JP2017128308A - 車両用制御システム - Google Patents
車両用制御システム Download PDFInfo
- Publication number
- JP2017128308A JP2017128308A JP2016010889A JP2016010889A JP2017128308A JP 2017128308 A JP2017128308 A JP 2017128308A JP 2016010889 A JP2016010889 A JP 2016010889A JP 2016010889 A JP2016010889 A JP 2016010889A JP 2017128308 A JP2017128308 A JP 2017128308A
- Authority
- JP
- Japan
- Prior art keywords
- program
- electronic control
- control unit
- vehicle
- ecu
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012545 processing Methods 0.000 claims abstract description 86
- 230000008859 change Effects 0.000 claims description 31
- 230000004044 response Effects 0.000 claims description 8
- 230000006870 function Effects 0.000 description 65
- 238000000034 method Methods 0.000 description 35
- 230000005540 biological transmission Effects 0.000 description 28
- 230000008569 process Effects 0.000 description 27
- 238000004891 communication Methods 0.000 description 22
- 238000007726 management method Methods 0.000 description 21
- 230000006399 behavior Effects 0.000 description 19
- 230000007246 mechanism Effects 0.000 description 13
- 230000005856 abnormality Effects 0.000 description 12
- 230000033001 locomotion Effects 0.000 description 12
- 230000001172 regenerating effect Effects 0.000 description 12
- 238000001514 detection method Methods 0.000 description 11
- 238000012508 change request Methods 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 239000000446 fuel Substances 0.000 description 5
- 238000002347 injection Methods 0.000 description 5
- 239000007924 injection Substances 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 3
- 239000002131 composite material Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000013468 resource allocation Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 238000012795 verification Methods 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 238000007664 blowing Methods 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/44—Arrangements for executing specific programs
- G06F9/455—Emulation; Interpretation; Software simulation, e.g. virtualisation or emulation of application or operating system execution engines
Landscapes
- Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Stored Programmes (AREA)
Abstract
Description
車両に搭載された車載機器(31〜33)を制御するために、第1の電子制御装置(40)と第2の電子制御装置(60、70、80)とが連携した処理を行うものであって、
第1の電子制御装置と第2の電子制御装置とは、それぞれ、連携処理を行うための連携処理用アプリケーションプログラム(41a、61a、71a、81a)を有するとともに、それら連携処理用アプリケーションプログラムを協調して実行させるためのベーシックソフトウエアとしての役割を果たす、所定の役割分担の下に協調して動作する第1OSプログラム(41b)と第2OSプログラム(61b、71b、81b)とをそれぞれ有しており、
第2の電子制御装置が保有する第2OSプログラムは、分担する役割が異なる複数の中から選定されたものであり、
第1の電子制御装置が保有する第1OSプログラムは、分担する役割を変更可能に構成され、それにより、分担する役割が異なる複数の中のいずれの第2OSプログラムとも協調した動作を行うことが可能であって、
第1の電子制御装置は、
第2の電子制御装置から、第2OSプログラムが分担する役割についての情報を取得する取得部(S100)と、
取得部により取得した、第2OSプログラムが分担する役割を示す情報に基づき、当該第2OSプログラムと協調して動作することができるように、第1OSプログラムの分担する役割を決定する決定部(S120)と、を備える。
Claims (6)
- 車両に搭載された車載機器(31〜33)を制御するために、第1の電子制御装置(40)と第2の電子制御装置(60、70、80)とが連携した処理を行う車両用制御システムであって、
前記第1の電子制御装置と前記第2の電子制御装置とは、それぞれ、連携処理を行うための連携処理用アプリケーションプログラム(41a、61a、71a、81a)を有するとともに、それら連携処理用アプリケーションプログラムを協調して実行させるためのベーシックソフトウエアとしての役割を果たす、所定の役割分担の下に協調して動作する第1OSプログラム(41b)と第2OSプログラム(61b、71b、81b)とをそれぞれ有しており、
前記第2の電子制御装置が保有する第2OSプログラムは、分担する役割が異なる複数の中から選定されたものであり、
前記第1の電子制御装置が保有する第1OSプログラムは、分担する役割を変更可能に構成され、それにより、分担する役割が異なる複数の中のいずれの第2OSプログラムとも協調した動作を行うことが可能であって、
前記第1の電子制御装置は、
前記第2の電子制御装置から、前記第2OSプログラムが分担する役割についての情報を取得する取得部(S100)と、
前記取得部により取得した、前記第2OSプログラムが分担する役割を示す情報に基づき、当該第2OSプログラムと協調して動作することができるように、第1OSプログラムの分担する役割を決定する決定部(S120)と、を備える車両用制御システム。 - オペレーティングシステムの役割として複数の項目があり、前記第1OSプログラムと前記第2OSプログラムとは、前記複数の項目について、それぞれ役割分担が定められており、
前記第1の電子制御装置は、
前記第2の電子制御装置に対して、特定の項目に関して伝達する情報の変更を通知する変更通知部(S140)と、
前記変更通知部の変更指示に対応するように、前記特定の項目に関して前記第1OSプログラムが伝達する情報を変更する変更部(S150)と、を有する請求項1に記載の車両用制御システム。 - オペレーティングシステムの役割として複数の項目があり、前記第1OSプログラムと前記第2OSプログラムとは、前記複数の項目について、それぞれ役割分担が定められており、
前記第2の電子制御装置は、
前記第1の電子制御装置に対して、特定の項目の動作条件の変更要求を行う変更指示部(S240)を有し、
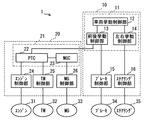
前記第1の電子制御装置は、前記変更指示部からの変更指示に応じて、前記特定の項目の前記第1OSプログラムの動作条件を変更する動作条件変更部(S170)を有する請求項1に記載の車両用制御システム。 - 前記車両用制御システムは、複数の車載機器を制御するための複数の機器制御部(24〜26)と、複数の前記機器制御部の制御を統括するドメイン制御部(21〜23)とに階層化され、
前記第1の電子制御装置は、前記ドメイン制御部が実装されたものであり、
前記第2の電子制御装置は、前記機器制御部が実装されたものである請求項1乃至3のいずれかに記載の車両用制御システム。 - 前記車両用制御システムは、複数の車載機器を制御するための複数の機器制御部(24〜26)と、複数の前記機器制御部の制御を統括するドメイン制御部(21〜23)とに階層化され、
前記ドメイン制御部は、少なくとも2つの電子制御装置により構成され、
前記第1の電子制御装置及び前記第2の電子制御装置は、前記ドメイン制御部を構成する少なくとも2つの電子制御装置である請求項1乃至3のいずれかに記載の車両用制御システム。 - 前記車両用制御システムは、複数の車載機器を制御するための複数の機器制御部(24〜26)と、複数の前記機器制御部の制御を統括するドメイン制御部(21〜23)とに階層化され、
さらに、前記ドメイン制御部の上位に位置付けられ、当該ドメイン制御部に対して制御指示を行う上位制御部(13)を備え、
前記第1の電子制御装置は、前記上位制御部が実装されたものであり、
前記第2の電子制御装置は、前記ドメイン制御部が実装されたものである請求項1乃至3のいずれかに記載の車両用制御システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016010889A JP6504065B2 (ja) | 2016-01-22 | 2016-01-22 | 車両用制御システム |
| DE102017200286.7A DE102017200286A1 (de) | 2016-01-22 | 2017-01-10 | Fahrzeugsteuersystem |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016010889A JP6504065B2 (ja) | 2016-01-22 | 2016-01-22 | 車両用制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017128308A true JP2017128308A (ja) | 2017-07-27 |
| JP6504065B2 JP6504065B2 (ja) | 2019-04-24 |
Family
ID=59296106
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016010889A Active JP6504065B2 (ja) | 2016-01-22 | 2016-01-22 | 車両用制御システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6504065B2 (ja) |
| DE (1) | DE102017200286A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019155966A1 (ja) * | 2018-02-08 | 2019-08-15 | 日立オートモティブシステムズ株式会社 | コンピュータプログラム製品、演算装置 |
| JPWO2021010224A1 (ja) * | 2019-07-12 | 2021-01-21 | ||
| JP2021103484A (ja) * | 2019-12-25 | 2021-07-15 | 株式会社デンソー | 車両用制御システムおよび車両制御装置 |
| US11347892B2 (en) * | 2019-11-27 | 2022-05-31 | AO Kaspersky Lab | System and method for access control in electronic control units of vehicles |
| US20220245266A1 (en) * | 2019-11-27 | 2022-08-04 | AO Kaspersky Lab | System and method for providing a security policy |
| WO2023281784A1 (ja) * | 2021-07-05 | 2023-01-12 | 日立Astemo株式会社 | 電子制御装置及び車載システム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000257501A (ja) * | 1999-03-10 | 2000-09-19 | Denso Corp | 自動車用制御装置 |
| US20020099484A1 (en) * | 2000-06-20 | 2002-07-25 | Hitachi, Ltd. | Vehicle travel control apparatus |
| JP2006142994A (ja) * | 2004-11-19 | 2006-06-08 | Denso Corp | 車両用ネットワークシステムおよび電子制御装置 |
| JP2008301600A (ja) * | 2007-05-30 | 2008-12-11 | Sanyo Electric Co Ltd | 電動車輌の分散制御システム |
| JP2009056817A (ja) * | 2007-08-29 | 2009-03-19 | Denso Corp | 車載電子機器制御システム |
| JP2009129083A (ja) * | 2007-11-21 | 2009-06-11 | Denso Corp | 車両制御装置およびそれを用いた車両制御システム |
| JP2012218621A (ja) * | 2011-04-12 | 2012-11-12 | Denso Corp | 車載用電子制御装置 |
-
2016
- 2016-01-22 JP JP2016010889A patent/JP6504065B2/ja active Active
-
2017
- 2017-01-10 DE DE102017200286.7A patent/DE102017200286A1/de active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000257501A (ja) * | 1999-03-10 | 2000-09-19 | Denso Corp | 自動車用制御装置 |
| US20020099484A1 (en) * | 2000-06-20 | 2002-07-25 | Hitachi, Ltd. | Vehicle travel control apparatus |
| JP2006142994A (ja) * | 2004-11-19 | 2006-06-08 | Denso Corp | 車両用ネットワークシステムおよび電子制御装置 |
| JP2008301600A (ja) * | 2007-05-30 | 2008-12-11 | Sanyo Electric Co Ltd | 電動車輌の分散制御システム |
| JP2009056817A (ja) * | 2007-08-29 | 2009-03-19 | Denso Corp | 車載電子機器制御システム |
| JP2009129083A (ja) * | 2007-11-21 | 2009-06-11 | Denso Corp | 車両制御装置およびそれを用いた車両制御システム |
| JP2012218621A (ja) * | 2011-04-12 | 2012-11-12 | Denso Corp | 車載用電子制御装置 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019155966A1 (ja) * | 2018-02-08 | 2019-08-15 | 日立オートモティブシステムズ株式会社 | コンピュータプログラム製品、演算装置 |
| JP2019139453A (ja) * | 2018-02-08 | 2019-08-22 | 日立オートモティブシステムズ株式会社 | ハイパーバイザ、演算装置 |
| JPWO2021010224A1 (ja) * | 2019-07-12 | 2021-01-21 | ||
| WO2021010224A1 (ja) * | 2019-07-12 | 2021-01-21 | 日立オートモティブシステムズ株式会社 | セキュリティ処理装置 |
| JP7177272B2 (ja) | 2019-07-12 | 2022-11-22 | 日立Astemo株式会社 | セキュリティ処理装置 |
| US11347892B2 (en) * | 2019-11-27 | 2022-05-31 | AO Kaspersky Lab | System and method for access control in electronic control units of vehicles |
| US20220245266A1 (en) * | 2019-11-27 | 2022-08-04 | AO Kaspersky Lab | System and method for providing a security policy |
| US11640481B2 (en) * | 2019-11-27 | 2023-05-02 | AO Kaspersky Lab | System and method for providing a security policy |
| JP2021103484A (ja) * | 2019-12-25 | 2021-07-15 | 株式会社デンソー | 車両用制御システムおよび車両制御装置 |
| JP7310597B2 (ja) | 2019-12-25 | 2023-07-19 | 株式会社デンソー | 車両用制御システムおよび車両制御装置 |
| WO2023281784A1 (ja) * | 2021-07-05 | 2023-01-12 | 日立Astemo株式会社 | 電子制御装置及び車載システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6504065B2 (ja) | 2019-04-24 |
| DE102017200286A1 (de) | 2017-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6504065B2 (ja) | 車両用制御システム | |
| JP4059194B2 (ja) | 車両の統合制御システム | |
| US8442699B2 (en) | Vehicle integrated control system | |
| Fijalkowski | Automotive mechatronics: operational and practical issues: volume I | |
| JP4225025B2 (ja) | 車両統合制御システム | |
| US20070142987A1 (en) | Vehicle integrated control system | |
| WO2004000598A1 (ja) | 車両制御情報伝達構造、この伝達構造を用いた車両制御装置、およびこの伝達構造を用いた車両制御シミュレータ | |
| JP6583182B2 (ja) | 車両用制御システム | |
| JP6477430B2 (ja) | 電子制御装置 | |
| JP2007253792A (ja) | 車両用電子制御装置のソフトウェアシステムおよびその設計方法 | |
| JP6848392B2 (ja) | 車両用制御システム | |
| CN113895448B (zh) | 域控制器间的协同交互控制架构及其控制方法 | |
| JP2009137582A (ja) | 車両の統合制御システム | |
| JP2017105362A (ja) | 制御システム | |
| CN108657087A (zh) | 车辆的底盘控制系统 | |
| US11780500B2 (en) | Control device, manager, method, non-transitory storage medium, and vehicle | |
| JP6398864B2 (ja) | 制御システム | |
| JP7396429B2 (ja) | 制御装置、制駆動力制御システム、方法、およびプログラム | |
| JP6406082B2 (ja) | 制御システム | |
| CN219687244U (zh) | 一种控制器及车辆 | |
| JP2017030633A (ja) | 制御システム | |
| WO2022259655A1 (ja) | 車両制御装置および車両制御システム | |
| Yoshimura et al. | Cost-Effective and Fault Tolerant Vehicle Control Architecture for X-by-Wire Systems (Part 1: Architecture Design Based on the Concept of Autonomous Decentralized Systems) | |
| Isermann | Automotive Control | |
| Pan-Ngum | Alternative vehicle electronic architecture for individual wheel control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180413 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190311 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6504065 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |