JP2017124153A - 生体情報計測装置 - Google Patents
生体情報計測装置 Download PDFInfo
- Publication number
- JP2017124153A JP2017124153A JP2016207065A JP2016207065A JP2017124153A JP 2017124153 A JP2017124153 A JP 2017124153A JP 2016207065 A JP2016207065 A JP 2016207065A JP 2016207065 A JP2016207065 A JP 2016207065A JP 2017124153 A JP2017124153 A JP 2017124153A
- Authority
- JP
- Japan
- Prior art keywords
- biological information
- light
- control circuit
- distance
- subject
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/1455—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue using optical sensors, e.g. spectral photometrical oximeters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
Abstract
Description
[項目1]
被検者の被検部に照射するための照射光を出射する光源と、
前記被検者からの光を検出し、前記光に対応する電気信号を出力する光検出器と、
前記光源が出射する前記照射光のパワーを決定し、かつ前記電気信号に基づいて前記被検部における血流に関する生体情報を計測する制御回路とを備え、
前記制御回路は、前記電気信号に基づいて、前記光源と前記被検部との距離を検出し、かつ前記距離が長いほど前記照射光の前記パワーが大きくなるように前記照射光の前記パワーを決定する生体情報計測装置。
[項目2]
前記制御回路は、さらに、第1時刻における前記距離である第1距離と、前記第1時刻より後の第2時刻における前記距離である第2距離とを比較し、前記比較の結果、前記距離が変動したと判定した場合、前記照射光の前記パワーを再度決定する、
請求項1に記載の生体情報計測装置。
[項目3]
前記光検出器は、複数のフレームを含む、前記被検部の動画を取得するイメージセンサであり、
前記制御回路は、所定枚数のフレーム毎に、前記第1距離と前記第2距離との前記比較を行う、
請求項2に記載の生体情報計測装置。
[項目4]
前記制御回路は、さらに、前記生体情報の前記計測が正常か否かを判定し、かつ前記計測が正常に行えなくなったことを検出した場合、前記第1距離と前記第2距離との前記比較を行う、
請求項2に記載の生体情報計測装置。
[項目5]
前記光検出器は、前記被検部の画像を取得するイメージセンサであり、
前記電気信号は、前記画像を示す信号を含み、
前記制御回路は、前記画像を示す前記信号に基づいて、第1時刻における前記被検部の輝度である第1輝度と、前記第1時刻より後の第2時刻における前記被検部の輝度である第2輝度と、前記第1輝度と前記第2輝度との差である輝度変動量を検出し、かつ前記輝度変動量に応じて、前記照射光の前記パワーを調整する、
請求項1に記載の生体情報計測装置。
[項目6]
前記画像が、複数のフレームを含む動画であり、
前記制御回路は、所定枚数のフレーム毎に、前記輝度変動量を検出する、
請求項5に記載の生体情報計測装置。
[項目7]
前記制御回路は、さらに、前記生体情報の前記計測が正常か否かを判定し、かつ前記計測が正常に行えなくなったことを検出した場合、前記輝度変動量を検出する、
請求項5に記載の生体情報計測装置。
[項目8]
前記制御回路は、さらに、第1時刻における前記距離である第1距離と、前記第1時刻より後の第2時刻における前記距離である第2距離との差である距離変動量を検出し、かつ前記距離変動量に応じて、前記照射光の前記パワーを調整する、
請求項1に記載の生体情報計測装置。
[項目9]
前記画像が、複数のフレームを含む動画であり、
前記制御回路は、所定枚数のフレーム毎に、前記距離変動量を検出する、
請求項8に記載の生体情報計測装置。
[項目10]
前記制御回路は、さらに、前記生体情報の前記計測が正常か否かを判定し、かつ前記計測が正常に行えなくなったことを検出した場合、前記距離変動量を検出する、
請求項8に記載の生体情報計測装置。
[項目11]
前記制御回路は、さらに、前記電気信号に基づいて、前記被検部の位置を検出し、前記位置に基づいて、前記被検者において前記照射光が照射される位置を決定する、
請求項1に記載の生体情報計測装置。
[項目12]
前記光検出器は、前記被検部の画像を取得するイメージセンサであり、
前記電気信号は、前記画像を示す信号を含み、
前記制御回路は、前記画像を示す前記信号に基づく画像認識によって前記被検部の位置を検出する、
請求項11に記載の生体情報計測装置。
[項目13]
前記生体情報計測装置は、第1光検出器及び第2光検出器を備え、
前記第1光検出器及び前記第2光検出器の各々は、前記光検出器であり、
前記第2光検出器はイメージセンサであり、
前記第1光検出器は、前記被検者からの前記光のうち、前記照射光に含まれる波長の成分を検出し、前記波長の前記成分に対応する第1電気信号を出力し、
前記第2光検出器は、前記被検者からの前記光のうち、可視光の成分を検出し、前記可視光の前記成分に対応する第2電気信号を出力し、
前記制御回路は、前記第2電気信号に基づいて、前記距離を検出し、前記第1電気信号に基づいて、前記生体情報を計測する、
請求項1に記載の生体情報計測装置。
[項目14]
前記照射光はパルス光であり、
前記制御回路は、前記光源が前記パルス光を出射してから前記光検出器が前記パルス光を検出するまでの時間に基づいて前記距離を検出する、
請求項1に記載の生体情報計測装置。
[項目15]
前記照射光の経路上に配置され、前記被検者において前記照射光が照射される前記位置を変更する光学素子をさらに備え、
前記制御回路は、前記電気信号に基づいて前記光学素子を制御する、
請求項11に記載の生体情報計測装置。
[項目16]
前記被検部は前記被検者の額であり、
前記生体情報は脳血流に関する情報である、
請求項1に記載の生体情報計測装置。
[項目17]
前記光検出器から出力された前記電気信号を外部機器に送信する
インタフェースをさらに備える、
請求項1に記載の生体情報計測装置。
[項目18]
被検者の被検部に照射するための照射光を出射する光源と、
前記被検者からの光を検出し、前記光に対応する第1電気信号を出力する光検出器と、
前記光源が出射する前記照射光のパワーを決定し、かつ前記第1電気信号に基づいて前記被検部における血流に関する生体情報を計測する制御回路と、
前記被検部の画像を取得し、前記画像を示す信号を含む第2電気信号を出力するイメージセンサを備える外部機器と通信するためのインタフェースとを備え、
前記インタフェースは、前記外部機器から前記第2電気信号を受信し、かつ前記外部機器に前記第1電気信号を送信し、
前記制御回路は、前記第2電気信号に基づいて、前記光源と前記被検部との距離を検出し、かつ前記距離が長いほど前記照射光の前記パワーが大きくなるように前記照射光の前記パワーを決定する生体情報計測装置。
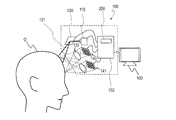
まず、実施形態1における生体情報計測装置を説明する。生体情報計測装置は、被検者の被検部における脳血流を非接触で計測する。
(1)光源110の発光中に光検出器140から出力された電気信号(例えば画像を示す信号)に基づいて、被検部の位置、および被検部までの距離を特定する。
(2)特定した被検部の位置および距離に基づいて、被検者Oにおいて光が照射される位置および光のパワーを決定する。例えば、被検部の位置に光が正しく照射されるように、不図示のMEMSミラーなどの光学素子を制御する。そして、光検出器140に到達する光のパワーがほぼ規定値になるように光源110を発光させる。例えば、被検部までの距離が大きいほど光源110が発する光のパワーを高くし、当該距離が小さいほど光源110が発する光のパワーを低くする。
図1Bは、本実施形態における生体情報計測装置100のより詳細な構成例を示す図である。この例における生体情報計測装置100は、前述した光源110、光検出器140、制御回路200に加えて、光源110から出射された光の経路を変更する光学素子120と、被検者Oからの光を集光する光学系130と、光検出器140から出力された信号を処理し、光源110および光学素子120を制御する処理装置150とを備えている。制御回路200は処理装置150の内部に設けられている。図1Bには、生体情報計測装置100の外部の要素であるディスプレイ(表示装置)160も示されている。ディスプレイ160は、処理装置200に接続され、処理結果を表示する。
図4は、制御回路200の典型的な機能ブロックを模式的に示す図である。制御回路200は、検出部210と、光源制御部220と、計測部230と、推定部240とを有する。制御回路200は、例えばASIC(Application Specific Integrated Circuit)、またはFPGA(Field−Programmable Gate Array)のような集積回路である。各機能ブロックに対応する機能は、ソフトウェアおよびハードウェアのいずれによっても制御回路200に実装され得る。例えば制御回路200の内部ROM(不図示)またはROM152に格納されたコンピュータプログラムは、各機能ブロックに対応した機能を実行するための命令群を含んでいてもよい。制御回路200は単体で市場に流通し得る製品である。
制御回路200の検出部210は、被検者Oの額の位置および光源110と額との間の距離を検出する。具体的には、検出部210は、光検出器140から出力され、複数のフレーム画像から構成された動画像を利用して、フレーム画像中の額の位置情報を画像認識によって取得する。例えば、人の額に関連付けられたテンプレートを用いたパターンマッチングによって額の位置が特定される。位置情報とは、例えば、検出されたパターンにおける画像中の中心の位置を示す情報などであり得る。テンプレートは、例えばROM152に予め格納されている。画像認識には、公知の手法を広く用いることができ、特定の方法に限定されない。また、検出部210は、光検出器140から出力された光のパワーの位相差を示す情報を含む信号に基づいて被検者Oまでの距離を計算(測距)する。
光源制御部220は、検出部210からの初期情報に基づいて光の出射方向およびパワーの初期値を設定する。具体的には、光の出射方向の初期値は光学素子120に設定される。光学素子120は、例えばMEMSミラーの角度を初期値に応じた角度に設定し、額における光121の照射位置を決定する。光パワーの初期値は光源110に設定される。光源110は、初期値に応じたパワーを有する光121を被検者0に出射する。以上の動作により、生体情報計測装置100に対面する被検者Oの位置に関わらず、その位置に応じた適切な方向に適切なパワーで光を出射させることができる。
制御回路200の計測部230は、光検出器140からの出力信号に基づいて被検者Oの生体情報を計測する。例えば計測部230はNIRSを利用して、脳内の血液中の酸化ヘモグロビン濃度および還元ヘモグロビン濃度を生体情報として計測する。制御回路200の推定部240は、計測した生体情報に基づいて被検者の心理状態を推定する。例えば、推定部240は、ヘモグロビンの酸素状態から、被検者Oの集中度、感情などの心理状態を推定する。
酸素飽和度=C(HbO2)/[C(HbO2)+C(Hb)]×100(%)
上述したように、例えば被検者Oがある課題を解いて学習しているとする。その際、被検者Oの頭部、つまり、計測中に被検部である額が動くことが想定される。そこで、検出部210は、初期動作を行った後、被検者(特に頭部)が動いたかどうかを監視する。例えば、検出部210は、連続したフレーム画像間で動きベクトルを算出する。検出部210は、その動きベクトルの大きさが閾値以上である場合、被検者Oは動いたと判定し、動きベクトルの大きさが閾値未満である場合、被検者Oは動かなかったと判定する。例えば、その閾値は予めROM152に格納されている。
検出部210は、被検者Oの額の位置および光源110と額との間の距離を再度検出して、位置および距離に関する更新情報を生成する。
光源制御部220は、検出部210からの更新情報に基づいて光の出射方向および光パワーを調整する。具体的には、光の出射方向の更新値が光学素子120に設定され、光パワーの更新値は光源110に設定される。光学素子120は、MEMSミラーの角度を更新値に応じた角度に変更し、額における光121の照射位置を変更する。光源110は、更新値が示す光パワー値に光パワーを変更する。光源ユニット170の設定が更新されると、処理は再びステップS502に戻る。
続いて、本実施形態の変形例を説明する。
PWV=D/ΔT 式(1)
次に、実施形態2における生体情報計測モジュールを説明する。本実施形態における生体情報計測モジュールは、例えばタブレット端末、スマートフォン、またはノートPC(ラップトップ)などの汎用の携帯電子機器に外付けして使用されるアタッチメントである。以下、実施形態1による生体情報計測装置100と異なる点を中心に説明し、共通する部分の説明は省略する。
次に、本開示の技術を適用した学習システムの実施形態を説明する。
次に、実施形態4における対話型ロボットを説明する。
図15は、実施形態5による車両600の車内を模式的に示している。
図16は、実施形態6による環境制御装置700の外観を模式的に示している。
実施形態7に係る生体情報計測装置について、実施形態1の生体情報計測装置100と異なる点を中心に説明する。
実施形態8に係る生体情報計測装置について、実施形態1の生体情報計測装置100と異なる点を中心に説明する。
110 光源
120 光学素子
130 光学系
140 光検出器
150 装置本体
180 CPU
152 ROM
153 RAM
160 表示装置
170 光源ユニット
180、200、510 制御回路
250 出力I/F
300 生体情報計測モジュール
400 電子機器
500 ロボット
600 車両
700 環境制御装置
Claims (18)
- 被検者の被検部に照射するための照射光を出射する光源と、
前記被検者からの光を検出し、前記光に対応する電気信号を出力する光検出器と、
前記光源が出射する前記照射光のパワーを決定し、かつ前記電気信号に基づいて前記被検部における血流に関する生体情報を計測する制御回路とを備え、
前記制御回路は、前記電気信号に基づいて、前記光源と前記被検部との距離を検出し、かつ前記距離が長いほど前記照射光の前記パワーが大きくなるように前記照射光の前記パワーを決定する生体情報計測装置。 - 前記制御回路は、さらに、第1時刻における前記距離である第1距離と、前記第1時刻より後の第2時刻における前記距離である第2距離とを比較し、前記比較の結果、前記距離が変動したと判定した場合、前記照射光の前記パワーを再度決定する、
請求項1に記載の生体情報計測装置。 - 前記光検出器は、複数のフレームを含む、前記被検部の動画を取得するイメージセンサであり、
前記制御回路は、所定枚数のフレーム毎に、前記第1距離と前記第2距離との前記比較を行う、
請求項2に記載の生体情報計測装置。 - 前記制御回路は、さらに、前記生体情報の前記計測が正常か否かを判定し、かつ前記計測が正常に行えなくなったことを検出した場合、前記第1距離と前記第2距離との前記比較を行う、
請求項2に記載の生体情報計測装置。 - 前記光検出器は、前記被検部の画像を取得するイメージセンサであり、
前記電気信号は、前記画像を示す信号を含み、
前記制御回路は、前記画像を示す前記信号に基づいて、第1時刻における前記被検部の輝度である第1輝度と、前記第1時刻より後の第2時刻における前記被検部の輝度である第2輝度と、前記第1輝度と前記第2輝度との差である輝度変動量を検出し、かつ前記輝度変動量に応じて、前記照射光の前記パワーを調整する、
請求項1に記載の生体情報計測装置。 - 前記画像が、複数のフレームを含む動画であり、
前記制御回路は、所定枚数のフレーム毎に、前記輝度変動量を検出する、
請求項5に記載の生体情報計測装置。 - 前記制御回路は、さらに、前記生体情報の前記計測が正常か否かを判定し、かつ前記計測が正常に行えなくなったことを検出した場合、前記輝度変動量を検出する、
請求項5に記載の生体情報計測装置。 - 前記制御回路は、さらに、第1時刻における前記距離である第1距離と、前記第1時刻より後の第2時刻における前記距離である第2距離との差である距離変動量を検出し、かつ前記距離変動量に応じて、前記照射光の前記パワーを調整する、
請求項1に記載の生体情報計測装置。 - 前記画像が、複数のフレームを含む動画であり、
前記制御回路は、所定枚数のフレーム毎に、前記距離変動量を検出する、
請求項8に記載の生体情報計測装置。 - 前記制御回路は、さらに、前記生体情報の前記計測が正常か否かを判定し、かつ前記計測が正常に行えなくなったことを検出した場合、前記距離変動量を検出する、
請求項8に記載の生体情報計測装置。 - 前記制御回路は、さらに、前記電気信号に基づいて、前記被検部の位置を検出し、前記位置に基づいて、前記被検者において前記照射光が照射される位置を決定する、
請求項1に記載の生体情報計測装置。 - 前記光検出器は、前記被検部の画像を取得するイメージセンサであり、
前記電気信号は、前記画像を示す信号を含み、
前記制御回路は、前記画像を示す前記信号に基づく画像認識によって前記被検部の位置を検出する、
請求項11に記載の生体情報計測装置。 - 前記生体情報計測装置は、第1光検出器及び第2光検出器を備え、
前記第1光検出器及び前記第2光検出器の各々は、前記光検出器であり、
前記第2光検出器はイメージセンサであり、
前記第1光検出器は、前記被検者からの前記光のうち、前記照射光に含まれる波長の成分を検出し、前記波長の前記成分に対応する第1電気信号を出力し、
前記第2光検出器は、前記被検者からの前記光のうち、可視光の成分を検出し、前記可視光の前記成分に対応する第2電気信号を出力し、
前記制御回路は、前記第2電気信号に基づいて、前記距離を検出し、前記第1電気信号に基づいて、前記生体情報を計測する、
請求項1に記載の生体情報計測装置。 - 前記照射光はパルス光であり、
前記制御回路は、前記光源が前記パルス光を出射してから前記光検出器が前記パルス光を検出するまでの時間に基づいて前記距離を検出する、
請求項1に記載の生体情報計測装置。 - 前記照射光の経路上に配置され、前記被検者において前記照射光が照射される前記位置を変更する光学素子をさらに備え、
前記制御回路は、前記電気信号に基づいて前記光学素子を制御する、
請求項11に記載の生体情報計測装置。 - 前記被検部は前記被検者の額であり、
前記生体情報は脳血流に関する情報である、
請求項1に記載の生体情報計測装置。 - 前記光検出器から出力された前記電気信号を外部機器に送信する
インタフェースをさらに備える、
請求項1に記載の生体情報計測装置。 - 被検者の被検部に照射するための照射光を出射する光源と、
前記被検者からの光を検出し、前記光に対応する第1電気信号を出力する光検出器と、
前記光源が出射する前記照射光のパワーを決定し、かつ前記第1電気信号に基づいて前記被検部における血流に関する生体情報を計測する制御回路と、
前記被検部の画像を取得し、前記画像を示す信号を含む第2電気信号を出力するイメージセンサを備える外部機器と通信するためのインタフェースとを備え、
前記インタフェースは、前記外部機器から前記第2電気信号を受信し、かつ前記外部機器に前記第1電気信号を送信し、
前記制御回路は、前記第2電気信号に基づいて、前記光源と前記被検部との距離を検出し、かつ前記距離が長いほど前記照射光の前記パワーが大きくなるように前記照射光の前記パワーを決定する生体情報計測装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201611126774.4A CN106943117B (zh) | 2016-01-07 | 2016-12-09 | 生物体信息计测装置 |
| US15/391,179 US10799129B2 (en) | 2016-01-07 | 2016-12-27 | Biological information measuring device including light source, light detector, and control circuit |
| US17/010,633 US20200397316A1 (en) | 2016-01-07 | 2020-09-02 | Biological information measuring device including light source, light detector, and control circuit |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016001999 | 2016-01-07 | ||
| JP2016001998 | 2016-01-07 | ||
| JP2016001999 | 2016-01-07 | ||
| JP2016001998 | 2016-01-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017124153A true JP2017124153A (ja) | 2017-07-20 |
| JP6928906B2 JP6928906B2 (ja) | 2021-09-01 |
Family
ID=59363535
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016207065A Active JP6928906B2 (ja) | 2016-01-07 | 2016-10-21 | 生体情報計測装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6928906B2 (ja) |
| CN (1) | CN106943117B (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019039104A1 (ja) * | 2017-08-24 | 2019-02-28 | パナソニックIpマネジメント株式会社 | 生体計測装置およびヘッドマウントディスプレイ装置 |
| JP2019115561A (ja) * | 2017-12-27 | 2019-07-18 | 国立大学法人滋賀医科大学 | 心理状態判定方法、判定装置、判定システムおよび判定プログラム |
| JP2019136183A (ja) * | 2018-02-07 | 2019-08-22 | 株式会社デンソー | 感情識別装置 |
| WO2020044854A1 (ja) * | 2018-08-30 | 2020-03-05 | パナソニックIpマネジメント株式会社 | 生体計測装置、及び生体計測方法 |
| WO2020255840A1 (ja) * | 2019-06-20 | 2020-12-24 | ソニー株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| CN112236084A (zh) * | 2018-12-10 | 2021-01-15 | 松下知识产权经营株式会社 | 光计测装置 |
| JP2021108752A (ja) * | 2020-01-07 | 2021-08-02 | シャープ株式会社 | 生体情報計測装置、生体情報計測システム、生体情報計測装置の制御方法、及び制御プログラム |
| US11557148B2 (en) | 2018-03-15 | 2023-01-17 | Panasonic Intellectual Property Management Co., Ltd. | System, computer-readable non-transitory recording medium, and method for estimating psychological state of user |
| JP2023025703A (ja) * | 2017-07-26 | 2023-02-22 | パラマウントベッド株式会社 | 評価システム |
| WO2023090188A1 (ja) * | 2021-11-22 | 2023-05-25 | パナソニックIpマネジメント株式会社 | 光検出システム、処理装置、光検出システムを制御する方法、およびプログラム |
| EP4278949A1 (en) * | 2022-04-20 | 2023-11-22 | Canon Kabushiki Kaisha | Electronic apparatus, control method of electronic apparatus, program, and computer readable medium |
| JP7442805B2 (ja) | 2020-06-04 | 2024-03-05 | 東京都公立大学法人 | 対話支援装置、対話支援方法及びプログラム |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108837273A (zh) * | 2018-04-10 | 2018-11-20 | 广东小天才科技有限公司 | 一种辅助睡眠的播放控制方法及终端设备 |
| JP7386438B2 (ja) * | 2018-12-20 | 2023-11-27 | パナソニックIpマネジメント株式会社 | 生体計測装置、生体計測方法、コンピュータ読み取り可能な記録媒体、およびプログラム |
| CN113614566A (zh) * | 2019-03-27 | 2021-11-05 | 松下知识产权经营株式会社 | 测距方法、测距装置以及程序 |
| CN110215198B (zh) * | 2019-06-03 | 2022-04-29 | Oppo广东移动通信有限公司 | 中心静脉压测量方法及相关装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6359930A (ja) * | 1986-08-30 | 1988-03-15 | キヤノン株式会社 | 血流計 |
| US5436655A (en) * | 1991-08-09 | 1995-07-25 | Olympus Optical Co., Ltd. | Endoscope apparatus for three dimensional measurement for scanning spot light to execute three dimensional measurement |
| JP2003337102A (ja) * | 2002-05-20 | 2003-11-28 | Communication Research Laboratory | 生体活動計測装置 |
| JP2004154402A (ja) * | 2002-11-07 | 2004-06-03 | Hitachi Medical Corp | 光刺激装置およびこれを用いた生体光計測装置 |
| JP2013224838A (ja) * | 2012-04-20 | 2013-10-31 | Seiko Epson Corp | 成分濃度測定装置及び成分濃度測定方法 |
| JP2015134157A (ja) * | 2013-12-20 | 2015-07-27 | パナソニック インテレクチュアル プロパティ コーポレーション オブアメリカPanasonic Intellectual Property Corporation of America | 光脳機能計測装置 |
| WO2015132063A1 (en) * | 2014-03-06 | 2015-09-11 | Koninklijke Philips N.V. | Physiological property determination apparatus |
| JP2017144225A (ja) * | 2016-02-17 | 2017-08-24 | パナソニックIpマネジメント株式会社 | 生体情報検出装置 |
| JP2017187471A (ja) * | 2016-03-31 | 2017-10-12 | パナソニックIpマネジメント株式会社 | 撮像装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2653228C (en) * | 2006-05-24 | 2016-09-13 | Tarilian Laser Technologies, Limited | Optical vital sign detection method and measurement device |
| JP2011130844A (ja) * | 2009-12-22 | 2011-07-07 | Olympus Corp | 血圧センサ、その製造方法及び血圧センサシステム |
| US9198624B2 (en) * | 2010-07-06 | 2015-12-01 | Hitachi Medical Corporation | Biological photometric device and biological photometry method using same |
| CN101982826B (zh) * | 2010-11-10 | 2013-03-06 | 中国船舶重工集团公司第七一○研究所 | 一种光源亮度自动调整的手指静脉采集识别方法 |
| JP5017501B1 (ja) * | 2011-01-24 | 2012-09-05 | 株式会社アクトメディカルサービス | 血管脈波測定システム |
| JP6053512B2 (ja) * | 2012-12-28 | 2016-12-27 | キヤノン株式会社 | 被検体情報取得装置およびその制御方法 |
| JP2016007222A (ja) * | 2014-06-20 | 2016-01-18 | キヤノン株式会社 | 被検体情報取得装置 |
-
2016
- 2016-10-21 JP JP2016207065A patent/JP6928906B2/ja active Active
- 2016-12-09 CN CN201611126774.4A patent/CN106943117B/zh active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6359930A (ja) * | 1986-08-30 | 1988-03-15 | キヤノン株式会社 | 血流計 |
| US5436655A (en) * | 1991-08-09 | 1995-07-25 | Olympus Optical Co., Ltd. | Endoscope apparatus for three dimensional measurement for scanning spot light to execute three dimensional measurement |
| JP2003337102A (ja) * | 2002-05-20 | 2003-11-28 | Communication Research Laboratory | 生体活動計測装置 |
| JP2004154402A (ja) * | 2002-11-07 | 2004-06-03 | Hitachi Medical Corp | 光刺激装置およびこれを用いた生体光計測装置 |
| JP2013224838A (ja) * | 2012-04-20 | 2013-10-31 | Seiko Epson Corp | 成分濃度測定装置及び成分濃度測定方法 |
| JP2015134157A (ja) * | 2013-12-20 | 2015-07-27 | パナソニック インテレクチュアル プロパティ コーポレーション オブアメリカPanasonic Intellectual Property Corporation of America | 光脳機能計測装置 |
| WO2015132063A1 (en) * | 2014-03-06 | 2015-09-11 | Koninklijke Philips N.V. | Physiological property determination apparatus |
| JP2017144225A (ja) * | 2016-02-17 | 2017-08-24 | パナソニックIpマネジメント株式会社 | 生体情報検出装置 |
| JP2017187471A (ja) * | 2016-03-31 | 2017-10-12 | パナソニックIpマネジメント株式会社 | 撮像装置 |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023025703A (ja) * | 2017-07-26 | 2023-02-22 | パラマウントベッド株式会社 | 評価システム |
| JP7445728B2 (ja) | 2017-07-26 | 2024-03-07 | パラマウントベッド株式会社 | 評価システム |
| JPWO2019039104A1 (ja) * | 2017-08-24 | 2020-08-06 | パナソニックIpマネジメント株式会社 | 生体計測装置およびヘッドマウントディスプレイ装置 |
| US11559205B2 (en) | 2017-08-24 | 2023-01-24 | Panasonic Intellectual Property Management Co., Ltd. | Biological measuring device and head mounted display apparatus |
| CN110891481A (zh) * | 2017-08-24 | 2020-03-17 | 松下知识产权经营株式会社 | 生物体计测装置及头戴式显示器装置 |
| WO2019039104A1 (ja) * | 2017-08-24 | 2019-02-28 | パナソニックIpマネジメント株式会社 | 生体計測装置およびヘッドマウントディスプレイ装置 |
| CN110891481B (zh) * | 2017-08-24 | 2023-07-04 | 松下知识产权经营株式会社 | 生物体计测装置及头戴式显示器装置 |
| JP7142246B2 (ja) | 2017-08-24 | 2022-09-27 | パナソニックIpマネジメント株式会社 | 生体計測装置、ヘッドマウントディスプレイ装置、および生体計測方法 |
| JP2019115561A (ja) * | 2017-12-27 | 2019-07-18 | 国立大学法人滋賀医科大学 | 心理状態判定方法、判定装置、判定システムおよび判定プログラム |
| JP7051083B2 (ja) | 2017-12-27 | 2022-04-11 | 国立大学法人滋賀医科大学 | 心理状態判定方法、判定装置、判定システムおよび判定プログラム |
| JP2019136183A (ja) * | 2018-02-07 | 2019-08-22 | 株式会社デンソー | 感情識別装置 |
| JP7080657B2 (ja) | 2018-02-07 | 2022-06-06 | 株式会社デンソー | 感情識別装置 |
| US11963772B2 (en) | 2018-03-15 | 2024-04-23 | Panasonic Intellectual Property Management Co., Ltd. | System, computer-readable non-transitory recording medium, and method for estimating psychological state of user |
| US11557148B2 (en) | 2018-03-15 | 2023-01-17 | Panasonic Intellectual Property Management Co., Ltd. | System, computer-readable non-transitory recording medium, and method for estimating psychological state of user |
| JPWO2020044854A1 (ja) * | 2018-08-30 | 2021-08-26 | パナソニックIpマネジメント株式会社 | 生体計測装置、及び生体計測方法 |
| WO2020044854A1 (ja) * | 2018-08-30 | 2020-03-05 | パナソニックIpマネジメント株式会社 | 生体計測装置、及び生体計測方法 |
| CN112236084A (zh) * | 2018-12-10 | 2021-01-15 | 松下知识产权经营株式会社 | 光计测装置 |
| WO2020255840A1 (ja) * | 2019-06-20 | 2020-12-24 | ソニー株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| JP2021108752A (ja) * | 2020-01-07 | 2021-08-02 | シャープ株式会社 | 生体情報計測装置、生体情報計測システム、生体情報計測装置の制御方法、及び制御プログラム |
| JP7431584B2 (ja) | 2020-01-07 | 2024-02-15 | シャープ株式会社 | 生体情報計測装置、生体情報計測システム、生体情報計測装置の作動方法、及び制御プログラム |
| JP7442805B2 (ja) | 2020-06-04 | 2024-03-05 | 東京都公立大学法人 | 対話支援装置、対話支援方法及びプログラム |
| WO2023090188A1 (ja) * | 2021-11-22 | 2023-05-25 | パナソニックIpマネジメント株式会社 | 光検出システム、処理装置、光検出システムを制御する方法、およびプログラム |
| EP4278949A1 (en) * | 2022-04-20 | 2023-11-22 | Canon Kabushiki Kaisha | Electronic apparatus, control method of electronic apparatus, program, and computer readable medium |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6928906B2 (ja) | 2021-09-01 |
| CN106943117B (zh) | 2021-08-17 |
| CN106943117A (zh) | 2017-07-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6928906B2 (ja) | 生体情報計測装置 | |
| US20200178871A1 (en) | Biological information detection device including calculation circuit that generates signal of biological information | |
| JP6865384B2 (ja) | 生体情報検出装置 | |
| US20200397316A1 (en) | Biological information measuring device including light source, light detector, and control circuit | |
| JP7246354B2 (ja) | 計測装置および計測方法 | |
| KR102370542B1 (ko) | 활력 신호를 측정하기 위한 장치 및 방법 | |
| WO2019124023A1 (ja) | 生体計測装置、生体計測方法、及び判定装置 | |
| US20210259565A1 (en) | Biometric apparatus, biometric method, and non-transitory computer-readable storage medium | |
| US11963772B2 (en) | System, computer-readable non-transitory recording medium, and method for estimating psychological state of user | |
| JP2011530316A (ja) | 血液分析 | |
| US10955918B1 (en) | Head-coupled optode assembly | |
| JP2024016142A (ja) | コンピュータにおける情報処理方法および生体計測システム | |
| Valero et al. | Development of a noninvasive blood glucose monitoring system prototype: Pilot study | |
| Zaman et al. | Changes in morphology and optical properties of sclera and choroidal layers due to hyperosmotic agent | |
| US11314329B1 (en) | Neural decoding with co-learning for brain computer interfaces | |
| Zainal et al. | Design and development of wireless PPG data acquisition for health monitoring application using Bluetooth module | |
| US20220276509A1 (en) | Optical Measurement System Integrated into a Wearable Glasses Assembly | |
| JP6238278B2 (ja) | 脈動測定装置、脈動測定方法、及びプログラム | |
| Sujana et al. | Voice Enabled Pulse Oximeter | |
| KR20220107889A (ko) | 산소포화도 추정 장치 및 방법 | |
| Westphal et al. | Examination of a Novel Method for Non-Contact, Low-Cost, and Automated Heart-Rate Detection in Ambient Light Using Photoplethysmographic Imaging | |
| Poghosyan et al. | Noninvasive continuous blood pressure monitoring |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190903 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200624 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200707 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210629 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210726 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6928906 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |