JP2017131973A - ロボット軌道生成方法、およびロボット軌道生成装置 - Google Patents
ロボット軌道生成方法、およびロボット軌道生成装置 Download PDFInfo
- Publication number
- JP2017131973A JP2017131973A JP2016011688A JP2016011688A JP2017131973A JP 2017131973 A JP2017131973 A JP 2017131973A JP 2016011688 A JP2016011688 A JP 2016011688A JP 2016011688 A JP2016011688 A JP 2016011688A JP 2017131973 A JP2017131973 A JP 2017131973A
- Authority
- JP
- Japan
- Prior art keywords
- trajectory
- robot
- obstacle
- operation command
- generation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
- B25J9/1666—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0084—Programme-controlled manipulators comprising a plurality of manipulators
- B25J9/0087—Dual arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1682—Dual arm manipulator; Coordination of several manipulators
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39082—Collision, real time collision avoidance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39135—For multiple manipulators operating at same time, avoid collision
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40476—Collision, planning for collision free path
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
Abstract
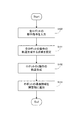
【解決手段】複数のロボットアームの軌道の始点および終点を含む動作指令リストを生成する(軌道定義データ生成行程:S200)。動作指令リストに基づき各々の軌道生成を行う順序を決定する(生成順序決定行程:S210)。動作指令リスト中の特定のロボットアームに関し、始点および終点に基づき、障害物メモリに他のロボットアームの軌道生成に関して登録された障害物空間を回避するよう、軌道生成を行う(軌道生成行程:S230)。生成軌道で当該ロボットアームを動作させた際、当該アームの躯体によって掃引される掃引空間を、他のロボットアームが回避すべき障害物空間として障害物メモリに追加する(障害物登録行程:S240、S250)。
【選択図】図5
Description
図1、図2は本発明の実施例1に係るロボット軌道生成システムの構成を示している。図1は、ロボット軌道生成システム全体の構成を示している。図1において、例えば演算処理部1はPC(パーソナルコンピュータ)のようなハードウェアを利用して構成することができる。演算処理部1には、作業者(ロボット教示者)が動作指令を入力するための入力部としてキーボード11、マウス12(あるいはトラックパッドのようなポインティングデバイス)が接続されている。また、作業者が入力操作した動作指令や、それに基づき生成されたロボット軌道などを確認するための表示装置としてディスプレイ13が接続されている。
Op1 = { Ma1 、 Mb1 }
から成り、各動作(Ma1、Mb1)は
Ma1 = ( Sa 、 Ga ) 、 Mb1 = ( Sb 、 Gb )
から成る。
上記実施例1では、ロボットアーム5、6の2つの動作指令から軌道生成を行う最も単純な例で、ロボットアーム(5、6)同士の干渉のない軌道を生成する手法につき説明した。実施例1の図5に示したようなステップ構成のみによって、より多数の軌道定義データについて軌道生成および障害物登録を繰り返す場合、登録された多数の障害物によって新たな軌道を生成できなくなる可能性がある。
Op1 = { Ma1 、 Ma2 、 Ma3 、 Mb1 、 Mb2 }
Ma1 = ( Sa1、 Ga1 )、 Mb1 = ( Sb1 、 Gb1 )
Ma2 = ( Sa2、 Ga2 )、 Mb2 = ( Sb2 、 Gb2 )
Ma3 = ( Sa3 、 Ga3 )
図7のステップS310では、設定されている優先順位に基づき、軌道生成の順位を決定する。この軌道生成の優先順位(ロボット単位あるいは動作指令単位)の制御に関しては、上述のように種々の方式が考えられ、例えば、作業者の優先順位指定を許容することが考えられる。
Op1−1 = { Ma1 、 Mb1 } 、
Op1−2 = { Ma2 、 Mb2 、 Ma3 }
のような構成となる。なお、CPU20は、上記のような動作指令分割を行う場合、実環境において、分割した第1(前半)、第2(後半)の動作指令の各動作を同期的に制御するための同期指令(図10のSp1)を生成する。この同期指令(図10のSp1)は、例えば生成した軌道データ群の分割の起きた位置に挿入するものとする。
実施例2で軌道生成が不可能となる事態として、例えば図8(d)のように、軌道生成の終点Ga2(始点の場合も同様である)が、他のロボットアームの軌道生成によって生成された障害物(SVb1)に最初から干渉している例を示した。本実施例3では、このような事態を回避できるような処理手法につき説明する。本実施例でも、図1〜図4、図14などに示した軌道生成システムの基本構成は上述の実施例1、2と同様であるものとし、既に説明済みの部材や制御については可能な限り重複した説明は省略するものとする。
Op1 = { Ma1 、 Ma2 、 Ma3 、 Mb1 、 Mb2 }
Ma1 = ( Sa1 、 Ga1 )、Mb1 = ( Sb1 、 Gb1 )
Ma2 = ( Sa2 、 Ga2 )、Mb2 = ( Sb2 、 Gb2 )
Ma3 = ( Sa3 、 Ga3 )
のような動作指令によって構成されている。上記の各始点と終点の位置は図11(a)に示す通りである。
Claims (16)
- 制御装置によって、同じ作業領域に配置されて動作する複数のロボットアームを動作させる軌道を生成するロボット軌道生成方法において、
前記制御装置が、生成すべき複数のロボットアームの軌道について、各軌道の始点および終点を含む軌道定義データを格納した動作指令リストを生成する軌道定義データ生成行程と、
前記制御装置が、前記軌道定義データ生成行程で生成された前記動作指令リストに含まれる複数の前記軌道定義データに基づき各々の軌道生成を行う軌道生成順序を決定する生成順序決定行程と、
前記制御装置が、前記生成順序決定行程で決定された軌道生成順序に基づき、前記動作指令リストに含まれる特定のロボットアームに関する前記軌道定義データに基づき、障害物メモリに登録された障害物空間のうち、当該ロボットアームに関して登録された障害物空間を除く障害物空間を回避するよう、当該ロボットアームを動作させる軌道を生成する軌道生成行程と、
前記制御装置が、前記軌道生成行程で生成された軌道で当該ロボットアームを動作させた際、当該ロボットアームの躯体によって掃引される掃引空間を、当該ロボットアームを除く他のロボットアームが前記軌道生成行程において回避すべき障害物空間として前記障害物メモリに追加登録する障害物登録行程と、
を含むロボット軌道生成方法。 - 請求項1に記載のロボット軌道生成方法において、前記制御装置は、前記軌道生成行程および前記障害物登録行程を繰り返し実行することにより、前記動作指令リストに含まれる複数の前記軌道定義データに基づき軌道生成を行うに際し、前記障害物メモリに登録された障害物空間を回避する軌道が生成不可能となった場合は、前記動作指令リストに含まれる前記軌道定義データを、その時点で生成済みの軌道に対応する軌道定義データから成る第1の動作指令と、未生成の軌道に対応する軌道定義データから成る第2の動作指令と、に分割し、前記障害物メモリに登録されている障害物空間のデータをクリアしてから前記第2の動作指令に含まれる軌道定義データについて前記軌道生成行程および前記障害物登録行程を繰り返し実行し、生成した全部の軌道データに基づき、各々のロボットアームを動作させる場合に、前記第1の動作指令に対応するロボットアームの動作と、前記第2の動作指令に対応するロボットアームの動作と、を同期的に実行させるための同期指令を生成するロボット軌道生成方法。
- 請求項1または2に記載のロボット軌道生成方法において、前記制御装置は、前記軌道生成行程および前記障害物登録行程を繰り返し実行することにより、前記動作指令リストに含まれる複数の前記軌道定義データに基づき軌道生成を行うのに先立ち、前記軌道定義データの各々の始点および終点において当該ロボットアームの躯体の占める空間を前記障害物メモリに登録しておくロボット軌道生成方法。
- 請求項1から3のいずれか1項に記載のロボット軌道生成方法において、前記制御装置が、前記軌道定義データ生成行程において、作業者の入力操作に基づき、生成すべき複数のロボットアームの軌道について、各軌道の始点および終点を含む軌道定義データを格納した動作指令リストを生成するロボット軌道生成方法。
- 請求項1から4のいずれか1項に記載のロボット軌道生成方法において、前記制御装置が、生成順序決定行程において、作業者の入力操作に基づき、前記動作指令リストに含まれる複数の前記軌道定義データに基づき各々の軌道生成を行う軌道生成順序を決定するロボット軌道生成方法。
- 請求項1から4のいずれか1項に記載のロボット軌道生成方法において、前記制御装置が、生成順序決定行程において、前記動作指令リストに含まれる複数の前記軌道定義データに基づき各々の軌道生成を行う軌道生成順序を決定するロボット軌道生成方法。
- 請求項6に記載のロボット軌道生成方法において、前記制御装置が、生成順序決定行程において、前記動作指令リストでより多数の前記軌道定義データが含まれるロボットアームの軌道生成が、前記動作指令リストでより少数の前記軌道定義データが含まれるロボットアームの軌道生成よりも先に実行されるよう、前記動作指令リストに含まれる複数の前記軌道定義データに基づき各々の軌道生成を行う軌道生成順序を決定するロボット軌道生成方法。
- 前記制御装置に、請求項1から7のいずれか1項に記載の前記各行程を実行させるロボット軌道生成プログラム。
- 請求項8に記載の前記ロボット軌道生成プログラムを格納したコンピュータ読み取り可能な記録媒体。
- 制御装置によって、同じ作業領域に配置されて動作する複数のロボットアームを動作させる軌道を生成するロボット軌道生成装置において、
前記軌道を生成する場合に、前記ロボットアームの躯体を通過させることができない障害物空間を登録する障害物メモリを有し、
前記制御装置は、
生成すべき複数のロボットアームの軌道について、各軌道の始点および終点を含む軌道定義データを格納した動作指令リストを生成し、
生成された前記動作指令リストに含まれる複数の前記軌道定義データに基づき各々の軌道生成を行う軌道生成順序を決定し、
決定した軌道生成順序に基づき、前記動作指令リストに含まれる前記軌道定義データに基づき、障害物メモリに登録された障害物空間のうち、当該ロボットアームに関して登録された障害物空間を除く障害物空間を回避するよう、当該ロボットアームを動作させる軌道を生成するとともに、
生成された軌道で当該ロボットアームを動作させた際、当該ロボットアームの躯体によって掃引される掃引空間を、当該ロボットアームを除く他のロボットアームが軌道生成において回避すべき障害物空間として前記障害物メモリに追加登録する、
ロボット軌道生成処理を実行するロボット軌道生成装置。 - 請求項10に記載のロボット軌道生成装置において、作業者の入力操作に基づき、生成すべき複数のロボットアームの軌道について、各軌道の始点および終点を入力する軌道定義データ入力装置を備えたロボット軌道生成装置。
- 請求項10または11に記載のロボット軌道生成装置において、生成すべき複数のロボットアームの軌道について、各軌道の始点および終点を作業者に入力させる軌道定義データ入力手段を備えたロボット軌道生成装置。
- 請求項10から12のいずれか1項に記載のロボット軌道生成装置において、前記動作指令リストに含まれる複数の前記軌道定義データに基づき各々の軌道生成を行う軌道生成順序を作業者に入力させる入力手段を備えたロボット軌道生成装置。
- 請求項10から13のいずれか1項に記載のロボット軌道生成装置において、前記複数のロボットアームが配置された仮想空間を表示する表示装置を備えたロボット軌道生成装置。
- 請求項14に記載のロボット軌道生成装置において、前記表示装置により、前記複数のロボットアームに関して実行される前記ロボット軌道生成処理を表示するロボット軌道生成装置。
- 請求項14または15に記載のロボット軌道生成装置において、前記ロボット軌道生成処理で生成された軌道で動作する前記ロボットアームを前記表示装置の前記仮想空間に表示するロボット軌道生成装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016011688A JP6576255B2 (ja) | 2016-01-25 | 2016-01-25 | ロボット軌道生成方法、ロボット軌道生成装置、および製造方法 |
| EP17152042.2A EP3195990B1 (en) | 2016-01-25 | 2017-01-18 | Robot trajectory generation method, apparatus, computer program and computer readable storage medium |
| US15/413,689 US10207406B2 (en) | 2016-01-25 | 2017-01-24 | Robot trajectory generation method, robot trajectory generation apparatus, product fabrication method, recording medium, program, and robot system |
| US16/243,949 US11161247B2 (en) | 2016-01-25 | 2019-01-09 | Robot trajectory generation method, robot trajectory generation apparatus, storage medium, and manufacturing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016011688A JP6576255B2 (ja) | 2016-01-25 | 2016-01-25 | ロボット軌道生成方法、ロボット軌道生成装置、および製造方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019148152A Division JP6750909B2 (ja) | 2019-08-09 | 2019-08-09 | ロボット軌道生成方法、ロボット軌道生成装置、および製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017131973A true JP2017131973A (ja) | 2017-08-03 |
| JP2017131973A5 JP2017131973A5 (ja) | 2019-02-28 |
| JP6576255B2 JP6576255B2 (ja) | 2019-09-18 |
Family
ID=57860706
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016011688A Active JP6576255B2 (ja) | 2016-01-25 | 2016-01-25 | ロボット軌道生成方法、ロボット軌道生成装置、および製造方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US10207406B2 (ja) |
| EP (1) | EP3195990B1 (ja) |
| JP (1) | JP6576255B2 (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109240092A (zh) * | 2018-11-30 | 2019-01-18 | 长春工业大学 | 基于多智能体可重构模块化柔性机械臂轨迹跟踪控制方法 |
| JP2019082923A (ja) * | 2017-10-31 | 2019-05-30 | 富士通株式会社 | 情報処理装置、工程計画表示プログラム及び工程計画表示方法 |
| JP2019171507A (ja) * | 2018-03-28 | 2019-10-10 | Ntn株式会社 | 複合作業装置 |
| JP2020011326A (ja) * | 2018-07-17 | 2020-01-23 | ファナック株式会社 | ロボットシステム |
| CN112140102A (zh) * | 2020-06-08 | 2020-12-29 | 深圳市越疆科技有限公司 | 一种工业机器人的避障方法、装置和系统 |
| CN112450807A (zh) * | 2020-11-06 | 2021-03-09 | 苏宁智能终端有限公司 | 扫地机器人障碍物移除操控方法、装置及系统 |
| CN113211443A (zh) * | 2021-05-18 | 2021-08-06 | 广州市香港科大霍英东研究院 | 一种协作机器人柔顺控制方法、系统及装置 |
| JP2022539324A (ja) * | 2019-06-24 | 2022-09-08 | リアルタイム ロボティクス, インコーポレーテッド | 共用ワークスペースにおける複数のロボットの動作計画 |
| WO2023162300A1 (ja) * | 2022-02-28 | 2023-08-31 | 株式会社日立製作所 | 軌道計画装置及び軌道計画方法 |
| US11745346B2 (en) | 2018-02-06 | 2023-09-05 | Realtime Robotics, Inc. | Motion planning of a robot storing a discretized environment on one or more processors and improved operation of same |
| US11964393B2 (en) | 2018-03-21 | 2024-04-23 | Realtime Robotics, Inc. | Motion planning of a robot for various environments and tasks and improved operation of same |
| US12017364B2 (en) | 2019-04-17 | 2024-06-25 | Realtime Robotics, Inc. | Motion planning graph generation user interface, systems, methods and articles |
Families Citing this family (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101982226B1 (ko) * | 2014-12-26 | 2019-05-24 | 카와사키 주코교 카부시키 카이샤 | 로봇 시스템 |
| JP6328599B2 (ja) * | 2015-11-20 | 2018-05-23 | ファナック株式会社 | ロボットの動作可能範囲を算出するロボットの手動送り装置 |
| EP3537248A1 (en) | 2016-06-10 | 2019-09-11 | Duke University | Motion planning for autonomous vehicles and reconfigurable motion planning processors |
| DE102016120763B4 (de) * | 2016-10-31 | 2019-03-14 | Pilz Gmbh & Co. Kg | Verfahren zur kollisionsfreien Bewegungsplanung |
| US10363657B2 (en) * | 2016-12-23 | 2019-07-30 | X Development Llc | Multi-agent coordination under sparse networking |
| JP6506348B2 (ja) * | 2017-06-14 | 2019-04-24 | ファナック株式会社 | ロボットの軌道を修正するロボットの教示装置 |
| US20210166568A1 (en) * | 2017-06-16 | 2021-06-03 | FLIR Belgium BVBA | Collision avoidance systems and methods |
| JP6897376B2 (ja) * | 2017-07-11 | 2021-06-30 | トヨタ自動車株式会社 | 移動計画装置、移動ロボット、および移動計画プログラム |
| JP6633587B2 (ja) * | 2017-10-05 | 2020-01-22 | ファナック株式会社 | ロボットの構成部材の速度を制限する制御装置 |
| US10890898B2 (en) * | 2017-11-03 | 2021-01-12 | Drishti Technologies, Inc. | Traceability systems and methods |
| US11504853B2 (en) * | 2017-11-16 | 2022-11-22 | General Electric Company | Robotic system architecture and control processes |
| EP3502708B1 (en) * | 2017-12-21 | 2023-09-27 | Tecan Trading AG | Monitoring a laboratory automation device via a simulation model |
| WO2019139815A1 (en) | 2018-01-12 | 2019-07-18 | Duke University | Apparatus, method and article to facilitate motion planning of an autonomous vehicle in an environment having dynamic objects |
| CN108326859A (zh) * | 2018-05-07 | 2018-07-27 | 广东工业大学 | 一种有效避免机械臂在工作过程中发生干涉的方法 |
| JP6508691B1 (ja) * | 2018-10-15 | 2019-05-08 | 株式会社Mujin | 制御装置、作業ロボット、プログラム、及び、制御方法 |
| CN111136651A (zh) * | 2018-11-01 | 2020-05-12 | 锥能机器人(上海)有限公司 | 控制系统、驱动设备、驱动设备运行处理方法及装置 |
| US11911908B2 (en) | 2018-12-21 | 2024-02-27 | Intrinsic Innovation Llc | Dynamic probabilistic motion planning |
| CN109760045B (zh) * | 2018-12-27 | 2020-11-17 | 西安交通大学 | 一种离线编程轨迹生成方法及基于该方法的双机器人协同装配系统 |
| JP7178900B2 (ja) * | 2018-12-28 | 2022-11-28 | 川崎重工業株式会社 | ロボットの作業計画作成方法および作業計画作成装置 |
| JP7143776B2 (ja) * | 2019-01-31 | 2022-09-29 | オムロン株式会社 | 制御システム、及び、制御システムの制御方法 |
| EP3725472A1 (de) * | 2019-04-16 | 2020-10-21 | Siemens Aktiengesellschaft | Verfahren zum ermitteln einer trajektorie eines roboters |
| CN110142764B (zh) * | 2019-05-15 | 2021-11-09 | 南京邮电大学 | 力矩姿态无线传感器的数据融合处理系统及处理方法 |
| CN114206698B (zh) | 2019-06-03 | 2024-07-02 | 实时机器人有限公司 | 在具有动态障碍物的环境中促进运动规划的装置、方法和物品 |
| CN110421556B (zh) * | 2019-06-14 | 2022-07-19 | 河北工业大学 | 一种冗余双臂服务机器人实时避碰的轨迹规划方法及平稳运行方法 |
| JP7368025B2 (ja) | 2019-08-23 | 2023-10-24 | リアルタイム ロボティクス, インコーポレーテッド | 加速度とジャークの制限を維持しながら速度を最適化するロボットの動作計画 |
| US11747787B2 (en) | 2019-08-30 | 2023-09-05 | Intrinsic Innovation Llc | Combining transformers for robotics planning |
| US11577392B2 (en) * | 2019-08-30 | 2023-02-14 | Intrinsic Innovation Llc | Splitting transformers for robotics planning |
| US11745345B2 (en) * | 2019-08-30 | 2023-09-05 | Intrinsic Innovation Llc | Planning by work volumes to avoid conflicts |
| JP7500947B2 (ja) * | 2019-10-17 | 2024-06-18 | オムロン株式会社 | 干渉評価装置、方法、及びプログラム |
| CN110919638B (zh) * | 2019-11-15 | 2021-11-02 | 华中科技大学 | 一种3+4构型双臂协作机器人加工系统及方法 |
| US11224972B2 (en) | 2019-11-22 | 2022-01-18 | Fanuc Corporation | State machine for dynamic path planning |
| JP7475841B2 (ja) * | 2019-11-22 | 2024-04-30 | キヤノン株式会社 | 情報処理方法、ロボットシステム、物品の製造方法、および情報処理装置 |
| DE102019135810B3 (de) * | 2019-12-27 | 2020-10-29 | Franka Emika Gmbh | Erzeugung eines Steuerprogramms für einen Robotermanipulator |
| TW202146189A (zh) | 2020-01-22 | 2021-12-16 | 美商即時機器人股份有限公司 | 於多機器人操作環境中之機器人之建置 |
| DE102020201375B3 (de) * | 2020-02-05 | 2021-06-24 | Magna Steyr Fahrzeugtechnik Ag & Co Kg | Verfahren zur Überprüfung eines Sicherheitsbereichs eines Roboters |
| JP7375587B2 (ja) * | 2020-02-05 | 2023-11-08 | 株式会社デンソー | 軌道生成装置、多リンクシステム、及び軌道生成方法 |
| RU2756437C1 (ru) * | 2020-09-03 | 2021-09-30 | Публичное Акционерное Общество "Сбербанк России" (Пао Сбербанк) | Способ и система планирования движения робота-манипулятора путем коррекции опорных траекторий |
| JP2023551681A (ja) * | 2020-12-02 | 2023-12-12 | リアルタイム ロボティクス, インコーポレーテッド | ロボット動作計画及び制御においてクリアランス決定を使用するシステム、方法、及びユーザーインターフェース |
| US11828174B2 (en) * | 2021-01-27 | 2023-11-28 | Baker Hughes Oilfield Operations Llc | Utilizing cobots for lab procedures for the purpose of testing and gathering data |
| CN113459086B (zh) * | 2021-05-28 | 2022-07-29 | 北京精密机电控制设备研究所 | 一种超冗余机械臂路径规划方法 |
| CN113547506B (zh) * | 2021-06-28 | 2023-06-30 | 北京精密机电控制设备研究所 | 一种基于六维力传感器的双臂机器人精密装配方法 |
| US20230123463A1 (en) * | 2021-10-15 | 2023-04-20 | Fanuc Corporation | Method of robotic system dynamic velocity modification |
| US20230182299A1 (en) * | 2021-12-14 | 2023-06-15 | Fanuc Corporation | Online auto-interlock strategy |
| DE102022201792B3 (de) | 2022-02-21 | 2023-04-20 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zur automatisierten Koordinierung der Tätigkeiten von mehreren Robotern |
| US20230294287A1 (en) * | 2022-03-15 | 2023-09-21 | Fanuc Corporation | Swept volume deformation |
| CN115488897B (zh) * | 2022-10-28 | 2024-07-19 | 安徽省凤阳县前力玻璃制品有限公司 | 机械手臂码垛最优空间轨迹规划方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03142193A (ja) * | 1989-07-28 | 1991-06-17 | Megamation Inc | 多重ロボットシステム用の衝突防止及び衝突保護の方法及び装置 |
| JPH08166809A (ja) * | 1994-10-14 | 1996-06-25 | Kobe Steel Ltd | 複数台ロボットの干渉回避方法及び作業順・作業分担決定方法 |
| JP2007164417A (ja) * | 2005-12-13 | 2007-06-28 | Fanuc Ltd | 複数のロボット間のインターロック自動設定装置及び自動設定方法 |
| JP2011048621A (ja) * | 2009-08-27 | 2011-03-10 | Honda Motor Co Ltd | ロボットのオフライン教示方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05119814A (ja) | 1991-05-20 | 1993-05-18 | Brother Ind Ltd | ロボツトアームの非干渉制御装置 |
| JPH07271415A (ja) * | 1994-03-30 | 1995-10-20 | Nec Corp | 協調ロボット制御方法 |
| JPH0836410A (ja) | 1994-07-21 | 1996-02-06 | Nissan Motor Co Ltd | ロボットの干渉防止方法およびその装置 |
| US5798627A (en) * | 1995-01-04 | 1998-08-25 | Gilliland; Malcolm T. | Method for simultaneous operation of robot welders |
| US6004016A (en) * | 1996-08-06 | 1999-12-21 | Trw Inc. | Motion planning and control for systems with multiple mobile objects |
| DE102004027944B4 (de) * | 2004-06-08 | 2012-02-16 | Kuka Laboratories Gmbh | Verfahren zum Schützen eines Roboters gegen Kollisionen |
| US9104197B2 (en) * | 2004-06-15 | 2015-08-11 | Abb Ab | Method and system for off-line programming of multiple interacting robots |
| US9144904B2 (en) * | 2008-05-21 | 2015-09-29 | Fanuc Robotics America Corporation | Method and system for automatically preventing deadlock in multi-robot systems |
| US8315738B2 (en) * | 2008-05-21 | 2012-11-20 | Fanuc Robotics America, Inc. | Multi-arm robot system interference check via three dimensional automatic zones |
| JP6282140B2 (ja) * | 2014-02-26 | 2018-02-21 | キヤノン株式会社 | 軌道生成方法、ロボット装置、プログラム及び記録媒体 |
| US9925664B2 (en) * | 2014-02-27 | 2018-03-27 | Fanuc Corporation | Robot simulation device for generation motion path of robot |
| CH709347A2 (de) * | 2014-03-10 | 2015-09-15 | Tecan Trading Ag | Verfahren zur Wegfindung in einem automatisierten Handhabungssystem sowie Handhabungssystem mit entsprechendem Kontrollmodul zur Wegfindung. |
| US9707681B2 (en) * | 2015-07-27 | 2017-07-18 | Siemens Industry Software Ltd. | Anti-collision management of overlapping robotic movements |
-
2016
- 2016-01-25 JP JP2016011688A patent/JP6576255B2/ja active Active
-
2017
- 2017-01-18 EP EP17152042.2A patent/EP3195990B1/en active Active
- 2017-01-24 US US15/413,689 patent/US10207406B2/en active Active
-
2019
- 2019-01-09 US US16/243,949 patent/US11161247B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03142193A (ja) * | 1989-07-28 | 1991-06-17 | Megamation Inc | 多重ロボットシステム用の衝突防止及び衝突保護の方法及び装置 |
| JPH08166809A (ja) * | 1994-10-14 | 1996-06-25 | Kobe Steel Ltd | 複数台ロボットの干渉回避方法及び作業順・作業分担決定方法 |
| JP2007164417A (ja) * | 2005-12-13 | 2007-06-28 | Fanuc Ltd | 複数のロボット間のインターロック自動設定装置及び自動設定方法 |
| JP2011048621A (ja) * | 2009-08-27 | 2011-03-10 | Honda Motor Co Ltd | ロボットのオフライン教示方法 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019082923A (ja) * | 2017-10-31 | 2019-05-30 | 富士通株式会社 | 情報処理装置、工程計画表示プログラム及び工程計画表示方法 |
| US11745346B2 (en) | 2018-02-06 | 2023-09-05 | Realtime Robotics, Inc. | Motion planning of a robot storing a discretized environment on one or more processors and improved operation of same |
| US12090668B2 (en) | 2018-02-06 | 2024-09-17 | Realtime Robotics, Inc. | Motion planning of a robot storing a discretized environment on one or more processors and improved operation of same |
| US12083682B2 (en) | 2018-03-21 | 2024-09-10 | Realtime Robotics, Inc. | Motion planning of a robot for various environments and tasks and improved operation of same |
| US11964393B2 (en) | 2018-03-21 | 2024-04-23 | Realtime Robotics, Inc. | Motion planning of a robot for various environments and tasks and improved operation of same |
| JP2019171507A (ja) * | 2018-03-28 | 2019-10-10 | Ntn株式会社 | 複合作業装置 |
| JP2020011326A (ja) * | 2018-07-17 | 2020-01-23 | ファナック株式会社 | ロボットシステム |
| US12030187B2 (en) | 2018-07-17 | 2024-07-09 | Fanuc Corporation | Robot system |
| CN109240092A (zh) * | 2018-11-30 | 2019-01-18 | 长春工业大学 | 基于多智能体可重构模块化柔性机械臂轨迹跟踪控制方法 |
| US12017364B2 (en) | 2019-04-17 | 2024-06-25 | Realtime Robotics, Inc. | Motion planning graph generation user interface, systems, methods and articles |
| JP7332199B2 (ja) | 2019-06-24 | 2023-08-23 | リアルタイム ロボティクス, インコーポレーテッド | 共用ワークスペースにおける複数のロボットの動作計画 |
| JP2022539324A (ja) * | 2019-06-24 | 2022-09-08 | リアルタイム ロボティクス, インコーポレーテッド | 共用ワークスペースにおける複数のロボットの動作計画 |
| CN112140102A (zh) * | 2020-06-08 | 2020-12-29 | 深圳市越疆科技有限公司 | 一种工业机器人的避障方法、装置和系统 |
| CN112450807A (zh) * | 2020-11-06 | 2021-03-09 | 苏宁智能终端有限公司 | 扫地机器人障碍物移除操控方法、装置及系统 |
| CN113211443A (zh) * | 2021-05-18 | 2021-08-06 | 广州市香港科大霍英东研究院 | 一种协作机器人柔顺控制方法、系统及装置 |
| WO2023162300A1 (ja) * | 2022-02-28 | 2023-08-31 | 株式会社日立製作所 | 軌道計画装置及び軌道計画方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190143518A1 (en) | 2019-05-16 |
| US20170210008A1 (en) | 2017-07-27 |
| US11161247B2 (en) | 2021-11-02 |
| JP6576255B2 (ja) | 2019-09-18 |
| EP3195990A1 (en) | 2017-07-26 |
| US10207406B2 (en) | 2019-02-19 |
| EP3195990B1 (en) | 2023-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6576255B2 (ja) | ロボット軌道生成方法、ロボット軌道生成装置、および製造方法 | |
| JP7222803B2 (ja) | 軌道計画装置、軌道計画方法及びプログラム | |
| JP6750909B2 (ja) | ロボット軌道生成方法、ロボット軌道生成装置、および製造方法 | |
| US11458626B2 (en) | Trajectory generating method, and trajectory generating apparatus | |
| US20180036882A1 (en) | Layout setting method and layout setting apparatus | |
| JP7439206B2 (ja) | 情報処理方法、情報処理装置、プログラム、記録媒体、生産システム、ロボットシステム、物品の製造方法 | |
| CN102216037B (zh) | 用于优化工业机器人的编程移动路径的方法和装置 | |
| JP6567101B2 (ja) | 教示方法、ロボットの動作方法、プログラム、記憶媒体、教示装置 | |
| EP2923805A2 (en) | Object manipulation driven robot offline programming for multiple robot system | |
| US11975451B2 (en) | Simulation-in-the-loop tuning of robot parameters for system modeling and control | |
| JP7262373B2 (ja) | 軌道計画生成装置、軌道計画生成方法、および軌道計画生成プログラム | |
| JP2016093869A (ja) | 教示データの作成方法、作成装置、及び作成プログラム、並びに、教示データのデータ構造、記録媒体 | |
| JP7210201B2 (ja) | 情報処理方法、プログラム、記録媒体、情報処理装置、ロボットシステム、物品の製造方法 | |
| CN113650011A (zh) | 一种机械臂拼接路径规划方法及装置 | |
| JP2022076814A (ja) | プログラム生成システム、ロボットシステム、プログラム生成方法、および生成プログラム | |
| JP6819766B1 (ja) | シミュレーションシステム、シミュレーション方法、シミュレーションプログラム、ロボットの製造方法、およびロボットシステム | |
| JP2021082222A (ja) | 情報処理方法、ロボットシステム、物品の製造方法、および情報処理装置 | |
| JP6862849B2 (ja) | 演算装置、演算方法、演算プログラムおよびロボットシステム | |
| JP7232704B2 (ja) | ロボットプログラム評価装置、ロボットプログラム評価方法及びロボットプログラム評価プログラム | |
| JP7424122B2 (ja) | シミュレーション装置およびプログラム | |
| WO2023276149A1 (ja) | 最適化支援装置 | |
| JP7276359B2 (ja) | 動作指令生成装置、機構制御システム、コンピュータプログラム、動作指令生成方法及び機構制御方法 | |
| WO2023276506A1 (ja) | プランニングシステム、ロボットシステム、プランニング方法、およびプランニングプログラム | |
| WO2023079809A1 (ja) | 軌道計画装置、軌道計画方法および軌道計画プログラム | |
| JP2023175199A (ja) | 学習装置、制御装置、ロボットシステム、学習方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190116 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190116 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20190116 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190422 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190528 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190711 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190723 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190820 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6576255 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |