JP2017194021A - 給水装置 - Google Patents
給水装置 Download PDFInfo
- Publication number
- JP2017194021A JP2017194021A JP2016085067A JP2016085067A JP2017194021A JP 2017194021 A JP2017194021 A JP 2017194021A JP 2016085067 A JP2016085067 A JP 2016085067A JP 2016085067 A JP2016085067 A JP 2016085067A JP 2017194021 A JP2017194021 A JP 2017194021A
- Authority
- JP
- Japan
- Prior art keywords
- baffle
- self
- water
- control unit
- water supply
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 title claims abstract description 172
- 239000007788 liquid Substances 0.000 claims abstract description 52
- 239000012530 fluid Substances 0.000 claims abstract description 36
- 230000007246 mechanism Effects 0.000 claims abstract description 34
- 238000000926 separation method Methods 0.000 claims description 44
- 238000005086 pumping Methods 0.000 claims description 41
- 230000008859 change Effects 0.000 claims description 19
- 238000001514 detection method Methods 0.000 claims description 3
- 230000003247 decreasing effect Effects 0.000 abstract 1
- 235000014676 Phragmites communis Nutrition 0.000 description 9
- 238000007599 discharging Methods 0.000 description 8
- 238000011144 upstream manufacturing Methods 0.000 description 6
- 230000007423 decrease Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000037452 priming Effects 0.000 description 4
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- XECAHXYUAAWDEL-UHFFFAOYSA-N acrylonitrile butadiene styrene Chemical compound C=CC=C.C=CC#N.C=CC1=CC=CC=C1 XECAHXYUAAWDEL-UHFFFAOYSA-N 0.000 description 2
- 229920000122 acrylonitrile butadiene styrene Polymers 0.000 description 2
- 239000004676 acrylonitrile butadiene styrene Substances 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000005022 packaging material Substances 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 235000020681 well water Nutrition 0.000 description 2
- 239000002349 well water Substances 0.000 description 2
- 238000009835 boiling Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- 239000004417 polycarbonate Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
Images



Landscapes
- Structures Of Non-Positive Displacement Pumps (AREA)
- Control Of Non-Positive-Displacement Pumps (AREA)
Abstract
Description
本発明の好ましい態様は、前記初期位置にあるバッフルを下から支えるストッパをさらに有することを特徴とする。
本発明の好ましい態様は、前記バッフルに固定された錘をさらに有することを特徴とする。
本発明の好ましい態様は、前記気液分離室内の流体の圧力値を測定する圧力センサをさらに備え、前記制御部は、前記圧力値が前記制御部に予め記憶された所定の圧力しきい値以上である場合に、前記アクチュエータを動作させて、前記バッフルを前記初期位置から前記待避位置に回動させることを特徴とする。
本発明の好ましい態様は、前記制御部は、前記モータの電流値を検出する電流検出部を有しており、前記制御部は、前記電流値が前記制御部に予め記憶された所定の電流しきい値以上である場合に、前記アクチュエータを動作させて、前記バッフルを前記初期位置から前記待避位置に回動させることを特徴とする。
本発明の好ましい態様は、前記ポンプケーシングの温度値を測定する温度センサをさらに備え、前記制御部は、前記温度値の変化率が前記制御部に予め記憶された所定の変化率しきい値よりも小さい場合に、前記アクチュエータを動作させて、前記バッフルを前記初期位置から前記待避位置に回動させることを特徴とする。
図1は、一実施形態に係る給水装置が配置された給水システムの一例を示す模式図である。図1に示される給水システム50は、地上に配置された給水装置1と、給水装置1から井戸まで延びる吸込管32と、給水装置1から建物35まで延びる吐出管36とを有する。吸込管32の末端は、井戸の水位よりも下方に位置しており、吐出管36には、建物35の内部に配置された給水器具37(例えば、蛇口)が接続される。さらに、吸込管32の末端には、井戸水内に浮遊する砂などの異物が給水装置1まで運ばれることを防止するストレーナ33が取り付けられている。給水装置1によって、井戸水を給水器具37に供給することができる。
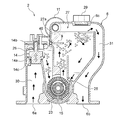
2 自吸式ポンプ
3 モータ
6 ポンプケーシング
7 制御部
9 バッフル
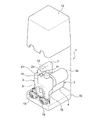
10 ベース
11 圧力センサ
12 カバー
13 インバータ
14 逆止弁(フローチェッキ)
15 羽根車
18 吸込口
19 吐出口
20 磁石
21 リードスイッチ
23 羽根車室
26 吸込室
27 気液分離室
28 環流孔
29 キャップ
30 吸込流路
31 吐出流路
32 吸込管
33 ストレーナ
34 圧力タンク
35 建物
36 吐出管
37 給水器具
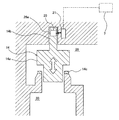
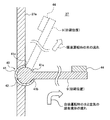
40 回動機構
41 軸受
42 回動軸
43 ストッパ
44 錘
47 アクチュエータ
50 給水システム
55 電流検出部
57 温度センサ
Claims (8)
- 自吸式ポンプと、前記自吸式ポンプを駆動するモータと、前記自吸式ポンプの運転を制御する制御部と、を備えた給水装置であって、
前記自吸式ポンプは、
羽根車と、
前記羽根車を収容する羽根車室、および前記羽根車室の下流側に位置する気液分離室を有するポンプケーシングと、
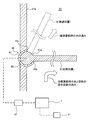
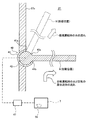
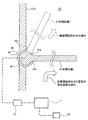
前記気液分離室に設けられ、前記羽根車室から吐出された流体が衝突するバッフルと、
前記バッフルを、自吸運転時には、水と空気の混合流体が衝突する初期位置に維持し、揚液運転時には、該バッフルに衝突する水の流れを逸らす待避位置に回動させる回動機構と、を有することを特徴とする給水装置。 - 前記回動機構は、
前記気液分離室の壁に設けられた軸受と、
前記バッフルの端部に設けられ、前記軸受に嵌め込まれる回動軸と、を有することを特徴とする請求項1に記載の給水装置。 - 前記初期位置にあるバッフルを下から支えるストッパをさらに有することを特徴とする請求項2に記載の給水装置。
- 前記バッフルに固定された錘をさらに有することを特徴とする請求項3に記載の給水装置。
- 前記回動機構は、
前記制御部に接続され、該制御部からの指令に基づいて前記バッフルを回動させるアクチュエータをさらに備えたことを特徴とする請求項2に記載の給水装置。 - 前記気液分離室内の流体の圧力値を測定する圧力センサをさらに備え、
前記制御部は、前記圧力値が前記制御部に予め記憶された所定の圧力しきい値以上である場合に、前記アクチュエータを動作させて、前記バッフルを前記初期位置から前記待避位置に回動させることを特徴とする請求項5に記載の給水装置。 - 前記制御部は、前記モータの電流値を検出する電流検出部を有しており、
前記制御部は、前記電流値が前記制御部に予め記憶された所定の電流しきい値以上である場合に、前記アクチュエータを動作させて、前記バッフルを前記初期位置から前記待避位置に回動させることを特徴とする請求項5に記載の給水装置。 - 前記ポンプケーシングの温度値を測定する温度センサをさらに備え、
前記制御部は、前記温度値の変化率が前記制御部に予め記憶された所定の変化率しきい値よりも小さい場合に、前記アクチュエータを動作させて、前記バッフルを前記初期位置から前記待避位置に回動させることを特徴とする請求項5に記載の給水装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016085067A JP6754604B2 (ja) | 2016-04-21 | 2016-04-21 | 給水装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016085067A JP6754604B2 (ja) | 2016-04-21 | 2016-04-21 | 給水装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017194021A true JP2017194021A (ja) | 2017-10-26 |
| JP6754604B2 JP6754604B2 (ja) | 2020-09-16 |
Family
ID=60155322
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016085067A Active JP6754604B2 (ja) | 2016-04-21 | 2016-04-21 | 給水装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6754604B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117386631A (zh) * | 2023-11-22 | 2024-01-12 | 济南宏林天怡实业有限公司 | 一种具有智能化自动检测功能的消防泵 |
-
2016
- 2016-04-21 JP JP2016085067A patent/JP6754604B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117386631A (zh) * | 2023-11-22 | 2024-01-12 | 济南宏林天怡实业有限公司 | 一种具有智能化自动检测功能的消防泵 |
| CN117386631B (zh) * | 2023-11-22 | 2024-03-08 | 济南宏林天怡实业有限公司 | 一种具有智能化自动检测功能的消防泵 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6754604B2 (ja) | 2020-09-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5274524B2 (ja) | ポンプ機場 | |
| JP2017194021A (ja) | 給水装置 | |
| JP6158106B2 (ja) | ポンプ装置 | |
| JP6462518B2 (ja) | 水中電動ポンプ | |
| KR101861970B1 (ko) | 진공강자흡식펌프 | |
| JP2007040155A (ja) | 自吸式ポンプ | |
| JP4824335B2 (ja) | 先行待機型立軸ポンプ | |
| JP4273254B2 (ja) | 起動時吐出性能を改善した浸漬式ポンプ | |
| KR200445591Y1 (ko) | 수분 분리구조를 갖는 진공 자흡식 원심펌프 | |
| JP2015143476A (ja) | ポンプ装置 | |
| KR101997575B1 (ko) | 양흡입 자흡수식 펌프 | |
| KR101407652B1 (ko) | 흡입조건 개선 및 효율을 증대시키는 부양가이드를 구비한 펌프 | |
| JP2005248901A (ja) | 自吸式ポンプ及び自吸式ポンプ装置 | |
| JP2007239598A (ja) | 自吸ポンプ | |
| JP6374998B2 (ja) | 自吸式ポンプの運転装置、液体供給装置、及び自吸式ポンプの運転方法 | |
| JP6747855B2 (ja) | 給水装置 | |
| JP2019086004A (ja) | 自吸式ポンプの運転装置、液体供給装置、及び自吸式ポンプの運転方法 | |
| TWI698590B (zh) | 再生式泵 | |
| JP3116943B2 (ja) | 自吸式ポンプ | |
| JP4949641B2 (ja) | 小型の水中ポンプにおける揚水調整機構 | |
| JP2018066380A (ja) | 自吸式ポンプの運転装置、液体供給装置、及び自吸式ポンプの運転方法 | |
| JP6082977B2 (ja) | 自吸式ポンプ | |
| JP5601511B2 (ja) | 入浴装置 | |
| JP2008057399A (ja) | 非容積形ポンプ | |
| JP5293104B2 (ja) | 自吸式ポンプ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190416 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200128 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200324 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200513 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200811 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200824 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6754604 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |