JP2017111068A - 光エンコーダ - Google Patents
光エンコーダ Download PDFInfo
- Publication number
- JP2017111068A JP2017111068A JP2015247013A JP2015247013A JP2017111068A JP 2017111068 A JP2017111068 A JP 2017111068A JP 2015247013 A JP2015247013 A JP 2015247013A JP 2015247013 A JP2015247013 A JP 2015247013A JP 2017111068 A JP2017111068 A JP 2017111068A
- Authority
- JP
- Japan
- Prior art keywords
- pattern
- photodetector
- photodetectors
- incremental
- scale
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 41
- 238000001514 detection method Methods 0.000 claims abstract description 43
- 230000000737 periodic effect Effects 0.000 claims description 19
- 125000004122 cyclic group Chemical group 0.000 abstract 3
- 238000006243 chemical reaction Methods 0.000 description 12
- 238000000034 method Methods 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 6
- 239000011347 resin Substances 0.000 description 4
- 229920005989 resin Polymers 0.000 description 4
- 239000000758 substrate Substances 0.000 description 4
- 230000003321 amplification Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000003199 nucleic acid amplification method Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
Images






Landscapes
- Optical Transform (AREA)
Abstract
Description
前記インクリメンタルパターンを検出する光検出器は、一定周期を有する明暗パターンの90度ずつ位相の異なる4つの位相部分を検出可能なように、各位相部分に対応させた4つの光検出器を周期的に配列してなり、前記インデックスパターンを検出する光検出器は、8個の光検出器を3個、1個、1個、3個の第1〜第4の4グループに分けて、前記インクリメンタルパターン検出用光検出器の連続する任意の4個のうち1番目、2番目、4番目の光検出器を前記第1グループの光検出器に置き換え、続く4個のうち3番目の光検出器を前記第2グループの光検出器に置き換え、続く4個のうち3番目の光検出器を前記第3グループの光検出器に置き換え、続く4個のうち1番目、2番目、4番目の光検出器を前記第4グループの光検出器に置き換えてなり、前記信号処理回路は、前記8個のインデックスパターン検出用光検出器の各検出信号を電圧変換した上、第1,第4グループの各検出信号を差動増幅して得た差分信号を基準信号と比較して生成したパルス信号と、第2,第3グループの各検出信号を差動増幅して得た差分信号を前記第1,第4グループの差分信号と比較して生成したパルス信号とを論理演算して基準位置信号とするものである。
2 スケール
3 PCB基板
4 光源
5 IC
6 光検出器
6A PDアレイ
6Z インデックスパターン検出用光検出器
7 スリット
8 透明樹脂
9a,11a 反射部
9b,11b 非反射部
10a 遮光部
10b 透過部
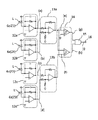
12a,12b,12c,12d 電流電圧変換回路
13a,13b 差動増幅回路
14 比較回路
15 AND回路
16 出力端子
Claims (2)
- 光を出射する光源と、光学的パターンが形成されて前記光源に対して相対的に移動可能なスケールと、前記光源から出射されて前記光学的パターンを経由した光を検出する光検出器を備えた光エンコーダであって、前記スケールの光学的パターンは、前記スケールの移動方向に反射部と非反射部とを交互に配列してなる周期的なインクリメンタルパターンの中に、非周期的なインデックスパターンを少なくとも一つ配置してなり、前記光検出器は、前記インクリメンタルパターンを検出する光検出器と、前記インクリメンタルパターンを検出する光検出器に挟まれた1個、及び隣接した2個の前記インデックスパターンを検出する光検出器を、前記スケールの移動方向に一定のパターンで配列してなる一方、前記インデックスパターンを検出する光検出器の検出信号に基づいて基準位置信号を生成する信号処理回路を有することを特徴とする光エンコーダ。
- 前記非周期的なインデックスパターンは、前記インクリメンタルパターンの反射部に挟まれるようにして、非反射部、反射部、非反射部をほぼ1対3対1の幅で、かつ前記各非反射部の幅は前記インクリメンタルパターンの反射部とほぼ同一幅として配置してなり、
または、前記非周期的なインデックスパターンは、前記インクリメンタルパターンの非反射部に挟まれるようにして、反射部、非反射部、反射部をほぼ1対3対1の幅で、かつ前記各反射部の幅は前記インクリメンタルパターンの非反射部とほぼ同一幅として配置してなり、
前記インクリメンタルパターンを検出する光検出器は、一定周期を有する明暗パターンの90度ずつ位相の異なる4つの位相部分を検出可能なように、各位相部分に対応させた4つの光検出器を周期的に配列してなり、前記インデックスパターンを検出する光検出器は、8個の光検出器を3個、1個、1個、3個の第1〜第4の4グループに分けて、前記インクリメンタルパターン検出用光検出器の連続する任意の4個のうち1番目、2番目、4番目の光検出器を前記第1グループの光検出器に置き換え、続く4個のうち3番目の光検出器を前記第2グループの光検出器に置き換え、続く4個のうち3番目の光検出器を前記第3グループの光検出器に置き換え、続く4個のうち1番目、2番目、4番目の光検出器を前記第4グループの光検出器に置き換えてなり、
前記信号処理回路は、前記8個のインデックスパターン検出用光検出器の各検出信号を電圧変換した上、第1,第4グループの各検出信号を差動増幅して得た差分信号を基準信号と比較して生成したパルス信号と、第2,第3グループの各検出信号を差動増幅して得た差分信号を前記第1,第4グループの差分信号と比較して生成したパルス信号とを論理演算して基準位置信号とすることを特徴とする請求項1記載の光エンコーダ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015247013A JP6684087B2 (ja) | 2015-12-18 | 2015-12-18 | 光エンコーダ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015247013A JP6684087B2 (ja) | 2015-12-18 | 2015-12-18 | 光エンコーダ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017111068A true JP2017111068A (ja) | 2017-06-22 |
| JP6684087B2 JP6684087B2 (ja) | 2020-04-22 |
Family
ID=59081292
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015247013A Active JP6684087B2 (ja) | 2015-12-18 | 2015-12-18 | 光エンコーダ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6684087B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11353342B2 (en) | 2017-03-07 | 2022-06-07 | Renishaw Plc | Shadow-cast encoder apparatus with scale and readhead producing a fringe pattern on the detector with a specific harmonic distortion |
| WO2023028967A1 (zh) * | 2021-09-02 | 2023-03-09 | 北京精雕科技集团有限公司 | 绝对式位置测量装置 |
-
2015
- 2015-12-18 JP JP2015247013A patent/JP6684087B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11353342B2 (en) | 2017-03-07 | 2022-06-07 | Renishaw Plc | Shadow-cast encoder apparatus with scale and readhead producing a fringe pattern on the detector with a specific harmonic distortion |
| WO2023028967A1 (zh) * | 2021-09-02 | 2023-03-09 | 北京精雕科技集团有限公司 | 绝对式位置测量装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6684087B2 (ja) | 2020-04-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7663093B2 (en) | Absolute position encoder having a second incremental track integrated with the absolute track | |
| US20080252906A1 (en) | Absolute position length-measurement type encoder | |
| JP5887064B2 (ja) | 光学式エンコーダ | |
| JP2009198318A (ja) | 光電式エンコーダ | |
| JP6437802B2 (ja) | 光学式エンコーダ | |
| JP5595148B2 (ja) | アブソリュートエンコーダ | |
| US9557193B2 (en) | Optical encoder | |
| JP2010048607A (ja) | 光電式エンコーダ | |
| JP2011164029A (ja) | 光電式エンコーダ | |
| US8097842B2 (en) | High resolution single track optical encoder | |
| JP2008083019A (ja) | 光電式エンコーダおよびそれを用いた電子機器 | |
| JP2011220864A (ja) | 光学式基準位置検出型エンコーダ | |
| JP6684087B2 (ja) | 光エンコーダ | |
| CN103090799B (zh) | 位移检测装置和位移检测方法 | |
| JP5553669B2 (ja) | 光学式絶対位置測長型エンコーダ | |
| JP2013036945A (ja) | 光学式エンコーダの原点検出方法 | |
| JP2003161645A (ja) | 光学式エンコーダ | |
| JPS60230018A (ja) | 光電型エンコ−ダの基準位置検出装置 | |
| US8723103B2 (en) | Optical encoder readhead configured to block stray light with dummy vias | |
| JP5747342B2 (ja) | 光学式エンコーダ | |
| JP5979033B2 (ja) | エンコーダ | |
| US20140353477A1 (en) | Optical encoder | |
| JP2009047595A (ja) | 絶対位置測長型エンコーダ | |
| US20140339404A1 (en) | Reference signal generation apparatus and reference signal generation system | |
| JP2014106210A (ja) | アブソリュートエンコーダ及び絶対位置を求める方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181011 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190904 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191028 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200311 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200327 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6684087 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |