JP2017015706A - ピペット針の接触を検出する方法 - Google Patents
ピペット針の接触を検出する方法 Download PDFInfo
- Publication number
- JP2017015706A JP2017015706A JP2016131238A JP2016131238A JP2017015706A JP 2017015706 A JP2017015706 A JP 2017015706A JP 2016131238 A JP2016131238 A JP 2016131238A JP 2016131238 A JP2016131238 A JP 2016131238A JP 2017015706 A JP2017015706 A JP 2017015706A
- Authority
- JP
- Japan
- Prior art keywords
- variable
- predetermined
- pipette needle
- contact
- reference potential
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/02—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating impedance
- G01N27/22—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating impedance by investigating capacitance
- G01N27/228—Circuits therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
- G01N33/483—Physical analysis of biological material
- G01N33/487—Physical analysis of biological material of liquid biological material
- G01N33/48785—Electrical and electronic details of measuring devices for physical analysis of liquid biological material not specific to a particular test method, e.g. user interface or power supply
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1009—Characterised by arrangements for controlling the aspiration or dispense of liquids
- G01N35/1011—Control of the position or alignment of the transfer device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1009—Characterised by arrangements for controlling the aspiration or dispense of liquids
- G01N2035/1025—Fluid level sensing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N2035/1027—General features of the devices
- G01N2035/1032—Dilution or aliquotting
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N2035/1027—General features of the devices
- G01N2035/1034—Transferring microquantities of liquid
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Pathology (AREA)
- Immunology (AREA)
- General Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Biochemistry (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Medicinal Chemistry (AREA)
- Food Science & Technology (AREA)
- Urology & Nephrology (AREA)
- Molecular Biology (AREA)
- Hematology (AREA)
- Human Computer Interaction (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Sampling And Sample Adjustment (AREA)
- Investigating Or Analyzing Materials By The Use Of Electric Means (AREA)
Abstract
【解決手段】ピペット針18は、ピペット針18と基準電位との間で印加される電圧または電流によって周期的に帯電され、それに続くピペット針18と基準電位との間の電気的接続によって再び放電され、ピペット針18と基準電位との間の電流容量の特性変数が、帯電および/または放電の間に検出されるいくつかの測定値から確立され、変数の時間曲線は、いくつかの所定の基準に基づいて継続的に監視され、所定の基準が満たされた場合に接触信号が生成される。
【選択図】図2
Description
ピペット針が、ピペット針と基準電位との間で印加される電圧または電流によって周期的に帯電され、それに続くピペット針と基準電位との間の電気的接続によって再び放電され、
ピペット針と基準電位との間の電流容量の特性変数が、帯電および/または放電の間に検出されるいくつかの測定変数から確立され、
変数の時間曲線がいくつかの所定の基準に基づいて継続的に監視され、所定の基準が満たされた場合に接触信号が生成されることによって、達成される。
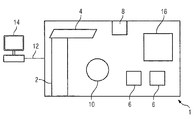
2 供給レール
4 ピペッティング装置
6 測定機器
8 キュベット収納部
10 試薬収納部
12 データ線
14 コンピュータ
16 ピペッティングデバイス
18 ピペット針
20 ホルダ
22 移送アーム
24 容器
26 プリント回路基板
28 電気的接続
30 接続
32 制御装置
34、36、38、40、42 容量信号曲線の領域
A 移動方向
Claims (15)
- インビトロ診断システム(1)におけるピペット針の接触を検出する方法であって、
前記ピペット針(18)は、ピペット針(18)と基準電位との間で印加される電圧または電流によって周期的に帯電され、それに続く前記ピペット針(18)と基準電位との間の電気的接続によって再び放電され、
ピペット針(18)と基準電位との間の電流容量の特性変数が、帯電および/または放電の間に検出されるいくつかの測定値から確立され、
変数の時間曲線はいくつかの所定の基準に基づいて継続的に監視され、所定の基準が満たされた場合に接触信号が生成される、前記方法。 - 所定の基準は、変数が所定の期間内に最小値分増加することによって与えられる、請求項1に記載の方法。
- 所定の期間は10ms未満、特に5ms未満である、請求項2に記載の方法。
- 固定の最小値が予め定められる、請求項2または3に記載の方法。
- 最小値は、変数のノイズの強度に応じて決定される、請求項2または3に記載の方法。
- 追加の基準は、時間内で所定の期間に続く第2の所定の期間に関して、変数がある範囲内で一定のままであることによって与えられる、請求項2〜5のいずれか1項に記載の方法。
- 第2の所定の期間は10ms超過である、請求項6に記載の方法。
- 固定範囲が予め定められる、請求項6または7に記載の方法。
- 範囲は、変数のノイズの強度に応じて決定される、請求項6または7に記載の方法。
- 変数を確立するとき、時間平均値が形成される、請求項1〜9のいずれか1項に記載の方法。
- 変数の所定の第1の基準値未満であった場合、および/または変数の所定の第2の基準値を超過した場合に、誤差信号が出力される、請求項1〜10のいずれか1項に記載の方法。
- 所定の期間内における帯電および放電プロセスの数は、ピペット針(18)と基準電位との間の容量に対する特性変数として使用される、請求項1〜11のいずれか1項に記載の方法。
- 帯電は定電流源を用いて実行され、所定の電圧に達すると放電が開始され、ゼロ電圧に達した後に新たな帯電によって新しいサイクルが開始される、請求項12に記載の方法。
- インビトロ診断システム(1)の接触検出装置であって、定電流源と、ピペット針と、抵抗器と、比較器とを含み、請求項1〜13のいずれか1項に記載の方法を実行するように具体化される、前記接触検出装置。
- 請求項14に記載の接触検出装置を含む、インビトロ診断システム(1)。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15175186.4 | 2015-07-03 | ||
| EP15175186.4A EP3112861B1 (de) | 2015-07-03 | 2015-07-03 | Verfahren zur berührungserkennung einer pipettiernadel |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017015706A true JP2017015706A (ja) | 2017-01-19 |
| JP2017015706A5 JP2017015706A5 (ja) | 2020-11-05 |
| JP6945973B2 JP6945973B2 (ja) | 2021-10-06 |
Family
ID=53540618
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016131238A Active JP6945973B2 (ja) | 2015-07-03 | 2016-07-01 | ピペット針の接触を検出する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9863905B2 (ja) |
| EP (1) | EP3112861B1 (ja) |
| JP (1) | JP6945973B2 (ja) |
| CN (1) | CN106324270B (ja) |
| ES (1) | ES2699894T3 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019215264A (ja) * | 2018-06-13 | 2019-12-19 | 日本電子株式会社 | 分注ユニット、自動分析装置及び液面検出判定方法 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170228752A1 (en) * | 2016-02-08 | 2017-08-10 | Mastercard International Incorporated | Determining and offering context based rewards |
| WO2017197116A1 (en) * | 2016-05-12 | 2017-11-16 | Siemens Healthcare Diagnostics Inc. | Clinical analyzer probe crash detection mechanism and process |
| CN109030096A (zh) * | 2018-06-06 | 2018-12-18 | 迈克医疗电子有限公司 | 取液测试方法及装置 |
| CN109030097B (zh) * | 2018-06-06 | 2023-04-18 | 迈克医疗电子有限公司 | 取液测试方法及装置 |
| CN109030099B (zh) * | 2018-06-06 | 2021-09-24 | 迈克医疗电子有限公司 | 取液测试方法及装置 |
| CN109030095B (zh) * | 2018-06-06 | 2021-08-31 | 迈克医疗电子有限公司 | 取液测试方法及装置 |
| CN109030098A (zh) * | 2018-06-06 | 2018-12-18 | 迈克医疗电子有限公司 | 取液测试方法及装置 |
| US11815523B2 (en) | 2020-10-07 | 2023-11-14 | Siemens Healthcare Diagnostics Inc. | Multi-point filtering liquid level detection methods and apparatus |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09133686A (ja) * | 1995-11-10 | 1997-05-20 | Tosoh Corp | 液面検出装置および検出方法 |
| JP2000055713A (ja) * | 1998-08-07 | 2000-02-25 | Hitachi Ltd | 液面検出装置 |
| JP2000171470A (ja) * | 1998-12-07 | 2000-06-23 | Hitachi Ltd | 自動分析装置 |
| US20060207322A1 (en) * | 2005-03-21 | 2006-09-21 | Krufka Frank S | Method and apparatus for capacitively determining the uppermost level of a liquid in a container |
| JP2008070264A (ja) * | 2006-09-14 | 2008-03-27 | Aloka Co Ltd | 分注装置およびそのノズルの降下動作の制御方法 |
| JP2011013005A (ja) * | 2009-06-30 | 2011-01-20 | Beckman Coulter Inc | 液面検知機構、自動分析装置、および液面検知方法 |
| JP2011166240A (ja) * | 2010-02-04 | 2011-08-25 | Tokai Rika Co Ltd | 静電容量検出方式および静電容量検出装置 |
| JP2012037236A (ja) * | 2009-03-23 | 2012-02-23 | Beckman Coulter Inc | 分注装置、分析装置および液面検知方法 |
| JP2013516600A (ja) * | 2009-12-30 | 2013-05-13 | テカン・トレーディング・アクチェンゲゼルシャフト | 相界面を検出する方法および装置、並びにこれらを備えた実験用機器 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4326851A (en) * | 1980-10-24 | 1982-04-27 | Coulter Electronics, Inc. | Level sensor apparatus and method |
| US5178019A (en) * | 1991-03-26 | 1993-01-12 | Akzo N.V. | Heated liquid sampling probe for an automated sampling apparatus |
| US5365783A (en) * | 1993-04-30 | 1994-11-22 | Packard Instrument Company, Inc. | Capacitive sensing system and technique |
| US5648727A (en) * | 1995-10-24 | 1997-07-15 | Dpc Cirrus Inc. | Capacitive level sensing pipette probe |
| DE19750642C2 (de) * | 1996-11-19 | 1998-11-26 | Hitachi Ltd | Analysator mit Pipettiersonde |
| EP0913671A1 (de) * | 1997-10-29 | 1999-05-06 | Roche Diagnostics GmbH | Verfahren und Vorrichtung zum Flüssigkeitstransfer mit einem Analysegerät |
| AU2005211568B2 (en) * | 2000-02-29 | 2007-06-07 | Gen-Probe Incorporated | Fluid dispense and fluid surface verification system and method |
| US7191647B2 (en) * | 2003-10-30 | 2007-03-20 | Perkinelmer Las, Inc. | Method and apparatus to reject electrical interference in a capacitive liquid level sensor system |
| EP1596169B1 (en) * | 2004-05-14 | 2012-05-30 | F. Hoffmann-La Roche AG | Level sensor apparatus for detecting contact of a pipetting needle with a liquid in a vessel |
| DE102006052833A1 (de) * | 2006-11-09 | 2008-05-15 | Diasys Diagnostic Systems Gmbh | Verfahren zum Feststellen einer Verstopfung, eines Koagels oder eines Pfropfens an der Aufnahmeöffnung einer Dosiernadel |
| EP2741087B1 (en) * | 2012-12-04 | 2019-10-02 | F. Hoffmann-La Roche AG | Method and system for fluid surface detection |
-
2015
- 2015-07-03 EP EP15175186.4A patent/EP3112861B1/de active Active
- 2015-07-03 ES ES15175186T patent/ES2699894T3/es active Active
-
2016
- 2016-06-27 CN CN201610478629.6A patent/CN106324270B/zh active Active
- 2016-06-30 US US15/199,970 patent/US9863905B2/en active Active
- 2016-07-01 JP JP2016131238A patent/JP6945973B2/ja active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09133686A (ja) * | 1995-11-10 | 1997-05-20 | Tosoh Corp | 液面検出装置および検出方法 |
| JP2000055713A (ja) * | 1998-08-07 | 2000-02-25 | Hitachi Ltd | 液面検出装置 |
| JP2000171470A (ja) * | 1998-12-07 | 2000-06-23 | Hitachi Ltd | 自動分析装置 |
| US20060207322A1 (en) * | 2005-03-21 | 2006-09-21 | Krufka Frank S | Method and apparatus for capacitively determining the uppermost level of a liquid in a container |
| JP2008070264A (ja) * | 2006-09-14 | 2008-03-27 | Aloka Co Ltd | 分注装置およびそのノズルの降下動作の制御方法 |
| JP2012037236A (ja) * | 2009-03-23 | 2012-02-23 | Beckman Coulter Inc | 分注装置、分析装置および液面検知方法 |
| JP2011013005A (ja) * | 2009-06-30 | 2011-01-20 | Beckman Coulter Inc | 液面検知機構、自動分析装置、および液面検知方法 |
| JP2013516600A (ja) * | 2009-12-30 | 2013-05-13 | テカン・トレーディング・アクチェンゲゼルシャフト | 相界面を検出する方法および装置、並びにこれらを備えた実験用機器 |
| JP2011166240A (ja) * | 2010-02-04 | 2011-08-25 | Tokai Rika Co Ltd | 静電容量検出方式および静電容量検出装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019215264A (ja) * | 2018-06-13 | 2019-12-19 | 日本電子株式会社 | 分注ユニット、自動分析装置及び液面検出判定方法 |
| JP7105112B2 (ja) | 2018-06-13 | 2022-07-22 | 日本電子株式会社 | 分注ユニット、自動分析装置及び液面検出判定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2699894T3 (es) | 2019-02-13 |
| EP3112861B1 (de) | 2018-08-29 |
| CN106324270A (zh) | 2017-01-11 |
| US20170003242A1 (en) | 2017-01-05 |
| EP3112861A1 (de) | 2017-01-04 |
| US9863905B2 (en) | 2018-01-09 |
| JP6945973B2 (ja) | 2021-10-06 |
| CN106324270B (zh) | 2020-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6945973B2 (ja) | ピペット針の接触を検出する方法 | |
| US9335200B2 (en) | Method and apparatus for detecting phase boundaries and correspondingly equipped laboratory device | |
| US7823447B2 (en) | Method and apparatus for sensing a liquid level | |
| JP4837310B2 (ja) | 電気容量モニタリングを使用する液体の計測 | |
| US9766109B2 (en) | Capacitive liquid level sensor | |
| CN104977062B (zh) | 用于液体的自动化分类的方法和设备 | |
| KR100540032B1 (ko) | 액체-프로브 접촉을 결정하기 위한 기구 및 방법 | |
| CN103597359B (zh) | 自动分析装置 | |
| US20100028213A1 (en) | Method of identifying a blockage, a coagulum or a clot at the receiving opening of a dosing needle | |
| CN105300475A (zh) | 用于区分泡沫和/或液体接触的方法和设备 | |
| JP2015203699A5 (ja) | ||
| CN106225877B (zh) | 一种用于检测泡沫边界的方法和相应地装备的装置 | |
| US9074919B2 (en) | Method of device for testing a capacitively operating measuring device, which is designed for the detection of phase boundaries, and correspondingly equipped laboratory apparatus | |
| US20110102004A1 (en) | Method for testing a laboratory device and correspondingly equipped laboratory device | |
| US8936765B2 (en) | Automatic analyzer | |
| JP2016014578A (ja) | 自動分析装置 | |
| JP2013185912A (ja) | 自動分析装置 | |
| JP6563114B2 (ja) | 自動分析装置 | |
| US20230191390A1 (en) | Method and device for detecting contact of a pipette tip with a liquid as well as a laboratory system with such a device | |
| JP2009281877A (ja) | 分注装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190610 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200623 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20200915 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210302 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210511 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210817 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210915 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6945973 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |