JP2017187471A - 撮像装置 - Google Patents
撮像装置 Download PDFInfo
- Publication number
- JP2017187471A JP2017187471A JP2017013192A JP2017013192A JP2017187471A JP 2017187471 A JP2017187471 A JP 2017187471A JP 2017013192 A JP2017013192 A JP 2017013192A JP 2017013192 A JP2017013192 A JP 2017013192A JP 2017187471 A JP2017187471 A JP 2017187471A
- Authority
- JP
- Japan
- Prior art keywords
- light
- time
- light source
- signal charge
- image sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 131
- 238000012545 processing Methods 0.000 claims description 40
- 238000009825 accumulation Methods 0.000 claims description 37
- 230000003287 optical effect Effects 0.000 claims description 26
- 238000009826 distribution Methods 0.000 abstract description 9
- 239000012491 analyte Substances 0.000 abstract 1
- 238000009792 diffusion process Methods 0.000 description 145
- 239000010410 layer Substances 0.000 description 145
- 238000010586 diagram Methods 0.000 description 45
- 210000003128 head Anatomy 0.000 description 43
- 238000000034 method Methods 0.000 description 36
- 102000001554 Hemoglobins Human genes 0.000 description 33
- 108010054147 Hemoglobins Proteins 0.000 description 33
- 210000001061 forehead Anatomy 0.000 description 30
- 230000003727 cerebral blood flow Effects 0.000 description 20
- 238000005259 measurement Methods 0.000 description 18
- 230000017531 blood circulation Effects 0.000 description 13
- 230000008859 change Effects 0.000 description 13
- 210000004556 brain Anatomy 0.000 description 12
- 238000001514 detection method Methods 0.000 description 12
- 210000004761 scalp Anatomy 0.000 description 12
- 238000000926 separation method Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 9
- 230000007177 brain activity Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 7
- 238000004458 analytical method Methods 0.000 description 5
- 210000003710 cerebral cortex Anatomy 0.000 description 5
- 230000031700 light absorption Effects 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000010521 absorption reaction Methods 0.000 description 3
- 230000003044 adaptive effect Effects 0.000 description 3
- 230000002238 attenuated effect Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 230000003925 brain function Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 230000003111 delayed effect Effects 0.000 description 3
- 238000007599 discharging Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 238000004088 simulation Methods 0.000 description 3
- 238000011410 subtraction method Methods 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 101000694017 Homo sapiens Sodium channel protein type 5 subunit alpha Proteins 0.000 description 2
- 230000003321 amplification Effects 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 230000008034 disappearance Effects 0.000 description 2
- 210000004884 grey matter Anatomy 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 230000003252 repetitive effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000008326 skin blood flow Effects 0.000 description 2
- 230000003595 spectral effect Effects 0.000 description 2
- 238000002834 transmittance Methods 0.000 description 2
- 238000000149 argon plasma sintering Methods 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 210000001175 cerebrospinal fluid Anatomy 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000004186 food analysis Methods 0.000 description 1
- 238000012880 independent component analysis Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000001320 near-infrared absorption spectroscopy Methods 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 210000003625 skull Anatomy 0.000 description 1
- 239000002344 surface layer Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000002366 time-of-flight method Methods 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 210000004885 white matter Anatomy 0.000 description 1
Images




























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
- H04N25/53—Control of the integration time
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0062—Arrangements for scanning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0062—Arrangements for scanning
- A61B5/0064—Body surface scanning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0077—Devices for viewing the surface of the body, e.g. camera, magnifying lens
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/026—Measuring blood flow
- A61B5/0261—Measuring blood flow using optical means, e.g. infrared light
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/1455—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue using optical sensors, e.g. spectral photometrical oximeters
- A61B5/14551—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue using optical sensors, e.g. spectral photometrical oximeters for measuring blood gases
- A61B5/14553—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue using optical sensors, e.g. spectral photometrical oximeters for measuring blood gases specially adapted for cerebral tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/40—Detecting, measuring or recording for evaluating the nervous system
- A61B5/4058—Detecting, measuring or recording for evaluating the nervous system for evaluating the central nervous system
- A61B5/4064—Evaluating the brain
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/01—Arrangements or apparatus for facilitating the optical investigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
- G01S17/18—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves wherein range gates are used
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/56—Cameras or camera modules comprising electronic image sensors; Control thereof provided with illuminating means
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
- H04N23/663—Remote control of cameras or camera parts, e.g. by remote control devices for controlling interchangeable camera parts based on electronic image sensor signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/73—Circuitry for compensating brightness variation in the scene by influencing the exposure time
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/74—Circuitry for compensating brightness variation in the scene by influencing the scene brightness using illuminating means
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/75—Circuitry for compensating brightness variation in the scene by influencing optical camera components
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/71—Charge-coupled device [CCD] sensors; Charge-transfer registers specially adapted for CCD sensors
- H04N25/75—Circuitry for providing, modifying or processing image signals from the pixel array
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
- H04N25/77—Pixel circuitry, e.g. memories, A/D converters, pixel amplifiers, shared circuits or shared components
- H04N25/771—Pixel circuitry, e.g. memories, A/D converters, pixel amplifiers, shared circuits or shared components comprising storage means other than floating diffusion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7203—Signal processing specially adapted for physiological signals or for diagnostic purposes for noise prevention, reduction or removal
Abstract
Description
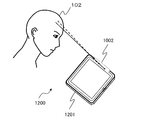
本実施形態1の撮像装置1001は被検体として生体等の光散乱体を対象とする。具体的には、撮像装置1001は、観測すべき脳内の酸素化ヘモグロビン、脱酸素化ヘモグロビンの濃度分布とその時間変化を検出し、前記濃度分布を2D画像として構築する。本撮像装置1001は非接触でありながらアーチファクトである頭皮血流の除去軽減を高速かつ高精度に実行する。
次に、本開示の実施形態2について説明する。本実施の形態による撮像装置は被検体として生体等の光散乱体を対象とする。具体的には、撮像装置は、観測すべき脳内の酸素化ヘモグロビン、脱酸素化ヘモグロビンの濃度分布とその時間変化を検出し、前記濃度分布を2D画像として構築する。
次に、本開示の実施形態3について説明する。実施形態2にかかる撮像装置1002と比較すると、本実施形態にかかる撮像装置は、1発光パルスの反射光を2位相に分割して光電変換する機能を備える点で相違する。ハードウェアとしての構成は実施形態2と同じであるので、本実施形態では図12を参照する。
次に、本開示の実施形態4について説明する。本実施の形態による撮像装置は被検体として生体等の光散乱体を対象とする。具体的には、撮像装置は、観測すべき脳内の酸素化ヘモグロビン、脱酸素化ヘモグロビンの濃度分布とその時間変化を検出し、前記濃度分布を2D画像として構築する。
103、104、105、106 第1の光源
107、108、109、110 第2の光源
111 結像光学系
112 光学ダブルバンドパスフィルター
113 時間分解イメージセンサ
114 制御回路
115 第1信号処理回路
116 第2信号処理回路
600 光源
602 イメージセンサ
604 信号処理回路
606 表面反射成分
608 内部散乱成分
Claims (11)
- 第1のパルス光を発光して被写体の所定の領域内に第1のパターンの第1の像を投影し、かつ第2のパルス光を発光して前記被写体の前記所定の領域内の、前記第1の像の位置と異なる位置に第2のパターンの第2の像を投影する第1の光源と、
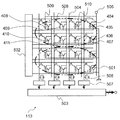
複数の画素を含み、前記複数の画素の各々は、受けた光を信号電荷に変換する光検出器と、前記信号電荷を蓄積する第1の蓄積部および第2の蓄積部とを含む、イメージセンサと、
前記第1の光源および前記イメージセンサを制御する制御回路と
を備え、 前記制御回路は、
前記第1の光源に前記第1のパルス光を発光させ、
前記第1のパルス光の発光に対応して前記光検出器で生じた第1の信号電荷を前記第1の蓄積部に蓄積させ、
前記第1の光源に前記第2のパルス光を前記第1のパルス光の発光と異なる時刻に発光させ、
前記第2のパルス光の発光に対応して前記光検出器で生じた第2の信号電荷を前記第2の蓄積部に蓄積させる、
撮像装置。 - 前記第1の信号電荷および前記第2の信号電荷に基づいて画像情報を生成する信号処理回路をさらに備える、
請求項1に記載の撮像装置。 - 前記第1パターン及び前記第2のパターンは、複数の点を含むパターンである、
請求項1または2に記載の撮像装置。 - 前記第1パターン及び前記第2のパターンは、複数のリングを含むパターンである、
請求項1または2に記載の撮像装置。 - 前記第1パターン及び前記第2のパターンは、複数の直線を含むパターンである、
請求項1または2に記載の撮像装置。 - 前記制御回路は、
前記第1の光源に、複数の第1のパルス光を発光させ、前記複数の第1のパルス光の各々は前記第1のパルス光であり、
前記第1の光源に、複数の第2のパルス光を発光させ、前記複数の第1のパルス光の各々は前記第1のパルス光である、
請求項1から5のいずれかに記載の撮像装置。 - 第3のパルス光を発光して前記被写体の前記所定の領域内の、前記第1および第2の像の位置と異なる位置に第3のパターンの第3の像を投影し、かつ第4のパルス光を発光して前記被写体の前記所定の領域内の、前記第1、第2および第3の像の位置と異なる位置に第4のパターンの像を投影する第2の光源をさらに備え、
前記イメージセンサにおける前記複数の画素の各々は、前記信号電荷を蓄積する第3の蓄積部および第4の蓄積部をさらに含み、
前記第1の光源は第1の波長範囲の光を発光し、
前記第2の光源は前記第1の波長範囲と異なる第2の波長範囲の光を発光し、
前記制御回路は前記第2の光源をさらに制御し、
前記制御回路は、
前記第2の光源に前記第3のパルス光を発光させ、
前記第3のパルス光の発光に対応して前記光検出器で生じた第3の信号電荷を前記第3の蓄積部に蓄積させ、
前記第2の光源に前記第4のパルス光を前記第3のパルス光の発光と異なる時刻に発光させ、
前記第4のパルス光の発光に対応して前記光検出器で生じた第4の信号電荷を前記第4の蓄積部に蓄積させる、
請求項1から6のいずれかに記載の撮像装置。 - 前記第1から第4の信号電荷に基づいて画像情報を生成する信号処理回路をさらに備える、
請求項7に記載の撮像装置。 - 前記被写体は光学的散乱体であり、
前記第1の信号電荷は、前記被写体から到達した、前記第1のパルス光に由来する内部散乱光成分であり、
前記第2の信号電荷は、前記被写体から到達した、前記第2のパルス光に由来する内部散乱光成分である、
請求項1から6のいずれかに記載の撮像装置。 - 前記イメージセンサにおける前記複数の画素の各々は、前記信号電荷を蓄積する第3の蓄積部および第4の蓄積部をさらに含み、
前記制御回路は、
第1の時刻および第2の時刻のそれぞれにおいて前記第1のパルス光を発光させ、
前記第1の時刻から第1の時間が経過した後から、前記第1の蓄積部に前記第1の信号電荷を蓄積させ、
前記第2の時刻から前記第1の時間よりも長い第2の時間が経過した後から、前記第3の蓄積部に前記第1の信号電荷を蓄積させ、
第3の時刻および第4の時刻のそれぞれにおいて前記第2のパルス光を発光させ、
前記第3の時刻から第3の時間が経過した後から、前記第2の蓄積部に前記第2の信号電荷を蓄積させ、
前記第4の時刻から前記第3の時間よりも長い第4の時間が経過した後から、前記第4の蓄積部に前記第2の信号電荷を蓄積させる、
請求項1に記載の撮像装置。 - 第1のパルス光を発光して被写体の所定の領域に所定パターンの像を投影する光源と、
複数の画素を含み、前記複数の画素の各々は、受けた光を信号電荷に変換する光検出器と、前記信号電荷を蓄積する第1の蓄積部および第2の蓄積部とを含むイメージセンサと、
前記光源および前記イメージセンサを制御する制御回路と
を備え、
前記制御回路は、
第1の時刻において前記光源に前記第1のパルス光を発光させ、
前記第1の時刻の後で、かつ第2の時刻までは、前記第1の蓄積部に前記信号電荷を蓄積させ、
前記第2の時刻を超えてからは前記第2の蓄積部に前記信号電荷を蓄積させる、
撮像装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016072346 | 2016-03-31 | ||
| JP2016072346 | 2016-03-31 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017187471A true JP2017187471A (ja) | 2017-10-12 |
Family
ID=59959941
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017013192A Pending JP2017187471A (ja) | 2016-03-31 | 2017-01-27 | 撮像装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10200637B2 (ja) |
| JP (1) | JP2017187471A (ja) |
| CN (1) | CN107277303B (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017124153A (ja) * | 2016-01-07 | 2017-07-20 | パナソニックIpマネジメント株式会社 | 生体情報計測装置 |
| WO2019082686A1 (ja) * | 2017-10-27 | 2019-05-02 | ソニーセミコンダクタソリューションズ株式会社 | 撮像装置 |
| CN112188867A (zh) * | 2018-12-20 | 2021-01-05 | 松下知识产权经营株式会社 | 生物体计测装置、生物体计测方法、计算机可读取的记录介质及程序 |
| US11372200B2 (en) | 2017-10-27 | 2022-06-28 | Sony Semiconductor Solutions Corporation | Imaging device |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6500849B2 (ja) * | 2016-06-23 | 2019-04-17 | カシオ計算機株式会社 | 撮像装置、撮像方法及びプログラム |
| EP3480571B1 (de) * | 2017-10-10 | 2023-04-05 | PÖTTINGER Landtechnik GmbH | Vorrichtung zum optischen erkennen von objekten |
| WO2019230306A1 (ja) * | 2018-05-30 | 2019-12-05 | パナソニックIpマネジメント株式会社 | 識別装置および識別方法 |
| WO2020122628A1 (ko) * | 2018-12-13 | 2020-06-18 | 엘지이노텍 주식회사 | 카메라 장치 |
| CN112270693B (zh) * | 2020-11-11 | 2022-10-11 | 杭州蓝芯科技有限公司 | 一种飞行时间深度相机运动伪差检测方法和装置 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005283472A (ja) * | 2004-03-30 | 2005-10-13 | Topcon Corp | 光画像計測装置 |
| JP2006314557A (ja) * | 2005-05-12 | 2006-11-24 | Olympus Medical Systems Corp | 生体観測装置 |
| JP2007260123A (ja) * | 2006-03-28 | 2007-10-11 | Olympus Medical Systems Corp | 撮像システムおよび撮像方法 |
| JP2009008537A (ja) * | 2007-06-28 | 2009-01-15 | Fujifilm Corp | 距離画像装置及び撮像装置 |
| JP2010098260A (ja) * | 2008-10-20 | 2010-04-30 | Honda Motor Co Ltd | 発光装置、受光システム及び撮像システム |
| JP2010194291A (ja) * | 2009-01-30 | 2010-09-09 | Fujifilm Corp | 内視鏡装置及びその駆動方法 |
| JP2011013138A (ja) * | 2009-07-03 | 2011-01-20 | Toyota Central R&D Labs Inc | 画像センサとその画像センサに用いられる受光装置 |
| JP2012125370A (ja) * | 2010-12-15 | 2012-07-05 | Hitachi Ltd | 生体計測装置 |
| WO2012143977A1 (ja) * | 2011-04-22 | 2012-10-26 | 株式会社日立製作所 | 血管画像撮影装置及び生体認証装置 |
| US20130148326A1 (en) * | 2011-12-13 | 2013-06-13 | Welch Allyn, Inc. | Method and apparatus for observing subsurfaces of a target material |
| JP2013224838A (ja) * | 2012-04-20 | 2013-10-31 | Seiko Epson Corp | 成分濃度測定装置及び成分濃度測定方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06261107A (ja) | 1993-03-04 | 1994-09-16 | Matsushita Electric Ind Co Ltd | 携帯無線電話装置 |
| JP3954300B2 (ja) | 2000-11-24 | 2007-08-08 | ペンタックス株式会社 | 3次元画像検出装置 |
| JP5744557B2 (ja) | 2011-02-10 | 2015-07-08 | キヤノン株式会社 | 音響波取得装置 |
| JP5741186B2 (ja) | 2011-04-26 | 2015-07-01 | 富士通株式会社 | 欠陥検査装置及び欠陥検査方法 |
| JP5623348B2 (ja) * | 2011-07-06 | 2014-11-12 | 富士フイルム株式会社 | 内視鏡システム、内視鏡システムのプロセッサ装置、及び内視鏡システムの作動方法 |
| US9807322B2 (en) * | 2013-03-15 | 2017-10-31 | Duelight Llc | Systems and methods for a digital image sensor |
| JP6245863B2 (ja) | 2013-07-01 | 2017-12-13 | キヤノン株式会社 | 被検体情報取得装置、被検体情報取得装置の制御方法 |
| KR20160023441A (ko) * | 2014-08-22 | 2016-03-03 | 서울바이오시스 주식회사 | 발광소자가 구비된 카메라와, 이를 이용한 피부 촬영 방법 및 피부 상태 측정 방법 |
| US20180070830A1 (en) * | 2015-04-09 | 2018-03-15 | The General Hospital Corporation | Systems and methods for time-resolved diffuse correlation spectroscopy |
| KR101716663B1 (ko) * | 2015-12-09 | 2017-03-15 | (주)아이에스엠아이엔씨 | 무채혈 혈당 측정 보정 방법 및 장치 |
-
2017
- 2017-01-27 JP JP2017013192A patent/JP2017187471A/ja active Pending
- 2017-03-07 CN CN201710130213.XA patent/CN107277303B/zh active Active
- 2017-03-15 US US15/459,021 patent/US10200637B2/en active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005283472A (ja) * | 2004-03-30 | 2005-10-13 | Topcon Corp | 光画像計測装置 |
| JP2006314557A (ja) * | 2005-05-12 | 2006-11-24 | Olympus Medical Systems Corp | 生体観測装置 |
| JP2007260123A (ja) * | 2006-03-28 | 2007-10-11 | Olympus Medical Systems Corp | 撮像システムおよび撮像方法 |
| JP2009008537A (ja) * | 2007-06-28 | 2009-01-15 | Fujifilm Corp | 距離画像装置及び撮像装置 |
| JP2010098260A (ja) * | 2008-10-20 | 2010-04-30 | Honda Motor Co Ltd | 発光装置、受光システム及び撮像システム |
| JP2010194291A (ja) * | 2009-01-30 | 2010-09-09 | Fujifilm Corp | 内視鏡装置及びその駆動方法 |
| JP2011013138A (ja) * | 2009-07-03 | 2011-01-20 | Toyota Central R&D Labs Inc | 画像センサとその画像センサに用いられる受光装置 |
| JP2012125370A (ja) * | 2010-12-15 | 2012-07-05 | Hitachi Ltd | 生体計測装置 |
| WO2012143977A1 (ja) * | 2011-04-22 | 2012-10-26 | 株式会社日立製作所 | 血管画像撮影装置及び生体認証装置 |
| US20130148326A1 (en) * | 2011-12-13 | 2013-06-13 | Welch Allyn, Inc. | Method and apparatus for observing subsurfaces of a target material |
| JP2013224838A (ja) * | 2012-04-20 | 2013-10-31 | Seiko Epson Corp | 成分濃度測定装置及び成分濃度測定方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017124153A (ja) * | 2016-01-07 | 2017-07-20 | パナソニックIpマネジメント株式会社 | 生体情報計測装置 |
| WO2019082686A1 (ja) * | 2017-10-27 | 2019-05-02 | ソニーセミコンダクタソリューションズ株式会社 | 撮像装置 |
| US11372200B2 (en) | 2017-10-27 | 2022-06-28 | Sony Semiconductor Solutions Corporation | Imaging device |
| CN112188867A (zh) * | 2018-12-20 | 2021-01-05 | 松下知识产权经营株式会社 | 生物体计测装置、生物体计测方法、计算机可读取的记录介质及程序 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170289468A1 (en) | 2017-10-05 |
| CN107277303A (zh) | 2017-10-20 |
| US10200637B2 (en) | 2019-02-05 |
| CN107277303B (zh) | 2021-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11303828B2 (en) | Imaging apparatus including light source that emits pulsed light, image sensor, and control circuit | |
| JP2017187471A (ja) | 撮像装置 | |
| JP7065421B2 (ja) | 撮像装置および対象物の内部の情報を取得する方法 | |
| US10352853B2 (en) | Measuring device including light source that emits at least one light pulse group, photodetector, and control circuit | |
| US10397496B2 (en) | Imaging device provided with light source, image sensor including first accumulator and second accumulator, and controller | |
| JPWO2020121705A1 (ja) | 撮像装置 | |
| CN108926340B (zh) | 计测装置 | |
| US10257397B2 (en) | Imaging apparatus including light source, photodetector, and control circuit | |
| US20190014994A1 (en) | Measuring device including light source that emits light pulse groups, photodetector, and control circuit | |
| CN110891481B (zh) | 生物体计测装置及头戴式显示器装置 | |
| CN112236084A (zh) | 光计测装置 | |
| US20230301536A1 (en) | Biological measurement device, biological measurement method, and non-transitory computer-readable recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200722 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201014 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210316 |