JP2017103194A - 導電膜ヒータの温度制御法 - Google Patents
導電膜ヒータの温度制御法 Download PDFInfo
- Publication number
- JP2017103194A JP2017103194A JP2015246707A JP2015246707A JP2017103194A JP 2017103194 A JP2017103194 A JP 2017103194A JP 2015246707 A JP2015246707 A JP 2015246707A JP 2015246707 A JP2015246707 A JP 2015246707A JP 2017103194 A JP2017103194 A JP 2017103194A
- Authority
- JP
- Japan
- Prior art keywords
- temperature
- conductive film
- heater
- film heater
- temperature control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Surface Heating Bodies (AREA)
- Control Of Resistance Heating (AREA)
Abstract
【課題】印刷で作られた導電膜ヒータの温度制御法には、次のような課題があった。
(1)温度センサーの点だけの温度情報で温度制御していたため誤差が大きかった。(2)透明な導電膜ヒータでは温度センサーの配置でヒータ面の視野が狭くなっていた。(3)導電膜ヒータの温度制御法には多種類あるが、安定した制御法は不明確であった。(4)導電膜ヒータのマルチ配列ではリード線数が多くなり複雑なハーネスとなっていた。
【解決手段】導電膜ヒータのヒータ部の抵抗変化を利用して温度検知素子とすることでヒータ温度と該素子との誤差を小さくすることができる。次に、透明な導電膜ヒータにおいて、温度検知素子をヒータ部と同一材料で形成し、ヒータ部側辺または中央部に配置して視野の狭小化を防ぎ、同時にハーネスも簡素化できた。また、温度制御に時間分割法、PWM、PID制御を採用し、安定した導電膜ヒータの温度制御法を案出した。
【選択図】図2
(1)温度センサーの点だけの温度情報で温度制御していたため誤差が大きかった。(2)透明な導電膜ヒータでは温度センサーの配置でヒータ面の視野が狭くなっていた。(3)導電膜ヒータの温度制御法には多種類あるが、安定した制御法は不明確であった。(4)導電膜ヒータのマルチ配列ではリード線数が多くなり複雑なハーネスとなっていた。
【解決手段】導電膜ヒータのヒータ部の抵抗変化を利用して温度検知素子とすることでヒータ温度と該素子との誤差を小さくすることができる。次に、透明な導電膜ヒータにおいて、温度検知素子をヒータ部と同一材料で形成し、ヒータ部側辺または中央部に配置して視野の狭小化を防ぎ、同時にハーネスも簡素化できた。また、温度制御に時間分割法、PWM、PID制御を採用し、安定した導電膜ヒータの温度制御法を案出した。
【選択図】図2
Description
本発明は高分子フィルムやガラスなどの面状基材上に導電膜を成形し、電極を取り付けて電力供給するヒータにおいて、導電膜材料の抵抗値が温度変化することを利用して発熱部を所望の温度に保つ導電膜ヒータの温度制御法に関するものである。
導電膜ヒータは医療機材の保温や電子基板の保温などに使われている。さらに透明な導電膜ヒータは低温環境で使われる液晶ディスプレイの保温部材、交通信号の防曇部材、監視カメラの結露防止部材などに広く利用されている。この種のヒータは発熱パネルや薄膜抵抗体ヒータとも呼ばれ、近年注目を集めている。
従来の導電膜ヒータは、長方形(または任意形状)の面状基材の上に均一な導電膜を成膜し、長方形の相対する2辺に電極を印刷等で形成して構造ができあがる。印刷された一対の電極に電力を供給することにより、ヒータとしての機能を現出する。
面状機材としては、高分子フィルム、ガラス、ステンレス板、銅板等が用いられる。高分子フィルムは透明導電膜ヒータとして使われることが多い。中でもPET(ポリエチレンテレフタレート)、PEN(ポリエチレンナフタレート)、PC(ポリカーボネート)、ポリイミドが代表的な高分子フィルムの面状基材である。
導電膜の透明な材料としてITO膜(インジウムと錫の酸化物の膜)、銀ナノワイヤ膜、導電性ポリマー膜などがあり、不透明な材料としては、カーボン印刷膜、金属蒸着膜が知られている。
電極としては、固有抵抗値の低い銀ペーストの印刷膜が代表例である。他方、安価な銅やニッケル等の金属ペーストも用いられる。また、銅箔などに機械的加工を施して電極として使用することも多い。
温度制御法としては、電圧を一定にして通電し、外気温より高く温度を保つオープン制御のタイプ、導電膜ヒータに温度センサーを貼り付けてヒータの温度を検出しつつヒータ面温度を制御する閉ループタイプ、ヒータ近辺にサーモスタットを配置して環境の特定温度以下では電力を供給し、ある温度以上では電力供給を停止するタイプ等多数存在する。
本発明においては、上記に概説した導電膜ヒータの温度制御法についての改良を提案するものである。
本発明においては、上記に概説した導電膜ヒータの温度制御法についての改良を提案するものである。
導電膜ヒータは上述の通り、ヒータ面温度を周囲温度より高い状態に保持して電子機器の曇り、結露や雪などを除去しようとするものである。したがって常に所望の温度に保持するための機能が要求される。
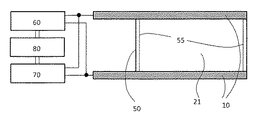
ここで、従来の導電膜ヒータの温度制御法の典型的なタイプを、図1を用いて説明する。
図1において、導電膜ヒータ部20に電力を供給する電力供給電極10、導電膜が成膜された面状基材50、導電膜がエッチング工程で除去された境目である導電膜の縁55、サーミスターや熱電対と電極を配置して構成される温度センサー30、温度情報を取り出す温度検知電極40等から導電膜ヒータは成り立っている。この導電膜ヒータの電極は電力供給回路60に接続され、また温度センサーの電極は温度検知回路70に接続される。温度検知回路の温度情報によって温度制御ユニット80から電力供給回路60へ指令が出され該回路が作動し、導電膜ヒータの温度制御が実現する。
図1において、導電膜ヒータ部20に電力を供給する電力供給電極10、導電膜が成膜された面状基材50、導電膜がエッチング工程で除去された境目である導電膜の縁55、サーミスターや熱電対と電極を配置して構成される温度センサー30、温度情報を取り出す温度検知電極40等から導電膜ヒータは成り立っている。この導電膜ヒータの電極は電力供給回路60に接続され、また温度センサーの電極は温度検知回路70に接続される。温度検知回路の温度情報によって温度制御ユニット80から電力供給回路60へ指令が出され該回路が作動し、導電膜ヒータの温度制御が実現する。
上述のように所望の温度に保持する機能は、ヒータ面に小さな温度センサーを配置し、その温度を計測して、しかるべき制御手段(たとえばPID制御)により現出されていた。しかし、温度センサーをヒータ面に配置すれば、センサーの狭小な面積の温度のみが検知されて、所望の温度との間に誤差が生じることが多かった。
一方、電極を検知回路に接続するには引き出し用の電極が必要となり配線が複雑になるなどの課題、透明導電膜ヒータの場合には透明なヒータ面の視野が狭くなるという課題、温度検知センサーからのリード線により熱量が散逸し温度誤差が生じやすいことなどの課題も有していた。さらに、ヒータ面の抵抗変化の利用や、それと同じ材料を温度検知素子として利用する場合には温度に対する抵抗値の安定性という課題があった。
他方、温度センサーからの信号を処理して、温度制御するための電力供給方法は多種類考えられる。それらは大きく分けて、抵抗法、二周波数法、時間分割法がある。これらの制御法のうち、どの方法が導電膜ヒータの温度制御法として優れているか明確にはなっていなかった。加えて、電力供給量が大きくなると可聴音ノイズの発生も課題であった。
以上の課題をまとめると以下のようになる。
第一課題として、温度センサーに個別のものを用いると、一般にセンサー面積は小さくその面積しか計測されず、温度センサーのリード線からの熱の散逸などもあってヒータ面の平均温度との間に乖離が生じ、所望の温度を保持することの安定性に問題が生じていた。
第一課題として、温度センサーに個別のものを用いると、一般にセンサー面積は小さくその面積しか計測されず、温度センサーのリード線からの熱の散逸などもあってヒータ面の平均温度との間に乖離が生じ、所望の温度を保持することの安定性に問題が生じていた。
第二課題として、ヒータ面が透明である透明導電膜ヒータの場合には、温度センサーが不透明なため、ヒータ面の視野が狭小になるという欠点を有していた。
第三課題として、上記と同じ透明導電膜ヒータの場合、ヒータ面上に温度センサーを配置すると、印刷で形成された電極がヒータ面の視野をさらに狭小にしていた。
第四課題として、ヒータ面上に温度センサーを配置し、リード線に通常の銅線や補償導線などを使う場合にはリード線の数が増大し、配線やケーブルハーネスが複雑になるという欠点があった。特に、透明導電膜ヒータがマルチ配列で使用される信号授受システムでは、回路との接続のためのケーブルハーネスが複雑化するという大きな課題があった。
第五課題として、温度制御法上の課題がある。温度制御法として、抵抗法、二周波数法、時間分割法などが存在することはこれまでに述べた。抵抗法では、温度センサーの温度検知回路とヒータに通電する電力供給回路とは電気的に独立している制御法である。二周波数法は、温度検知回路の電流と、電力供給回路の電流はそれぞれ周波数を異にし、それらを重畳して同じリード線や電極を使う温度制御法である。時間分割法は、温度検出回路の動作時間と、電力供給回路の動作時間とに時間差を設け同じリード線や電極を使うが、時間重複のない温度制御法である。これら3制御法について、導電膜ヒータの温度制御法としての優劣が明確ではなかった。
第六課題として、温度検知方法においてヒータ面の抵抗変化、またはヒータ面と同じ材料の抵抗変化を利用する場合には、温度制御の電力が大きいので、電力の供給時に、導電膜ヒータの伸縮や共振により、可聴音ノイズが発生するという課題があった。
第七課題として、導電膜ヒータのヒータ面の抵抗変化を利用した温度検知や、ヒータ面と同一の材料を使った温度検知素子による温度検知の場合には、温度と材料の抵抗値との安定性、および時間経過に対する抵抗値の安定性に問題があった。
本発明においては、以下の手段を提案することにより、上記の課題の解決を目的としている。なお、以下のページにおいて、数式にはエクセルと同じ表現を用いている。すなわ

課題解決の第1手段として、独立の温度センサーをヒータ面に配置するのではなく、ヒータ面全面の抵抗値変化を利用することを提案する。これはヒータ面に形成されている電極を電力供給回路にも温度検知回路にも接続することを意味する。
この第1手段は、先の第一課題に対応し、ヒータ面の抵抗変化を温度検出に利用することで、温度センサーが不要になり、安価になる。さらに、ヒータ面自身の温度で温度制御が可能になり、制御の安定性が増す。
同時に本手段により、第二課題である温度センサーが不透明であることによる透明導電膜ヒータの視野が狭くなることへの対策にもなる。
第2手段として、第一手段で掲げた導電膜ヒータの抵抗値と温度検知回路との整合性をとることが難しい場合に、ヒータ面と同一材料の温度検知素子をヒータ面近傍に形成し、該素子の抵抗値の温度変化を利用して温度計測をすることを提案する。そのために導電膜ヒータ面の側辺またはヒータ面の中心部に、ヒータ面電極にほぼ垂直に、温度検出素子を形成する。本手段では該素子に面積的な広がりができ、温度計測が該素子面積の平均温度として検出されるため、制御の安定性が増す。さらに、温度検知素子面の平均温度と導電膜ヒータ面の平均温度との差異をあらかじめ測定し、そのデータを記憶して制御に利用すれば、精度の高い温度制御が可能となる。加えて、透明導電膜ヒータの場合には、温度センサーによる視野が狭くなることも回避できる。本手段は第一、第二課題に対応するものである。
第3手段として、第2手段に加えて、印刷で作られたヒータ部の電極の1極と温度検知素子の電極の1極を共用することを提案する。これにより第三課題である印刷電極による透明導電膜ヒータの視野の狭小化をさらに軽減できる。
先に第四課題とて従来の温度センサーに銅線や補償導線を使うと、配線やケーブルハーネスが複雑になることを挙げた。本手段のように電極の共有化により配線の簡素化が可能になる。加えて、配線の簡素化により接続される回路の電気的ノイズの低下も期待できる。上述の通り、本手段は第三、第四課題に対応する。
第4手段として、これまで第2、第3手段で示してきた温度検知素子に、温度制御電力を供給することを提案する。この温度検知素子は、導電膜ヒータと同一材料であり製造工程も同じになるが、ヒータ面とは別な位置に形成される。
通常、温度検知素子には温度制御電力は供給されないので、ヒータ面より温度低下が大きく温度制御の精度が悪くなる。この温度低下を補うために、該素子にも温度制御電力を供給する。先にあげた温度の3制御法のうち、抵抗法と二周波数法では該素子に電力供給をすることはかなり難しい。しかし、時間分割法では、電力供給の時間にはヒータ部および該素子と電力供給回路はON状態にし、温度検知の時間には温度検知回路のみON状態にすれば、該素子に電力供給することは容易である。このように該素子の両端に電力供給回路の電圧を印加すると、該素子とヒータ面はほぼ同じ温度になる。これは、該素子長さが電極幅相当分短くなって抵抗値が下がり、電流量が増加する一方、電力を供給していない(導電膜のない)空きの領域も増えているので、それらが平均化され、ヒータ面の温度に近い該素子の温度が実現する。
さらに温度検知素子温度の精度を上げることを説明する。時間分割法のもとで、導電膜の縁55から該素子の遠い方の辺との距離をa(図3参照)とし、ヒータ面の電極間距離L1
ることにより、空き領域を含めた平均電力密度が同じになるので両者の面積の温度は同一になる。具体的な電圧の詳細は実施例2で示す。
この第4手段は、ヒータ面と同一材料でヒータ面近傍に温度検知素子を形成するために、ヒータ面と該素子面とで温度差が生じるという新たな課題に対する対策である。
この第4手段は、ヒータ面と同一材料でヒータ面近傍に温度検知素子を形成するために、ヒータ面と該素子面とで温度差が生じるという新たな課題に対する対策である。
第5手段として、上記第2手段として提案したヒータの側辺または中央部に温度検知素子を形成する構造において、該素子の形状を電極に垂直なジグザグ型(側辺縦型ジグザグ温度検知素子)にすることや、あるいは電極に平行な方向にジグザグ型(側辺横型ジグザグ型温度検知素子)にすることを提案する。このような構造にすることにより、該素子の抵抗値を広範囲に変えることができるようになり、温度検知回路のインピーダンスに整合性を持たせることが容易となる。さらには、温度の測定精度を上げることに繋がる。これは新しい特長として追加されるものである。
第6手段では、時間分割法を温度制御中に発生する可聴音ノイズの対策手段として、導電膜ヒータの温度制御法に加えることを提案する。
温度制御法には、大きく分けて抵抗法、二周波数法、時間分割法があることを、先に述べた。また、第4手段で「時間分割法のもとで温度検知素子に制御電力を供給する」ことも述べた。ここでは、さらに時間分割法が可聴音ノイズの出ない導電膜ヒータの温度制御法に適していることを述べる。
温度制御法には、大きく分けて抵抗法、二周波数法、時間分割法があることを、先に述べた。また、第4手段で「時間分割法のもとで温度検知素子に制御電力を供給する」ことも述べた。ここでは、さらに時間分割法が可聴音ノイズの出ない導電膜ヒータの温度制御法に適していることを述べる。
抵抗法は、温度検知素子の電極と電力供給電極は独立しているので、回路における自由度は高い。しかし、独立した温度センサーを必要とし、本発明で説明している温度検知素子材料とヒータ部材料が同一で電極の1極を共用する場合では、温度制御電力と温度検知電流の混信が発生しやすい。さらに、第4手段を併用することは難しく、抵抗法は導電膜ヒータの温度制御法には適していない。
二周波数法は、温度検知用の周波数(高い)と温度制御電力用の周波数(低い)が1000倍以上離れていても、混信が発生して温度計測の精度が低下する。また、第4手段を併用することはやはり難しい。したがって、二周波数法も本発明の導電膜ヒータの温度制御法に適しているとはいえない。
時間分割法では、温度検知電流のパルス幅と温度制御電力のパルス幅を自由に選択でき、混信も少なく、電極の共用も容易である。温度制御電力が大きいことから発生する可聴音ノイズを避けるような制御周期50msec(ミリ秒)以上のパルス幅も自由に設定できる。以上を勘案し、3制御法のうち時間分割法は導電膜ヒータの温度制御法に最も適した方法といえる。
第6手段の時間分割法もとで、温度検知素子に電力を供給する上記第4手段を具現化することは電力供給回路に大きな変更なしに可能である。時間分割法で導電膜ヒータの温度制御を行うことは、温度検知の精度も上がり、温度制御の電力による可聴音ノイズの回避も簡単にできる。本手段は第五課題と第六課題の対策である。
第7手段として、時間分割法をさらに深化させて活用するために、電力供給にパルス幅変調(PWM)を導入し、電力供給のパルス幅の算出法としてPID制御を組み合わせる。時間分割法とPWM、PID制御との整合性の良さを利用して併用し、本発明の導電膜ヒータの温度制御法として提案する。
検知した温度にしたがって導電膜ヒータを温度制御することについて、PID制御などの古典制御法のほか、よく知られたファジー制御や最適制御、適応制御などいくつかの現代制御法も考えられる。いずれの方式でも、適用対象を考察し、メリットのある方法を採用すればよい。他方、PID制御のアルゴリズムは基板に組み込まれて市販されており、信頼性も高く、考え方も分かり易い。また、安価でもあるので、第7手段ではPID制御も導電膜ヒータの温度制御法に組み入れている。これが第五課題の温度制御法についての答えである。
第8手段としてPWMの変調方式を用いて、パルス幅の時間と温度検知時間とを具体的数値をあげて可聴音ノイズをなくし、デジタル制御の遅れを最小にする方法を提案する。第7手段で説明した時間分割法、PWM、PID制御の組み合わせは第8手段でも同じである。
第8手段として、温度制御用の電力が大きいと導電膜ヒータから可聴音ノイズが発生するので、その対策としてPWMの制御周期を50msec以上(繰り返し周波数を20Hz以下)とすることを提案する。PWMのパルスの立下り時間にリンギング等の電気的振動が発生し安定になるまでに時間を要する。回路的工夫やリード線長さの最小化等により、この電気的振動の安定までの時間を0.1msec以下とすることができ、温度計測1回の時間を0.05msec以下(繰り返し周波数20kHz以上)に選択できる。したがって、低音域でも高音域でも可聴音ノイズのない導電膜ヒータの温度制御法が実現する。具体的な数値については実施例6で説明する。
上記の数値の設定では、制御対象物である導電膜ヒータ単体での熱時定数が、数十secもあるので、デジタル制御にありがちな制御の遅れも発生することなく良質な温度制御法が実現できる。以上の事柄をまとめると、温度制御の方法として、時間分割法、PWM、PID制御の組み合わせが最も優れた導電膜ヒータの温度制御法といえる。
本手法は第五、第六課題に対応している。
本手法は第五、第六課題に対応している。
第9手段として、ITO膜の抵抗値を安定化させる方法を提案する。第七課題である温度と抵抗値の安定性低下について考察する。温度センサーとして、第1手段の導電膜ヒータの全面の抵抗値変化を利用する場合や、第2手段であるヒータ側辺の温度検知素子の抵抗値変化を利用する場合のいずれにおいても電力を供給した状態ではエージング効果により抵抗値が徐々に変化(増加、減少など)する。また、温度と抵抗値の線形性が悪く、温度を上下させると同じ点を通過しないヒステリシス現象が出ることもある。これが第七課題である。
この課題に関し、本特許の発明者等による実験の結果、ITO膜の透明導電膜ヒータにおいては、ある時間エージングすれば初期変化の後、きわめて安定な抵抗値の実現が可能となった。エージングにより抵抗値を安定化させたあとのITO膜を使って透明導電膜ヒータを作ることを第1手段から第8手段に加え第9手段として提案する。このエージング処理した材料を使うことにより抵抗値の不安定現象(エージング効果による抵抗値変化、ヒステリシス現象)を回避することができる。その詳細については、実施例6の中で詳しく説明する。
以上の第1手法から第9手法の対策を採用することにより、先に説明した導電膜ヒータの温度制御法における課題を解決し、さらに新しい効果を生み出すことができるものである。
ここで説明した導電膜ヒータの温度制御法には次のような効果がある。
(1)温度検知素子共用導電膜ヒータの場合、温度センサーが不要となり、構造が簡単で 安価になる。
(2)温度検知素子共用型、側辺温度検知素子型の導電膜ヒータでは温度検知が1点でな く、広い領域で行われるので、温度制御の精度が増す。
(3)透明導電膜ヒータの場合、温度検知素子が透明なためヒータ面視野が広くなる。
(4)温度検知素子と導電膜ヒータ面の電極の1極が共用されることによりリード線の引 き回し本数が少なくなり、配線やケーブルハーネスが簡素化され、結果として回路 の電気的ノイズの低下が期待できる。
(5)導電膜ヒータの側辺部や中央部に形成された温度検知素子に電力供給回路から電力 を供給することにより、該素子部の温度低下を防ぎ、高い制御性能が発揮される。
(6)温度検知素子の形状が長方形やジグザグ型など自在にできるので、その抵抗値も自 在に選択でき、温度検知回路とのインピーダンス整合が良くなり、温度計測の精度 が上がる。
(7)時間分割法、PWMの組み合わせにおいて、温度制御の定数を合理的に選択できる ので、混信がなく、可聴音ノイズもなく、デジタル制御の遅延もない安定した導電 膜ヒータの温度制御法が実現できる。
(8)ヒータ面と温度検知素子を同一材料で形成する場合、エージングを施したITO膜 を使用することで抵抗値の安定性が高くなり、良好な透明導電膜ヒータの温度制御 法となる。
(1)温度検知素子共用導電膜ヒータの場合、温度センサーが不要となり、構造が簡単で 安価になる。
(2)温度検知素子共用型、側辺温度検知素子型の導電膜ヒータでは温度検知が1点でな く、広い領域で行われるので、温度制御の精度が増す。
(3)透明導電膜ヒータの場合、温度検知素子が透明なためヒータ面視野が広くなる。
(4)温度検知素子と導電膜ヒータ面の電極の1極が共用されることによりリード線の引 き回し本数が少なくなり、配線やケーブルハーネスが簡素化され、結果として回路 の電気的ノイズの低下が期待できる。
(5)導電膜ヒータの側辺部や中央部に形成された温度検知素子に電力供給回路から電力 を供給することにより、該素子部の温度低下を防ぎ、高い制御性能が発揮される。
(6)温度検知素子の形状が長方形やジグザグ型など自在にできるので、その抵抗値も自 在に選択でき、温度検知回路とのインピーダンス整合が良くなり、温度計測の精度 が上がる。
(7)時間分割法、PWMの組み合わせにおいて、温度制御の定数を合理的に選択できる ので、混信がなく、可聴音ノイズもなく、デジタル制御の遅延もない安定した導電 膜ヒータの温度制御法が実現できる。
(8)ヒータ面と温度検知素子を同一材料で形成する場合、エージングを施したITO膜 を使用することで抵抗値の安定性が高くなり、良好な透明導電膜ヒータの温度制御 法となる。
本発明の実施例を図2〜6を用いて説明する。図の番号と記号はこれまでの説明と共通である。なお、実施例では高分子フィルムの面状基材上の温度検知素子と導電膜ヒータ構造、および温度制御法を説明するが、面状基材としてはガラス板、絶縁膜を施した金属板でも同じことがいえる。
本発明の基本である導電膜ヒータのヒータ面の抵抗変化を温度検知素子として利用する実施例1を図2に示す。導電膜ヒータ部と温度検知素子は全く同一であり、この導電膜の領域を温度検知素子共用導電膜ヒータ部21とする。導電膜ヒータの電極10は印刷とエッチングで形成され、その電極からリード線を介して電力供給回路60と温度検知回路70、さらには温度制御ユニット80に接続される。温度制御ユニットでは、温度検知回路からの温度情報を受け、時間分割法とPWM、PID制御のアルゴリズムに従って、電力供給回路に温度制御指令を送り、温度制御が実現する。
導電膜ヒータ部と温度検知素子の共用により、個別の温度センサーの取り付けも不要となる。したがって、構造が簡単になり配線加工数も減り、安価になる。ヒータ部が透明な材料の透明導電膜ヒータでは、ヒータ面越しの視野が広くなり、監視カメラの結露防止部材、液晶ディスプレイの保温部材などとして優れた部材となる。
このように電力供給と温度検知に同一のヒータ面を使う制御方式を、温度検知素子共用導電膜ヒータの温度制御法とする。実施例1は、先に説明した課題解決の第1手段に対応している。
このように電力供給と温度検知に同一のヒータ面を使う制御方式を、温度検知素子共用導電膜ヒータの温度制御法とする。実施例1は、先に説明した課題解決の第1手段に対応している。
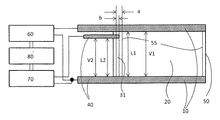
実施例2を図3に示す。本実施例では、実施例1に示したようなヒータ面の抵抗値を利用できない場合、すなわちヒータ部の抵抗が10MΩ以上と極端に高い場合や、10Ω以下など極端に低い場合には温度検知回路とのインピーダンスの整合性が悪く測定精度の低下を招く。このような場合、ヒータ部の側辺に導電膜ヒータと同一材料で、同一の製造工程を経て、所望の抵抗値の側辺温度検知素子31を形成する。図3において、側辺温度検知素子の幅bと該素子の電極間距離L2を変えるえることにより、抵抗値をかなりの範囲で変化させることができる。
図3では側辺温度検知素子に接続されている電極の片方40が導電膜ヒータの電極の片方10と共用する構造になっており配線の簡素化を図っている。図3の構造で温度制御を行うことを、側辺温度検知素子付き導電膜ヒータの温度制御法とする。
この実施例2の特長は、第一に温度検知素子の抵抗値を温度検知に最適な値に選定でき、温度測定の精度が上り制御の質も向上することである。第二として温度検知素子の電極の1極とヒータ部の電極の1極を共用することにより、電極本数が減り、回路と温度検知素子の配線やケーブルハーネスが簡素になる。また、透明導電膜ヒータの場合にはヒータ面の視野の拡大に繋がる。以上の結果、製造しやすく、電気的ノイズの少ない上質な導電膜ヒータの温度制御法が実現する。これは課題解決の第2、第3手段の具現化である。
さらに実施例2について制御の質を向上させる方法について説明する。導電膜ヒータがある温度になっても、温度検知素子はヒータ部の側辺にあるためヒータ部の平均温度から差異が生じている。そこで、温度検知素子が温度計測をしていない時間帯に、電力供給回路60から電力を供給することによって、温度を上昇させる対策をとる。この電力により温度検知素子31の平均温度がヒータ部の平均温度にきわめて近くなり、温度制御の精度が向上する。
さらに両者の温度を近づけるには、ヒータ部に供給される電力密度と、温度検知素子31の空き領域(導電膜のない領域)を含めた面積の平均電力密度を同じにすることである。図3において、ヒータ部のシート抵抗をRoとし、導電膜の縁55と該素子31のヒータ面から最も離れている辺との距離をa、ヒータ部の電極間距離L1、ヒータ部の電極電圧をV1とし、長方形の温度検知素子の幅b、長さL2、該素子に印加される計算上の電圧V2、面積
給電力であるので、両電力が等しいという条件P1=P2から、次の式が成り立つ。
(式1)で示す計算上の電圧V2を側辺温度検知素子の両極に印加すれば、ほぼ同じ面積に同じ電力が加えられることになるので、平均化により、側辺温度検知素子領域とヒータ
V2が同じになる。該素子への印加電圧は、V1から計算上の電圧V2までの間の電圧であれば両者の温度はほぼ同じになると考えられるので、その間の適切な電圧を設定すればよい。このように適切な電圧の印加で側辺温度検知素子の温度補正ができるので、温度制御の質が向上する。
上の説明では、V2の電圧を変えることを考察しているが、時間幅を変えることも考えられる。しかし、この考えはPWMの制御周期に影響を与えることになり、パルス幅の基本設計から変更しなければならない。その工数と繁雑さを考えると、側辺温度検知素子の温度補正には印加電圧を変えて行う方が良策であると判断できる。
なお、実施例2を実現するには図3に加えて電力供給回路にV1ではない適切な電圧を発生する回路、および側辺温度検出素子との間の通電をON・OFFするスイッチング回路が必要となる。これら常識的な付加的回路は、図3では省略されている。実施例2は課題解決の第2、第3、第4手段の具現化である。
図4−1と図4−2、図4−3に実施例3を示す。温度検出素子の抵抗値をさらに大きく変えるためには、導電膜ヒータの側辺部に設けた温度検知素子の形状を変えることで達成できる。シート抵抗Roはヒータ部の設計時に与えられる一定値であるので、素子形状が長方形であれば、抵抗値は図3の素子幅bと長さL2で決まる。抵抗値をさらに増加させたい場合には、ヒータの側辺に設けた素子形状を図4−1のように縦型ジグザグにすれば、かなりの増加を見込むことができる。図4−1を側辺縦型ジグザグ温度検知素子32付き導電膜ヒータと呼ぶ。側辺部の素子領域の形状によっては、図4−2のように側辺横型ジグザグの素子にする方が有利なこともある。これを側辺横型ジグザグ温度検知素子33付き導電膜ヒータと呼ぶ。
ここでジグザグ型と表現している内容は、図4−1や図4−2にあるような角型の形状に限らない。コーナー部が緩やかなカーブをつくる「コ」の字型、あるいは「く」字型、「U」字型など各種考えられるが、ここではその詳細を省略する。
抵抗値を減少させなければならない場合には、素子形状の幅bを大きくし、電極間隔を小さくすることで達成できる。なお、ジグザグ型の温度検知素子に温度補正の電力を供給するには、上記(式1)において、L2としてセンサーの実効長さを代入すれば計算上の電圧V2を算出し、適切な電圧を決定することができる。
抵抗値を減少させなければならない場合には、素子形状の幅bを大きくし、電極間隔を小さくすることで達成できる。なお、ジグザグ型の温度検知素子に温度補正の電力を供給するには、上記(式1)において、L2としてセンサーの実効長さを代入すれば計算上の電圧V2を算出し、適切な電圧を決定することができる。
図4−1と図4−2の場合で、どちらが抵抗値をより大きく変化させられるかは、導電膜ヒータの形状や温度検出素子に割り当てられる面積に依存する。いずれの場合も抵抗値は温度検知素子幅と該素子の実効的な長さによって決まる。
図4−3にヒータ面を2個のヒータ部に分け、その中間に温度検知素子を配置した構造を示す。この構造では、ヒータ部の温度が温度検知素子の両側から熱伝導で熱が伝えられ、上述した温度検知素子に温度補正の電力供給なしに、ヒータ部の平均温度と温度検出素子の温度差を小さくすることができる。この構造を中央部温度検知素子34付き導電膜ヒータとする。中央部温度検知素子でもヒータ部との温度乖離が許容値以上であれば、温度検知素子に電力供給回路から電力を供給して温度補正を行うこともできる。無論、中央部温度検知素子の場合も抵抗値を変えるために、ジグザグ構造とすることもできる。
側辺縦型ジグザグ、側辺横型ジグザグ、中央部の温度検知素子の構造のいずれを選択するかは、ヒータ部の抵抗値、導電膜の透明性、素子部の抵抗値、必要な温度制御の精度などによって決まる。実施例3は課題解決の第5手段を具現化したものである。
側辺縦型ジグザグ、側辺横型ジグザグ、中央部の温度検知素子の構造のいずれを選択するかは、ヒータ部の抵抗値、導電膜の透明性、素子部の抵抗値、必要な温度制御の精度などによって決まる。実施例3は課題解決の第5手段を具現化したものである。
図2から図4−3までの温度制御ユニット80に入っている温度制御アルゴリズムについて実施例4として説明する。先に示した導電膜ヒータの温度制御法では、時間分割法を導入し、温度制御電力はPWMで供給し、温度制御アルゴリズムにはPID制御を適用することを説明した。実施例4においては、その時間分割法の具体的パルス幅を図5と補助的に図2を使って詳述する。
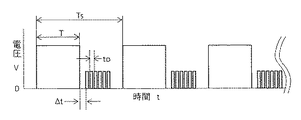
図5は、時間分割法とPWMによる図2の温度検知素子共用導電膜ヒータの電極に印加する電圧を示したものである。温度検知素子からの抵抗値情報を温度検知回路70で受けて温度情報に変換され、温度制御ユニット80に伝送される。この温度情報を温度制御ユニットの中に組み込まれたPID制御のアルゴリズムに従ってパルス幅情報とし、電力供給回路60に送られ、具体的なPWMのパルスとなって導電膜ヒータに供給される。
図5において、電圧V、経過した時間t、PWMにおける温度制御の制御周期をTs、温度制御ユニットからの指示を受けて電力供給回路より供給される電力のパルス幅をT、温度検知回路より温度検知素子に通電し温度を1回測定する時間をto、電力供給パルスの電気振動が治まるまでの時間をΔtとする。温度の精度を上げるための平均化処理の測定回数をnとすると、設計仕様として次の式が成り立つ。
電力供給のパルス幅Tの最大パルス幅Tmaxの時に(式2)において等号が成り立つことも可能である。Δtは安全のため2倍としている。
電力供給回路からの電力により発生する可聴音ノイズを防ぐために、PWMの制御周期は50msec以上(繰り返し周波数20Hz以下)でなければならない。このように設定すれば人間の耳に聴こえるノイズとはならない。式で表せば次式となる。
(式3) Ts≧50msec
(式3) Ts≧50msec
ここで、温度制御機能が動作中には、電力供給回路がON状態となり、温度検知回路はOFF状態になる。ただし、温度補正のために温度検知素子に電力を供給している場合は電
温度検知回路と該素子間はON状態となり、電力供給回路とはOFF状態にスイッチングしている。
具体的にこれらのパルス時間を数値で示す。温度検知のための時間幅は妥当な値として
こで、温度検知の時間幅の繰り返し周波数は電力が小さいので、殆ど問題にならないが、安全のために可聴音帯域以上の繰り返し周波数に設定している。Δtは実験の結果0.1msec
めに、Δtを2倍にしている。制御周期Tsは、可聴音以下にする必要があり、(式3)の通り50msec以上(20Hz以下)とする。
PWMの印加電圧の時間的な最小パルス幅と最大パルス幅の比は100倍にすれば十分な刻み幅と考えられる。最小パルス幅は電力供給回路から通電していない時間(0V時間=温度計測に必要な時間)を採用し、PWMの最大パルス幅Tmaxは温度検知の時間幅の99倍とする。式で表すと次のようになる。
具体的には、Tmax=99×0.6=59.4msec、この値に温度検知の時間幅0.6msecを加えると制御周期Tsは60msecとなる。この値は(式3)を十分満たし、繰り返し周波数に換算すると16.7Hzである。このように時間幅を設定すると、温度制御の電力の時間可変幅の最大パルス幅と最小パルス幅の比が約100倍となり、電力供給の分解幅としては十分な比となる。以上の設定により電力供給回路と温度検知回路が動作している時間中の耳障りなノイズは聴こえなくなる。
透明導電膜ヒータ単体の熱時定数は20sec以上であるため、制御周期60msecで温度制御が作動すれば、仮に電力供給回路からの指令が1パルス時間遅れてもデジタル制御特有の時間遅延の問題は発生せず、温度制御性能は十分発揮される。なお、実施例4は課題解決の第6、第7、第8手段に対応している。
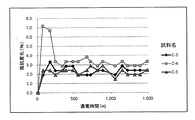
図6−1、図6−2を用いて、実施例5を説明する。導電膜ヒータに電力が供給されて、長時間の運転状態のもとでは温度が一定ならば、抵抗値は一定でなければならない。そこで実施例1のような温度検知素子共用導電膜ヒータ21については、PET上に成膜された透明なITO膜のフィルムを使用することが多いので、ITO膜の透明導電膜ヒータに通電して抵抗値の安定性を調べた。結果を図6−1に示す。
図6−1では透明な温度検知素子共用導電膜ヒータの通電時間と抵抗変化の割合(%)を示す。ヒータの種類によって抵抗値が異なるので、初期の抵抗値を100%として変化をグラフ化した。通電時間(エージング時間)はヒータが外気より30℃高くなるように電圧と電流を設定した。抵抗値測定には標準抵抗を用いて小数点1位(0.1Ω)の精度を保つように測定機器を調整している。温度測定の環境は、エアコンでコントロールされ、23〜27℃に保たれている。
図6−1から分かる通り、200時間程度でITO膜の初期の抵抗変化が終了し、その後は非常に安定した抵抗値となっている。初期の抵抗変化は短いもので24時間、長くても200時間で治まる。ヒータ温度を少し高くすると、初期の抵抗変化終了の時間短縮が可能であることを別の実験で確認している。
一方、図6−2に、温度と抵抗値の値をプロットした結果を示す。ITO膜はエージングを終了した試料を用いている。同図より、温度と抵抗値の関係は非常に優れた線形性を持っていることが分かる。同図にはプロット点を一次式で近似したときの式と、エクセルのグラフで常用されている決定係数R2を示す。R2>0.99と線形性の良好さを示すには十分な数値となっている。抵抗測定の精度は±0.2Ωとみなせるので、図中の式から1℃で約0.06Ωの変化となり、温度の測定精度は±3℃となる。温度測定の専門装置としては十分とは言えないが、透明導電膜ヒータの温度制御機能としては、十分な値である。
ITO膜フィルムはスパッタリングにより作成される。製造工程の違いから、結晶質、非晶質、さらにはシート抵抗の大小(膜厚の大小)等さまざまな特性の製品が販売されている。そして初期の抵抗変化もさまざまである。しかし、大半の試料はエージングによる初期の抵抗変化が終了すると、ITO膜の抵抗値は良好な安定性を示す。
この安定性は、本特許の発明者らの実験で初めて明らかになったと考える。上記で説明したエージングによる安定化と温度と抵抗値の直線性により、ITO膜は透明導電膜ヒータとしての役割と温度検知素子としての役割を両立させることができる優れた材料といえる。なお、実施例5は課題解決の第9手段の具現化である。
10 電力供給電極
20 導電膜
21 ヒータ部共用温度検知素子
30 温度検知素子
31 側辺温度検知素子
32 側辺縦型ジグザグ温度検知素子
33 側辺横型ジグザグ温度検知素子
34 中央部温度検知素子
40 温度検知電極
50 面状基材
55 導電膜の縁
60 電力供給回路
70 温度検知回路
80 温度制御ユニット
a ヒータ面の縁と温度検知素子の遠い方の辺との距離
b 温度検知素子の幅
L1 ヒータ面の電極間距離
L2 温度検知素子の電極間距離
V1 ヒータ面の電極間電圧
V2 温度検知素子の電極に印加する計算上の電圧
Ts PWMにおける制御周期
T 電力供給の時間幅
to 1回の温度検知の時間幅
Δt 電力供給パルスの過渡現象が治まる時間
V 電圧
t 経過した時間
n 平均化処理の測定回数
20 導電膜
21 ヒータ部共用温度検知素子
30 温度検知素子
31 側辺温度検知素子
32 側辺縦型ジグザグ温度検知素子
33 側辺横型ジグザグ温度検知素子
34 中央部温度検知素子
40 温度検知電極
50 面状基材
55 導電膜の縁
60 電力供給回路
70 温度検知回路
80 温度制御ユニット
a ヒータ面の縁と温度検知素子の遠い方の辺との距離
b 温度検知素子の幅
L1 ヒータ面の電極間距離
L2 温度検知素子の電極間距離
V1 ヒータ面の電極間電圧
V2 温度検知素子の電極に印加する計算上の電圧
Ts PWMにおける制御周期
T 電力供給の時間幅
to 1回の温度検知の時間幅
Δt 電力供給パルスの過渡現象が治まる時間
V 電圧
t 経過した時間
n 平均化処理の測定回数
Claims (9)
- 導電膜ヒータの2本の電極に、電力供給回路の2端子と、温度検知回路の2端子を並列接続し、温度制御中に電力供給回路が動作している時間と温度検知回路が動作している時間とに時間的重複がないことを特徴とする導電膜ヒータの温度制御法。
- 導電膜ヒータのヒータ部電極と電力供給回路が接続され、ヒータ部の側辺部または中央部に温度検知素子が該ヒータ部と同一材料で形成され、温度検知素子の電極は温度検知回路に接続されていることを特徴とし、かつ温度制御中の回路の動作は請求項1に記載の導電膜ヒータの温度制御法。
- 導電膜ヒータのヒータ部の電極の1極と温度検知素子の電極の1極が共用されていることを特徴とする請求項2に記載の導電膜ヒータの温度制御法。
- 導電膜ヒータの側辺部又は中央部に設けられた温度検知素子において、電力供給回路が動作している時間に、電力供給回路から該素子へ電力が供給されることを特徴とする請求項2、請求項3に記載の導電膜ヒータの温度制御法。
- 導電膜の縁と温度検知素子の遠い方の辺の距離をa、該素子の幅をb、ヒータ部の電極幅をL1、該素子の電極幅をL2、導電膜ヒータに印加する電圧をV1、該素子の電極に対する
ータ部に接続されているON状態において、該素子にV1からV2までの間の適切な電圧が印加されることを特徴とする請求項2、請求項3、請求項4に記載の導電膜ヒータの温度制御法。 - 温度検知素子の素子形状が長方形か、ジグザグ状になっていることを特徴とする請求項2、請求項3、請求項4、請求項5に記載の導電膜ヒータの温度制御法。
- 温度制御の動作において、時間分割法、PWM(パルス幅変調)を共用していることしていることを特徴とする請求項1、請求項2、請求項3、請求項4、請求項5、請求項6に記載の導電膜ヒータの温度制御法。
- PWMの制御周期Ts、電力供給の最大時間幅Tmax、1回の温度検知時間幅to、平均化のための温度検知回数n、PWMのパルスの電圧の安定化時間Δtとすると、次の3式、
うに各数値が選択されていることを特徴とする請求項1、請求項2、請求項3、請求項4、請求項5、請求項6、請求項7に記載の導電膜ヒータの温度制御法。 - 導電膜ヒータのヒータ材料がITO膜であることを特徴とする請求項1、請求項2、請求項3、請求項4、請求項5、請求項6、請求項7、請求項8に記載の導電膜ヒータの温度制御法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015246707A JP2017103194A (ja) | 2015-12-02 | 2015-12-02 | 導電膜ヒータの温度制御法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015246707A JP2017103194A (ja) | 2015-12-02 | 2015-12-02 | 導電膜ヒータの温度制御法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017103194A true JP2017103194A (ja) | 2017-06-08 |
Family
ID=59016789
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015246707A Pending JP2017103194A (ja) | 2015-12-02 | 2015-12-02 | 導電膜ヒータの温度制御法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017103194A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019189767A1 (ja) * | 2018-03-29 | 2020-04-30 | 三菱電機ビルテクノサービス株式会社 | 加熱装置、加熱方法、及び冷媒回収方法 |
| JP2021012352A (ja) * | 2019-07-09 | 2021-02-04 | パナソニックi−PROセンシングソリューションズ株式会社 | 監視カメラおよびカバー |
| JP2021057117A (ja) * | 2019-09-27 | 2021-04-08 | 三菱電機ビルテクノサービス株式会社 | 加熱装置及び加熱方法 |
| JP7553149B2 (ja) | 2019-07-09 | 2024-09-18 | i-PRO株式会社 | 監視カメラ |
| KR102712470B1 (ko) * | 2023-03-21 | 2024-10-04 | 엄주용 | 저온의 환경에서 가용 온도범위를 넓혀주는 ito 전극 발열 제어시스템 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55117889A (en) * | 1979-02-28 | 1980-09-10 | Matsushita Electric Works Ltd | Method of manufacturing panel heater |
| JPS5811620U (ja) * | 1981-07-15 | 1983-01-25 | 松下電工株式会社 | 電気カ−ペツト |
| JPH0334005A (ja) * | 1989-06-30 | 1991-02-14 | Kyocera Corp | 温度制御装置における異常検知方法とその異常検知回路 |
| JPH07230877A (ja) * | 1994-02-18 | 1995-08-29 | Totoku Electric Co Ltd | ヒータ線 |
| JPH11142194A (ja) * | 1997-11-12 | 1999-05-28 | Harman Co Ltd | 流体検知装置及び給湯装置 |
| JPH11142217A (ja) * | 1997-11-07 | 1999-05-28 | Harman Co Ltd | 流体検知装置 |
| JP3351968B2 (ja) * | 1996-11-15 | 2002-12-03 | シャープ株式会社 | 面状電気暖房器 |
| JP2014174515A (ja) * | 2013-03-13 | 2014-09-22 | Seiko Epson Corp | プロジェクター |
-
2015
- 2015-12-02 JP JP2015246707A patent/JP2017103194A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55117889A (en) * | 1979-02-28 | 1980-09-10 | Matsushita Electric Works Ltd | Method of manufacturing panel heater |
| JPS5811620U (ja) * | 1981-07-15 | 1983-01-25 | 松下電工株式会社 | 電気カ−ペツト |
| JPH0334005A (ja) * | 1989-06-30 | 1991-02-14 | Kyocera Corp | 温度制御装置における異常検知方法とその異常検知回路 |
| JPH07230877A (ja) * | 1994-02-18 | 1995-08-29 | Totoku Electric Co Ltd | ヒータ線 |
| JP3351968B2 (ja) * | 1996-11-15 | 2002-12-03 | シャープ株式会社 | 面状電気暖房器 |
| JPH11142217A (ja) * | 1997-11-07 | 1999-05-28 | Harman Co Ltd | 流体検知装置 |
| JPH11142194A (ja) * | 1997-11-12 | 1999-05-28 | Harman Co Ltd | 流体検知装置及び給湯装置 |
| JP2014174515A (ja) * | 2013-03-13 | 2014-09-22 | Seiko Epson Corp | プロジェクター |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019189767A1 (ja) * | 2018-03-29 | 2020-04-30 | 三菱電機ビルテクノサービス株式会社 | 加熱装置、加熱方法、及び冷媒回収方法 |
| JP2021012352A (ja) * | 2019-07-09 | 2021-02-04 | パナソニックi−PROセンシングソリューションズ株式会社 | 監視カメラおよびカバー |
| JP7553149B2 (ja) | 2019-07-09 | 2024-09-18 | i-PRO株式会社 | 監視カメラ |
| JP2021057117A (ja) * | 2019-09-27 | 2021-04-08 | 三菱電機ビルテクノサービス株式会社 | 加熱装置及び加熱方法 |
| JP7028839B2 (ja) | 2019-09-27 | 2022-03-02 | 三菱電機ビルテクノサービス株式会社 | 加熱装置及び加熱方法 |
| KR102712470B1 (ko) * | 2023-03-21 | 2024-10-04 | 엄주용 | 저온의 환경에서 가용 온도범위를 넓혀주는 ito 전극 발열 제어시스템 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017103194A (ja) | 導電膜ヒータの温度制御法 | |
| JP7084855B2 (ja) | 温度制御セラミック放熱シート及び喫煙具 | |
| US7214909B2 (en) | Temperature sensor | |
| US20080315962A1 (en) | Apparatus for providing oscillator frequency stability | |
| CN113066438B (zh) | 一种亮度补偿装置、方法、及显示装置 | |
| WO2001003472A1 (en) | Thin film thermocouple | |
| CN111132391B (zh) | 集成加热器和传感器系统 | |
| JP2002243555A (ja) | 透明面温度センサ及び透明面温度制御装置 | |
| US8263913B2 (en) | Device equipped with planar heater | |
| KR20120042683A (ko) | 전도성 패턴을 포함하는 표시장치 | |
| WO2013027965A2 (ko) | 클리어 컴파운드 에폭시로 몰딩한 mit 소자 및 그것을 포함하는 화재 감지 장치 | |
| CN107077820B (zh) | 具有温度补偿的液晶显示器 | |
| JP6897104B2 (ja) | 熱電対による温度測定装置 | |
| JP2013003080A (ja) | 電気抵抗の計測装置 | |
| JP5764922B2 (ja) | 温度制御回路、恒温槽型圧電発振器、電子機器及び温度制御方法 | |
| CN107276583B (zh) | 恒温晶体振荡器 | |
| JP2000058232A (ja) | 加熱装置及び画像形成装置 | |
| JPH11326878A (ja) | 液晶表示器 | |
| JP6026391B2 (ja) | 過電流防止装置 | |
| JPH0643436A (ja) | 液晶表示器 | |
| US10748498B2 (en) | Active matrix substrate display device | |
| JPH03153111A (ja) | 弾性表面波発振器 | |
| US9306578B2 (en) | Oscillator | |
| JP2002198208A (ja) | 電子式サーモスタット | |
| JPH11233301A (ja) | 薄膜抵抗発熱素子及びその製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170321 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170926 |