JP2017019399A - ハイブリッド車両制御装置 - Google Patents
ハイブリッド車両制御装置 Download PDFInfo
- Publication number
- JP2017019399A JP2017019399A JP2015138772A JP2015138772A JP2017019399A JP 2017019399 A JP2017019399 A JP 2017019399A JP 2015138772 A JP2015138772 A JP 2015138772A JP 2015138772 A JP2015138772 A JP 2015138772A JP 2017019399 A JP2017019399 A JP 2017019399A
- Authority
- JP
- Japan
- Prior art keywords
- generator
- engine
- rotational speed
- torque
- output request
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Abstract
【解決手段】ハイブリッド車両は、車両の駆動輪を駆動するモータと、モータの駆動用電力を発電する発電機と、駆動輪および発電機を駆動するエンジンと、エンジンと駆動輪との接続を断接するクラッチとを備える。回転速度制御手段は、クラッチによりエンジンと駆動輪との接続が切断された状態において、エンジンおよび発電機の目標回転速度Vgtと実回転速度Vgとの差分に基づいて発電機への出力要求トルクTgtを変更することによりエンジンおよび発電機の回転速度を制御する。変更後の出力要求トルクは、変更前の出力要求トルクから所定の変動制限値以内に設定される。
【選択図】図3
Description
このうち、シリーズモード(シリーズ方式)では、クラッチによりエンジンと駆動輪との間の接続を切断した上で、エンジンで発電機を駆動して電力を発生させ、その電力を駆動用バッテリの充電またはモータの駆動に充てる。
このようなクラッチ故障に対応するため、例えば下記特許文献1では、クラッチのオン固着故障を検出すると、ハイブリッド車両の走行モードをEVモードまたはパラレルモードのいずれかに設定する技術が開示されている。
例えば、ジェネレータ(発電機)回転速度フィードバック制御では、エンジンおよび発電機の目標回転速度と実回転速度とに差がある場合に、当該差分に応じた補正値を発電機への出力要求トルクに加算することにより実回転速度を目標回転速度に合わせる。
このような制御中にクラッチがオン固着故障すると、発電機の回転速度が駆動輪の回転速度に引きずられて変化するため、目標回転速度と実回転速度との差が大きくなり、トルク補正値によってエンジンの回転速度が急激に変動してハイブリッド車両に急激な加減速が生じる場合がある。
上述した従来技術では、クラッチの断接制御状態と発電機およびモータの回転速度との関係からクラッチの故障を検出した後にハイブリッド車両の走行モードを変更している。クラッチの故障発生から故障検出までには所定の判定時間が必要であり、この間に意図しない加減速が発生する場合があるという課題がある。
本発明は、このような事情に鑑みなされたものであり、その目的は、クラッチのオン固着故障時の車両の急激な加減速を防止することにある。
請求項2の発明にかかるハイブリッド車両制御装置は、前記変更後の出力要求トルクの上限値を、前記変更前の出力要求トルクに、前記エンジンの稼働状態に基づくエンジン公差値と、前記発電機の稼働状態に基づくジェネレータ公差値と、前記エンジンまたは前記発電機の目標回転加速度に所定の比例係数を乗じた値とを加算した値とし、前記変更後の出力要求トルクの下限値を、前記変更前の出力要求トルクから、前記エンジンの稼働状態に基づくエンジン公差値と、前記発電機の稼働状態に基づくジェネレータ公差値とを減じるとともに、前記エンジンまたは前記発電機の目標回転加速度に所定の比例係数を乗じた値を加算した値とする、ことを特徴とする。
請求項3の発明にかかるハイブリッド車両制御装置は、前記回転速度制御手段は、前記エンジンに対する出力要求トルクを、前記発電機に対する要求発電量に応じた必要発電トルクに設定するとともに、前記発電機に対する出力要求トルクを、前記目標回転速度と前記実回転速度との差分に基づく補正値で前記必要発電トルクを補正した値に設定して、前記エンジンおよび前記発電機の回転速度を制御する、ことを特徴とする。
請求項2の発明によれば、変更後の出力要求トルクを、変更前の出力要求トルクを中心にエンジン公差値やジェネレータ公差値、目標回転速度の変化率に合わせて設定することができ、クラッチ故障が生じていない場合などには適切にエンジンおよび発電機の回転速度を変更する上で有利となる。
請求項3の発明によれば、エンジンおよび発電機の目標回転速度と実回転速度とに差がある場合に、当該差分に応じた補正値を発電機への出力要求トルクに加算するジェネレータ回転速度フィードバック制御を行う。発電機はエンジンと比べて出力要求トルクの変更に対する応答性が高いので、より迅速に実回転速度を目標回転速度に合わせる上で有利となる。
本実施の形態では、ハイブリッド車両においてジェネレータ回転速度フィードバック制御を行う場合について説明する。
ハイブリッド車両20は、駆動輪(例えば前輪)36の駆動軸38を駆動するエンジン22およびモータ24を備えている。
エンジン22は、発電機28を駆動して発電させることが可能であるとともに、クラッチ23の締結時にはトランスミッション26を介して駆動輪36の駆動軸38を回転可能である。
ジェネレータインバータ34には、発電機28を制御するジェネレータコントロールユニット34Aが内蔵されており、ジェネレータコントロールユニット34Aはハイブリッド車両制御装置10(ECU)からの制御信号(後述する発電機28の出力要求トルクTgt)に基づいて発電機28の出力トルク(発電トルク)を制御する。
クラッチ23は、発電機28側の係合要素23Aおよび駆動輪36側の係合要素23Bからなる。
モータインバータ30には、モータ24を制御するモータコントロールユニット30Aが内蔵されており、モータコントロールユニット30Aは後述するハイブリッド車両制御装置10(ECU40)からの制御信号に基づいてモータ24の出力トルクを制御する。
駆動用バッテリ32の充電には、発電機28によって発電された電力を用いる他、図示しない充電端子に外部電源を接続し外部電力を供給することにより行われる。
本実施の形態では、ECU40がハイブリッド車両制御装置10として機能する。
ECU40は、ハイブリッド車両20全体の制御を司る制御部であり、CPU、制御プログラムなどを格納・記憶するROM、制御プログラムの作動領域としてのRAM、各種データを書き換え可能に保持するEEPROM、周辺回路等とのインターフェースをとるインターフェース部などを含んで構成される。
走行モード制御手段42は、ハイブリッド車両20の状態に応じて、走行モードをEVモード、シリーズモード、パラレルモードの間で切り替える。
EVモードでは、エンジン22を停止し、駆動用バッテリ32から供給される電力によってモータ24を駆動して走行する。
シリーズモードでは、クラッチ23を切断し、エンジン22の駆動力を全て発電機28に付与する。そして、発電機28によって発電された電力によりモータ24を駆動して走行させる。この時、発電機28の発電電力がモータ24に対する要求出力に足りない場合は、駆動用バッテリ32に蓄電された電力もモータ24の駆動に用いる。また、発電機28の発電電力がモータ24に対する要求出力よりも大きい場合には、余剰電力を駆動用バッテリ32に供給して駆動用バッテリ32を充電する。
パラレルモードでは、エンジン22の動力とモータ24の動力とを併せて駆動する。すなわち、クラッチ23を接続し、エンジン22の動力をトランスミッション26を介して駆動軸38に伝達して駆動輪36を駆動させるとともに、エンジン22により発電機28を回転させて発電した電力および駆動用バッテリ32から供給される電力によってモータ24を駆動して走行する。
走行モード制御手段42は、高速走行時のように、エンジン22の効率のよい領域では、走行モードをパラレルモードとする。また、パラレルモードを除く領域、すなわち中低速走行時には、駆動用バッテリ32の充電率に基づいてEVモードとシリーズモードとの間で切換える。
また、走行モード制御手段42は、駆動用バッテリ32の充電率が許容範囲より低下したときには、シリーズモードまたはパラレルモードでエンジン22を駆動して発電機28により発電を行い、駆動用バッテリ32を充電させる。
クラッチ23の故障には、クラッチ23が接続状態のまま固着して切断できないオン固着故障や、すべり等でクラッチ23を十分に接続できないオフ固着故障などがある。本実施の形態は、特にシリーズモード時(クラッチ23切断時)におけるオン固着故障に関連する。
クラッチ故障検出手段44は、クラッチ23の故障を、クラッチ23の係合要素23A,23Bのそれぞれの回転速度、およびクラッチ23への断接の制御信号に基づいて判断する。そして、クラッチ23に故障が生じている場合には、走行モード制御手段42が故障の種類に応じて走行モードを変更する。
本実施の形態では、回転速度制御手段46は、目標回転速度と実回転速度とに差分があった場合に、発電機28への出力要求トルクを変更するジェネレータ回転速度フィードバック制御を行うものとする。
すなわち、回転速度制御手段46は、エンジン22に対する出力要求トルクを、発電機28に対する要求発電量に応じた必要発電トルクに設定するとともに、発電機28に対する出力要求トルクを、目標回転速度と実回転速度との差分に基づく補正値で必要発電トルクを補正した値に設定して、エンジン22および発電機28の回転速度を制御する。
なお、本実施の形態では、車両加速側(力行側)のトルクを正、車両減速側(回生側)のトルクを負としている。発電機28の入力軸とエンジン22の出力軸とが減速ギアを介さず直結としているので、両者の回転速度は等しい。また、両者のトルクが逆符合かつ絶対値が等しい場合に釣り合い状態(回転加速度がゼロ)となる。
まず、回転速度制御手段46は、発電機28に対する要求発電量を得るために必要な発電機28のトルクである必要発電トルクTgdを算出する。必要発電トルクTgdは負の値である。
そして、エンジン22の出力要求トルクTetを、必要発電トルクTgdに合わせて設定する。すなわち、必要発電トルクTgdの正負を反転した値をエンジン22の出力要求トルクTetに設定する(Tet=−Tgd)。
本実施の形態では、補正値Aを必要発電トルクTgdに加えた値を、発電機28の出力要求トルクTgtとして設定する(Tgt=Tgd+A)。
補正値Aは、発電機28の目標回転速度Vgtと実回転速度Vgとの速度差ΔV(=Vgt−Vg)に、例えばPID(比例・積分・微分)制御則を適用して求める。
また、発電機28の出力要求トルクTgtを、必要発電トルクTgdに補正値Aを加算した値に設定する(Tgt=Tgd+A)ことによって、エンジン22および発電機28の実回転速度Vgと目標回転速度Vgtとの速度差ΔVが発生したときに、発電機28の出力要求トルクTgtが補正されるため、実回転速度Vgを目標回転速度Vgtに近づけることができる。
部品限界値とは、発電機28(またはエンジン22)の一般的な動作限界範囲であり、上述した回転速度制御手段46による変更とは別個に、通常予め一意に設定されている。
より詳細には、変更後の出力要求トルクTgbの上限値を、変更前の出力要求トルクTgaに、エンジン22の稼働状態に基づくエンジン公差値Deと、発電機28の稼働状態に基づくジェネレータ公差値Dgと、発電機28の目標回転加速度Agに所定の比例係数Kを乗じた値とを加算した値とする(Tgb≦Tga+De+Dg+K・Ag)。
また、変更後の出力要求トルクTgbの下限値を、変更前の出力要求トルクTgaから、エンジン22の稼働状態に基づくエンジン公差値Deと、発電機28の稼働状態に基づくジェネレータ公差値Dgとを減じるとともに、発電機28の目標回転加速度Agに所定の比例係数Kを乗じた値を加算した値とする(Tgb≧Tga−De−Dg+K・Ag)。
また、エンジン公差値Deは、エンジン22の冷却水温、出力トルク、回転速度等のパラメータにより変動する値であり、ジェネレータ公差値Dgは、発電機28の冷却水温、出力トルク、回転速度等のパラメータにより変動する値である。
回転速度制御手段46は、例えば上記のパラメータの実値からエンジン公差値Deやジェネレータ公差値Dgを特定するマップを記憶しておき、このマップを用いて公差値De,Dgを特定する。
また、発電機28の目標回転加速度Agに所定の比例係数Kを乗じた値とは、変化する目標回転速度に追従させるために、目標回転速度の変化率(すなわち目標回転加速度)に応じたトルクを加算するものである。なお、比例係数Kはエンジン22および発電機28の回転部分の慣性モーメントに対応する。
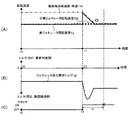
図3および図4は、本実施の形態にかかる車両においてクラッチ23の故障が生じた際の車両挙動を示す説明図である。
図3および図4において、符号Aは、駆動輪36の回転速度(車速)Vcおよび発電機28の回転速度(実回転速度Vgおよび目標回転速度Vgt)の時間変化を示している。
符号Bは、発電機28の出力要求トルクTgtの時間変化であり、出力要求トルクTgtの上限値を符号Tmx、下限値を符号Tminで示している。符号Cはクラッチ23の断接状態である。
なお、A図における発電機28の回転速度はギア比を考慮して駆動輪36の回転速度に換算した値としている。また、C図において、クラッチ故障検出手段44による故障判定に要する時間をtxとする。
発電機28(係合要素23A)の回転速度は、実回転速度Vgと目標回転速度Vgtとが一致している。また、駆動輪36(係合要素23B)の回転速度Vcは、発電機28の回転速度よりも遅くなっている(Vc<Vg)。
また、発電機28の出力要求トルクTgtは回生側(負)の値を取り、エンジン22の出力要求トルクTetを正負反転した値となっている。
このように発電機28の実回転速度Vgが変化するのは、車体全体を移動させる駆動輪36の方が発電機28と比べて慣性が大きいためである。
よって、発電機28の実回転速度Vgと目標回転速度Vgtとの間に差分が生じ、ジェネレータ回転速度フィードバック制御により発電機28の出力要求トルクTgtが変化する。すなわち、発電機28の実回転速度Vgが目標回転速度Vgtよりも遅くなったため、発電機28の出力要求トルクTgtに正の補正値Aが加算され、発電機28の出力要求トルクTgtの絶対値が減少する。
このため、発電機28の実回転速度Vgと目標回転速度Vgtとに差分がある状態が一定期間継続するが、故障発生から時刻tx後にクラッチの故障判定が行われると、例えば走行モードがEVモードやパラレルモードに移行され、運転者の意図通りの車両走行が可能となる。
図3と同様に、初期時刻t0ではクラッチ23はオフ(切断)状態であり、発電機28(係合要素23A)の回転速度は、実回転速度Vgと目標回転速度Vgtとが一致している。
時刻t1にクラッチ23のオン固着故障が生じると、クラッチ23の係合要素23A,23Bが接続し、発電機28の実回転速度Vgが駆動輪36の回転速度Vcと一致する(Vc=Vg)。
よって、発電機28の実回転速度Vgが目標回転速度Vgtよりも速くなり、発電機28の出力要求トルクTgtに負の補正値Aが加算され、発電機28の出力要求トルクTgtの絶対値が増加する。
そして、故障発生から時刻tx後にクラッチの故障判定が行われると、例えば走行モードがEVモードやパラレルモードに移行され、運転者の意図通りの車両走行が可能となる。
より詳細には、図5は駆動輪36の回転速度Vcが発電機28の回転速度よりも遅い場合(Vc<Vg)であり、図6は駆動輪36の回転速度Vcが発電機28の回転速度よりも速い場合(Vc>Vg)である。
図5および図6の各符号は、図3および図4と同様である。
図5、図6も図3、図4と同様に、初期時刻t0ではクラッチ23はオフ(切断)状態であり、発電機28(係合要素23A)の回転速度は、実回転速度Vgと目標回転速度Vgtとが一致している。
時刻t1にクラッチ23のオン固着故障が生じると、クラッチ23の係合要素23A,22Bが接続し、発電機28の実回転速度Vgが駆動輪36の回転速度Vcと一致する(Vc=Vg)。
よって、図5においては、発電機28の実回転速度Vgが目標回転速度Vgtよりも遅くなり、発電機28の出力要求トルクTgtに正の補正値Aが加算され、発電機28の出力要求トルクTgtの絶対値が減少し、場合によっては力行側(正)のトルクとなる。
発電機28の出力要求トルクTgtの絶対値が減少することによって、エンジン22の負荷が軽減されて余剰の力行トルクが発生し、この余剰トルクが駆動軸38側に伝達されて駆動輪36の回転速度、すなわち車速を急激に増加させ、車両が急加速状態となる。
発電機28の出力要求トルクTgtの絶対値が増加することによって、エンジン22の出力要求トルクTetを全て吸収しても余剰の回生トルクが発生し、この余剰トルクが駆動軸38側から伝達されて駆動輪36の回転速度、すなわち車速を急激に減少させ、車両が急減速状態となる。
これにより、クラッチ23の故障時など発電機28の回転速度が大きく変動した際に、これに追従して車両が急激に加減速するのを防止する上で有利となる。
ただし本発明は、エンジン回転速度フィードバック制御を行う車両にも適用可能である。
Claims (3)
- 車両の駆動輪を駆動するモータと、前記モータの駆動用電力を発電する発電機と、前記駆動輪および発電機を駆動するエンジンと、前記エンジンと前記駆動輪との接続を断接するクラッチと、を備えるハイブリッド車両を制御するハイブリッド車両制御装置であって、
前記エンジンまたは前記発電機の目標回転速度と実回転速度との差分に基づいて、前記エンジンまたは前記発電機への出力要求トルクを変更することにより、前記エンジンおよび前記発電機の回転速度を制御する回転速度制御手段を備え、
変更後の出力要求トルクは、変更前の出力要求トルクから部品限界値とは異なる所定の変動制限値以内に設定される、
ことを特徴とするハイブリッド車両制御装置。 - 前記変更後の出力要求トルクの上限値を、前記変更前の出力要求トルクに、前記エンジンの稼働状態に基づくエンジン公差値と、前記発電機の稼働状態に基づくジェネレータ公差値と、前記エンジンまたは前記発電機の目標回転加速度に所定の比例係数を乗じた値とを加算した値とし、
前記変更後の出力要求トルクの下限値を、前記変更前の出力要求トルクから、前記エンジンの稼働状態に基づくエンジン公差値と、前記発電機の稼働状態に基づくジェネレータ公差値とを減じるとともに、前記エンジンまたは前記発電機の目標回転加速度に所定の比例係数を乗じた値を加算した値とする、
ことを特徴とする請求項1記載のハイブリッド車両制御装置。 - 前記回転速度制御手段は、前記エンジンに対する出力要求トルクを、前記発電機に対する要求発電量に応じた必要発電トルクに設定するとともに、前記発電機に対する出力要求トルクを、前記目標回転速度と前記実回転速度との差分に基づく補正値で前記必要発電トルクを補正した値に設定して、前記エンジンおよび前記発電機の回転速度を制御する、
ことを特徴とする請求項1または2記載のハイブリッド車両制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015138772A JP6561642B2 (ja) | 2015-07-10 | 2015-07-10 | ハイブリッド車両制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015138772A JP6561642B2 (ja) | 2015-07-10 | 2015-07-10 | ハイブリッド車両制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017019399A true JP2017019399A (ja) | 2017-01-26 |
| JP6561642B2 JP6561642B2 (ja) | 2019-08-21 |
Family
ID=57887550
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015138772A Active JP6561642B2 (ja) | 2015-07-10 | 2015-07-10 | ハイブリッド車両制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6561642B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190001996A (ko) * | 2017-06-29 | 2019-01-08 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| CN113335262A (zh) * | 2021-07-19 | 2021-09-03 | 中国第一汽车股份有限公司 | 混合动力汽车驱动模式切换的控制方法、车辆及存储介质 |
| CN113500991A (zh) * | 2021-06-30 | 2021-10-15 | 东风商用车有限公司 | 发动机控制方法、装置、设备及可读存储介质 |
| JP7319893B2 (ja) | 2019-11-06 | 2023-08-02 | 株式会社Subaru | 車両用制御装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013189136A (ja) * | 2012-03-14 | 2013-09-26 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2014133458A (ja) * | 2013-01-09 | 2014-07-24 | Mitsubishi Motors Corp | ハイブリッド車の作動制御装置 |
-
2015
- 2015-07-10 JP JP2015138772A patent/JP6561642B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013189136A (ja) * | 2012-03-14 | 2013-09-26 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2014133458A (ja) * | 2013-01-09 | 2014-07-24 | Mitsubishi Motors Corp | ハイブリッド車の作動制御装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190001996A (ko) * | 2017-06-29 | 2019-01-08 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| CN109204293A (zh) * | 2017-06-29 | 2019-01-15 | 现代自动车株式会社 | 车辆及其控制方法 |
| KR102278348B1 (ko) * | 2017-06-29 | 2021-07-19 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| JP7319893B2 (ja) | 2019-11-06 | 2023-08-02 | 株式会社Subaru | 車両用制御装置 |
| CN113500991A (zh) * | 2021-06-30 | 2021-10-15 | 东风商用车有限公司 | 发动机控制方法、装置、设备及可读存储介质 |
| CN113335262A (zh) * | 2021-07-19 | 2021-09-03 | 中国第一汽车股份有限公司 | 混合动力汽车驱动模式切换的控制方法、车辆及存储介质 |
| CN113335262B (zh) * | 2021-07-19 | 2022-08-23 | 中国第一汽车股份有限公司 | 混合动力汽车驱动模式切换的控制方法、车辆及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6561642B2 (ja) | 2019-08-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10160441B2 (en) | Power controller of hybrid vehicle | |
| EP2439094B1 (en) | Hybrid vehicle | |
| JP6070934B2 (ja) | ハイブリッド車の走行モード切換制御装置 | |
| EP2746082B1 (en) | Traveling mode switching controller of hybrid electric vehicle | |
| US10017173B2 (en) | Apparatus and method for controlling torque intervention of hybrid vehicle | |
| EP3225451B1 (en) | Controller of hybrid vehicle | |
| US9871480B2 (en) | Power supply control apparatus, vehicle and method of controlling power supply | |
| WO2009139305A1 (ja) | 車両制御装置 | |
| US10661782B2 (en) | Operation control system for hybrid vehicle | |
| CN108583364B (zh) | 车辆和车辆的控制方法 | |
| JP6561642B2 (ja) | ハイブリッド車両制御装置 | |
| CN102431555B (zh) | 用于车辆中速度控制的积分器饱和的单侧检测和禁用 | |
| JP5316576B2 (ja) | 車両制御装置 | |
| US8952657B2 (en) | Battery protector | |
| KR20190138118A (ko) | 친환경자동차의 구동 토크 지령 생성 장치 및 방법 | |
| JP6156619B2 (ja) | ハイブリッド車の作動制御装置 | |
| JP6582650B2 (ja) | ハイブリッド車両制御装置 | |
| KR102250754B1 (ko) | 하이브리드 전기 자동차의 스마트 크루즈 컨트롤 제어 방법 | |
| KR20200000068A (ko) | 친환경자동차의 구동 토크 지령 생성 장치 및 방법 | |
| JP2018027733A (ja) | ハイブリッド車両の充電制御装置 | |
| JP6733283B2 (ja) | ハイブリッド車両 | |
| JP2016144366A (ja) | 電動車両 | |
| JP2013216117A (ja) | 車両の走行可能距離算出装置 | |
| WO2023182210A1 (ja) | ハイブリッド車の振動抑制制御装置 | |
| CN117698679A (zh) | 混合动力电动车辆及控制其发动机速度的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180622 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190424 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190708 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6561642 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |