JP2017015255A - 電気静油圧アクチュエータおよび油圧アクチュエータの制御・減衰方法 - Google Patents
電気静油圧アクチュエータおよび油圧アクチュエータの制御・減衰方法 Download PDFInfo
- Publication number
- JP2017015255A JP2017015255A JP2016119441A JP2016119441A JP2017015255A JP 2017015255 A JP2017015255 A JP 2017015255A JP 2016119441 A JP2016119441 A JP 2016119441A JP 2016119441 A JP2016119441 A JP 2016119441A JP 2017015255 A JP2017015255 A JP 2017015255A
- Authority
- JP
- Japan
- Prior art keywords
- pump
- movable member
- flow path
- electric motor
- hydraulic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/24—Transmitting means
- B64C13/38—Transmitting means with power amplification
- B64C13/50—Transmitting means with power amplification using electrical energy
- B64C13/504—Transmitting means with power amplification using electrical energy using electro-hydrostatic actuators [EHA's]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/24—Transmitting means
- B64C13/26—Transmitting means without power amplification or where power amplification is irrelevant
- B64C13/28—Transmitting means without power amplification or where power amplification is irrelevant mechanical
- B64C13/341—Transmitting means without power amplification or where power amplification is irrelevant mechanical having duplication or stand-by provisions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/24—Transmitting means
- B64C13/38—Transmitting means with power amplification
- B64C13/40—Transmitting means with power amplification using fluid pressure
- B64C13/42—Transmitting means with power amplification using fluid pressure having duplication or stand-by provisions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/24—Transmitting means
- B64C13/38—Transmitting means with power amplification
- B64C13/50—Transmitting means with power amplification using electrical energy
- B64C13/505—Transmitting means with power amplification using electrical energy having duplication or stand-by provisions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B1/00—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders
- F04B1/12—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis
- F04B1/122—Details or component parts, e.g. valves, sealings or lubrication means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B1/00—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders
- F04B1/12—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis
- F04B1/14—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis having stationary cylinders
- F04B1/141—Details or component parts
- F04B1/143—Cylinders
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B1/00—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders
- F04B1/12—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis
- F04B1/14—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis having stationary cylinders
- F04B1/141—Details or component parts
- F04B1/145—Housings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B1/00—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders
- F04B1/12—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis
- F04B1/14—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis having stationary cylinders
- F04B1/141—Details or component parts
- F04B1/146—Swash plates; Actuating elements
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B1/00—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders
- F04B1/12—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis
- F04B1/20—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis having rotary cylinder block
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
- F04B17/03—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/22—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00 by means of valves
- F04B49/24—Bypassing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/024—Systems essentially incorporating special features for controlling the speed or actuating force of an output member by means of differential connection of the servomotor lines, e.g. regenerative circuits
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B20/00—Safety arrangements for fluid actuator systems; Applications of safety devices in fluid actuator systems; Emergency measures for fluid actuator systems
- F15B20/002—Electrical failure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B7/00—Systems in which the movement produced is definitely related to the output of a volumetric pump; Telemotors
- F15B7/005—With rotary or crank input
- F15B7/006—Rotary pump input
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/024—Systems essentially incorporating special features for controlling the speed or actuating force of an output member by means of differential connection of the servomotor lines, e.g. regenerative circuits
- F15B2011/0243—Systems essentially incorporating special features for controlling the speed or actuating force of an output member by means of differential connection of the servomotor lines, e.g. regenerative circuits the regenerative circuit being activated or deactivated automatically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20507—Type of prime mover
- F15B2211/20515—Electric motor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20561—Type of pump reversible
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/27—Directional control by means of the pressure source
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/305—Directional control characterised by the type of valves
- F15B2211/3056—Assemblies of multiple valves
- F15B2211/30565—Assemblies of multiple valves having multiple valves for a single output member, e.g. for creating higher valve function by use of multiple valves like two 2/2-valves replacing a 5/3-valve
- F15B2211/3058—Assemblies of multiple valves having multiple valves for a single output member, e.g. for creating higher valve function by use of multiple valves like two 2/2-valves replacing a 5/3-valve having additional valves for interconnecting the fluid chambers of a double-acting actuator, e.g. for regeneration mode or for floating mode
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/315—Directional control characterised by the connections of the valve or valves in the circuit
- F15B2211/31523—Directional control characterised by the connections of the valve or valves in the circuit being connected to a pressure source and an output member
- F15B2211/31529—Directional control characterised by the connections of the valve or valves in the circuit being connected to a pressure source and an output member having a single pressure source and a single output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/32—Directional control characterised by the type of actuation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/32—Directional control characterised by the type of actuation
- F15B2211/327—Directional control characterised by the type of actuation electrically or electronically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/625—Accumulators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6658—Control using different modes, e.g. four-quadrant-operation, working mode and transportation mode
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/705—Output members, e.g. hydraulic motors or cylinders or control therefor characterised by the type of output members or actuators
- F15B2211/7051—Linear output members
- F15B2211/7053—Double-acting output members
- F15B2211/7054—Having equal piston areas
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/40—Weight reduction
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Actuator (AREA)
- Reciprocating Pumps (AREA)
- Fluid-Pressure Circuits (AREA)
- Control Of Positive-Displacement Pumps (AREA)
- Electromagnetic Pumps, Or The Like (AREA)
- Magnetically Actuated Valves (AREA)
Abstract
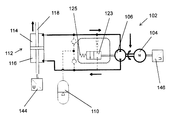
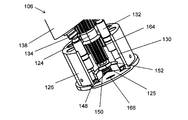
【解決手段】電気静油圧アクチュエータ(102)は、油圧ポンプ(106)、及び油圧ポンプを駆動して油圧アクチュエータ(112)に作動流体を供給する電気モーター(104)を備える。油圧ポンプは、作動流体の入口及び出口と、入口と出口の間に配置された能動的な流体流路と、を備えており、油圧ポンプが電気モーターによって駆動されている能動動作モード時に、作動流体が入口から吸入されるとともに出口から吐出される。油圧ポンプは、油圧ポンプの入口と出口の間に配置されたバイパス流路をさらに備え、減衰動作モード時に、作動流体が入口と出口の間を両方向に自由に流れることを可能にする。電気モーターは、バイパス流路を閉塞する閉塞位置と、バイパス流路を解放する位置と、の間で電気モーター内で移動するように配置された可動部材(148)を備える。
【選択図】図7
Description
Claims (15)
- 油圧ポンプと、前記油圧ポンプを駆動して油圧アクチュエータに作動流体を供給する電気モーターと、を備え、
前記油圧ポンプは、作動流体の入口及び出口と、前記入口と前記出口の間に配置された能動的な流体流路と、を備え、前記油圧ポンプが前記電気モーターによって駆動されている能動動作モード時に、作動流体が能動的に前記入口から吸入されるとともに前記出口から吐出され、
前記油圧ポンプは、前記油圧ポンプの入口と出口の間に配置されたバイパス流路をさらに備え、減衰動作モード時に、作動流体が前記入口と前記出口の間を両方向に自由に流れることが可能となっており、
前記電気モーターは、該電気モーター内で移動するように配置された可動部材を備え、前記能動動作モード時において前記油圧ポンプを駆動するように前記電気モーターが励磁されているときに、前記可動部材が、前記バイパス流路を閉塞するように機能する閉塞位置となり、前記減衰動作モード時において前記電気モーターが励磁されていないときに、前記可動部材が前記電気モーター内で移動して前記バイパス流路を開放する、電気静油圧アクチュエータ。 - 前記可動部材は、前記電気モーター内で軸方向に移動して前記バイパス流路を開放するように配置されている、請求項1に記載の電気静油圧アクチュエータ。
- 前記油圧ポンプが前記電気モーターによって駆動されていないときに、前記可動部材を自動的に移動させて前記バイパス流路を開放する、請求項1または請求項2に記載の電気静油圧アクチュエータ。
- 前記油圧ポンプは、前記可動部材を移動させることにより、前記油圧ポンプが前記電気モーターによって駆動されていないときに前記バイパス流路を開放するように配置された弾性部材を備える、請求項3に記載の電気静油圧アクチュエータ。
- 前記電気モーターは、前記可動部材を前記閉塞位置に保持する電磁石機構を備える、請求項1〜請求項4のいずれか一項に記載の電気静油圧アクチュエータ。
- 前記電磁石機構は、前記可動部材を磁化するように配置された1つまたは複数の追加コイルを備える、請求項5に記載の電気静油圧アクチュエータ。
- 前記バイパス流路の大きさは、前記油圧ポンプの使用中、所望の減衰率を前記油圧アクチュエータに与えるように調節される、請求項1〜請求項6のいずれか一項に記載の電気静油圧アクチュエータ。
- 前記電気モーターは、前記可動部材が移動して前記バイパス流路を開放するときに前記可動部材の位置を制限するように配置されたピンを備える、請求項7に記載の電気静油圧アクチュエータ。
- 前記可動部材の移動を検出して前記バイパス流路が開いているかどうかを判定するように配置されたセンサを備える、請求項1〜請求項8のいずれか一項に記載の電気静油圧アクチュエータ。
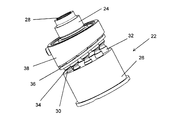
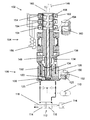
- 前記油圧ポンプは、モーターシャフトによって回転駆動されるポンプバレルと、往復運動するピストンを受けるように前記ポンプバレル内に配置された複数の軸流シリンダと、を備える回転ピストンポンプであり、前記入口は、前記ポンプバレルの一方の半部に設けられた前記軸流シリンダと流体連通しており、前記出口は、前記ポンプバレルの他方の半部に設けられた前記軸流シリンダと流体連通している、請求項1〜請求項9のいずれか一項に記載の電気静油圧アクチュエータ。
- 前記バイパス流路は、前記減衰動作モード時に前記ポンプバレルの一方の半部に設けられた軸流シリンダに接続された前記入口と、前記ポンプバレルの他方の半部に設けられた前記軸流シリンダに接続された前記出口と、の間に直接的な流路を提供する1つまたは複数の接続ポートを前記ポンプバレル内に含み、前記可動部材は、前記能動動作モード時に前記接続ポートを通る流体の流れを閉塞する位置となるように前記モーターシャフト内に配置されている、請求項10に記載の電気静油圧アクチュエータ。
- 油圧アクチュエータの制御・減衰方法であって、
能動動作モード時に、前記油圧アクチュエータに作動流体を供給するために電気モーターを励磁して油圧ポンプを駆動すること、及び
減衰動作モード時において前記油圧ポンプが前記電気モーターによって駆動されていないときに前記油圧ポンプを通るバイパス流路を開放するように、前記電気モーター内に配置された可動部材の移動を制御すること、
を含む方法。 - 前記可動部材の移動を制御することは、前記可動部材を磁化するように配置された1つまたは複数の追加コイルを励磁することを含む、請求項12に記載の方法。
- 前記油圧ポンプの使用中、所望の減衰率を前記油圧アクチュエータに与えるように前記バイパス流路の大きさを調節することを含む、請求項12または請求項13に記載の方法。
- 前記バイパス流路の大きさを調節することは、前記可動部材が移動して前記バイパス流路を開放するときに前記可動部材の位置を制限するように配置されているピンを調節することを含む、請求項14に記載の方法。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15306038.9A EP3112698B1 (en) | 2015-06-30 | 2015-06-30 | Electro hydrostatic actuators |
| EP15306038.9 | 2015-06-30 | ||
| EP15306480.3 | 2015-09-23 | ||
| EP15306480.3A EP3112699B1 (en) | 2015-06-30 | 2015-09-23 | Electro hydrostatic actuators |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017015255A true JP2017015255A (ja) | 2017-01-19 |
| JP6721424B2 JP6721424B2 (ja) | 2020-07-15 |
Family
ID=53539623
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016117540A Active JP6659476B2 (ja) | 2015-06-30 | 2016-06-14 | 電気静油圧アクチュエータおよび油圧アクチュエータを制御し減衰させる方法 |
| JP2016119441A Active JP6721424B2 (ja) | 2015-06-30 | 2016-06-16 | 電気静油圧アクチュエータおよび油圧アクチュエータの制御・減衰方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016117540A Active JP6659476B2 (ja) | 2015-06-30 | 2016-06-14 | 電気静油圧アクチュエータおよび油圧アクチュエータを制御し減衰させる方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US10611464B2 (ja) |
| EP (2) | EP3112698B1 (ja) |
| JP (2) | JP6659476B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022510533A (ja) * | 2018-08-02 | 2022-01-27 | ジーイーエー メカニカル イクイプメント イタリア エス.ピー.エー. | 高圧ホモジナイザ |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3112698B1 (en) | 2015-06-30 | 2019-09-04 | Goodrich Actuation Systems SAS | Electro hydrostatic actuators |
| CN107339282B (zh) * | 2017-06-12 | 2019-06-04 | 南京航空航天大学 | 一种无阀电液作动器 |
| EP3431758B1 (en) * | 2017-07-17 | 2020-02-26 | Goodrich Actuation Systems SAS | Electro hydrostatic actuator |
| CN108019386B (zh) * | 2017-12-08 | 2019-05-24 | 四川理工学院 | 一种大型抓钢机高效液压动臂节能系统 |
| US10787247B2 (en) | 2018-01-16 | 2020-09-29 | Goodrich Corporation | Hybrid actuator |
| US11060539B2 (en) * | 2019-02-05 | 2021-07-13 | Regents Of The University Of Minnesota | Device having hybrid hydraulic-electric architecture |
| CN109899267A (zh) * | 2019-03-08 | 2019-06-18 | 北京工业大学 | 一种eha驱动柱塞泵及其控制方法 |
| US11624447B2 (en) * | 2019-05-13 | 2023-04-11 | Boston Dynamics, Inc. | Rotary valve assembly |
| DE102019121433B4 (de) * | 2019-08-08 | 2022-12-29 | SMC Deutschland GmbH | Fluidrückführvorrichtung für einen doppeltwirkenden Zylinder und Verfahren zum Betreiben eines solchen Zylinders |
| KR102216916B1 (ko) * | 2019-08-27 | 2021-02-18 | 주식회사 케이브이엔텍 | 선박용 전기-정유압 구동장치 |
| DE102019131980A1 (de) * | 2019-11-26 | 2021-05-27 | Moog Gmbh | Elektrohydrostatisches System mit Drucksensor |
| CN111219523A (zh) * | 2020-01-07 | 2020-06-02 | 杭州孚罗泰自控阀门制造有限公司 | 一种微型电液联动执行器 |
| IT202000025039A1 (it) * | 2020-10-22 | 2022-04-22 | I N A I L Istituto Naz Per L’Assicurazione Contro Gli Infortuni Sul Lavoro | Protesi per arti del corpo umano ed attuatore elettro-idrostatico per tale protesi |
| CN114893456B (zh) * | 2022-04-02 | 2023-02-17 | 北京航空航天大学 | 一种单向节流负载敏感电静液作动器 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4934143A (en) | 1987-04-29 | 1990-06-19 | Vickers, Incorporated | Electrohydraulic fluid control system for variable displacement pump |
| US4859155A (en) * | 1987-10-21 | 1989-08-22 | Great Plains Industries, Inc. | Bypass valve for a displacement pump |
| US5144801A (en) * | 1989-04-28 | 1992-09-08 | Parker Hannifin Corporation | Electro-hydraulic actuator system |
| FR2666787B1 (fr) * | 1990-09-19 | 1992-12-18 | Aerospatiale | Actionneur hydraulique a mode hydrostatique de fonctionnement de preference en secours, et systeme de commande de vol le comportant. |
| US5338161A (en) * | 1991-06-19 | 1994-08-16 | Dana Corporation | Gear pump having internal bypass valve |
| US5097857A (en) * | 1991-08-02 | 1992-03-24 | John Mayhew | Electro-hydraulic valve-actuator system |
| US5515829A (en) * | 1994-05-20 | 1996-05-14 | Caterpillar Inc. | Variable-displacement actuating fluid pump for a HEUI fuel system |
| US5700136A (en) * | 1996-07-23 | 1997-12-23 | Sturman Industries | Digital pump with bypass inlet valve |
| WO1998011357A1 (en) * | 1996-09-12 | 1998-03-19 | Etrema Products, Inc. | Compact actuator and controller and pumping apparatus for same |
| US6575264B2 (en) * | 1999-01-29 | 2003-06-10 | Dana Corporation | Precision electro-hydraulic actuator positioning system |
| US6358018B1 (en) * | 1999-02-12 | 2002-03-19 | Parker Hannifin Ab | Hydraulic rotating axial piston engine |
| US6305919B1 (en) | 1999-08-24 | 2001-10-23 | Visteon Global Technologies, Inc. | Hydraulic pump housing with an integral dampener chamber |
| FR2811037B1 (fr) * | 2000-06-28 | 2002-10-18 | Aerospatiale Matra Airbus | Systeme d'actionnement hydraulique a commande electrique |
| US7640736B2 (en) * | 2005-07-22 | 2010-01-05 | Ashradan Holdings Ltd. | Self-contained hydraulic actuator system |
| US7191593B1 (en) * | 2005-11-28 | 2007-03-20 | Northrop Grumman Corporation | Electro-hydraulic actuator system |
| US20070157612A1 (en) * | 2006-01-10 | 2007-07-12 | Xinhua He | Compact hydraulic actuator system |
| EP1878598A1 (en) | 2006-07-13 | 2008-01-16 | Fondazione Torino Wireless | Regenerative suspension for a vehicle |
| US7434395B2 (en) * | 2006-07-25 | 2008-10-14 | Delphi Technologies, Inc. | Apparatus and method for dual mode compact hydraulic system |
| JP5214575B2 (ja) * | 2009-10-20 | 2013-06-19 | カヤバ工業株式会社 | 電動液圧アクチュエータ |
| JP5606044B2 (ja) | 2009-11-10 | 2014-10-15 | 住友精密工業株式会社 | スナビング性に優れる電気油圧式アクチュエータ、およびそれに用いる駆動装置、並びにそれに用いる制御方法 |
| US8434301B2 (en) | 2010-04-16 | 2013-05-07 | Nabtesco Corporation | Local backup hydraulic actuator for aircraft control systems |
| US8935015B2 (en) | 2011-05-09 | 2015-01-13 | Parker-Hannifin Corporation | Flight control system with alternate control path |
| JP5890987B2 (ja) | 2011-09-15 | 2016-03-22 | 住友精密工業株式会社 | 電動油圧アクチュエータ |
| US8973864B2 (en) * | 2012-08-02 | 2015-03-10 | Bell Helicopter Textron Inc. | Independent blade control system with hydraulic cyclic control |
| US9897112B2 (en) | 2012-11-07 | 2018-02-20 | Parker-Hannifin Corporation | Smooth control of hydraulic actuator |
| US10029534B2 (en) | 2013-03-15 | 2018-07-24 | ClearMotion, Inc. | Hydraulic actuator with on-demand energy flow |
| EP2989333B1 (en) | 2013-04-22 | 2021-02-17 | Parker Hannifin Corporation | Method of increasing electro-hydrostatic actuator piston velocity |
| CN103722996A (zh) | 2014-01-10 | 2014-04-16 | 湖南大学 | 基于电储能元件的液压减振器能量回收系统及控制方法 |
| CN104196080B (zh) | 2014-09-17 | 2016-02-03 | 太原理工大学 | 变转速容积直驱纯电液压挖掘机驱动及能量回收系统 |
| EP3112698B1 (en) * | 2015-06-30 | 2019-09-04 | Goodrich Actuation Systems SAS | Electro hydrostatic actuators |
| EP3257746B1 (en) | 2016-06-13 | 2020-05-13 | Goodrich Actuation Systems SAS | Electro hydrostatic actuators |
-
2015
- 2015-06-30 EP EP15306038.9A patent/EP3112698B1/en active Active
- 2015-09-23 EP EP15306480.3A patent/EP3112699B1/en active Active
-
2016
- 2016-06-14 JP JP2016117540A patent/JP6659476B2/ja active Active
- 2016-06-16 JP JP2016119441A patent/JP6721424B2/ja active Active
- 2016-06-30 US US15/198,001 patent/US10611464B2/en active Active
- 2016-06-30 US US15/197,975 patent/US10087962B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022510533A (ja) * | 2018-08-02 | 2022-01-27 | ジーイーエー メカニカル イクイプメント イタリア エス.ピー.エー. | 高圧ホモジナイザ |
| JP7329546B2 (ja) | 2018-08-02 | 2023-08-18 | ジーイーエー メカニカル イクイプメント イタリア エス.ピー.エー. | 高圧ホモジナイザ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6721424B2 (ja) | 2020-07-15 |
| US20170002844A1 (en) | 2017-01-05 |
| US10087962B2 (en) | 2018-10-02 |
| US20170002845A1 (en) | 2017-01-05 |
| JP6659476B2 (ja) | 2020-03-04 |
| US10611464B2 (en) | 2020-04-07 |
| EP3112698B1 (en) | 2019-09-04 |
| EP3112698A1 (en) | 2017-01-04 |
| EP3112699B1 (en) | 2020-12-30 |
| JP2017015253A (ja) | 2017-01-19 |
| EP3112699A1 (en) | 2017-01-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6721424B2 (ja) | 電気静油圧アクチュエータおよび油圧アクチュエータの制御・減衰方法 | |
| US9482365B2 (en) | Rotary valve | |
| US8678033B2 (en) | Proportional valve employing simultaneous and hybrid actuation | |
| JP5890987B2 (ja) | 電動油圧アクチュエータ | |
| US10450061B2 (en) | Servo actuators | |
| EP3129660B1 (en) | Servo valve | |
| EP2878816B1 (en) | Pump control device | |
| US10539131B2 (en) | Electro hydrostatic actuator | |
| JP5645236B2 (ja) | 電油ハイブリッド駆動装置 | |
| JP6248144B2 (ja) | ポンプ装置 | |
| US9915368B2 (en) | Electrohydraulic valve having dual-action right-angle pilot actuator | |
| JP2013185668A (ja) | アクチュエータ | |
| CN103821787A (zh) | 采用压扭二维弹簧的液压先导独立负载多路阀 | |
| US20210123458A1 (en) | Failsafe Electro-hydraulic Servo Valve | |
| JPH0642149Y2 (ja) | 電磁駆動制御弁 | |
| JP2020143686A (ja) | アクチュエータシステム | |
| JP2018151032A (ja) | 流体圧シリンダ及び流体圧駆動ユニット | |
| JPH07310687A (ja) | ベーン型流体機械 | |
| JPH0571560A (ja) | 油圧式動力伝達継手 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191029 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200519 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200618 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6721424 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |