JP2017011957A - 同心二軸モータ - Google Patents
同心二軸モータ Download PDFInfo
- Publication number
- JP2017011957A JP2017011957A JP2015127988A JP2015127988A JP2017011957A JP 2017011957 A JP2017011957 A JP 2017011957A JP 2015127988 A JP2015127988 A JP 2015127988A JP 2015127988 A JP2015127988 A JP 2015127988A JP 2017011957 A JP2017011957 A JP 2017011957A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- rotor type
- stator
- concentric
- concentric biaxial
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Landscapes
- Permanent Magnet Type Synchronous Machine (AREA)
Abstract
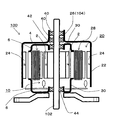
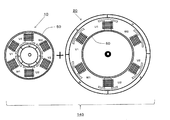
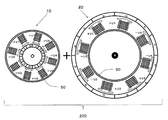
【解決手段】同心二軸モータ100は、内側にインナーロータ形の第1モータ10を有し、外側にアウターロータ形の第2モータ20を有する。第1モータ10の第1回転子2及び第2モータ20の第2回転子24は永久磁石で構成されている。第1モータ10の第1固定子4と第2モータ20の第2固定子28は実質的に同一円周上に配置されている。
【選択図】図1
Description
相対的に内周側に位置する第1モータと、
相対的に外周側に位置する第2モータとを有し、
前記第1モータがインナーロータ形モータで構成され、
前記第2モータがアウターロータ形モータで構成され、
内周側に位置する前記インナーロータ形モータと、外周側に位置する前記アウターロータ形モータとの境界領域に、前記インナーロータ形モータの第1固定子と、前記アウターロータ形モータの第2固定子が位置決めされていることを特徴とする同心二軸モータを提供することにより達成される。
102 第1出力軸
104 第2出力軸
10 第1モータ(インナーロータ形モータ)
2 第1回転子(第1の永久磁石群PM(1) 8つ)
4 第1固定子
20 第2モータ(アウターロータ形モータ)
24 第2回転子(第2の永久磁石群PM(2) 8つ)
28 第2固定子
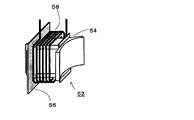
50 ヨーク本体
52 分割コアユニット
54 コア本体
56 ステータカバー
58 コイル
S スロット
B 第1モータと第2モータの境界領域
Claims (7)
- 相対的に内周側に位置する第1モータと、
相対的に外周側に位置する第2モータとを有し、
前記第1モータがインナーロータ形モータで構成され、
前記第2モータがアウターロータ形モータで構成され、
内周側に位置する前記インナーロータ形モータと、外周側に位置する前記アウターロータ形モータとの境界領域に、前記インナーロータ形モータの第1固定子と、前記アウターロータ形モータの第2固定子が位置決めされていることを特徴とする同心二軸モータ。 - 前記第1モータの第1固定子と、前記第2モータの第2固定子とが実質的に同一の円周上に配置されている、請求項1に記載の同心二軸モータ。
- 前記第1モータの第1回転子が永久磁石で構成され、
前記第2モータの第2回転子が永久磁石で構成されている、請求項1又は2に記載の同心二軸モータ。 - 前記第1モータと前記第2モータとが2相駆動モータで構成されている、請求項1〜3のいずれか一項に記載の同心二軸モータ。
- 前記第1モータと前記第2モータとが3相駆動モータで構成されている、請求項1〜3のいずれか一項に記載の同心二軸モータ。
- 前記第1モータ及び/又は前記第2モータの各相を構成する前記固定子の一部を欠落した構成を有する、請求項4又は5に記載の同心二軸モータ。
- 前記第1モータがインナー駆動磁気コアを有し、
前記第2モータがアウター駆動磁気コアを有し、
前記インナー駆動磁気コアと前記アウター駆動磁気コアが共通のヨークに連結されている、請求項1〜6のいずれか一項に記載の同心二軸モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015127988A JP2017011957A (ja) | 2015-06-25 | 2015-06-25 | 同心二軸モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015127988A JP2017011957A (ja) | 2015-06-25 | 2015-06-25 | 同心二軸モータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017011957A true JP2017011957A (ja) | 2017-01-12 |
Family
ID=57764243
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015127988A Pending JP2017011957A (ja) | 2015-06-25 | 2015-06-25 | 同心二軸モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017011957A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7330570B1 (ja) | 2022-11-22 | 2023-08-22 | 良雄 藤岡 | ブラシレスモータ |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10304645A (ja) * | 1997-04-21 | 1998-11-13 | Toyota Motor Corp | モータおよびホイールモータ |
| JP2013230076A (ja) * | 2012-02-08 | 2013-11-07 | Nsk Ltd | アクチュエータ、ステータ、モータ、回転直動変換機構及びリニアアクチュエータ |
-
2015
- 2015-06-25 JP JP2015127988A patent/JP2017011957A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10304645A (ja) * | 1997-04-21 | 1998-11-13 | Toyota Motor Corp | モータおよびホイールモータ |
| JP2013230076A (ja) * | 2012-02-08 | 2013-11-07 | Nsk Ltd | アクチュエータ、ステータ、モータ、回転直動変換機構及びリニアアクチュエータ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7330570B1 (ja) | 2022-11-22 | 2023-08-22 | 良雄 藤岡 | ブラシレスモータ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9712028B2 (en) | Stator having three-line connection structure, BLDC motor using same, and driving method therefor | |
| US10862355B2 (en) | Armature with a core having teeth of different circumferential widths and electric motor including the armature and a rotor | |
| WO2014188737A1 (ja) | 永久磁石型同期電動機 | |
| JP2005176424A (ja) | 回転電機の回転子 | |
| KR20080055935A (ko) | 트윈 회전자를 가지는 모터 및 이를 탑재한 기기 | |
| JP5605164B2 (ja) | 永久磁石型同期電動機及び永久磁石型同期電動機の運転方法 | |
| JP2013074743A (ja) | 回転電機 | |
| JP2009159738A (ja) | 永久磁石同期モータ | |
| JP7159800B2 (ja) | 回転電機 | |
| JP2014039461A (ja) | Afpmモータ | |
| JP2008289209A (ja) | ブラシレスdcモータ | |
| JP2014176284A (ja) | ダブルステータ型スイッチトリラクタンス回転機 | |
| JP2017011957A (ja) | 同心二軸モータ | |
| JP5960068B2 (ja) | 回転電機システム | |
| JP2013207857A (ja) | ブラシレスモータ | |
| JP2016171641A (ja) | 多極三相式回転電機 | |
| JP2017028972A (ja) | 交流励磁同期回転電機 | |
| JP5734135B2 (ja) | 電気機械およびその製造方法 | |
| JP6481545B2 (ja) | モータ | |
| JP2010115095A (ja) | ステータコアおよび回転電機 | |
| JP2019017208A (ja) | 回転子及び永久磁石式回転電機 | |
| JP2018148675A (ja) | 回転電機のステータ | |
| JP2013021774A (ja) | モータ | |
| JP6638615B2 (ja) | 同期回転電機 | |
| JP2017085745A (ja) | リラクタンス式同期回転電機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180620 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20180620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180620 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190320 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191001 |