JP2017055552A - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP2017055552A JP2017055552A JP2015177562A JP2015177562A JP2017055552A JP 2017055552 A JP2017055552 A JP 2017055552A JP 2015177562 A JP2015177562 A JP 2015177562A JP 2015177562 A JP2015177562 A JP 2015177562A JP 2017055552 A JP2017055552 A JP 2017055552A
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- motor
- command value
- current command
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Abstract
Description
本発明の他の一態様によるモータ制御装置は、永久磁石を界磁源とするモータを駆動するためのインバータに接続され、入力されたトルク指令値に基づいて前記インバータの出力電圧を制御することで前記モータを制御するものであって、前記トルク指令値に基づいて電流指令値を演算する電流指令生成部と、前記電流指令値に基づいて前記インバータの出力電圧を制御するための電圧指令値を演算する電圧指令生成部と、前記モータの温度上昇により前記モータへの印加電圧が上昇する場合に、前記電流指令値を補正して前記インバータの出力電圧を制限する電圧飽和抑制部と、を備え、前記電圧指令生成部は、前記電流指令値に基づいて非干渉電圧指令値を演算する非干渉制御部と、前記モータの電流値および前記電流指令値に基づいてPI電圧指令値を演算するPI制御部と、を有し、前記非干渉電圧指令値と前記PI電圧指令値とを加算することにより前記電圧指令値を演算する。
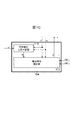
図1は、本発明の第1の実施形態に係るモータ制御装置を含むモータ駆動システムの構成を示す図である。図1に示すモータ駆動システムは、電源10と、リレー20と、モータ30と、磁極位置検出回路40と、インバータ50と、平滑コンデンサ60と、電圧検出回路70と、電流センサ80と、モータ温度センサ90と、モータ制御装置100とを備える。
T=Pn{φ・Iq+(Ld-Lq)・Id・Iq} ・・・(1)
Vd=Ra・Id-ω・Lq・Iq ・・・(2)
Vq=Ra・Iq+ω・Ld・Id+ω・φ ・・・(3)
V0=√(Vd2+Vq2)=√{(-ω・Lq・Iq)2+(ω・Ld・Id+ω・φ)2} ・・・(4)
Ra・Id-ω・Lq・Iq=Ra・(Id+Id')-ω・(Lq+Lq’)・(Iq+Iq') ・・・(5)
ω・Lq・Iq=ω・(Lq+Lq')・(Iq+Iq') ・・・(6)
Iq'=-{Lq'/(Lq+Lq')}・Iq ・・・(7)
Ra・Iq+ω・Ld・Id+ω・φ=Ra・(Iq+Iq')+ω・(Ld+Ld')・(Id+Id')+ω・φ ・・・(8)
Id'=-{Ld'/(Ld+Ld')・Id ・・・(9)
次に本発明の第2の実施形態について説明する。本実施形態では、モータ30の温度上昇によりインダクタンスが変化した場合に、モータ30への印加電圧がインバータ50の電圧制限値を超えないように制限しつつ、モータ30の出力トルクの変化を抑制する例について説明する。なお、本実施形態におけるモータ駆動システムの構成は、図1に示した第1の実施形態における構成と同じである。また、電圧飽和抑制部104の構成も、図7に示した第1の実施形態における構成と同じである。そのため、以下の説明では、これらの構成図を参照して本実施形態の説明を行うこととする。
Pn{φ・Iq+(Ld-Lq)・Id・Iq}=Pn{φ・Iq**+(Ld+Ld'-Lq-Lq')・Id**・Iq**} ・・・(10)
Id**={φ・Iq+(Ld-Lq)・Id・Iq-φ・Iq**}/(Ld+Ld'-Lq-Lq')・Iq**} ・・・(11)
(-ω・Lq・Iq)2+(ω・Ld・Id+ω・φ)2={-ω・(Lq+Lq')・Iq**}2+{ω・(Ld+Ld')・Id**+ω・φ}2
・・・(12)
Iq**=√{{Lq2Iq2+Ld2Id2+2Ld・Id・φ-(Ld+Ld')2・Id**2-2(Ld+Ld')・Id**・φ}/(Lq+Lq')2}
・・・(13)
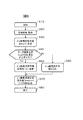
次に本発明の第3の実施形態について説明する。本実施形態では、モータ温度Tmを検出せずに、d軸電流指令補正値Id’およびq軸電流指令補正値Iq’を求める例について説明する。
Claims (7)
- 永久磁石を界磁源とするモータを駆動するためのインバータに接続され、入力されたトルク指令値に基づいて前記インバータの出力電圧を制御することで前記モータを制御するモータ制御装置であって、
前記トルク指令値に基づいて電流指令値を演算する電流指令生成部と、
前記電流指令値に基づいて前記インバータの出力電圧を制御するための電圧指令値を演算する電圧指令生成部と、
前記モータの温度上昇により前記モータへの印加電圧が上昇する場合に、前記電流指令値を補正して前記インバータの出力電圧を制限する電圧飽和抑制部と、を備えるモータ制御装置。 - 請求項1に記載のモータ制御装置において、
前記電圧飽和抑制部は、前記電流指令値に基づいて前記モータのq軸電圧を推定し、前記q軸電圧の推定結果が負である場合に、前記モータの温度上昇により前記モータへの印加電圧が上昇すると判断するモータ制御装置。 - 請求項1または2に記載のモータ制御装置において、
前記電圧飽和抑制部は、前記モータの温度に基づいて前記モータのインダクタンス変化量を演算し、演算した前記モータのインダクタンス変化量に基づいて前記電流指令値を補正するモータ制御装置。 - 請求項1乃至3のいずれか一項に記載のモータ制御装置において、
前記電圧飽和抑制部は、前記インバータの出力電圧が所定の出力制限値以下となり、かつ前記モータの出力トルクが前記トルク指令値と一致するように、前記電流指令値を補正するモータ制御装置。 - 永久磁石を界磁源とするモータを駆動するためのインバータに接続され、入力されたトルク指令値に基づいて前記インバータの出力電圧を制御することで前記モータを制御するモータ制御装置であって、
前記トルク指令値に基づいて電流指令値を演算する電流指令生成部と、
前記電流指令値に基づいて前記インバータの出力電圧を制御するための電圧指令値を演算する電圧指令生成部と、
前記モータの温度上昇により前記モータへの印加電圧が上昇する場合に、前記電流指令値を補正して前記インバータの出力電圧を制限する電圧飽和抑制部と、を備え、
前記電圧指令生成部は、前記電流指令値に基づいて非干渉電圧指令値を演算する非干渉制御部と、前記モータの電流値および前記電流指令値に基づいてPI電圧指令値を演算するPI制御部と、を有し、前記非干渉電圧指令値と前記PI電圧指令値とを加算することにより前記電圧指令値を演算するモータ制御装置。 - 請求項5に記載のモータ制御装置において、
前記電圧飽和抑制部は、前記電流指令値に基づいて前記モータのq軸電圧を推定し、前記q軸電圧の推定結果が負である場合に、前記モータの温度上昇により前記モータへの印加電圧が上昇すると判断するモータ制御装置。 - 請求項5または6に記載のモータ制御装置において、
前記電圧飽和抑制部は、前記PI電圧指令値に基づいて前記電流指令値を補正するモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015177562A JP6396869B2 (ja) | 2015-09-09 | 2015-09-09 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015177562A JP6396869B2 (ja) | 2015-09-09 | 2015-09-09 | モータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017055552A true JP2017055552A (ja) | 2017-03-16 |
| JP6396869B2 JP6396869B2 (ja) | 2018-09-26 |
Family
ID=58317766
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015177562A Active JP6396869B2 (ja) | 2015-09-09 | 2015-09-09 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6396869B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110611471A (zh) * | 2019-10-31 | 2019-12-24 | 中车青岛四方车辆研究所有限公司 | 三相异步电机输出转矩控制方法及控制装置 |
| CN111295831A (zh) * | 2017-08-29 | 2020-06-16 | Gkn汽车有限公司 | 用于对永久励磁式同步磁阻电机的场定向控制的方法 |
| US20200317178A1 (en) * | 2019-04-08 | 2020-10-08 | Safran Landing Systems | Method of powering an electromechanical brake actuator for an aircraft wheel |
| JP2021182866A (ja) * | 2017-12-28 | 2021-11-25 | 株式会社デンソー | 回転電機 |
| WO2021240883A1 (ja) * | 2020-05-28 | 2021-12-02 | 日立Astemo株式会社 | モータ制御装置およびモータ制御方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1118496A (ja) * | 1997-06-18 | 1999-01-22 | Hitachi Ltd | 電気車の制御装置および制御方法 |
| JP2002078390A (ja) * | 2000-08-31 | 2002-03-15 | Fuji Electric Co Ltd | 電動機の制御装置 |
| US20080036415A1 (en) * | 2006-08-09 | 2008-02-14 | Honda Motor Co., Ltd. | Controller for motor |
| WO2008047438A1 (fr) * | 2006-10-19 | 2008-04-24 | Mitsubishi Electric Corporation | Contrôleur vectoriel d'un moteur synchrone à aimant permanent |
| JP2009261066A (ja) * | 2008-04-14 | 2009-11-05 | Jtekt Corp | モータ制御装置および電動パワーステアリング装置 |
| JP5292995B2 (ja) * | 2008-08-22 | 2013-09-18 | 株式会社ジェイテクト | モータ制御装置及び電動パワーステアリング装置 |
-
2015
- 2015-09-09 JP JP2015177562A patent/JP6396869B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1118496A (ja) * | 1997-06-18 | 1999-01-22 | Hitachi Ltd | 電気車の制御装置および制御方法 |
| JP2002078390A (ja) * | 2000-08-31 | 2002-03-15 | Fuji Electric Co Ltd | 電動機の制御装置 |
| US20080036415A1 (en) * | 2006-08-09 | 2008-02-14 | Honda Motor Co., Ltd. | Controller for motor |
| JP2008043128A (ja) * | 2006-08-09 | 2008-02-21 | Honda Motor Co Ltd | 電動機の制御装置 |
| WO2008047438A1 (fr) * | 2006-10-19 | 2008-04-24 | Mitsubishi Electric Corporation | Contrôleur vectoriel d'un moteur synchrone à aimant permanent |
| JP2009261066A (ja) * | 2008-04-14 | 2009-11-05 | Jtekt Corp | モータ制御装置および電動パワーステアリング装置 |
| JP5292995B2 (ja) * | 2008-08-22 | 2013-09-18 | 株式会社ジェイテクト | モータ制御装置及び電動パワーステアリング装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111295831A (zh) * | 2017-08-29 | 2020-06-16 | Gkn汽车有限公司 | 用于对永久励磁式同步磁阻电机的场定向控制的方法 |
| JP2020532274A (ja) * | 2017-08-29 | 2020-11-05 | ジーケーエヌ オートモーティブ リミテッド | 永久励磁型同期リラクタンス機械の磁界方向制御のための方法 |
| US11177748B2 (en) * | 2017-08-29 | 2021-11-16 | Gkn Automotive Ltd. | Field-oriented control of a permanently excited synchronous reluctance machine |
| JP2021182866A (ja) * | 2017-12-28 | 2021-11-25 | 株式会社デンソー | 回転電機 |
| JP7259898B2 (ja) | 2017-12-28 | 2023-04-18 | 株式会社デンソー | 回転電機 |
| US20200317178A1 (en) * | 2019-04-08 | 2020-10-08 | Safran Landing Systems | Method of powering an electromechanical brake actuator for an aircraft wheel |
| US11691611B2 (en) * | 2019-04-08 | 2023-07-04 | Safran Landing Systems | Method of powering an electromechanical brake actuator for an aircraft wheel |
| CN110611471A (zh) * | 2019-10-31 | 2019-12-24 | 中车青岛四方车辆研究所有限公司 | 三相异步电机输出转矩控制方法及控制装置 |
| CN110611471B (zh) * | 2019-10-31 | 2021-01-22 | 中车青岛四方车辆研究所有限公司 | 三相异步电机输出转矩控制方法及控制装置 |
| WO2021240883A1 (ja) * | 2020-05-28 | 2021-12-02 | 日立Astemo株式会社 | モータ制御装置およびモータ制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6396869B2 (ja) | 2018-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5948613B2 (ja) | モータの制御装置 | |
| JP5035641B2 (ja) | 電動機駆動装置の制御装置 | |
| US9742333B2 (en) | Motor control device | |
| JP6396869B2 (ja) | モータ制御装置 | |
| JP5281339B2 (ja) | 同期電動機の駆動システム、及びこれに用いる制御装置 | |
| JP6275214B2 (ja) | 車両用回転電機の制御装置、及び制御方法 | |
| JP5549751B1 (ja) | インバータ装置、インバータ装置の制御方法、及び電動機ドライブシステム | |
| JP5803559B2 (ja) | 回転電機制御装置 | |
| JP2010200430A (ja) | 電動機の駆動制御装置 | |
| JP2010268566A (ja) | 独立車輪駆動電動車の制御装置 | |
| JP4522273B2 (ja) | モータ制御装置及びこれを有するモータ駆動システム | |
| JP2006141095A (ja) | 永久磁石型同期モータを駆動制御する装置 | |
| JP2015133802A (ja) | 同期電動機の制御装置及び制御方法 | |
| JP2017046399A (ja) | 電動機の制御装置 | |
| JP5929492B2 (ja) | 誘導機の制御装置 | |
| JP6206505B2 (ja) | 電動機の制御装置および制御方法 | |
| JP2013187931A (ja) | モータ制御装置 | |
| JP2012138982A (ja) | モータ制御装置及び電気機器 | |
| JP2018057077A (ja) | 電動機制御装置およびドライブシステム | |
| JP6358834B2 (ja) | ベクトル制御装置、それを組み込んだインバータ及びそれを組み込んだインバータとモータとのセット装置 | |
| JPWO2020100497A1 (ja) | モータ制御装置 | |
| JP6183194B2 (ja) | モータ制御装置 | |
| JP2010252492A (ja) | モータシステム | |
| JP2008017577A (ja) | 同期モータ制御装置 | |
| JP7073799B2 (ja) | モータ制御方法、及び、モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20170126 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170830 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180619 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180801 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180807 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180830 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6396869 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |