. | Detecting atherosclerosis in humans |
| US5171299A (en) | 1991-08-02 | 1992-12-15 | Baxter International Inc. | Balloon catheter inflation pressure and diameter display apparatus and method |
| US5360432A (en) | 1992-10-16 | 1994-11-01 | Shturman Cardiology Systems, Inc. | Abrasive drive shaft device for directional rotational atherectomy |
| US5836868A (en) | 1992-11-13 | 1998-11-17 | Scimed Life Systems, Inc. | Expandable intravascular occlusion material removal devices and methods of use |
| US5540707A (en) | 1992-11-13 | 1996-07-30 | Scimed Life Systems, Inc. | Expandable intravascular occlusion material removal devices and methods of use |
| NL9301329A (nl) | 1993-07-29 | 1995-02-16 | Cordis Europ | Balloncatheter met drukindicator. |
| US5423323A (en) | 1993-08-30 | 1995-06-13 | Rocky Mountain Research, Inc. | System for calculating compliance and cardiac hemodynamic parameters |
| US5437282A (en) | 1993-10-29 | 1995-08-01 | Boston Scientific Corporation | Drive shaft for acoustic imaging catheters and flexible catheters |
| CA2160698A1 (en) | 1993-12-09 | 1995-06-15 | Charles Milo | Composite drive shaft |
| IL109669A (en) | 1994-05-17 | 1997-09-30 | Hadasit Med Res Service | System and method for coronary angioplasty |
| CH689170A5 (it) | 1994-07-11 | 1998-11-13 | Weissenfluh Hawe Neos | Alberino flessibile non deformabile radialmente né longitudinalmente e apparecchio avvolgimatrici per uso odontoiatrico. |
| US5522875A (en) | 1994-07-28 | 1996-06-04 | Medtronic, Inc. | Medical electrical lead system having a torque transfer stylet |
| US5752522A (en) | 1995-05-04 | 1998-05-19 | Cardiovascular Concepts, Inc. | Lesion diameter measurement catheter and method |
| US5865801A (en) | 1995-07-18 | 1999-02-02 | Houser; Russell A. | Multiple compartmented balloon catheter with external pressure sensing |
| JP3109415B2 (ja) | 1995-08-07 | 2000-11-13 | トヨタ自動車株式会社 | フレキシブルシャフト構造 |
| US5771895A (en) | 1996-02-12 | 1998-06-30 | Slager; Cornelis J. | Catheter for obtaining three-dimensional reconstruction of a vascular lumen and wall |
| US6217595B1 (en) | 1996-11-18 | 2001-04-17 | Shturman Cardiology Systems, Inc. | Rotational atherectomy device |
| US6494890B1 (en) | 1997-08-14 | 2002-12-17 | Shturman Cardiology Systems, Inc. | Eccentric rotational atherectomy device |
| US6052610A (en) * | 1998-01-09 | 2000-04-18 | International Business Machines Corporation | Magnetic catheter tracker and method therefor |
| US9254143B2 (en) | 1998-02-25 | 2016-02-09 | Revascular Therapeutics, Inc. | Guidewire for crossing occlusions or stenoses having a shapeable distal end |
| US6824550B1 (en) | 2000-04-06 | 2004-11-30 | Norbon Medical, Inc. | Guidewire for crossing occlusions or stenosis |
| US6179858B1 (en) | 1998-05-12 | 2001-01-30 | Massachusetts Institute Of Technology | Stent expansion and apposition sensing |
| US5992419A (en) | 1998-08-20 | 1999-11-30 | Mmtc, Inc. | Method employing a tissue-heating balloon catheter to produce a "biological stent" in an orifice or vessel of a patient's body |
| US6419644B1 (en) | 1998-09-08 | 2002-07-16 | Scimed Life Systems, Inc. | System and method for intraluminal imaging |
| US6793634B2 (en) | 1998-10-23 | 2004-09-21 | Scimed Life Systems, Inc. | System and method for intraluminal imaging |
| US6793652B1 (en) * | 1999-06-02 | 2004-09-21 | Power Medical Interventions, Inc. | Electro-mechanical surgical device |
| US6354999B1 (en) | 2000-01-14 | 2002-03-12 | Florence Medical Ltd. | System and method for detecting, localizing, and characterizing occlusions and aneurysms in a vessel |
| US6280332B1 (en) | 2000-02-02 | 2001-08-28 | Robert Charles Knutson | Bi-directional, dual wrap spring, torsional coupler with decoupling means |
| CA2403925C (en) | 2000-04-05 | 2008-09-16 | Stx Medical, Inc. | Intralumenal material removal systems and methods |
| US6616597B2 (en) | 2000-12-12 | 2003-09-09 | Datascope Investment Corp. | Intra-aortic balloon catheter having a dual sensor pressure sensing system |
| US6669662B1 (en) | 2000-12-27 | 2003-12-30 | Advanced Cardiovascular Systems, Inc. | Perfusion catheter |
| US20020103430A1 (en) * | 2001-01-29 | 2002-08-01 | Hastings Roger N. | Catheter navigation within an MR imaging device |
| WO2003043685A2 (en) | 2001-11-19 | 2003-05-30 | Cardiovascular Systems, Inc | High torque, low profile intravascular guidewire system |
| WO2003070091A1 (en) | 2002-02-22 | 2003-08-28 | Hans Gregersen | Method and apparatus for investigating force-deformation properties in muscles in walls of bodily hollow systems |
| US6776764B2 (en) | 2002-03-01 | 2004-08-17 | University Of Pittsburgh Of The Commonwealth System Of Higher Education | Use of aortic pulse pressure and flow in bedside hemodynamic management |
| US7077812B2 (en) | 2002-11-22 | 2006-07-18 | The Board Regents Of The University System | Apparatus and method for palpographic characterization of vulnerable plaque and other biological tissue |
| EP1592342A4 (en) | 2003-01-16 | 2009-05-27 | Galil Medical Ltd | DEVICE, SYSTEM AND METHOD FOR DETECTING, LOCATING AND IDENTIFYING A PLAQUE-INDUCED TRANSMISSION OF A BLOOD VESSEL |
| US8465452B2 (en) | 2003-02-21 | 2013-06-18 | 3Dt Holdings, Llc | Devices, systems, and methods for removing stenotic lesions from vessels |
| WO2004075928A2 (en) | 2003-02-21 | 2004-09-10 | Electro-Cat, Llc | System and method for measuring cross-sectional areas and pressure gradients in luminal organs |
| US8185194B2 (en) | 2003-02-21 | 2012-05-22 | Dtherapeutics, Llc | Systems and methods for determining phasic cardiac cycle measurements |
| US7220230B2 (en) | 2003-12-05 | 2007-05-22 | Edwards Lifesciences Corporation | Pressure-based system and method for determining cardiac stroke volume |
| US7397935B2 (en) | 2004-05-10 | 2008-07-08 | Mediguide Ltd. | Method for segmentation of IVUS image sequences |
| WO2006002635A1 (en) | 2004-06-30 | 2006-01-12 | Gregersen Enterprises Aps | Morphometry of a bodily hollow system |
| ES2379468T3 (es) | 2004-08-24 | 2012-04-26 | The General Hospital Corporation | Procedimiento, sistema y configuración de software para determinar el módulo de elasticidad |
| US20060052700A1 (en) * | 2004-09-08 | 2006-03-09 | Radi Medical Systems Ab | Pressure measurement system |
| WO2006090351A1 (en) | 2005-02-21 | 2006-08-31 | Diagles Ltd | Method and apparatus for mechanical measurement of sphincters and narrowing regions in hollow biological organs |
| DE102005045373A1 (de) | 2005-09-22 | 2007-04-05 | Siemens Ag | Kathetervorrichtung |
| US20070232933A1 (en) | 2005-10-13 | 2007-10-04 | Volcano Corporation | Component-based catheter lab intravascular ultrasound system |
| DE102005059262B4 (de) | 2005-12-12 | 2008-02-07 | Siemens Ag | Kathetervorrichtung |
| US20090018566A1 (en) | 2006-06-30 | 2009-01-15 | Artheromed, Inc. | Atherectomy devices, systems, and methods |
| US8289284B2 (en) | 2007-08-09 | 2012-10-16 | Volcano Corporation | Controller user interface for a catheter lab intravascular ultrasound system |
| US8131379B2 (en) | 2007-08-27 | 2012-03-06 | St. Jude Medical Atrial Fibrillation Division, Inc. | Cardiac tissue elasticity sensing |
| US20090284332A1 (en) | 2008-05-15 | 2009-11-19 | Silicon Valley Medical Instruments, Inc. | Ivus system with rotary capacitive coupling |
| US8437833B2 (en) * | 2008-10-07 | 2013-05-07 | Bard Access Systems, Inc. | Percutaneous magnetic gastrostomy |
| GB0905751D0 (en) * | 2009-04-03 | 2009-05-20 | Shturman Leonid | Rotational atherectomy device with distal embolic protection and method of use |
| WO2010131178A1 (en) * | 2009-05-15 | 2010-11-18 | Koninklijke Philips Electronics N.V. | Apparatus, method and computer program for determining a property of a heart |
| EP2314331B1 (de) | 2009-10-23 | 2013-12-11 | ECP Entwicklungsgesellschaft mbH | Katheterpumpenanordnung und flexible Wellenanordnung mit einer Seele |
| EP2359891B1 (de) | 2010-02-16 | 2013-01-23 | Miracor Medical Systems GmbH | Steuer- und Aufblasgerät für einen Ballonkatheter |
| US20110295107A1 (en) | 2010-05-25 | 2011-12-01 | Siemens Medical Solutions Usa, Inc. | Catheter System for Measuring and Marking Vessel Characteristics |
| US7947001B1 (en) | 2010-06-07 | 2011-05-24 | Sarvazyan Armen P | Methods and devices for measuring structural and elastic properties of a hollow organ |
| JP2012029864A (ja) | 2010-07-30 | 2012-02-16 | Fujifilm Corp | 内視鏡装着具 |
| JP2012029865A (ja) | 2010-07-30 | 2012-02-16 | Fujifilm Corp | 内視鏡装着具 |
| US8597170B2 (en) | 2011-01-05 | 2013-12-03 | Thoratec Corporation | Catheter pump |
| US20120245457A1 (en) | 2011-03-25 | 2012-09-27 | Crowley Robert J | Ultrasound imaging catheters and guidewires with non-interfering and coordinated position and orientation sensors |
| US20120265062A1 (en) | 2011-04-13 | 2012-10-18 | St. Jude Medical, Inc. | Optical coherence tomography catheter for elastographic property mapping of lumens utilizing micropalpation |
| WO2013082310A1 (en) | 2011-12-02 | 2013-06-06 | Barosense, Inc. | Positioning device and articulation assembly for remote positioning of a tool |
| US9549679B2 (en) * | 2012-05-14 | 2017-01-24 | Acist Medical Systems, Inc. | Multiple transducer delivery device and method |
| US20150080747A1 (en) | 2013-06-28 | 2015-03-19 | Cardiovascular Systems, Inc. | Devices, systems and methods for locally measuring biological conduit and/or lesion compliance, opposition force and inner diameter of a biological conduit |
-
2015
- 2015-07-16 US US14/801,269 patent/US10335042B2/en active Active
- 2015-07-17 CN CN201580039373.2A patent/CN106659390A/zh active Pending
- 2015-07-17 EP EP15821492.4A patent/EP3169224A4/en not_active Ceased
- 2015-07-17 AU AU2015289576A patent/AU2015289576A1/en not_active Abandoned
- 2015-07-17 CA CA2954838A patent/CA2954838A1/en not_active Abandoned
- 2015-07-17 WO PCT/US2015/040838 patent/WO2016011309A2/en active Application Filing
- 2015-07-17 JP JP2017502856A patent/JP2017527333A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3661148A (en) * | 1970-04-13 | 1972-05-09 | Univ California | Induction type artery gage |
| US5275169A (en) * | 1992-01-15 | 1994-01-04 | Innovation Associates | Apparatus and method for determining physiologic characteristics of body lumens |
| WO1999034724A2 (en) * | 1998-01-12 | 1999-07-15 | Florence Medical Ltd. | Characterizing blood vessel using multi-point pressure measurements |
| US20030092977A1 (en) * | 2001-10-12 | 2003-05-15 | Sahatjian Ronald A. | Catheter Lesion diagnostics |
| US20070083126A1 (en) * | 2005-09-27 | 2007-04-12 | Angiometrx, Inc. | Apparatus & method for determining physiologic characteristics of body lumens |
| WO2012166332A1 (en) * | 2011-05-27 | 2012-12-06 | Lightlab Imaging, Inc. | Optical coherence tomography and pressure based systems and methods |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018505003A (ja) * | 2015-02-20 | 2018-02-22 | カーディオバスキュラー システムズ, インコーポレイテッド | 生物学的導管の石灰化壁およびその内部の石灰化病変を破砕するための方法およびシステム |
| JP2021509330A (ja) * | 2017-12-28 | 2021-03-25 | エシコン エルエルシーEthicon LLC | 外科用排出センサ機構 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2954838A1 (en) | 2016-01-21 |
| EP3169224A4 (en) | 2018-03-07 |
| EP3169224A2 (en) | 2017-05-24 |
| WO2016011309A2 (en) | 2016-01-21 |
| US20160183807A1 (en) | 2016-06-30 |
| AU2015289576A1 (en) | 2017-01-12 |
| US10335042B2 (en) | 2019-07-02 |
| WO2016011309A3 (en) | 2016-03-10 |
| CN106659390A (zh) | 2017-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017527333A (ja) | 血管または病変のコンプライアンスおよび/または弾性変化を検知、測定および特性化するためのシステム | |
| JP7391100B2 (ja) | 管腔内超音波イメージングのための速度決定、並びに関連するデバイス、システム、及び方法 | |
| JP2017527333A5 (ja) | ||
| JP2022509453A (ja) | 管腔内超音波血管境界の選択並びに関連するデバイス、システム、および方法 | |
| JP2017532084A (ja) | 血管手術中の血管および/または病変のコンプライアンスおよび/またはエラスタンス変化を検知、測定および/または特性化するための方法、デバイス、およびシステム | |
| US20140236011A1 (en) | Methods and systems for simultaneous interventional imaging and functional measurements | |
| JP7152955B2 (ja) | 動作ベースの画像セグメント化のシステムおよび方法 | |
| JP2016529956A (ja) | 局所的に生体導管および/または病変コンプライアンス、生体導管の反対力および内径を測定するための装置、システムならびに方法 | |
| CN112638263B (zh) | 管内装置移动速度指导和相关联的装置、系统和方法 | |
| JP2022509391A (ja) | 管腔内超音波方向性ガイダンス、並びに関連するデバイス、システム、及び方法 | |
| WO2023070968A1 (zh) | 介入手术机器人系统以及导航方法 | |
| US12070359B2 (en) | Automated control of intraluminal data acquisition and associated devices, systems, and methods | |
| JP2017217495A (ja) | リアルタイムの内蔵の機械機能を評価するための形状検出する装置 | |
| WO2021115958A1 (en) | Intraluminal image-based vessel diameter determination and associated devices, systems, and methods | |
| JP6668391B2 (ja) | 回転式医療システム | |
| Lawson et al. | Endovascular detection of catheter-thrombus contact by vacuum excitation | |
| WO2023046651A2 (en) | Intravascular reperfusion therapy with an expandable structure and associated devices, systems, and methods | |
| WO2023046501A1 (en) | Intravascular balloon reperfusion therapy devices, systems, and methods |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20180223 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190806 |