JP2017106834A - 方向推定装置 - Google Patents
方向推定装置 Download PDFInfo
- Publication number
- JP2017106834A JP2017106834A JP2015241505A JP2015241505A JP2017106834A JP 2017106834 A JP2017106834 A JP 2017106834A JP 2015241505 A JP2015241505 A JP 2015241505A JP 2015241505 A JP2015241505 A JP 2015241505A JP 2017106834 A JP2017106834 A JP 2017106834A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- estimation
- representative value
- vehicle
- types
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Landscapes
- Traffic Control Systems (AREA)
Abstract
Description
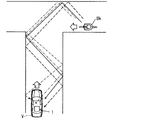
以下、本発明の実施形態について図を用いて説明する。図1は、本実施形態に係る方向推定システム100の概略的な構成の一例を示す図である。方向推定システム100は、図1に示すように、車両側ユニット1と自転車側ユニット2を備える。車両側ユニット1は、車両で用いられるデバイスであり、自転車側ユニット2は自転車に取り付けられて用いられるデバイスである。便宜上以降では、車両側ユニット1が用いられている車両を自車両と記載するとともに、自転車側ユニット2が取り付けられている自転車のことを搭載自転車とも記載する。
まずは、自転車側ユニット2の構成について述べる。自転車側ユニット2は、図1に示すように、アンテナ21、送信部22、及び通信制御部23を備える。
次に、車両側ユニット1の構成について述べる。便宜上、車両側ユニット1が搭載されている車両を自車両とも記載する。車両側ユニット1は、図1に示すように、複数のアンテナ11A〜Dと、複数のアンテナ11A〜Dのそれぞれに対応する複数の受信部12A〜Dと、方向推定部13と、報知処理部14と、報知装置15と、を備える。なお、以降においてアンテナ11A〜Dのそれぞれを区別しない場合には、それらの総称としてアンテナ11と記載する。受信部12A〜Dについても同様に受信部12とも記載する。
ここではパラメータ学習処理について述べる。このパラメータ学習処理は、例えば、方向推定システム100の設計者や管理者等によって実施される。また、製品の設計や製造段階だけでなく、工場出荷後においてディーラーショップ等で実施されても良い。以下、パラメータ学習処理の具体的な手順について述べる。
・X1=(RA+RB)>(RC+RD)
・X2=RA>(RB+RD)
・X3=(RB+RD)>RC
・X4=RA>RC
・X5=RB>RD
・X6=RA>RD
・X7=RB>RC
各要素の値は、右辺の比較の結果が真であれば1に、偽であれば0に設定する。ここでは一例として何れの要素も、自車両から見て右側前方の見通し外に自転車側ユニット2に存在する場合に、比較結果が真となって1が設定されるように定義している。なお、RA+RBや、RC+RD、RB+RD等が請求項に記載の合成受信強度に相当する。

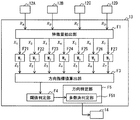
次に、方向推定部13の構成及び作動について図6を用いて説明する。図6に示すように方向推定部13は、特徴量抽出部F1、重み付け部F2、方向指標値算出部F3、閾値判定部F4、方向特定部F5を備える。
以上の構成では、それぞれ自車両において異なる位置に設けられている4つのアンテナ11A〜Dでの受信強度RA,RB,RC,RDに基づいて、7種類の特徴量(つまり、要素X1〜X7)を抽出する。また、各要素X1〜X7を、各要素に対応する重み係数W1〜W7及びバイアス係数Bを用いて重み付け線形結合させることで、1つの値である方向指標値Yに帰結させる。そして、方向指標値Yと、予め機械学習によって決定しておいた閾値Ythとを比較することで、搭載自転車が自車両にとって見通し外右側に存在するのか、見通し外左側に存在するのかを推定する。
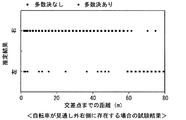
車両側ユニット1が備えるアンテナ11A〜Dと、自転車側ユニット2のアンテナ21は、アンテナ偏波が互いに直交するような構成となっていても良い。例えば、車両側ユニット1が備えるアンテナ11A〜Dの偏波面を垂直偏波とし、自転車側ユニット2のアンテナ21が信号送信に用いる偏波面を水平偏波としてもよい。もちろん、車両側ユニット1が備えるアンテナ11A〜Dの偏波面を水平偏波とし、自転車側ユニット2のアンテナ21の偏波面を垂直偏波としてもよい。そのように、車両側ユニット1と自転車側ユニット2とが送受信の対象とする偏波面を互いに直交させることで、図7、図8に示すように推定精度を向上させることができる。
上述した実施形態では、方向特定部F5は、閾値判定部F4による1回の比較結果に基づいて、自転車側ユニット2が存在する方向を推定する態様を例示したが、これに限らない。
図12に示すように、方向推定システム100は、種々のパラメータを管理するセンタ3を備え、車両側ユニット1での推定結果及びその推定に用いた特徴量データ等をセンタ3にフィードバックすることで、より適切なパラメータを学習させる態様としてもよい。そのような態様を変形例3とし、以下、この変形例3の具体的な構成の一例について述べる。
上述したセンタ3による推定パラメータの更新機能は、車両側ユニット1自身が備えていても良い。つまり、報知処理部14が報知処理を実施している状態において、車両側制御部19がドライバによる急なブレーキ操作を検出した場合には、その報知処理の元となった推定結果は誤推定であったと見なして、メモリ等に保存する。そして、その保存した特徴量データを訓練データとした機械学習処理を実行することで、当該特徴量データに基づいた推定結果が正しい推定結果となる推定用パラメータを算出し、パラメータ記憶部131に格納する。つまり、パラメータ記憶部131が記憶する推定用パラメータを更新する。なお、この変形例4における車両側ユニットは、機械学習処理を実行するための機能を備えているものとする。
報知処理部14は、各アンテナ11での受信強度RA,RB,RC,RDに基づいて報知処理の要否を判定してもよい。自転車側ユニット2との距離(以降、端末間距離)が小さいほど受信強度は大きくなる傾向がある。つまり、受信強度がある程度小さいということは、自転車側ユニット2は相対的に遠方に存在することを意味する。
また、先に述べた変形例4において、報知処理部14は、図15に示すように外乱判定部G3を備えていても良い。外乱判定部G3は、外乱の有無を判定する機能ブロックである。外乱判定部G3は、受信強度評価部G1から提供される代表値Rrepを、一定時間分、時系列順に保持する。各時点における代表値Rrepは、その代表値Rrepを特定した時点における位置情報と対応付けて保存される。
なお、各アンテナ11での受信強度から定まる情報として、どのような情報を特徴量として採用するかは、前述の実施形態で例示した態様に限らない。また、特徴ベクトルが備える要素の数は、7つに限らない。例えば、受信強度そのものを特徴ベクトルの要素として採用してもよい。また、現在から一定時間以内にサンプリングした受信強度を母集団として定まる分散を、特徴ベクトルの要素として用いても良い。
車両側ユニット1が備えるアンテナ11の配置は図2に示す構成に限らない。また、車両側ユニット1が備えるアンテナ11の数も4つに限らない。車両側ユニット1は、自車両における受信位置及び受信方向の少なくとも何れか一方が異なる、少なくとも3種類の受信強度を取得できる構成となっていればよい。自車両における受信位置及び受信方向の組み合わせが請求項に記載の受信パターンに相当する。
以上では、車両側ユニット1が、自車両の前方の見通し外のうち、搭載自転車が存在する方向(つまり左側か右側)を推定する態様を例示したが、これに限らない。例えば、車両側ユニット1は、自車両の後方の見通し外のうち、搭載自転車が存在する方向(つまり左側か右側)を推定しても良い。その場合には、自車両後方の見通し外に搭載自転車が存在する状況を想定した訓練データに基づいて、推定用パラメータを予め決定すれば良い。
以上では、信号の送信元となる移動体が自転車である態様を例示したが、これに限らない。信号の送信元となる移動体は、歩行者であっても良いし、他車両であってもよい。
Claims (11)
- 移動体で用いられ、
所定の周波数帯の電波を受信するための少なくとも1つのアンテナ(11A〜D)と、
少なくとも1つの前記アンテナを介して、少なくとも3種類の受信パターンの受信信号強度を取得する受信強度取得部(12A〜D)と、
前記受信強度取得部が取得した3種類の前記受信パターンの受信信号強度を用いて、前記電波の送信元としての送信元端末が、前記移動体から見て見通し外の左側に存在するか右側に存在するかを推定するための複数種類の特徴量を抽出する特徴量抽出部(F1)と、
前記移動体から見て前記送信元端末が見通し外の左側に存在するか右側に存在するかを、複数種類の前記特徴量に基づいて推定するための推定用パラメータを記憶するパラメータ記憶部(131)と、
前記パラメータ記憶部が記憶している前記推定用パラメータと、複数種類の前記特徴量を用いて、前記移動体から見て前記送信元端末が見通し外の左側に存在するか右側に存在するかを推定する方向推定部(F5)と、を備え、
複数種類の前記受信パターンは、前記移動体における前記アンテナの設置位置と前記アンテナの受信方向の2つの要素のうちの少なくとも何れか一方がそれぞれ異なるものであり、
複数種類の前記特徴量はいずれもスカラー量であり、
前記推定用パラメータは、
訓練データとして収集された複数種類の前記特徴量を示すデータを元に所定の機械学習アルゴリズムによって算出されたものであって、
複数種類の前記特徴量のそれぞれに対応する複数の重み係数と、
複数種類の前記特徴量のそれぞれに、その特徴量に対応する前記重み係数を乗算した値の総和から減算することによって、当該総和を前記送信元端末が前記移動体から見て見通し外の左側に存在するか右側に存在するかを示す方向指標値に変換するバイアス係数と、
前記方向指標値との比較結果が、前記送信元端末が前記移動体から見て見通し外の左側に存在するか右側に存在するかを示す方向推定用閾値と、を備え、
前記方向推定部は、
前記特徴量抽出部が抽出した複数種類の前記特徴量のそれぞれに、その特徴量に対応する前記重み係数を乗算した値の総和から前記バイアス係数を減算することで前記方向指標値を算出し、
前記方向指標値と前記方向推定用閾値とを比較することで前記移動体から見て前記送信元端末が見通し外の左側に存在するか右側に存在するかを推定することを特徴とする方向推定装置。 - 請求項1において、
前記方向推定部は、
所定回数分の推定結果を保持し、
前記所定回数分の推定結果のうち、相対的に多数となっている方向に前記送信元端末が存在すると推定することを特徴とする方向推定装置。 - 請求項1又は2において、
前記アンテナは、所定の通信装置から特定の偏波面で送信される信号を受信するためのものであって、
前記アンテナが受信対象とする偏波面は、前記通信装置が信号送信に用いる偏波面と直交するように構成されていることを特徴とする方向推定装置。 - 請求項1から3の何れか1項において、
前記特徴量は、複数種類の前記受信信号強度、及び、それらの一部を加算することで求まる合成受信強度を、所定の組み合わせで比較した結果を2値化したものであることを特徴とする方向推定装置。 - 請求項1から4の何れか1項において、
前記移動体は車両であって、
前記方向推定部の推定結果を前記車両の乗員に報知する報知処理を実施する報知処理部(14)を備えることを特徴とする方向推定装置。 - 請求項5において、
前記車両のドライバが急なブレーキ操作を実施したか否かを判断するために用いられる物理状態量を取得する物理状態量取得部(16)と、
前記物理状態量取得部が取得している前記物理状態量に基づいて、前記ドライバが急なブレーキ操作を実施したか否かを判断する判断部(19)と、を備え、
前記報知処理部が報知処理を実施している状態において、前記ドライバが急なブレーキ操作を実施したと判定した場合には、その報知処理の元となった推定結果は誤推定であったと見なして、当該推定に用いた前記特徴量に基づいた推定結果が正しい推定結果となるように前記推定用パラメータを更新することを特徴とする方向推定装置。 - 請求項5において、
前記車両の外部に設けられており、前記機械学習アルゴリズムに則った演算処理を実施することで前記訓練データから前記推定用パラメータを算出する機能を有するセンタと通信を実施するための無線通信部(18)と、
前記車両のドライバが急なブレーキ操作を実施したか否かを判断するために用いられる物理状態量を取得する物理状態量取得部(16)と、
前記物理状態量取得部が取得している前記物理状態量に基づいて、前記ドライバが急なブレーキ操作を実施したか否かを判断する判断部(19)と、を備え、
前記無線通信部は、前記報知処理部が報知処理を実施している状態において、前記判断部によって前記ドライバが急なブレーキ操作を実施したと判定された場合には、前記報知処理の元となった推定に用いた複数種類の前記特徴量とその推定結果を、フィードバックデータとして前記センタに送信し、
前記センタは前記方向推定装置から送信されてくる前記フィードバックデータを用いて、前記推定用パラメータを算出し、その算出した前記推定用パラメータを前記方向推定装置に送信するものであって、
前記無線通信部は、前記センタが新たに算出した前記推定用パラメータを受信した場合には、その受信した前記推定用パラメータを前記パラメータ記憶部に保存することを特徴とする方向推定装置。 - 請求項5から7の何れか1項において、
前記報知処理部は、警告レベルが異なる複数種類の報知態様で報知処理を実行するものであって、
前記受信強度取得部が取得した3種類の前記受信パターンの受信信号強度の代表値を特定する代表値特定部(G1)を備え、
前記報知処理部は、前記代表値特定部が特定している前記代表値の大きさに基づいて、前記報知処理の態様を決定することを特徴とする方向推定装置。 - 請求項8において、
前記代表値特定部が特定している前記代表値の時間変化に基づいて、前記方向推定部による推定の精度を低下させる外乱が存在するか否かを判定する外乱判定部(G3)と、
前記代表値特定部が特定している前記代表値の大きさに基づいて前記報知処理を実施する必要があるか否かを判定する報知要否判定部(G2)と、を備え、
前記報知処理部は、前記外乱判定部によって前記外乱が存在すると判定されている場合であって、且つ、前記報知要否判定部によって前記報知処理を実施する必要があると判定されている場合には、前記外乱が存在すると判定されていない場合に採用する報知態様よりも前記警告レベルが低い報知態様で前記推定結果を報知することを特徴とする方向推定装置。 - 請求項9において、
前記外乱判定部は、
複数時点における前記代表値を時系列に並べたデータに基づいて前記代表値の一定距離当りの変化率を示す受信強度変化率を算出し、
前記受信強度変化率と現在の前記代表値から次回以降の前記代表値の予測値である予測代表値を算出し、
或る時点において前記代表値特定部が特定した前記代表値と、その時点に対応する前記予測代表値との差が所定の閾値以上となった場合に前記外乱が存在すると判定することを特徴とする方向推定装置。 - 請求項9において、
前記外乱判定部は、
3以上の複数時点における前記代表値を時系列に並べたデータに基づいて前記代表値の一定距離当りの変化率を示す受信強度変化率を算出し、
前記代表値特定部が前回特定した前記代表値と、前記代表値特定部が今回新たに特定した前記代表値との差に基づいて瞬間変化率を算出し、
前記受信強度変化率と前記瞬間変化率との差が所定の閾値以上となった場合に前記外乱が存在すると判定することを特徴とする方向推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015241505A JP6558235B2 (ja) | 2015-12-10 | 2015-12-10 | 方向推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015241505A JP6558235B2 (ja) | 2015-12-10 | 2015-12-10 | 方向推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017106834A true JP2017106834A (ja) | 2017-06-15 |
| JP6558235B2 JP6558235B2 (ja) | 2019-08-14 |
Family
ID=59059382
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015241505A Expired - Fee Related JP6558235B2 (ja) | 2015-12-10 | 2015-12-10 | 方向推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6558235B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190004602A (ko) * | 2017-07-04 | 2019-01-14 | 한국정보공학 주식회사 | 통학 차량용 안전사고 방지 시스템 및 이의 동작 방법 |
| CN109991566A (zh) * | 2019-03-28 | 2019-07-09 | 中国电子科技集团公司第三十六研究所 | 一种测向方法、测向装置和测向系统 |
| WO2020172383A1 (en) * | 2019-02-20 | 2020-08-27 | Denso International America, Inc. | A system and method for determining angle of arrival for communications |
| CN112262323A (zh) * | 2018-06-14 | 2021-01-22 | 株式会社电装 | 终端位置推定系统、终端位置推定装置、终端位置推定方法以及控制程序 |
| JP2021012033A (ja) * | 2019-07-03 | 2021-02-04 | Rfルーカス株式会社 | 位置検出システム、位置特定装置及び位置特定プログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1094040A (ja) * | 1996-03-22 | 1998-04-10 | Matsushita Electric Ind Co Ltd | 移動体無線通信システムとその移動局の位置検出方法 |
| JP2007015574A (ja) * | 2005-07-08 | 2007-01-25 | Kawasaki Heavy Ind Ltd | プラットホーム検知システム |
| US20140022128A1 (en) * | 2012-01-13 | 2014-01-23 | Ziva Corporation | Geolocation |
| JP2014222831A (ja) * | 2013-05-14 | 2014-11-27 | 独立行政法人国立高等専門学校機構 | マルチビームアンテナ用給電回路およびそれを備えるマルチビームアンテナ |
| JP2015108871A (ja) * | 2013-12-03 | 2015-06-11 | マツダ株式会社 | 車両の歩行者検出装置 |
-
2015
- 2015-12-10 JP JP2015241505A patent/JP6558235B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1094040A (ja) * | 1996-03-22 | 1998-04-10 | Matsushita Electric Ind Co Ltd | 移動体無線通信システムとその移動局の位置検出方法 |
| JP2007015574A (ja) * | 2005-07-08 | 2007-01-25 | Kawasaki Heavy Ind Ltd | プラットホーム検知システム |
| US20140022128A1 (en) * | 2012-01-13 | 2014-01-23 | Ziva Corporation | Geolocation |
| JP2014222831A (ja) * | 2013-05-14 | 2014-11-27 | 独立行政法人国立高等専門学校機構 | マルチビームアンテナ用給電回路およびそれを備えるマルチビームアンテナ |
| JP2015108871A (ja) * | 2013-12-03 | 2015-06-11 | マツダ株式会社 | 車両の歩行者検出装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190004602A (ko) * | 2017-07-04 | 2019-01-14 | 한국정보공학 주식회사 | 통학 차량용 안전사고 방지 시스템 및 이의 동작 방법 |
| KR102041405B1 (ko) * | 2017-07-04 | 2019-11-06 | 한국정보공학 주식회사 | 통학 차량용 안전사고 방지 시스템 및 이의 동작 방법 |
| CN112262323A (zh) * | 2018-06-14 | 2021-01-22 | 株式会社电装 | 终端位置推定系统、终端位置推定装置、终端位置推定方法以及控制程序 |
| WO2020172383A1 (en) * | 2019-02-20 | 2020-08-27 | Denso International America, Inc. | A system and method for determining angle of arrival for communications |
| US11269044B2 (en) | 2019-02-20 | 2022-03-08 | Denso International America, Inc. | System and method for determining angle of arrival for communications |
| US11493588B2 (en) | 2019-02-20 | 2022-11-08 | Denso International America, Inc. | System and method for determining angle of arrival for communications |
| CN109991566A (zh) * | 2019-03-28 | 2019-07-09 | 中国电子科技集团公司第三十六研究所 | 一种测向方法、测向装置和测向系统 |
| JP2021012033A (ja) * | 2019-07-03 | 2021-02-04 | Rfルーカス株式会社 | 位置検出システム、位置特定装置及び位置特定プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6558235B2 (ja) | 2019-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6558235B2 (ja) | 方向推定装置 | |
| US10867234B2 (en) | Error based locationing of a mobile target on a road network | |
| JP4345832B2 (ja) | 道路状況検出システム | |
| CN105682222B (zh) | 一种基于车辆自组织网络的车辆位置定位信息融合方法 | |
| US9990732B2 (en) | Entity recognition system | |
| US8041469B2 (en) | Determining relative spatial information between vehicles | |
| CN101933062B (zh) | 用于传感道路和交通状况的系统 | |
| US20170309178A1 (en) | Method and device for setting up a movement model of a road user | |
| JP5645928B2 (ja) | 無線通信システムにおける環境評価 | |
| EP2992514B1 (en) | Method, system and computer program for determining the orientation of an apparatus | |
| KR20190101909A (ko) | 위험물 감지를 위한 차량용 레이더 시스템 | |
| WO2019118403A1 (en) | Window based locationing of mobile targets using complementary position estimates | |
| JP2015161545A (ja) | 車両挙動予測装置及びプログラム | |
| WO2016208115A1 (ja) | 注意喚起出力装置 | |
| JP2012059058A (ja) | 危険推定装置及びプログラム | |
| CN109493641B (zh) | 信息处理装置、信息提供系统和信息提供方法 | |
| JP6172458B2 (ja) | 車両の歩行者検出装置 | |
| CN113792598A (zh) | 基于车载摄像头的汽车碰撞预测系统和方法 | |
| JP2017135603A (ja) | 歩行者位置検出システム、車載注意喚起装置、携帯情報端末、および歩行者位置検出方法 | |
| TWI486614B (zh) | 定位裝置、定位方法及程式 | |
| JP2015072636A (ja) | 情報処理装置 | |
| WO2019188886A1 (ja) | 端末装置、情報処理方法、プログラム、及び、記憶媒体 | |
| KR20200097772A (ko) | 객체들의 특징적인 구조들을 고려하여 차량을 위한 특징 기반 로컬리제이션 맵을 생성하기 위한 방법 | |
| CN111731285B (zh) | 基于v2x技术的车辆防碰撞方法及装置 | |
| US11782150B2 (en) | Method and apparatus for processing CFAR of sensor data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180704 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190618 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190701 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6558235 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |