JP2017520002A - 高高度航空カメラシステム - Google Patents
高高度航空カメラシステム Download PDFInfo
- Publication number
- JP2017520002A JP2017520002A JP2017518385A JP2017518385A JP2017520002A JP 2017520002 A JP2017520002 A JP 2017520002A JP 2017518385 A JP2017518385 A JP 2017518385A JP 2017518385 A JP2017518385 A JP 2017518385A JP 2017520002 A JP2017520002 A JP 2017520002A
- Authority
- JP
- Japan
- Prior art keywords
- camera
- view
- detail
- movable
- field
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000033001 locomotion Effects 0.000 claims description 80
- 230000007246 mechanism Effects 0.000 claims description 40
- 230000003287 optical effect Effects 0.000 claims description 31
- 230000000694 effects Effects 0.000 claims description 8
- 208000007345 glycogen storage disease Diseases 0.000 description 43
- 238000003384 imaging method Methods 0.000 description 23
- 238000013461 design Methods 0.000 description 21
- 239000002131 composite material Substances 0.000 description 17
- 238000000034 method Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 9
- 230000001965 increasing effect Effects 0.000 description 9
- 239000013598 vector Substances 0.000 description 9
- 230000000007 visual effect Effects 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 7
- 238000004364 calculation method Methods 0.000 description 6
- 238000003860 storage Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000009897 systematic effect Effects 0.000 description 4
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 230000006641 stabilisation Effects 0.000 description 3
- 238000011105 stabilization Methods 0.000 description 3
- 241001466538 Gymnogyps Species 0.000 description 2
- WYTGDNHDOZPMIW-RCBQFDQVSA-N alstonine Natural products C1=CC2=C3C=CC=CC3=NC2=C2N1C[C@H]1[C@H](C)OC=C(C(=O)OC)[C@H]1C2 WYTGDNHDOZPMIW-RCBQFDQVSA-N 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000000701 chemical imaging Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000011143 downstream manufacturing Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 239000005304 optical glass Substances 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 238000000275 quality assurance Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images
































































































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENTS OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D47/00—Equipment not otherwise provided for
- B64D47/08—Arrangements of cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C11/00—Photogrammetry or videogrammetry, e.g. stereogrammetry; Photographic surveying
- G01C11/02—Picture taking arrangements specially adapted for photogrammetry or photographic surveying, e.g. controlling overlapping of pictures
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/101—Scanning systems with both horizontal and vertical deflecting means, e.g. raster or XY scanners
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B15/00—Special procedures for taking photographs; Apparatus therefor
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B15/00—Special procedures for taking photographs; Apparatus therefor
- G03B15/006—Apparatus mounted on flying objects
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B37/00—Panoramic or wide-screen photography; Photographing extended surfaces, e.g. for surveying; Photographing internal surfaces, e.g. of pipe
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B37/00—Panoramic or wide-screen photography; Photographing extended surfaces, e.g. for surveying; Photographing internal surfaces, e.g. of pipe
- G03B37/04—Panoramic or wide-screen photography; Photographing extended surfaces, e.g. for surveying; Photographing internal surfaces, e.g. of pipe with cameras or projectors providing touching or overlapping fields of view
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/58—Means for changing the camera field of view without moving the camera body, e.g. nutating or panning of optics or image sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/698—Control of cameras or camera modules for achieving an enlarged field of view, e.g. panoramic image capture
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/40—Extracting pixel data from image sensors by controlling scanning circuits, e.g. by modifying the number of pixels sampled or to be sampled
- H04N25/41—Extracting pixel data from a plurality of image sensors simultaneously picking up an image, e.g. for increasing the field of view by combining the outputs of a plurality of sensors
Abstract
Description
(ファイ、680)に応じた、スナップショットレート(r)、フレームレート(q)、および領域撮影レート(R)の、36M画素カメラを含むX構成可動式カメラ装置100についてまとめられた表を示す。この表は、7cmの一定のGSD(ひいては高度と共に増加する焦点距離)に基づく。日別撮影レートは、1日当たり6時間の測量時間に基づく。
110 詳細カメラ
112 概観カメラ
114 詳細カメラレンズ
116 概観カメラレンズ
118 特殊用途(例えばNIR)カメラのレンズ
120 フレーム
122 フレーム中央支持部
124 フレーム側部支持部
126 フレーム後部支持部
128 フレーム前部支持部
130 装着点ブロック
132 装着点
134 装着ボルト
140 詳細カメラの架台
142 概観カメラの架台
144 詳細カメラレンズのクランプ
146 概観カメラレンズのクランプ
150 電源および制御分電箱
160 詳細視野
162 横方向詳細視野
164 縦方向詳細視野
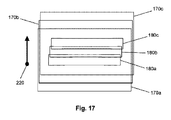
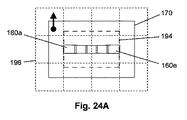
170 概観視野
172 横方向概観視野
174 縦方向概観視野
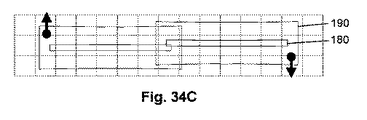
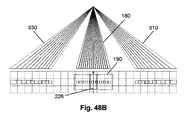
180 集成詳細視野
182 横方向集成詳細視野
190 集成概観視野
192 横方向集成概観視野
194 30度の公称視野
196 1kmグリッド
200 アダプター板
202 シートトラック留め具
210 航空機床面
212 カメラ穴
214 シートラック
216 アダプター板開口部
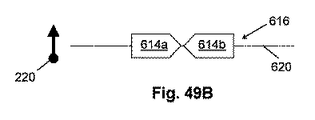
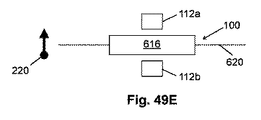
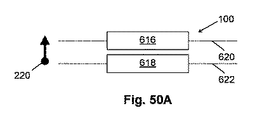
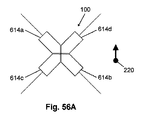
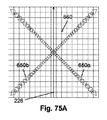
220 飛行方向
222 航路
224 スナップショット位置
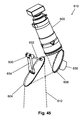
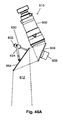
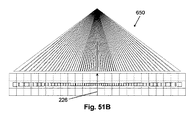
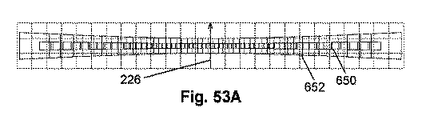
226 飛行経路
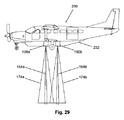
230 航空測量機
232 航空測量機胴体下側部分に装着されるポッド
250 視野角(ベータ)
252 焦点距離(f)
254 地面からの高度(a)
256 画像センサ幅(s)
258 走査幅(w)
260 画像センサ画素ピッチ(p)
262 地上分解能(GSD)(g)
270 集成視野角(ガンマ)
272 カメラの角重複(オメガ)
278 集成走査幅(w(N))
280 カメラ傾斜角(テータ)
282 傾斜させたカメラのGSD(g(テータ))
284 傾斜させたカメラの視野
286 傾斜焦点面を有する傾斜させたカメラのGSD(h(テータ))
288 傾斜焦点面視野を有する傾斜させたカメラの視野
300 コンピュータ
302 パイロット用ディスプレイ
304 慣性計測装置(IMU)
306 全地球的航法衛星システム(GNSS)受信機
308 カメラインターフェース
310 カメラ制御装置(CCU)
320 バッテリ装置
322 航空機補助電源
324 地上電源車(GPU)
326 DC−DC変換器
330 角運動補償(AMC)装置(複数可)
400 詳細写真
402 概観写真
404 オルソモザイク
410 特徴適合ステップ
412 姿勢および位置解決ステップ
414 正射投影ステップ
416 ブレンドステップ
510 右斜め詳細視野
512 横方向右斜め詳細視野
514 縦方向右斜め詳細視野
520 右斜め概観視野
522 横方向右斜め概観視野
524 縦方向右斜め概観視野
530 左斜め詳細視野
532 横方向左斜め詳細視野
534 縦方向左斜め詳細視野
540 左斜め概観視野
542 横方向左斜め概観視野
544 縦方向左斜め概観視野
550 前斜め詳細視野
552 横方向前斜め詳細視野
554 縦方向前斜め詳細視野
560 前斜め概観視野
562 横方向前斜め概観視野
564 縦方向前斜め概観視野
570 後斜め詳細視野
572 横方向後斜め詳細視野
574 縦方向後斜め詳細視野
580 後斜め概観視野
582 横方向後斜め概観視野
584 縦方向後斜め概観視野
600 カメラ
602 カメラ光軸
604 可動式多重化ミラー
606 固定ミラー
608 可動式運動補償ミラー
610 可動式カメラモジュール
612 カメラ視野
614 2分の1視野可動式詳細カメラモジュール
616 全視野可動式詳細カメラモジュール
618 全視野可動式概観カメラモジュール
620 詳細カメラ操作軸
622 概観カメラ操作軸
624 2視野可動式カメラモジュール
626 2視野詳細可動式カメラモジュール
630 多重化ミラーリニアモータ
632 多重化ミラーアクチュエータロッド
634 多重化ミラー架台
636 運動補償ミラーステージ
638 多重化ミラーステージ
640 多重化ミラー制御装置
642 運動補償ミラー制御装置
644 多重化ミラーセンサ
646 運度補償ミラーセンサ
648 多重化ミラー回転モータ
650 広角集成詳細視野
652 広角集成概観視野
654 隙間視野
656 切り換えミラー
658 切り換えミラー回転モータ
660 X構成複合詳細視野
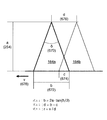
670 縦方向視野角(デルタ)
672 縦方向フットプリント(b)
674 縦方向重複(c)
676 縦方向スナップショット間隔(d)
678 航空機地動速度(V)
680 使用可能な垂直視野角(ファイ)
682 横方向飛行経路間隔(e)
684 横方向視野軸
686 視野軸回転角(ラムダ)
688 回転した横方向視野軸
690 回転した軸での縦方向スナップショット間隔(d(ラムダ))
692 回転した軸での飛行経路間隔(e(ラムダ))
700 画像入力/出力モジュール
702 画像記憶デバイス
704 パイロット入力デバイス
706 オートパイロット
710 カメラマイクロコントローラ
712 カメラモジュール制御インターフェース
714 カメラ制御インターフェース
716 画像ストリームインターフェース
720 操作運動ベクトル
722 順方向運動ベクトル
724 合成運動ベクトル
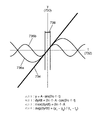
730 角度位置(y)
732 時間(t)
734 多重化ミラー角度位置グラフ
736 運動補償ミラー角度位置グラフ
738 露出区間
Claims (20)
- 航空画像を撮るためのシステムであって、
少なくとも1つの可動式詳細カメラモジュールを備え、
前記可動式詳細カメラモジュールは、詳細カメラ、および、前記カメラの指示方向がより広い有効な視野をもたらすために時間多重化される、前記カメラモジュールの光路における第1のビームステアリング機構を含む、システム。 - 請求項1に記載のシステムであって、
前記第1のビームステアリング機構は、前記詳細カメラモジュールの光軸に対して傾斜させた第1の可動式ミラーを備え、前記第1の可動式ミラーはビームステアリングをもたらすために前記光軸を中心に転回するように適応される、システム。 - 請求項1に記載のシステムであって、
カメラ穴より上に、航空機の床面および航空機によって運搬されるポッドの床面のうちの少なくとも1つに取り付け可能であることによって、前記カメラ穴を通して前記航空機より下の地表の光景を前記少なくとも1つの詳細カメラにもたらす、システム。 - 請求項1に記載のシステムであって、
少なくとも1つの概観カメラを備え、前記概観カメラの焦点距離は前記詳細カメラの焦点距離より短い、システム。 - 請求項1に記載のシステムであって、
前記詳細カメラは、屈折レンズ、反射レンズ、および反射屈折レンズを含む群から選択されるレンズを有する、システム。 - 請求項2に記載のシステムであって、
前記第1の可動式ミラーは前記詳細カメラの露出期間中静止している、システム。 - 請求項2に記載のシステムであって、
前記第1の可動式ミラーは前記詳細カメラの露出期間中ゼロ以外の角速度を有し、前記可動式カメラモジュールは、前記詳細カメラ上で、前記露出期間中の前記第1の可動式ミラーの前記角速度の影響を補正することによって、前記露出期間中に前記詳細カメラの指向を確実に一貫した方向にするように構成される、前記光路における第2の可動式ミラーを備える、システム。 - 請求項7に記載のシステムであって、
前記第2の可動式ミラーの角速度は正弦波であり、前記第2の可動式ミラーの平均角速度は、前記露出期間中の前記第1の可動式ミラーの平均角速度に等しい、システム。 - 請求項8に記載のシステムであって、
第1の可動式ミラーの前記角速度は前記露出期間中一定であり、前記第2の可動式ミラーの前記角速度は前記露出期間中最大になる、システム。 - 請求項7に記載のシステムであって、
前記第2の可動式ミラーの前記角速度は前記露出期間中一定である、システム。 - 請求項7に記載のシステムであって、
前記第1の可動式ミラーの前記角速度は正弦波によって変調される定数であり、それによって、前記露出期間中第1の可動式ミラーの前記平均角速度を低減する、システム。 - 請求項1に記載のシステムであって、
少なくとも1つの角運動補償(AMC)装置をさらに備え、前記少なくとも1つの角運動補償(AMC)装置は、前記詳細カメラ上で、前記航空機の角運動の影響を補正することによって、前記詳細カメラの指向を確実に経時的に一貫した方向にするように構成される、システム。 - 請求項12に記載のシステムであって、
角運動補償(AMC)は前記光路において可動式ミラーを介してもたらされる、システム。 - 請求項1に記載のシステムであって、
前記詳細カメラ上で、前記航空機の順方向運動の影響を補正することによって、前記詳細カメラによって撮られる写真のモーションブラーを低減するように構成される少なくとも1つの順方向運動補償(FMC)機構をさらに備える、システム。 - 請求項14に記載のシステムであって、
FMCは、前記光路において可動式ミラーを介してもたらされる、システム。 - 請求項1に記載のシステムであって、
複数の可動式詳細カメラモジュールを備える、システム。 - 請求項16に記載のシステムであって、
可動式詳細カメラモジュールの数は2個で、前記可動式カメラモジュールの前記操作軸はおよそ90度離れるように角のある状態で分布させ、少なくとも1つの操作軸は飛行方向に対しておよそ45度の角度が付けられる、システム。 - 請求項16に記載のシステムであって、
可動式詳細カメラモジュールの数はM個で、前記可動式カメラモジュールの前記操作軸はおよそ180/M度離れるように間隔があけられ、少なくとも1つの操作軸は飛行方向に対しておよそ90/M度の角度が付けられる、システム。 - 請求項2に記載のシステムであって、
前記詳細カメラモジュールは第2のビームステアリング機構を含み、前記第2のビームステアリング機構は前記詳細カメラモジュールの光軸に対して傾斜させた第2の可動式ミラーを含み、前記第2の可動式ミラーはビームステアリングをもたらすために前記光軸を中心に転回するように適応され、前記第1のビームステアリング機構および前記第2のビームステアリング機構は実質的に水平面において互いに直角に装着され、前記カメラモジュールは前記第1のビームステアリング機構と前記第2のビームステアリング機構との間で前記詳細カメラの前記視野を切り換えるための機構を含む、システム。 - 請求項19に記載のシステムであって、
前記切り換え機構は可動式ミラーである、システム。
Applications Claiming Priority (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/310,523 US9046759B1 (en) | 2014-06-20 | 2014-06-20 | Compact multi-resolution aerial camera system |
| US14/310,523 | 2014-06-20 | ||
| US14/478,380 | 2014-09-05 | ||
| US14/478,380 US9052571B1 (en) | 2014-06-20 | 2014-09-05 | Wide-area aerial camera systems |
| US14/687,544 | 2015-04-15 | ||
| US14/687,544 US9440750B2 (en) | 2014-06-20 | 2015-04-15 | Wide-area aerial camera systems |
| US14/718,528 | 2015-05-21 | ||
| US14/718,528 US9706117B2 (en) | 2014-06-20 | 2015-05-21 | Wide-area aerial camera systems |
| US14/718,472 US9188838B1 (en) | 2014-06-20 | 2015-05-21 | Compact multi-resolution aerial camera system |
| US14/718,472 | 2015-05-21 | ||
| US14/735,504 | 2015-06-10 | ||
| US14/735,504 US9185290B1 (en) | 2014-06-20 | 2015-06-10 | Wide-area aerial camera systems |
| PCT/AU2015/050344 WO2015192188A1 (en) | 2014-06-20 | 2015-06-19 | Wide-area aerial camera systems |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017520002A true JP2017520002A (ja) | 2017-07-20 |
| JP6541779B2 JP6541779B2 (ja) | 2019-07-10 |
Family
ID=54363622
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017518385A Active JP6541779B2 (ja) | 2014-06-20 | 2015-06-19 | 高高度航空カメラシステム |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US9185290B1 (ja) |
| EP (1) | EP3158396B1 (ja) |
| JP (1) | JP6541779B2 (ja) |
| CN (1) | CN106662804B (ja) |
| AU (1) | AU2015243032B2 (ja) |
| CA (1) | CA2952933C (ja) |
| ES (1) | ES2724464T3 (ja) |
| WO (1) | WO2015192188A1 (ja) |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014007873A2 (en) * | 2012-03-20 | 2014-01-09 | Wagreich David | Image monitoring and display from unmanned vehicle |
| US20140327733A1 (en) | 2012-03-20 | 2014-11-06 | David Wagreich | Image monitoring and display from unmanned vehicle |
| CN103400345A (zh) * | 2013-07-18 | 2013-11-20 | 西南交通大学 | 一种降低tdi-ccd相机图像模糊度的方法 |
| CN103646384B (zh) * | 2013-12-20 | 2016-06-22 | 江苏大学 | 一种遥感扫描成像平台飞行速度的优化方法 |
| US9185290B1 (en) * | 2014-06-20 | 2015-11-10 | Nearmap Australia Pty Ltd | Wide-area aerial camera systems |
| US9641736B2 (en) | 2014-06-20 | 2017-05-02 | nearmap australia pty ltd. | Wide-area aerial camera systems |
| EP3204786B1 (en) | 2014-10-08 | 2020-01-08 | Spookfish Innovations Pty Ltd. | An aerial camera system |
| CN105366067A (zh) * | 2015-11-30 | 2016-03-02 | 湖北易瓦特科技股份有限公司 | 拍摄装置和无人机 |
| CN106441239A (zh) * | 2016-08-31 | 2017-02-22 | 中测新图(北京)遥感技术有限责任公司 | 一种无人机用多视角立体航摄装置 |
| CN106441240B (zh) * | 2016-10-13 | 2019-01-01 | 中国科学院上海技术物理研究所 | 一种基于凸轮机构的面阵成像仪高频像移补偿装置 |
| US10621780B2 (en) * | 2017-02-02 | 2020-04-14 | Infatics, Inc. | System and methods for improved aerial mapping with aerial vehicles |
| IL251544A0 (en) * | 2017-04-03 | 2017-06-29 | Elbit Systems Electro Optics Elop Ltd | A system and method for increasing the coverage of the photographed area using a photographic device |
| CN107031857A (zh) * | 2017-04-24 | 2017-08-11 | 桂林天经地纬遥感信息技术有限公司 | 一种用于固定翼无人机三维建模的采集装置 |
| US20200193158A1 (en) * | 2017-08-14 | 2020-06-18 | Purdue Research Foundation | System and method for plant sensing using aerial rgb imagery |
| CN108327922A (zh) * | 2018-01-26 | 2018-07-27 | 广州市红鹏直升机遥感科技有限公司 | 一种九视角航空倾斜摄影云台 |
| FR3087037B1 (fr) * | 2018-10-03 | 2021-06-04 | Soletanche Freyssinet | Procede d'acquisition d'images |
| EP3977050A4 (en) * | 2019-05-24 | 2023-03-08 | Aerometrex Pty Ltd | AIR IMAGING SYSTEM AND METHODS |
| US11036983B1 (en) * | 2019-06-20 | 2021-06-15 | Sentera, Inc. | Aerial imaging wide and narrow stitching |
| RU2725009C1 (ru) * | 2019-07-23 | 2020-06-29 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Система управления размещенной на космическом корабле переносной аппаратурой наблюдения |
| RU2717614C1 (ru) * | 2019-07-23 | 2020-03-24 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Способ управления размещенной на космическом корабле переносной аппаратурой наблюдения |
| RU2717603C1 (ru) * | 2019-07-23 | 2020-03-24 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" им. С.П. Королёва" | Устройство управления размещенной на космическом корабле переносной аппаратурой наблюдения |
| RU2725104C1 (ru) * | 2019-09-09 | 2020-06-29 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва | Способ управления размещенной на космическом корабле переносной аппаратурой наблюдения |
| RU2725012C1 (ru) * | 2019-09-09 | 2020-06-29 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Система управления размещенной на космическом корабле переносной аппаратурой наблюдения |
| US11320667B2 (en) * | 2019-09-27 | 2022-05-03 | Snap Inc. | Automated video capture and composition system |
| CN112764306B (zh) * | 2019-10-21 | 2024-04-12 | 广州口可口可软件科技有限公司 | 一种虚拟现实全景图像采集装置 |
| CN111314641B (zh) * | 2020-02-18 | 2022-05-10 | 东南大学 | 一种高帧频图像的采集存储显示系统及方法 |
| CN111355899B (zh) * | 2020-02-23 | 2021-03-19 | 中国科学院西安光学精密机械研究所 | 一种太空全景成像系统及成像方法 |
| CN111427829B (zh) * | 2020-03-13 | 2022-03-01 | 浙江华睿科技股份有限公司 | CoaXPress协议的低速上行信号解调电路、CoaXPress协议的驱动电路 |
| JP6844055B1 (ja) * | 2020-05-29 | 2021-03-17 | 丸善インテック株式会社 | 監視カメラ |
| US11722776B2 (en) | 2021-06-28 | 2023-08-08 | nearmap australia pty ltd. | Hyper camera with shared mirror |
| AU2021453875A1 (en) * | 2021-06-28 | 2024-01-04 | nearmap australia pty ltd. | Hyper camera with shared mirror |
| WO2023281309A1 (en) * | 2021-07-08 | 2023-01-12 | Nearmap Australia Pty Ltd | Shaped-aperture scanning aerial cameras |
| RU2771488C1 (ru) * | 2021-07-13 | 2022-05-05 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Устройство управления размещенной на космическом корабле переносной аппаратурой наблюдения |
| CN113552136A (zh) * | 2021-07-30 | 2021-10-26 | 广州中国科学院先进技术研究所 | 一种具有隔振能力的高温锻件视觉检测系统 |
| WO2023149963A1 (en) | 2022-02-01 | 2023-08-10 | Landscan Llc | Systems and methods for multispectral landscape mapping |
| FR3137895A1 (fr) * | 2022-07-18 | 2024-01-19 | Airbus Operations | Ensemble pour aéronef comportant un châssis et un module de vision d’un système de vision en vol améliorée |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11234547A (ja) * | 1998-02-19 | 1999-08-27 | Remoto Sensing Technology Center Of Japan | 光学撮像装置 |
| US20120200703A1 (en) * | 2009-10-22 | 2012-08-09 | Bluebird Aero Systems Ltd. | Imaging system for uav |
| JP2016522768A (ja) * | 2013-03-15 | 2016-08-04 | トロ、インク. | 傾斜画像を対角線上に収集するための歪み修正センサ |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1797849A (en) | 1926-12-16 | 1931-03-24 | Firm Photogrammetrie G M B H | Multiple chamber for taking photographs from aeroplanes |
| US1735109A (en) | 1927-02-08 | 1929-11-12 | Leon T Eliel | Process of and apparatus for making aerial photographs |
| US2665481A (en) | 1951-03-02 | 1954-01-12 | James E Henry | Method of aerial mapping |
| US3212420A (en) | 1962-11-23 | 1965-10-19 | Dynasciences Corp | Image motion compensator |
| US3610825A (en) | 1969-06-04 | 1971-10-05 | Hughes Aircraft Co | Image control apparatus for a vision system |
| FR2696843B1 (fr) * | 1992-10-14 | 1994-12-09 | Matra Sep Imagerie Inf | Appareil de prise de vues à distance, à haute résolution, pour porteur aérien. |
| US5550669A (en) * | 1993-04-19 | 1996-08-27 | Martin Marietta Corporation | Flexure design for a fast steering scanning mirror |
| US5894323A (en) | 1996-03-22 | 1999-04-13 | Tasc, Inc, | Airborne imaging system using global positioning system (GPS) and inertial measurement unit (IMU) data |
| US6737591B1 (en) | 1999-05-25 | 2004-05-18 | Silverbrook Research Pty Ltd | Orientation sensing device |
| DE10034601B4 (de) | 2000-07-14 | 2013-05-23 | Leica Geosystems Ag | Kamerasystem mit mindestens zwei ersten und zweiten Kameras |
| US6366734B1 (en) * | 2000-08-31 | 2002-04-02 | Recon/Optical, Inc. | Method of forward motion compensation in an aerial reconnaissance camera |
| US7683937B1 (en) * | 2003-12-31 | 2010-03-23 | Aol Inc. | Presentation of a multimedia experience |
| US7597489B2 (en) | 2005-09-12 | 2009-10-06 | Honeywell International Inc. | Apparatus and method for providing pointing capability for a fixed camera |
| US20070188610A1 (en) | 2006-02-13 | 2007-08-16 | The Boeing Company | Synoptic broad-area remote-sensing via multiple telescopes |
| US8581981B2 (en) * | 2006-04-28 | 2013-11-12 | Southwest Research Institute | Optical imaging system for unmanned aerial vehicle |
| US9262818B2 (en) | 2007-05-01 | 2016-02-16 | Pictometry International Corp. | System for detecting image abnormalities |
| US8331615B2 (en) | 2007-08-01 | 2012-12-11 | The Board Of Trustees Of The University Of Illinois | Match, expand, and filter technique for multi-view stereopsis |
| JP4970296B2 (ja) | 2008-01-21 | 2012-07-04 | 株式会社パスコ | オルソフォト画像の生成方法、および撮影装置 |
| US8675068B2 (en) * | 2008-04-11 | 2014-03-18 | Nearmap Australia Pty Ltd | Systems and methods of capturing large area images in detail including cascaded cameras and/or calibration features |
| US8497905B2 (en) * | 2008-04-11 | 2013-07-30 | nearmap australia pty ltd. | Systems and methods of capturing large area images in detail including cascaded cameras and/or calibration features |
| US7899311B1 (en) | 2008-04-29 | 2011-03-01 | Optech International, Inc. | Removable shutter for a camera |
| US20100026822A1 (en) * | 2008-07-31 | 2010-02-04 | Itt Manufacturing Enterprises, Inc. | Multiplexing Imaging System for Area Coverage and Point Targets |
| IL207590A (en) | 2010-08-12 | 2016-11-30 | Rafael Advanced Defense Systems Ltd | A method and system for increasing the size of the area scanned at a given time by an airborne electro-optical photo system |
| ES2531299T3 (es) | 2011-02-10 | 2015-03-12 | Bae Systems Plc | Captura de imagen |
| US20120300079A1 (en) * | 2011-03-09 | 2012-11-29 | Richard Thomas Hale | Object-oriented cable camera system |
| CA2780419A1 (en) | 2011-06-17 | 2012-12-17 | National Cheng Kung University | Unmanned aerial vehicle image processing system and method |
| US9052571B1 (en) * | 2014-06-20 | 2015-06-09 | nearmap australia pty ltd. | Wide-area aerial camera systems |
| US9046759B1 (en) * | 2014-06-20 | 2015-06-02 | nearmap australia pty ltd. | Compact multi-resolution aerial camera system |
| US9185290B1 (en) * | 2014-06-20 | 2015-11-10 | Nearmap Australia Pty Ltd | Wide-area aerial camera systems |
-
2015
- 2015-06-10 US US14/735,504 patent/US9185290B1/en active Active
- 2015-06-19 CN CN201580037491.XA patent/CN106662804B/zh active Active
- 2015-06-19 CA CA2952933A patent/CA2952933C/en active Active
- 2015-06-19 AU AU2015243032A patent/AU2015243032B2/en active Active
- 2015-06-19 ES ES15810589T patent/ES2724464T3/es active Active
- 2015-06-19 JP JP2017518385A patent/JP6541779B2/ja active Active
- 2015-06-19 WO PCT/AU2015/050344 patent/WO2015192188A1/en active Application Filing
- 2015-06-19 EP EP15810589.0A patent/EP3158396B1/en active Active
- 2015-10-30 US US14/928,542 patent/US9462185B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11234547A (ja) * | 1998-02-19 | 1999-08-27 | Remoto Sensing Technology Center Of Japan | 光学撮像装置 |
| US20120200703A1 (en) * | 2009-10-22 | 2012-08-09 | Bluebird Aero Systems Ltd. | Imaging system for uav |
| JP2016522768A (ja) * | 2013-03-15 | 2016-08-04 | トロ、インク. | 傾斜画像を対角線上に収集するための歪み修正センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106662804B (zh) | 2019-04-23 |
| CN106662804A (zh) | 2017-05-10 |
| US9185290B1 (en) | 2015-11-10 |
| AU2015243032B2 (en) | 2017-09-21 |
| EP3158396B1 (en) | 2019-03-06 |
| US20160057345A1 (en) | 2016-02-25 |
| ES2724464T3 (es) | 2019-09-11 |
| US9462185B2 (en) | 2016-10-04 |
| EP3158396A1 (en) | 2017-04-26 |
| AU2015243032A1 (en) | 2016-01-21 |
| EP3158396A4 (en) | 2017-12-13 |
| JP6541779B2 (ja) | 2019-07-10 |
| CA2952933A1 (en) | 2015-12-23 |
| WO2015192188A1 (en) | 2015-12-23 |
| CA2952933C (en) | 2021-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6541779B2 (ja) | 高高度航空カメラシステム | |
| US9641736B2 (en) | Wide-area aerial camera systems | |
| US9440750B2 (en) | Wide-area aerial camera systems | |
| JP6410931B2 (ja) | 高高度航空カメラシステム | |
| US9188838B1 (en) | Compact multi-resolution aerial camera system | |
| US6747686B1 (en) | High aspect stereoscopic mode camera and method | |
| US20200191568A1 (en) | Multi-View Aerial Imaging | |
| US10848654B2 (en) | Oblique scanning aerial cameras | |
| US10846558B2 (en) | Multi-view scanning aerial cameras |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170411 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180402 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190422 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190604 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190611 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6541779 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |