[実施の形態]
以下、本発明の実施の形態を、図面を参照して説明する。
図1は、本実施の形態に係る車両用窓ガラス昇降装置の概略構成図である。
図1に示すように、車両用窓ガラス昇降装置1を搭載する車両のドア(車両用ドア)2は、窓ガラス3を格納する格納部21と、格納部21の上方に設けられた枠部22と、を有している。格納部21の車室内側には、格納部21を覆うようにドアトリム23が取り付けられている。
枠部22は、車両の前後方向における格納部21の後側の端部から上方に延びる後方立設部22aと、後方立設部22aよりも前側で格納部21から上方に延びる前方立設部22bと、後方立設部22aの上端部から前方立設部22bの上端部に至る上方延設部22cと、からなる。窓ガラス3の全閉時には、枠部22とドアトリム23の上端部とに囲まれた空間に、窓ガラス3が配置されることになる。つまり、枠部22とドアトリム23の上端部とが、窓枠25を構成している。本実施の形態では、窓枠25とは、ドア2及び窓ガラス3が閉まっている状態で窓ガラス3の外縁に接する部分をいう。
車両用窓ガラス昇降装置1は、窓ガラス3を駆動する駆動機構4と、駆動機構4を制御する制御部5と、を備えている。
駆動機構4は、窓枠25に対して窓ガラス3を上下方向に移動させるものであり、DCモータ等のモータ41と、モータ41の駆動力を窓ガラス3の上下方向の運動力に変換する動力変換機構42と、を備えている。動力変換機構42としては、例えば、窓ガラス3を支持しガイドレールに沿って摺動するキャリアプレートを備え、モータ41の駆動力によりワイヤをガイドレールに沿って摺動させることで、ワイヤに取り付けたキャリアプレートおよび窓ガラス3をガイドレールに沿って上下方向に移動させるウインドレギュレータ等を用いることができる。また、動力変換機構42としては、Xアーム式のレギュレータやその他の方式のものを用いることもできる。
ドア2には、窓ガラス3を昇降操作するためのスイッチ(SW)24が設けられている。スイッチ24の出力信号線は、制御部5に接続されている。スイッチ24は、例えば、2段階クリック式の揺動スイッチからなり、下降側となる一端側を1段階クリックした際には下降側第1段階クリック信号、下降側となる一端側を2段階クリックした際には下降側第2段階クリック信号、上昇側となる他端側を1段階クリックした際には上昇側第1段階クリック信号、上昇側となる他端側を2段階クリックした際には上昇側第2段階クリック信号を、制御部5に出力するように構成されている。
制御部5は、スイッチ24からの信号に応じて駆動機構4を制御し、窓ガラス3を上下方向に移動させるものである。制御部5は、CPU、メモリ、インターフェイス、ソフトウェア等を適宜組み合わせたコントロールユニットとしてドア2に搭載されている。なお、制御部5は、ドア2以外では例えば車両のミラーやシート等の制御を行う電子制御ユニット(ECU)に、機能として搭載されていてもよい。
制御部5は、スイッチ24から下降側第1段階クリック信号が入力された際には、当該信号が入力されている間窓ガラス3を下降し、下降側第2段階クリック信号が入力された際には、窓ガラス3が最下部まで下降されるか再びスイッチ24が操作されるまで窓ガラス3を自動的に下降するように駆動機構4を制御するように構成される。また、制御部5は、スイッチ24から上昇側第1段階クリック信号が入力された際には、当該信号が入力されている間窓ガラス3を上昇し、上昇側第2段階クリック信号が入力された際には、窓ガラス3が最上部まで上昇されるか再びスイッチ24が操作されるまで窓ガラス3を自動的に上昇するように駆動機構4を制御する。
以下、窓ガラス3による挟み込みを防止する構成について説明する。
車両用窓ガラス昇降装置1は、ドア2及び窓ガラス3が閉まっている状態において窓ガラス3の外縁の少なくとも一部に沿って窓ガラス3よりも車室内側に設けられた検出ライン6を撮像するカメラ7を備えている。本実施の形態では、このカメラ7で撮像した画像を基に、窓ガラス3による挟み込みのおそれがある異物が存在するのか否かを判断することになる。カメラ7の具体的な構成、および取付位置については、後述する。
検出ライン6は、窓ガラス3による挟み込みのおそれがある異物が存在するのか否かを判断する基準となるものであり、窓ガラス3よりも車室内側に設定されている。検出ライン6の具体的な構成、および設定位置については、後述する。
また、本実施の形態では、検出ライン6に向かって赤外光を照射する光源8をさらに備えている。カメラ7は、光源8から照射されて検出ライン6で反射した赤外光を撮像する赤外線カメラから構成される。光源8を備えることで、夜間および夜間以外の赤外線が届かない暗い場所、例えば地下駐車場等であっても、挟み込みのおそれがある異物を検出することが可能になる。光源8としては、近赤外光を照射するものを用いることができる。
制御部5は、カメラ7によって撮像された検出ライン6の少なくとも一部が異物によって遮蔽された遮蔽状態を検出する検出部51と、駆動機構4による窓ガラス3の移動時に検出部51によって遮蔽状態が検出されたとき、窓ガラス3による挟み込みを防止するための挟み込み防止動作を駆動機構4に行わせる挟み込み防止部52と、を有している。検出部51は、本発明の検出手段の一態様であり、挟み込み防止部52は、本発明の挟み込み防止手段の一態様である。
検出部51は、カメラ7で撮像した画像の画像処理を行い、検出ライン6を抽出する画像処理部51aと、画像処理部51aで画像処理を行った画像を基に、検出ライン6の少なくとも一部が異物によって遮蔽された遮蔽状態となっているかを判定する遮蔽判定部51bと、を備えている。
画像処理部51aにおける検出ライン6を抽出する具体的な方法については、特に限定するものではないが、例えば、カメラ7で撮像した画像をトリミングして不要部分を除き、ポスタリゼーション処理もしくは2値化処理もしくはエッジ検出処理を行うことで、周囲の部材と輝度の異なる検出ライン6を抽出することができる。
遮蔽判定部51bでは、例えば、予め遮蔽状態となっていない状態の画像(画像処理部51aによる画像処理後の画像)を初期状態画像として記憶しておき、当該初期状態画像と、画像処理部51aから出力された画像とを比較することで、検出ライン6が異物によって遮蔽されているか否かを判定するように構成される。遮蔽判定部51bは、例えば、初期状態画像と、画像処理部51aから出力された画像とを比較し、抽出した検出ライン6のエッジの差分や検出ライン6の面積の差分が予め設定した異物判定閾値を超えたとき、遮蔽状態であると判定するように構成される。
挟み込み防止部52は、駆動機構4による窓ガラス3の移動時に検出部51によって遮蔽状態が検出されたとき、窓ガラス3による挟み込みを防止するための挟み込み防止動作を駆動機構4に行わせる。挟み込み防止動作としては、窓ガラス3の移動を停止させる動作や、窓ガラス3を安全な位置まで下降させる動作や、車室内に設置した警報装置による音や光により操作者に警告を行う動作や、これらを組み合わせた動作が含まれる。
また、制御部5は、スイッチ24により窓ガラス3の移動が指示された後であって窓ガラス3の移動開始前に、検出部51によって遮蔽状態が検出されたとき、スイッチ24からの指示を無効とする指示無効部53をさらに備えている。指示無効部53を備えることによって、遮蔽状態が検出されている際にはそもそも窓ガラス3が移動しないことになるため、安全性をより高めることができる。
次に、カメラ7と検出ライン6の具体的な構成等について説明する。
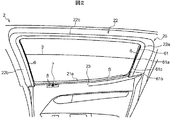
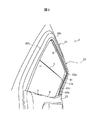
図2は、ドア2を車室側の上方から見た概略図、図3は、ドア2を車両の前方側の下方から見た概略図、図4(a)は、カメラ7を含む位置での断面図、図4(b)は図4(a)のカメラを設けた部分の拡大図である。
図2〜4に示すように、本実施の形態に係る車両用窓ガラス昇降装置1では、カメラ7は、少なくとも1つのレンズを含む光学系71と、光学系71によって被写体像が結像される撮像素子72と、を有しており、光学系71は、ドアトリム23の上面Sに形成された開口23aに対応する位置に、光学系71の光軸Cが開口23aを通るように配置されている。
つまり、本実施の形態では、カメラ7がドアトリム23の上面Sに設けられている。ここで、ドアトリム23の上面Sとは、ドアトリム23の上端部における外面のことであり、鉛直方向の上方から視認可能な面である。ドアトリム23の上面Sは、車幅方向(水平方向)に対して傾斜していてもよい。ドアトリム23は、一般に、その上面Sの位置が、窓ガラス3の近傍、すなわち格納部21から窓ガラス3が導出される導出口21aの近傍で最も高くなり、窓ガラス3から離れるほど低くなるように湾曲して形成されている。よって、ドアトリム23の上面Sとは、ドアトリム23における窓ガラス3(導出口21a)の近傍の部分における外面(窓枠25の下側の内周縁面に相当する部分)であるといえる。
開口23aは、導出口21aよりも車室内側に形成されており、カメラ7の光学系71は、導出口21aの車室内側に光軸Cが位置するように配置されている。ここでは、図4(a)の断面図において光学系71の光軸Cが鉛直方向と一致するようにカメラ7を配置しているが、光学系71の光軸Cは鉛直方向に対して車両の前後方向や車幅方向に傾斜していてもよく、カメラ7の取付位置や所望の撮像範囲に応じて適宜調整するとよい。
本実施の形態では、カメラ7は、ドアトリム23の上面Sにおける車両の前側の位置(窓ガラス3に面したドアトリム23の上面Sにおける前側の位置)に設けられた孔23bに配置されている。なお、ここでは、一例としてドアトリム23の上面Sにカメラ7を設ける場合を説明するが、カメラ7を設置する位置は、これに限定されるものではない。カメラ7を設置する位置の詳細については後述する。
カメラ7は、全体として円柱状に形成されており、その先端部には、径方向外方に突出するフランジ73が形成されている。カメラ7は、ドアトリム23の上方から孔23bに挿入され、フランジ73を孔23bの周縁に形成された凹部23cに収容し、かつ、孔23bの下方の周縁に設けられた係止爪23dをカメラ7に設けられた溝(図示せず)に係合することで、ドアトリム23に固定される。なお、ここでは、カメラ7の先端面とドアトリム23の上面Sとを一致させるように構成しているが、カメラ7の先端面は、ドアトリム23の上面Sから上方に突出していてもよいし、ドアトリム23の上面Sよりも下方に位置していてもよい。また、ここでは、光学系71の一部が開口23aの上方に位置するようにカメラ7を配置しているが、光学系71が開口23aの下方に位置するようにカメラ7を配置しても構わない。また、カメラ7をドアトリム23に固定する構造や、カメラ7の挿入方向については、特に限定するものではなく、適宜変更可能である。
カメラ7は、その撮像範囲(視野角)が、窓ガラス3の移動領域の全てをカバーするように構成されることが望ましい。具体的には、窓ガラス3が完全に格納される場合には、カメラ7は、その視野角が、車両の後方側においては、鉛直方向上方から後方立設部22aの下端部まで、車両の前方側においては、鉛直方向上方から前方立設部22bの下端部までの範囲をカバーするように設定されることが望ましい。また、窓ガラス3が完全に格納されない場合には、カメラ7は、その視野角が、鉛直方向上方から窓ガラス3を最下部に移動させた際の窓ガラス3の上端(上縁)と後方立設部22aの交差位置まで、車両の前方側においては、鉛直方向上方から窓ガラス3を最下部に移動させた際の窓ガラス3の上端(上縁)と前方立設部22bとの交差位置までの範囲をカバーするように設定されることが望ましい。
カメラ7の光学系71としては、上述の範囲での異物の検出を可能とすべく、広角レンズを用いることが望ましい。ここでは、光学系71として、複数のレンズを組み合わせ、視野角が車両の前後方向で180°以上、取付ばらつきを考慮して190°の超広角レンズを用いた。
また、撮像素子72としては、異物の検出を速やかに行うため、なるべく画像の読み出し速度が速いものを用いることが望ましい。本実施の形態では、撮像素子72として、CMOS(Complementary MOS)イメージセンサを用いた。
検出ライン6は、ドア2及び窓ガラス3が閉まっている状態において窓ガラス3の外縁の少なくとも一部に沿って形成されており、窓ガラス3よりも車室内側に設定されている。本実施の形態では、枠部22の全体に沿うように、かつ、窓ガラス3から車室内側に離間するように、検出ライン6を設定した。
検出ライン6は、窓枠25に沿うように設定されていればよく、ドア2側に設定されてもよいし、車体側に設定されてもよい。例えば、窓ガラス3から枠部22の車室内側の端部(端面)までの距離D(図4(a)参照)の狭い車両においては、検出ライン6と窓ガラス3との距離を確保するため、車体側に検出ライン6を設定してもよい。なお、検出ライン6は連続していなくてもよく、その一部がドア2側に設定され、その一部が車体側に設定されていてもよい。
本実施の形態では、一例として、検出ライン6をドア2側に設定する場合について説明する。この場合、検出ライン6は、枠部22全体の内周縁面、すなわち、後方立設部22aと前方立設部22bと上方延設部22cの全体の内周縁面に、窓ガラス3から車室内側に離間するように設定されることになる。なお、枠部22の内周縁面とは、枠部22の窓ガラス3に臨む面であり、後方立設部22aにおける車両の前方側の面、前方立設部22bにおける車両の後方側の面、上方延設部22cの下方側の面である。つまり、枠部22の内周縁面とは、枠部22の外周面のうち窓ガラス3の近傍の部分である。
光源8は、検出ライン6の全体を照射するように構成される。ここでは、4つの光源8を用いて、枠部22の全体の内周面に設定された検出ライン6に赤外線を照射するように構成したが、光源8の個数はこれに限定されるものではない。また、ここでは、カメラ7の近傍のドアトリム23の上面Sに光源8を配置したが、光源8の配置はこれに限定されず、例えば枠部22の内周面に光源8が配置されていてもよい。
検出ライン6は、赤外光を照射したときに周囲の部材と異なる輝度となるように構成される。例えば、ドア2を閉じたときにドア2を構成する金属(板金)と車体側のゴム部材(ウエスト)とが隣接する場合、それらの境界(すなわちドア2と車体の境界)を検出ライン6として用いることができる。また、枠部22の内周縁面が樹脂で構成されている場合には、当該樹脂の一部に凹凸を設けて赤外線の反射率が周囲と異なるラインを形成し、このラインを検出ライン6として用いることも可能である。なお、これに限らず、検出ライン6は、赤外線の反射率が高い塗料を枠部22の内周面に塗布して構成されてもよいし、赤外線を照射したときの輝度が周囲と異なる既存の部材から構成されてもよい。検出ライン6を車体側に設定する場合も同様である。
なお、本実施の形態においては、窓ガラス3の下降中においても、遮蔽状態が検出されたときには、挟み込み防止動作を行うように構成されている。これは、窓ガラス3を下降している際に指等の人体の一部が導出口21aに巻き込まれてしまうことを抑制するためである。導出口21aの周囲には、格納部21(ドア2の内部空間)への水等の侵入を抑止すべく、窓ガラス3に摺接するリップシール30aを有するウェザーストリップ30が設けられているが、窓ガラス3の下降時には、このリップシール30aを巻き込みつつ衣類や指等の人体の一部が格納部21側に巻き込まれてしまうおそれがある。本実施の形態によれば、このような巻き込みを抑制し、より安全性を高めることが可能である。なお、窓ガラス3の下降中に遮蔽状態が検出された際に実行される挟み込み防止動作には、窓ガラス3を下降させる動作は含まない。
以下、カメラ7の光学系71と検出ライン6との間で、異物が配置されたときに遮蔽状態となる位置を連続させた面を検出面9と呼称する。検出面9は、光学系71の具体的な構造にもよるが、光学系71の中心(車幅方向、高さ方向、および車両の前後方向における中心)と検出ライン6とを結ぶ面と略等しくなる。なお、検出面9はその全体が連続した面でなくてもよく、例えば検出ライン6が連続してない場合などには、検出面9は複数の面で構成されることになる。また、検出ライン6を点とした場合におけるカメラ7の光学系71と検出ライン6との間で異物が配置されたときに遮蔽状態となる位置を連続させた線も、検出面9に含まれる。検出面9を複数の面または線で構成する場合、安全性を確保するために、隣接する面または線の間隔は、少なくとも幼児の指の太さ(例えば4mm)以下とされることが望ましい。
次に、安全性確保領域と利便性向上領域について説明する。
図5に示すように、本実施の形態では、検出面9のうち、検出面9の上縁Uから鉛直方向下方に所定の長さの領域が安全性確保領域91に設定されると共に、検出面9のうち、車両の後方かつ下方の領域でかつ安全性確保領域91と重ならない領域が利便性向上領域92に設定されており、利便性向上領域92における検出面9と窓ガラス3の内面との車幅方向の距離d1が、少なくとも、安全性確保領域91における検出面9と窓ガラス3の内面との車幅方向の距離d2以下に設定されている。
なお、カメラ7の取付位置や検出ライン6の形状によっては、すなわち検出面9の形状によっては、距離d1,d2が一定でない場合も考えられるが、本実施の形態では、安全性確保領域91と利便性向上領域92のどの位置を比較しても、距離d1が距離d2以上となるように設定される。換言すれば、本実施の形態では、距離d1の最小値が、距離d2の最大値以上となるように検出面9が設定されている。
窓ガラス3による挟み込みは、窓枠25の締め切り端の近傍、すなわち、窓ガラス3の移動領域のうち上方の領域において発生し易い。よって、検出面9の上方の領域である安全性確保領域91において、窓ガラス3と検出面9との距離を十分に長くすることで、窓ガラス3による挟み込みが発生しやすい領域において、異物が窓ガラス3に接触する前に挟み込み防止動作を実行させることが可能になる。
また、窓ガラス3の移動領域のうち車両の後方かつ下方の領域では、搭乗者の肩など体の一部が窓ガラス3に近接し易く、この領域で窓ガラス3から離れた位置に検出面9を設定すると、利便性の低下につながってしまう。そこで、本実施の形態では、検出面9のうち車両の後方かつ下方の領域である利便性向上領域92を窓ガラス3に近接して設定することにより、利便性を向上している。
つまり、本実施の形態では、通常の使用の中で搭乗者の体の一部が窓ガラス3に近接しやすい窓ガラス3の移動領域のうち後方かつ下方の領域と車幅方向に対向する領域(利便性向上領域92)において、検出面9を窓ガラス3に近接して設定し、かつ、窓ガラス3による挟み込みが発生し易い窓ガラス3の移動領域のうち上方の領域と車幅方向に対向する領域(安全性確保領域91)において、検出面9を窓ガラス3から十分に離れた位置に設定している。これにより、利便性を確保しつつも、十分な安全性を確保することが可能になる。
なお、ここでは、安全性確保領域91と利便性向上領域92とが互いに接するように設定される場合を考慮して、距離d1を距離d2以上としているが、より好ましくは、距離d1を距離d2より長くすることが望ましいといえる。
本実施の形態では、利便性向上領域92においては、窓ガラス3と検出面9との距離が短くなるので、異物の検出後に挟み込み防止動作を行っても、当該異物が移動中の窓ガラス3に接触してしまうおそれがある。しかし、窓ガラス3の移動領域のうち下方の領域では、異物が移動中の窓ガラス3に接触してしまう可能性はあるものの、当該異物が窓ガラス3に接触した直後に挟み込み防止動作が実行されることになるため、当該異物が窓ガラス3と上方延設部22cとの間に挟み込まれてしまう可能性は小さいといえる。
ここで、想定される異物の侵入速度、カメラ7の読み出し速度、制御部5の演算速度(撮像してから異物侵入を判断するまでの時間)、および駆動機構4の窓ガラス3の移動を停止する速度(窓ガラス3を停止する時間)を考慮し、異物が侵入しても当該異物が窓ガラス3に接触する前に挟み込み防止動作を実行させることが可能な最短距離(窓ガラス3の内面からの車幅方向における距離)を、安全確保距離と呼称する。
安全性確保領域91における検出面9と窓ガラス3の内面との車幅方向の距離d1は、安全性確保領域91の全域において、安全確保距離以上となるように設定される。また、利便性向上領域92における検出面9と窓ガラス3の内面との車幅方向の距離d2は、利便性向上領域92の全域において、安全確保距離以下(好ましくは安全確保距離未満)となるように設定される。
例えば、カメラ7の読み出し速度を400fps(フレーム/秒、1フレーム2.5ms)とし、撮像してから異物侵入を判断する時間を10ms(明るさの補正処理等に最大7.5ms、異物の検出処理に2.5ms要すると仮定)とし、窓ガラス3を停止する時間を20msとした場合、撮像後30msで窓ガラス3が停止されることになる。この場合、異物の侵入速度を1m/sとすると、異物は30msの間に30mm移動することになるため、安全確保距離は30mmとなる。なお、ここでは異物の侵入速度を1m/sとしたが、例えば、高齢者の体の一部等の挟み込みを抑制するという観点から、異物の侵入速度を0.5m/sとした場合には、安全確保距離は14.5mmとなる。また、上記の場合においてカメラ7の読み出し速度が1000fps(1フレーム1ms)に向上した場合には、安全確保距離は24mmとなる。このように、安全確保距離は、要求される安全性や、使用する部材(カメラ7や駆動機構4等)の性能等に応じて変化する。
より高い安全性を確保する観点から、安全性確保領域91の検出面9の上縁からの長さ(安全性確保領域91の高さ)は、利便性が低下しない範囲でできるだけ大きくすることが望ましい。具体的には、実際の挟み込み事故の事例より、特に3歳児以下の小児の頭部が窓ガラス3に挟み込まれた場合に重大事故につながり易いので、3歳児の頭高の平均値が191mmであることを考慮し、安全性確保領域91の高さは、少なくとも200mm以上とされることが望ましい。
ここで、安全性確保領域91と利便性向上領域92を実現するための検出ライン6の形状について説明する。
本実施の形態では、ドア2及び窓ガラス3が閉まっている状態で車両の後方側の窓ガラス3の外縁に沿って設定された検出ライン6である後方側検出ライン61をクランク状に形成することで、安全性確保領域91と利便性向上領域92を実現している。
具体的には、後方側検出ライン61は、利便性向上領域92よりも上方に設定される第1後方側検出ライン61aと、少なくとも第1後方側検出ライン61aの下方に設定され第1後方側検出ライン61aよりも車幅方向において窓ガラス3に近接して設定された第2後方側検出ライン61bと、を有している。
第1後方側検出ライン61aと窓ガラス3との車幅方向における距離は、上述の安全確保距離以上の距離とされ、第2後方側検出ライン61bと窓ガラス3との車幅方向における距離は、安全確保距離未満とされる。
本実施の形態では、第1後方側検出ライン61aの下端部と第2後方側検出ライン61bの上端部とを鉛直方向における同じ高さ位置に設定し、両者を鉛直方向と垂直な直線状の補完用検出部61cにより接続することで、連続した後方側検出ライン61を形成している。なお、補完用検出部61cは、後方側検出ライン61の一部である。
ただし、第1後方側検出ライン61aの下端部と第2後方側検出ライン61bの上端部とを同じ高さ位置とすることは必須ではなく、例えば図6(a)に示すように、第1後方側検出ライン61aの下端部と第2後方側検出ライン61bの上端部とが鉛直方向に離間するように設定されていてもよい。また、図6(b)に示すように、第1後方側検出ライン61aの下端部と第2後方側検出ライン61bの上端部とが水平方向に重なり合うように(鉛直方向にオーバーラップするように)設定されていてもよい。
図6(a)のように第1後方側検出ライン61aの下端部と第2後方側検出ライン61bの上端部とが鉛直方向に離間するように設定されている場合、両後方側検出ライン61a,61b間に侵入した異物を検出するために、第1後方側検出ライン61aの下端部と第2後方側検出ライン61bの上端部との間に補完用検出部61cを設定することは必須となる。他方、図6(b)のように第1後方側検出ライン61aの下端部と第2後方側検出ライン61bの上端部とをオーバーラップして形成する場合には、そのオーバーラップ長Lを十分に長く設定することで、補完用検出部61cを省略することも可能である。
なお、両後方側検出ライン61a,61bがオーバーラップする部分の下方の領域では、異物が斜め下方から侵入する場合も考えられるので、このような異物が斜め下方から侵入可能な領域が安全性確保領域91にかからないように、両後方側検出ライン61a,61bを設定するとよい。
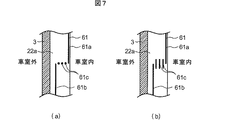
また、補完用検出部61cは、第1後方側検出ライン61aの下端部と第2後方側検出ライン61bの上端部とを接続する直線状に限定されず、例えば図7(a)に示すように、第1後方側検出ライン61aの下端部と第2後方側検出ライン61bの上端部との間に設定された1つ以上の点状に設定されてもよい。さらに、図7(b)に示すように、補完用検出部61cは、第1後方側検出ライン61aや第2後方側検出ライン61bに略平行な縦線状に形成されても構わない。この場合、例えばウエストとサッシュ間の境界の一部や、ドア2と車体との境界の一部、あるいはウエストなど各部材の突出部分の一部を補完用検出部61cとして用いることも可能である。
補完用検出部61cを点状あるいは縦線状に形成する場合、安全性を確保するために、補完用検出部61c同士の間隔、および補完用検出部61cと後方側検出ライン61a,61bとの間隔は、少なくとも幼児の指の太さ(例えば4mm)以下とされることが望ましい。なお、補完用検出部61cを縦線状に形成する場合には、その縦線の鉛直方向のオーバーラップ長を十分に長く設定することで、補完用検出部61c同士の間隔、および補完用検出部61cと後方側検出ライン61a,61bとの間隔を、幼児の指の太さ(例えば4mm)より大きしても、十分な安全性を確保することが可能である。
次に、安全性確保領域91と利便性向上領域92を実現するためのカメラ7の設置位置について説明する。
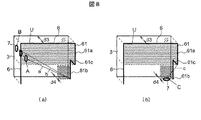
ここでは、一例として、第2後方側検出ライン61bと補完用検出部61cとを除く検出ライン6の窓ガラス3からの距離が上述の安全確保距離d3に設定されると共に、第2後方側検出ライン61bの窓ガラス3からの距離が、利便性を確保可能な最大距離d4に設定されているとする。ここで、利便性を確保可能な最大距離d4とは、通常の使用の中で利便性が確保可能な最大距離であり、ドア2の形状やシート位置等を考慮して設定される。安全性確保領域91では、全域で検出面9と窓ガラス3との車幅方向の距離が安全確保距離d3以上となっている必要があり、利便性向上領域92においては、全域で検出面9と窓ガラス3との車幅方向の距離が利便性を確保可能な最大距離d4以下となっている必要がある。
図8(a)に示すように、まず、安全性確保領域91の下端部よりも上方、すなわち安全性確保領域91と車幅方向に重なる位置にカメラ7を設置する場合を検討する。この場合、窓ガラス3からの車幅方向の距離が安全確保距離d3以上となる位置Aにカメラ7を設置すると、カメラ7と第2後方側検出ライン61bの下端部とを結ぶ線分aを考慮すれば、車両の後方かつ下方の領域において検出面9と窓ガラス3との距離が利便性を確保可能な最大距離d4よりも長くなってしまうことが分かる。よって、この場合、安全性確保領域91は実現できるものの、利便性向上領域92を実現することはできない。
また、安全性確保領域91の下端部よりも上方にカメラ7を設置する場合において、窓ガラス3からの車幅方向の距離が安全確保距離d3未満の位置Bにカメラ7を設置すると、カメラ7と第2後方側検出ライン61bの下端部とを結ぶ線分bを考慮すれば、上方の領域に形成される検出面9の距離が安全確保距離d3以下となることが分かる。よって、この場合、利便性向上領域92を実現できたとしても、安全性確保領域91を実現することはできない。
なお、図8(a)では、一例として前側の窓枠25(前方立設部22b)の内周縁面にカメラ7を設ける場合を示しているが、安全性確保領域91の下端部よりも上方の位置であれば、どの位置にカメラ7を設置しても同様の結果となる。したがって、カメラ7は、安全性確保領域91よりも下方に設置されることが望ましいといえる。
図8(b)に示すように、次に、利便性向上領域92の前側の端部よりも後方で、かつ利便性向上領域92の上端部よりも下方の位置、すなわち利便性向上領域92と車幅方向に重なる位置にカメラ7を設置する場合について検討する。この場合、窓ガラス3からの車幅方向の距離が利便性を確保可能な最大距離d4以上となる位置Cにカメラ7を設置すると、カメラ7と第1後方側検出ライン61aの下端部とを結ぶ線分cを考慮すれば、車両の後方かつ下方の領域において検出面9と窓ガラス3との距離が利便性を確保可能な最大距離d4よりも長くなってしまうことが分かる。よって、この場合、安全性確保領域91が実現できたとしても、利便性向上領域92を実現することはできない。なお、利便性を確保すべく第2後方側検出ライン61bは窓ガラス3に近接して設定されるため、第2後方側検出ライン61bよりも窓ガラス3側の位置にカメラ7を設置することは現実的ではない。よって、カメラ7は、利便性向上領域92よりも前方か、あるいは、利便性向上領域92よりも上方に設置されることが望ましいといえる。
以上の検証結果より、カメラ7を設ける開口23aを窓枠25の内周縁面に形成する場合、この開口23aは、少なくとも、窓枠25の前側(前方立設部22b)における安全性確保領域91よりも下方の位置、又は、窓枠25後側(後方立設部22a)における安全性確保領域91よりも下方でかつ利便性向上領域92よりも上方の位置、又は、窓枠25の下側(ドアトリム23の上面S)における利便性向上領域92よりも車両の前側の位置のいずれかに形成される必要があるといえる。
さらに、ドア2の形状や両領域91,92の形状、距離d3,d4の設定値等を考慮し、上述の位置のうち両領域91,92を実現可能な適切な位置に、カメラ7を設置するとよい。
図示の例では、窓枠25の前側(前方立設部22b)においては、安全性確保領域91よりも下方で、かつ、窓ガラス3からの車幅方向の距離が利便性を確保可能な最大距離d4以下であり、かつ、カメラ7(光学系71の中心)と第1後方側検出ライン61aの下端部とを結ぶ線分が、設定する利便性向上領域92と車幅方向に重なる領域を横切らない位置に、カメラ7を設ける必要がある。また、窓枠25の後側(後方立設部22a)においては、安全性確保領域91よりも下方でかつ利便性向上領域92よりも上方であり、かつ、窓ガラス3からの車幅方向における距離が利便性を確保可能な最大距離d4以下となる位置に、カメラ7を設ける必要がある。さらに、窓枠25の下側(ドアトリム23の上面S)においては、利便性向上領域92よりも車両の前側であり、かつ、窓ガラス3からの車幅方向における距離が利便性を確保可能な最大距離d4以下であり、かつ、カメラ7(光学系71の中心)と第1後方側検出ライン61aの下端部とを結ぶ線分が、設定する利便性向上領域92と車幅方向に重なる領域を横切らない位置に、カメラ7を設ける必要がある。なお、利便性向上領域92を広く設定する場合には、下側の窓枠25(ドアトリム23の上面S)にはカメラ7を設置できない場合も考えられる。
なお、本実施の形態では、検出面9のうち車両の後方かつ下方の領域を利便性向上領域92に設定したが、検出面9の下方の領域全体を利便性向上領域92に設定してもよい。また、安全性確保領域91や利便性向上領域92の形状は図示のものに限定されず、適宜設定可能である。
次に、車両用窓ガラス昇降装置1の制御フローについて説明する。
図9に示すように、車両用窓ガラス昇降装置1では、まず、ステップS1にて、制御部5が、スイッチ24から信号が入力されたかを判断する。ステップS1にてNOと判断された場合、ステップS2にて、制御部5が、カメラ7の電源をオフ(または電源オフの状態を継続)して、ステップS1に戻る。なお、図示していないが、光源8の電源がオンとなっている場合には、ステップS2にて光源8の電源をオフにする。
ステップS1にてYESと判断された場合、ステップS3にて、制御部5が、カメラ7の電源をオン(または電源オンの状態を継続)し、ステップS4に進む。ここでは図示を省略しているが、カメラ7で撮像するための照度が不足している場合には、ステップS3にて光源8の電源をオンにする。
ステップS4では、検出部51(画像処理部51aおよび遮蔽状態判定部51b)が、カメラ7で撮像した画像を基に、遮蔽状態を検出する処理(遮蔽状態検出処理)を行う。その後、ステップS5にて、指示無効部53が、検出部51により遮蔽状態が検出されたかを判断する。
ステップS5でYESと判断された場合、指示無効部53は、窓ガラス3による挟み込みのおそれがあると判断し、窓ガラス3の移動を行わずに(すなわちスイッチ24からの信号を無効として)ステップS1に戻る。
ステップS5にてNOと判断された場合、ステップS6にて、制御部5が、スイッチ24から入力された信号が、第1段階クリック信号(下降側第1段階クリック信号または上昇側第1段階クリック信号)であるかを判断する。
ステップS6でYESと判断された場合、ステップS7にて、制御部5が、駆動機構4を制御して、窓ガラス3の移動制御を行う。
その後、ステップS8にて、検出部51が、カメラ7で撮像した画像を基に、遮蔽状態を検出する処理(遮蔽状態検出処理)を行う。その後、ステップS9にて、挟み込み防止部52が、検出部51により遮蔽状態が検出されたかを判断する。
ステップS9でYESと判断された場合、窓ガラス3による挟み込みのおそれがあるため、ステップS10にて、挟み込み防止部52が、窓ガラス3の移動を停止させる、あるいは、窓ガラス3を安全な位置まで下降させる等の挟み込み防止動作を実行する。その後、ステップS18にて制御部5が窓ガラス3の移動を終了した後に、ステップS2に戻る。このように、本実施の形態では、スイッチ24から第1段階クリック信号の入力中に遮蔽状態が検出された場合には、挟み込み防止動作を行った後に窓ガラス3の移動を終了する。
ステップS9でNOと判断された場合、窓ガラス3による挟み込みのおそれはないので、ステップS11にて、制御部5が、スイッチ24から信号が入力されているかを判断する。ステップS11でNOと判断された場合、スイッチ24の操作が終了したことになるので、ステップS18にて制御部5が窓ガラス3の移動を終了した後に、ステップS2に戻る。ステップS11でYESと判断された場合、ステップS6に戻り、窓ガラス3の移動を継続する。
他方、ステップS6でNOと判断された場合、すなわち、スイッチ24から第2段階クリック信号(下降側第2段階クリック信号または上昇側第2段階クリック信号)が入力された場合、ステップS12にて、制御部5が、駆動機構4を制御して、窓ガラス3の移動制御を行う。
その後、ステップS13にて、検出部51が、カメラ7で撮像した画像を基に、遮蔽状態を検出する処理(遮蔽状態検出処理)を行う。その後、ステップS14にて、挟み込み防止部52が、検出部51により遮蔽状態が検出されたかを判断する。
ステップS14でYESと判断された場合、窓ガラス3による挟み込みのおそれがあるため、ステップS15にて、挟み込み防止部52が挟み込み防止動作を実行する。その後、ステップS18にて窓ガラス3の移動を終了した後に、ステップS2に戻る。つまり、本実施の形態では、スイッチ24から第2段階クリック信号が入力され窓ガラス3を移動させている際に遮蔽状態が検出された場合には、挟み込み防止動作を行った後に窓ガラス3の移動を終了する。
ステップS14でNOと判断された場合、窓ガラス3による挟み込みのおそれはないので、ステップS16にて、制御部5が、窓ガラス3が端まで(上端または下端の位置まで)移動されたかを判断する。ステップS16でYESと判断された場合、ステップS18にて、制御部5が窓ガラス3の移動を終了した後に、ステップS2に戻る。なお、窓ガラス3の位置情報は、モータ41の内部に組み込んだホールICを用いて生成した回転パルス、または電流リップルを用いて取得するとよい。
ステップS16でNOと判断された場合、ステップS17にて、スイッチ24から新たな信号が入力されたか(第2段階クリック信号の入力後に新たな信号が入力されたか)を判断する。ステップS17でYESと判断された場合、ステップS6に戻る。ステップS17でNOと判断された場合、ステップS12に戻り、窓ガラス3の移動を継続する。つまり、第2段階クリック信号が入力された場合、遮蔽状態が検出されるか、窓ガラス3が端まで移動するか、あるいは新たな信号がスイッチ24から入力されるまで、窓ガラス3の移動を継続する。
(実施の形態の作用及び効果)
以上説明したように、本実施の形態に係る車両用窓ガラス昇降装置1では、検出面9のうち、検出面9の上縁から鉛直方向下方に所定の長さの領域が安全性確保領域91に設定されると共に、検出面9のうち、車両の後方かつ下方の領域でかつ安全性確保領域91と重ならない領域が利便性向上領域92に設定され、利便性向上領域92における検出面9と窓ガラス3の内面との車幅方向の距離d2が、少なくとも、安全性確保領域91における検出面9と窓ガラス3の内面との車幅方向の距離d1以下とされている。
このように構成することで、窓ガラス3による挟み込みの発生しやすい上方の領域においては窓ガラス3と検出面9との距離を長くし、異物が接触する前に挟み込み防止動作を実行させることが可能になる。また、通常の使用の中で搭乗者の体の一部等が窓ガラス3に近接しやすい車両の後方かつ下方の領域においては窓ガラス3と検出面9との距離を短くし、窓ガラス3による挟み込みのおそれがないにもかかわらず挟み込み防止動作が行われ、窓ガラス3を動かしたいときに動かせない、といった不具合を抑制し、利便性を向上することが可能になる。その結果、例えば車格の小さいコンパクトカー等のドアトリム23が薄い車両であっても、安全性と利便性を両立することが可能になる。
(実施の形態のまとめ)
次に、以上説明した実施の形態から把握される技術思想について、実施の形態における符号等を援用して記載する。ただし、以下の記載における各符号等は、特許請求の範囲における構成要素を実施の形態に具体的に示した部材等に限定するものではない。
[1]車両のドア(2)に配置され窓ガラス(3)を上下方向に移動させる駆動機構(4)と、前記駆動機構(4)を制御する制御部(5)と、前記ドア(2)及び前記窓ガラス(3)が閉まっている状態において前記窓ガラス(3)の外縁の少なくとも一部に沿って前記窓ガラス(3)よりも車室内側に設けられた検出ライン(6)を撮像するカメラ(7)と、を備え、前記制御部(5)は、前記カメラ(7)によって撮像された前記検出ライン(6)の少なくとも一部が異物によって遮蔽された遮蔽状態を検出する検出手段(51)と、前記駆動機構(4)による前記窓ガラス(3)の移動時に前記検出手段(51)によって前記遮蔽状態が検出されたとき、前記窓ガラス(3)による挟み込みを防止するための挟み込み防止動作を前記駆動機構(4)に行わせる挟み込み防止手段(52)とを有し、前記カメラ(7)と前記検出ライン(6)との間で、前記異物が配置されたときに前記遮蔽状態となる位置を連続させた面である検出面(9)のうち、前記検出面(9)の上縁から鉛直方向下方に所定の長さの領域が安全性確保領域(91)に設定されると共に、前記検出面(9)のうち、前記車両の後方かつ下方の領域でかつ前記安全性確保領域(91)と重ならない領域が利便性向上領域(92)に設定され、前記利便性向上領域(92)における前記検出面(9)と前記窓ガラス(3)の内面との車幅方向の距離が、少なくとも、前記安全性確保領域(91)における前記検出面(9)と前記窓ガラス(3)の内面との車幅方向の距離以下である、車両用窓ガラス昇降装置(1)。
[2]前記検出ライン(6)は、前記ドア(2)及び前記窓ガラス(3)が閉まっている状態で車両の後方側の前記窓ガラス(3)の外縁に沿って設定された後方側検出ライン(61)を有し、前記後方側検出ライン(61)は、前記利便性向上領域(92)よりも上方に設定される第1後方側検出ライン(61a)と、少なくとも該第1後方側検出ライン(61a)の下方に設定され前記第1後方側検出ライン(61a)よりも車幅方向において前記窓ガラス(3)に近接して設定された第2後方側検出ライン(61b)と、を有する、[1]に記載の車両用窓ガラス昇降装置(1)。
[3]前記後方側検出ライン(61)は、前記第1後方側検出ライン(61a)の下端部と前記第2後方側検出ライン(61b)の上端部との間に設定された少なくとも1つの点状または線状の補完用検出部(61c)をさらに有する、[2]に記載の車両用窓ガラス昇降装置(1)。
[4]前記後方側検出ライン(61)は、前記第1後方側検出ライン(61a)の下端部と前記第2後方側検出ライン(61b)の上端部とが水平方向に重なり合うように配置される、[2]又は[3]に記載の車両用窓ガラス昇降装置(1)。
[5]前記車両は、前記ドア(2)及び前記窓ガラス(3)が閉まっている状態で前記窓ガラス(3)の外縁に接する窓枠(25)を有し、前記カメラ(7)は、少なくとも1つのレンズを含む光学系(71)と、前記光学系(71)によって被写体像が結像される撮像素子(72)とを有し、前記光学系(71)は、前記窓枠(25)の前記窓ガラス(3)よりも車室内側の内周縁面に形成された開口(23a)に対応する位置に、前記光学系(71)の光軸が前記開口(23a)を通るように配置され、前記開口(23a)は、前記車両の前側の前記窓枠(25)の前記安全性確保領域(91)よりも下方の位置、又は、前記車両の後側の前記窓枠(25)の前記安全性確保領域(91)よりも下方でかつ前記利便性向上領域(92)よりも上方の位置、又は、下側の前記窓枠(25)の前記利便性向上領域(92)よりも前記車両の前側の位置に形成される、[1]乃至[4]の何れかに記載の車両用窓ガラス昇降装置(1)。
[6]前記安全性確保領域(91)の前記検出面(9)の上縁からの長さが200mm以上である、[5]に記載の車両用窓ガラス昇降装置(1)。
[7][1]乃至[6]の何れかに記載の車両用窓ガラス昇降装置(1)を備えた車両。
以上、本発明の実施の形態を説明したが、上記に記載した実施の形態は特許請求の範囲に係る発明を限定するものではない。また、実施の形態の中で説明した特徴の組合せの全てが発明の課題を解決するための手段に必須であるとは限らない点に留意すべきである。
本発明は、その趣旨を逸脱しない範囲で適宜変形して実施することが可能である。例えば、上記実施の形態では、後方側検出ライン61が、第1後方側検出ライン61aと第2後方側検出ライン61bとを有する場合について説明したが、例えば、第2後方側検出ライン61bの下方に、第2後方側検出ライン61bよりも車幅方向において窓ガラス3に近接して設定された第3後方側検出ラインをさらに備え、下方の領域における検出面9をさらに窓ガラス3に近づけてより利便性をより向上させるように構成してもよい。換言すれば、後方側検出ライン61は3つ以上に分割して設定されていてもよい。
また、上記実施の形態では言及しなかったが、車両用窓ガラス昇降装置1には、モータ41の回転数を監視し、窓ガラス3の上昇中に負荷が増加しモータ41の回転数が減少したときに、窓ガラスによる異物の挟み込みが発生したと判定し、窓ガラス3の移動方向を反転させ自動で下降させる等の各種安全動作を行わせる安全装置が備えられてもよい。
また、上記実施の形態では、車両の後側のドア2に適用する場合について説明したが、これに限定されるものではなく、本発明は車両の前側のドアにも適用可能である。
さらに、上記実施の形態では、枠部22を有するドア2に適用する場合を説明したが、本発明は、ドア2側に枠部22を有さないハードトップドアにも適用可能である。