以下、適宜図面を参照して本発明の実施形態について説明する。なお、以下に説明される実施形態は本発明が具体化された一例にすぎず、本発明の要旨を変更しない範囲で実施形態を適宜変更できることは言うまでもない。
以下の説明において、インクカートリッジ30がカートリッジ装着部110に挿入される方向が挿入方向51と定義される。インクカートリッジ30がカートリッジ装着部110から脱抜される方向が脱抜方向52と定義される。すなわち、挿入方向51と脱抜方向52とは、逆方向である。本実施形態において、挿入方向51及び脱抜方向52は水平方向であるが、挿入方向51及び脱抜方向52は水平方向でなくてもよい。挿入方向51は第1方向の一例であり、脱抜方向52は第2方向の一例である。
また、インクカートリッジ30がカートリッジ装着部110に挿入された状態、つまりインクカートリッジ30が使用姿勢(装着姿勢の一例)にある状態において、重力方向が下方向53と定義され、重力方向と反対方向が上方向54と定義される。また、インクカートリッジ30を脱抜方向52に見た場合において、挿入方向51及び下方向53と直交する方向が右方向55及び左方向56と定義される。右方向55及び左方向56は、第3方向及び第4方向の一例である。なお、以下の説明において、特に言及がない限り、インクカートリッジ30は、使用姿勢にあるものとする。
[プリンタ10の概要]
プリンタ10(液体消費装置の一例)は、インクジェット記録方式に基づいて、記録用紙に対してインク滴を選択的に吐出することにより画像を記録するものである。プリンタ10は、図1に示されるように、記録ヘッド21(液体消費部の一例)と、インク供給装置100と、記録ヘッド21及びインク供給装置100を接続するインクチューブ20とを備えている。インク供給装置100には、カートリッジ装着部110(装着部の一例)が設けられている。カートリッジ装着部110には、インクカートリッジ30(液体カートリッジの一例)が装着され得る。カートリッジ装着部110には、その一面に開口112が設けられている。インクカートリッジ30は、開口112を通じてカートリッジ装着部110に挿入方向51に挿入され、或いはカートリッジ装着部110から脱抜方向52に抜き出される。
インクカートリッジ30には、プリンタ10で使用可能なインク(液体の一例)が貯留されている。カートリッジ装着部110へのインクカートリッジ30の装着が完了した状態において、インクカートリッジ30と記録ヘッド21とは、インクチューブ20で接続されている。記録ヘッド21にはサブタンク28が設けられている。サブタンク28は、インクチューブ20を通じて供給されるインクを一時的に貯留する。記録ヘッド21は、インクジェット記録方式によって、サブタンク28から供給されたインクをノズル29から選択的に吐出する。具体的には、記録ヘッド21に設けられたヘッド制御基板21Aから各ノズル29に対応して設けられたピエゾ素子29A(アクチュエータの一例)に選択的に駆動電圧が印加される。これにより、ノズル29から選択的にインクが吐出される。
プリンタ10は、以下のような記録用紙搬送機構を備えている。すなわち、給紙トレイ15から給紙ローラ23によって搬送路24へ給送された記録用紙は、搬送ローラ対25によってプラテン26上へ搬送される。記録ヘッド21は、プラテン26上を通過する記録用紙に対してインクを選択的に吐出する。これにより、記録用紙に画像が記録される。プラテン26を通過した記録用紙は、排出ローラ対27によって、搬送路24の最下流に設けられた排紙トレイ16に排出される。
[インク供給装置100]
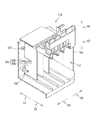
インク供給装置100は、図1に示されるように、プリンタ10に設けられている。インク供給装置100は、プリンタ10が備える記録ヘッド21にインクを供給するものである。インク供給装置100は、インクカートリッジ30を装着可能なカートリッジ装着部110を備えている。カートリッジ装着部110は、ケース101と、インクニードル102と、センサ103(検出部の一例)と、装着センサ107(装着検出部の一例)とを備えている。
なお、図1においては、カートリッジ装着部110へのインクカートリッジ30の装着が完了した状態が示されている。カートリッジ装着部110には、図2に示されるように、シアン、マゼンタ、イエロー、ブラックの各色に対応する4つのインクカートリッジ30が収容可能である。また、インクニードル102、センサ103、及び装着センサ107は、4つのインクカートリッジ30それぞれに対応して、4つずつ設けられている。
[インクニードル102]
ケース101には、開口112が形成されている。また、ケース101は、開口112とは反対側に位置する奥面151を備えている。インクニードル102は、図1及び図2に示されるように、ケース101の奥面151から脱抜方向52に突出している。インクニードル102は、ケース101の奥面151において、インクカートリッジ30のインク供給部60(液体供給部の一例)に対面し得る位置に配置されている。インクニードル102は、内部に液体流路が形成された管状の樹脂針であって、その突出端側に開口が設けられており、基端側にインクチューブ20が接続されている。インクカートリッジ30のインク室36内のインクは、インク供給部60に進入したインクニードル102を通じてインクチューブ20に流出される。
プリンタ10は、カートリッジ装着部110の開口112を被覆或いは露出させる不図示のカバーを備えている。当該カバーは、ケース101或いはプリンタ10の筐体(不図示)によって開閉可能に支持されている、カバーが開いている場合の開口112は、プリンタ10の外部に対して露出されている。この状態において、ユーザは、開口112を通じてカートリッジ装着部110にインクカートリッジ30を挿入することが可能、或いはカートリッジ装着部110からインクカートリッジ30を抜き出すことが可能となる。一方、カバーが閉じている場合の開口112は、プリンタ10の外部に対して覆われている。この状態においては、インクカートリッジ30をカートリッジ装着部110に対して挿抜することができない。
なお、本明細書中において、「カートリッジ装着部110に装着されたインクカートリッジ30」とは、少なくとも一部がカートリッジ装着部110内(より具体的には、ケース101内)に位置しているインクカートリッジ30を意味する。したがって、カートリッジ装着部110に挿入される過程のインクカートリッジ30も、カートリッジ装着部110に装着されたインクカートリッジ30である。
一方、本明細書中において、「カートリッジ装着部110へのインクカートリッジ30の装着が完了」した状態とは、少なくともインクカートリッジ30から記録ヘッド21にインクを供給可能な状態である。例えば、当該状態は、カートリッジ装着部110に対してインクカートリッジ30が移動しないようにロックされている状態や、開口112に対して開閉するカバーが閉じられている状態のカートリッジ装着部110内にインクカートリッジ30が位置している状態等、プリンタ10による画像記録が可能となるインクカートリッジ30の状態を意味する。カートリッジ装着部110に装着完了されたインクカートリッジ30は、使用姿勢である。
[センサ103]
ケース101は、奥面151の上端から開口112へ延びる天面152を備えている。センサ103は、図1及び図2に示されるように、ケース101の天面152から下方へ突出している。センサ103は、右方向55及び左方向56に対向して配置された発光部104及び受光部105を備える。カートリッジ装着部110への装着が完了したインクカートリッジ30の凸部37(図3参照)は、発光部104及び受光部105の間に配置される。換言すれば、発光部104及び受光部105は、カートリッジ装着部110への装着が完了したインクカートリッジ30の凸部37を挟んで対向配置されている。
インクカートリッジ30の内部空間(より詳細には、後述する凸部37の内部空間)のうち、カートリッジ装着部110へのインクカートリッジ30の装着が完了したときに発光部104及び受光部105を結ぶ仮想線と重なる位置を、検出位置と定義する。すなわち、検出位置とは、発光部104から受光部105に至る光路と重なる位置となる。換言すれば、センサ103は、検出位置に対面して設けられていることとなる。なお、本実施形態において、発光部104から出力される光の光路は、右方向55及び左方向56に一致する。
なお、本実施形態におけるセンサ103は、カートリッジ装着部110への装着が完了したインクカートリッジ30に対面する位置に配置されている。しかしながら、センサ103の位置はこれに限定されない。例えば、センサ103は、カートリッジ装着部110に装着される過程のインクカートリッジ30に対面する位置に配置されていてもよい。すなわち、センサ103は、カートリッジ装着部110に装着されたインクカートリッジ30に対面する位置に配置されていればよい。
センサ103は、発光部104から出力された光が受光部105で受光されたか否かに応じて異なる信号を出力する。例えば、センサ103は、発光部104から出力された光が受光部105で受光されない(すなわち、受光強度が所定の強度未満である)ことを条件として、ローレベル信号(「信号レベルが閾値レベル未満の信号」を指す。)を制御部130(図8参照)に出力する。一方、センサ103は、発光部104から出力された光が受光部105で受光された(すなわち、受光強度が所定の強度以上である)ことを条件として、ハイレベル信号(「信号レベルが閾値レベル以上の信号」を指す。)を制御部130に出力する。なお、本実施形態における発光部104は、例えば、インクカートリッジ30(より詳細には、凸部37)の壁を透過し、且つシャッター75(図6参照)を透過しない光(例えば、可視光や赤外光)を出力する。
[装着センサ107]
装着センサ107は、図1及び図2に示されるように、インクニードル102より鉛直方向の上方において、ケース101の奥面151に設けられている。装着センサ107は、カートリッジ装着部110内におけるインクカートリッジ30の挿入経路上の装着検出位置に配置されている。装着センサ107は、例えば機械式のセンサであって、装着検出位置におけるインクカートリッジ30の有無に応じた信号を制御部130に出力する。本実施形態においては、カートリッジ装着部110へのインクカートリッジ30の装着が完了したときのインクカートリッジ30が装着検出位置に位置するように、装着センサ107が配置されている。
具体的には、装着センサ107は、インクカートリッジ30の前壁(より詳細には、後述するカートリッジカバー33の前壁35)に押圧されていないことを条件として、ローレベル信号を制御部130に出力する。一方、装着センサ107は、カートリッジ装着部110に装着完了されたインクカートリッジ30の前壁に押圧されたことを条件として、ハイレベル信号を制御部130に出力する。なお、本実施形態における装着センサ107は、インクカートリッジ30の前壁に押圧されるか否かによって異なる信号を出力する機械式のセンサであるが、装着センサ107の具体例はこれに限定されず、光学式センサ等であってもよい。
[インクカートリッジ30]
インクカートリッジ30は、図3に示されるように、インク容器32(液体容器の一例)と、カートリッジカバー33とで構成される。インク容器32は、その大部分がカートリッジカバー33に覆われており、一部(凸部37及びインク供給部60の一部)がカートリッジカバー33から露出されている。インクカートリッジ30は、図3に示された使用姿勢、つまり、同図の下側の面を底面とし、同図の上側の面を上面として、カートリッジ装着部110に対して挿入方向51及び脱抜方向52に沿って挿抜される。
インク容器32は、図4及び図5に示されるように、概ね扁平な直方体の外形を呈する。インク容器32の右方向55及び左方向56の寸法は、下方向53及び上方向54の寸法、及び挿入方向51及び脱抜方向52の寸法より小さい。インク容器32は、インク室36と、凸部37と、インク供給部60とを主に備える。インク容器32は、主に樹脂によって構成されている。特に、凸部37は、発光部104からの光を透過可能な材料で構成される。
インク容器32は、挿入方向51又は脱抜方向52から平面視したときに少なくとも部分的に重なり合う前壁40及び後壁41と、下方向53又は上方向54から平面視したときに少なくとも部分的に重なり合う上壁39及び下壁42と、前壁40を正面としてインク容器32を平面視したときに左方向56に配置された左壁43とで構成されている。一方、インク容器32の右方向55の面は、開放されている。開放されたインク容器32の右面は、フィルム(不図示)によって封止される。インク容器32の右面を封止するフィルムの外形は、右方向55から平面視した場合のインク容器32の外形と概ね一致する。このフィルムは、上壁39、前壁40、後壁41、及び下壁42の右端面に熱溶着されて、インク室36の右壁を構成する。
[インク室36]
インク室36は、インクが貯留される空間である。インク室36は、上壁39、前壁40、後壁41、下壁42、左壁43、及びフィルムによって区画されている。カートリッジ装着部110に装着される前のインクカートリッジ30のインク室36は、負圧に維持されている。インク室36は、インクカートリッジ30がカートリッジ装着部110に装着されることによって、後述する第1大気連通路64及び第2大気連通路65を通じて大気に連通される。また、インク室36の内部には、第1内壁44と、第2内壁45とが形成されている。
第1内壁44は、図4及び図5に示されるように、インク室36の下部で且つ左壁43とフィルムとの間において、挿入方向51、脱抜方向52、下方向53、及び上方向54に延設されている。より詳細には、第1内壁44は、インク供給部60より左方向56にずれて配置されている。また、第1内壁44は、前壁40、後壁41、及び下壁42の内面に接続されており、上壁39から離間されている。さらに、第1内壁44には、下壁42に接する位置に貫通孔44Aが形成されている。すなわち、第1内壁44は、インク室36の一部を右方向55及び左方向56に区画する。換言すれば、第1内壁44によって右方向55及び左方向56に区画されたインク室36の一部は、第1内壁44の上方及び貫通孔44Aによって相互に連通されている。
第1内壁44には、回動軸46と、一対のガイドレール47とが形成されている。回動軸46は、インク供給部60の開口63より脱抜方向52及び上方向54にずれた位置で、且つ第2内壁45より挿入方向51にずれた位置において、第1内壁44から右方向55に突出している。回動軸46は、センサアーム70(図6参照)を回動自在に支持する。一対のガイドレール47は、回動軸46より下方向53で且つ開口63より上方向54にずれた位置に設けられている。一対のガイドレール47は、下方向53及び上方向54に離間して配置されており、各々が挿入方向51及び脱抜方向52に延設されている。一対のガイドレール47は、挿入方向51及び脱抜方向52に移動するアームロッカー90(図7参照)の第3部分93を案内する。
第2内壁45は、開口63、回動軸46、及びガイドレール47の後端より脱抜方向52にずれた位置で、且つ後壁41から挿入方向51に離間した位置に配置されている。また、第2内壁45は、第1内壁44から右方向55に突出し、且つ概ね下方向53及び上方向54に湾曲しつつ延設されている。さらに、第2内壁45及びフィルムの間には、隙間が形成されている。挿入方向51を向く第2内壁45の前面には、バネ座45Aが形成されている。バネ座45Aは、開口62、63(図9参照)を結ぶ直線上に設けられており、後述するコイルバネ97の後端を支持する。脱抜方向52を向く第2内壁45の後面は、概ね回動軸46を中心とする円弧形状に形成されている。第2内壁45の後面は、回動軸46を回動中心として回動するフロート76を案内する。
[凸部37]
凸部37は、図3〜図5に示されるように、上壁39から上方向54に突出されている。凸部37は、内部空間を有する箱形状である。凸部37の内部空間は、インク室36に連通されている。インクカートリッジ30の装着姿勢において、インク室36内のインクの液面は、凸部37より下方向53に位置している。インク容器32がカートリッジカバー33に収容されたとき、凸部37は、カートリッジカバー33の上壁34に形成された開口34Aを通じて、カートリッジカバー33から突出される。すなわち、凸部37の少なくとも一部は、インクカートリッジ30の外部に露出されている。凸部37は、発光部104から出力された光を透過する。
[インク供給部60]
インク供給部60は、図3〜図5に示されるように、概ね円筒形状の外形を呈する。インク供給部60は、インク容器32の前壁40の下端近傍で、且つインクカートリッジ30の中央より右方向55にずれて設けられている。インク供給部60は、インク室36の内部から外部に亘って延設されている。インク供給部60は、インク容器32がカートリッジカバー33に収容されたときに、カートリッジカバー33の前壁35に形成された開口35Aを通じて、カートリッジカバー33から突出される。すなわち、インク供給部60の少なくとも一部は、インクカートリッジ30の外部に露出されている。さらに、インクカートリッジ30から露出されたインク供給部60には、第1シール部材66及びキャップ69が取り付けられている。
インク供給部60は、インク室36に貯留されたインクをインクカートリッジ30の外部に流出させる。図9に示されるように、インク供給部60の内部には、バルブ室61(液体供給室の一例)が形成されている。バルブ室61は、インク供給部60の挿入方向51の端部(以下、「先端」と表記する。)に形成された開口62(第1開口の一例)によって、インクカートリッジ30の外部に連通されている。また、バルブ室61は、インク供給部60の脱抜方向52の端部(以下、「基端」と表記する。)に形成された開口63(第2開口の一例)によって、インク室36に連通されている。
バルブ室61には、図4及び図5に示されるように、第1大気連通路64及び第2大気連通路65が接続されている。第1大気連通路64は、バルブ室61とインクカートリッジ30の外部との間で気体を流通させる流路である。すなわち、第1大気連通路64は、バルブ室61を大気に連通させる。第1大気連通路64は、インク供給部60の内面と外面と連通させる孔64Aと、一端が孔64Aと連通された溝64Bと、溝64Bの他端とインクカートリッジ30の外部とを連通させる孔64Cとで構成されている。
第2大気連通路65は、バルブ室61とインク室36との間で気体を流通させる流路である。第2大気連通路65は、インク供給部60の内面と外面とを連通させる孔65Aと、一端が孔65Aと連通された溝65Bと、溝65Bの他端とインク室36とを連通させる孔65Cとで構成されている。孔65Aは、孔64Aより脱抜方向52にずれた位置に配置されている。孔65Cは、未使用状態のインクカートリッジ30のインク室36に貯留されたインクの液面より上方に位置している。換言すると、孔65Cは、インクがインク室36に最大量貯留された状態におけるインクの液面より上方に位置している。なお、第1大気連通路64及び第2大気連通路65は、インクカートリッジ30の右壁を構成するフィルムによって液密に封止されている。
[第1シール部材66、キャップ69]
第1シール部材66は、図7に示されるように、外径寸法がインク供給部60の外径寸法と概ね一致する円板形状である。第1シール部材66は、開口62が形成されたインク供給部60の先端に液密的に密着される。また、第1シール部材66には、中央部を厚み方向に貫通する貫通孔67が形成されている。すなわち、バルブ室61の開口62は、その一部が第1シール部材66によって閉塞され、他の一部が貫通孔67によって開放されている。さらに、第1シール部材66は、貫通孔67を囲む位置において脱抜方向52に突出された筒部68を有する。筒部68は、概ね円筒形状の外形を呈する。筒部68の内径寸法は、後述するバルブ80の閉塞部81の外径寸法より僅かに小さい。第1シール部材66は、例えば、ゴム等の弾性材料によって形成されている。
キャップ69は、図4に示されるように、カートリッジカバー33から露出されたインク供給部60の外面を覆うように、カートリッジカバー33に取り付けられる。第1シール部材66は、挿入方向51及び脱抜方向52において、インク供給部60の先端とキャップ69とに挟まれている。キャップ69には、貫通孔69Aが設けられている。貫通孔67、69Aは、バルブ室61をインクカートリッジ30の外部に連通させる。なお、インクニードル102の外径寸法は、貫通孔67の直径より僅かに大きく、且つ貫通孔69Aの直径より僅かに小さい。
[センサアーム70]
インク室36の内部には、図9〜図11に示されるように、センサアーム70(被検知部材の一例)が収容されている。センサアーム70は、回動軸46によって回動可能に支持されている。センサアーム70は、非検知位置(図9及び図11参照)と、検知位置(図10参照)との間を、回動軸46を回動中心として回動する。以下、センサアーム70の回動方向を、図9〜図11の方向(すなわち、インクカートリッジ30を右方向55)から見て、「時計回り」或いは「反時計回り」と表記する。センサアーム70は、図6に示されるように、軸受部71と、第1アーム72と、第2アーム73と、第3アーム74と、シャッター75(被検知部の一例)と、フロート76とを備える。
軸受部71は、内部に回動軸46を受け入れる円環形状である。軸受部71に回動軸46が挿入されることによって、センサアーム70は、回動軸46の周りに回動可能になる。第1アーム72は、軸受部71の外面から概ね上方向54に延設されている。第2アーム73は、軸受部71の外面から概ね挿入方向51及び下方向53に延設されている。第3アーム74は、軸受部71の外面から概ね脱抜方向52及び下方向53に延設されている。第2アーム73は、第1アーム72及び第3アーム74より短い。
シャッター75は、第1アーム72の先端に取り付けられている。但し、シャッター75は、第1アーム72の先端以外の場所に取り付けられていてもよい。シャッター75は、凸部37の内部空間に進入している。シャッター75は、センサアーム70が非検知位置に位置するときに、発光部104から受光部105に至る光路から外れた位置に配置される。一方、シャッター75は、センサアーム70が検知位置に位置するときに、非検知位置よりも上方で且つ当該光路と重なる位置(すなわち、検出位置)に配置される。また、シャッター75は、挿入方向51、脱抜方向52、下方向53、及び上方向54に広がる概ね平板形状である。シャッター75の面積は、発光部104から出力される光の直径より大きい。
検出位置のシャッター75は、発光部104から出力された光を受光部105に到達させない。シャッター75は、例えば、発光部104から出力された光を、吸収、反射、或いは屈折させることによって、当該光が受光部105に到達するのを阻止する。シャッター75は、例えば、顔料を含有する樹脂であってもよいし、アルミニウム膜のような反射膜で表面が覆われていてもよいし、屈折率が空気と異なる透明若しくは半透明の材料で形成されていてもよい。すなわち、発光部104から出力された光は、センサアーム70が非検知位置のときに受光部105で受光され、センサアーム70が検知位置のときにシャッター75で遮られる。
フロート76は、第3アーム74の先端に取り付けられている。但し、フロート76は、第3アーム74の先端以外の場所に取り付けられていてもよい。また、フロート76は、インク室36内において、後壁41と第2内壁45とで囲まれた空間に配置される。すなわち、第3アーム74は、第2内壁45とフィルムとの間の隙間を通って、軸受部71とフロート76とを接続する。フロート76は、インク室36に貯留されたインクより比重が小さい材料によって形成されている。
図9〜図11に示されるように、センサアーム70が反時計回りに回動されると、シャッター75は概ね挿入方向51に移動され、フロート76は概ね上方向54に移動され、第2アーム73は概ね下方向53に移動される。一方、センサアーム70が時計回りに回動されると、シャッター75は概ね脱抜方向52に移動され、フロート76は概ね下方向53に移動され、第2アーム73は概ね上方向54に移動される。
[バルブ80、第2シール部材85、アームロッカー90、コイルバネ97]
インクカートリッジ30の内部には、図9〜図11に示されるように、バルブ80と、第2シール部材85(シール部の一例)と、アームロッカー90(本体の一例)と、コイルバネ97(付勢部材の一例)とが収容されている。より詳細には、バルブ80及び第2シール部材85はバルブ室61に収容され、アームロッカー90は開口63を通じてインク室36及びバルブ室61に延設され、コイルバネ97はインク室36に収容されている。バルブ80及びアームロッカー90は、移動部材の一例を構成する。
バルブ80、第2シール部材85、及びアームロッカー90(以下、「移動部材等」と表記することがある。)は、一体となって挿入方向51及び脱抜方向52に移動可能に構成されている。図9に示される移動部材等の位置は、第1位置の一例である。図10及び図11に示される移動部材等の位置は、第2位置の一例である。第2位置は、第1位置より脱抜方向52に離間した位置である。移動部材等は、貫通孔69A、67を通じてバルブ室61に進入したインクニードル102に押圧されて、第1位置から第2位置へ移動される。また、移動部材等は、インクニードル102がバルブ室61から退出したことに応じて、コイルバネ97の付勢力によって第2位置から第1位置へ移動される。さらに移動部材等の内部には、接続流路98が形成されている。
バルブ80は、図7に示されるように、閉塞部81と、挿入部82とで構成されている。閉塞部81は、バルブ80が第1位置のときに、筒部68の内部に進入して貫通孔67を閉塞させる。閉塞部81に進入された筒部68は、拡径して閉塞部81の外周面に液密に密着される。一方、閉塞部81は、バルブ80が第2位置のときに、筒部68から離間して、貫通孔67を開放する。
挿入部82は、第2シール部材85に挿入される。挿入部82は、密着部83と、溝部84とで構成されている。密着部83及び溝部84は、各々が挿入方向51及び脱抜方向52に延設されており、且つ挿入部82の周方向に隣接して配置される。密着部83の外径寸法は、溝部84の外径寸法より大きい。これにより、挿入部82が第2シール部材85に挿入されたときに、密着部83の外面と第2シール部材85の内面とが密着され、溝部84の外面と第2シール部材85の内面との間に空間が形成される。
第2シール部材85は、ゴム等の弾性材料によって形成されている。第2シール部材85は、外形が概ね円筒形状の筒部86と、筒部86の外周面に形成されたシール部87、88、89とで構成される。筒部86の外径寸法は、バルブ室61の内径寸法より小さい。筒部86の内径寸法は、密着部83の直径及び後述する先端部95と同等か僅かに小さく、溝部84の直径より大きい。筒部86の内部空間には、挿入方向51を向く端部に形成された開口からバルブ80の挿入部82が挿入され、脱抜方向52を向く端部に形成された開口から先端部95が挿入される。そして、密着部83の外面及び先端部95の外面は、筒部86の内面に液密に密着される。一方、筒部86の内面と溝部84との間の空間は、第1流路98Aの一部を構成する。第1流路98Aは、接続流路98の一部である。
シール部87〜89は、筒部86の外面から径方向外向きに突出し、且つ周方向に連続して延設されている。また、シール部87〜89は、挿入方向51及び脱抜方向52に離間して設けられている。バルブ室61内に挿入される前のシール部87〜89の直径は、インク供給部60の内径寸法(すなわち、バルブ室61の直径)より大きい。すなわち、シール部87〜89は、縮径された状態でバルブ室61内に配置され、インク供給部60の内面に周方向に連続して密着される。すなわち、各シール部87〜89は、インク供給部60の内面と第2シール部材85の外面との間に形成される空間のうち、当該シール部87〜89より開口62寄りの空間と、当該シール部87〜89より開口63寄りの空間とを遮断する。
アームロッカー90は、図7に示されるように、第1部分91と、第2部分92と、第3部分93とで構成されている。第1部分91〜第3部分93は、各々が長尺棒状である。第1部分91は、挿入方向51及び脱抜方向52に延設されている。第2部分92は、第1部分91の後端から下方向53及び上方向54に延設されている。第3部分93は、第2部分92の上端から挿入方向51及び脱抜方向52に延設されている。アームロッカー90の内部空間には、図9〜図11に示されるように、接続流路98の他の一部が形成されている。
第1部分91は、第2部分92に接続された基端部94と、基端部94から挿入方向51に突出する先端部95とで構成される。第1部分91の内部には、挿入方向51及び脱抜方向52に延びる第1流路98Aの一部が形成されている。第1部分91内の第1流路98Aの一端は、先端部95に設けられた開口を通じてアームロッカー90の外部に連通されている。先端部95に設けられた開口は、挿入方向55に向けて開口する部分と、下方向53に向けて開口する部分とを有している。第1部分91内の第1流路98Aの他端は、第2部分92の内部に形成された第2流路98Bに接続されている。
基端部94の少なくとも一部は、図9〜図11に示されるように、インク室36内に配置されている。また、基端部94の上面(液体ガイドの一例)は、アームロッカー90の中央から右方向55及び左方向56に向かって下り傾斜となっている。先端部95は、第2シール部材85の筒部86の内部に進入して、筒部86の内部に密着される。先端部95が筒部86の内部に進入することによって、溝部84と第2シール部材85との間の空間と第1流路98Aとが連通される。その結果、第1流路98Aは、先端部95に設けられた開口を通じて、第1部分91の内部から筒部86の内面と溝部84との間に亘って形成される。
第2部分92の内部には、図9〜図11に示されるように、下方向53及び上方向54(すなわち、鉛直方向)に沿って延びる第2流路98Bが形成されている。第2流路98Bは、第1流路98Aの脱抜方向52の端部と接続され、且つ下端がインク室36に開口されている。脱抜方向52を向く第2部分92の後面には、バネ座96が設けられている。バネ座96は、開口62、63を結ぶ直線上に設けられており、コイルバネ97の前端を支持する。コイルバネ97は、図9〜図11に示されるように、バネ座45A、96の間に配置される。そして、コイルバネ97は、アームロッカー90と、アームロッカー90に接続されたバルブ80及び第2シール部材85とを挿入方向51に付勢する。
第3部分93は、図9に示されるように、アームロッカー90が第1位置のときに、非検知位置のセンサアーム70の第2アーム73と当接して、センサアーム70を非検知位置に拘束する。より詳細には、第3部分93は、アームロッカー90が第1位置のときに、非検知位置のセンサアーム70の第2アーム73の下方に配置されており、第2アーム73が下方向53に移動(すなわち、センサーアーム70が反時計回りに回動)するのを規制する。一方、第3部分93は、アームロッカー90が第2位置のときに、第2アーム73から脱抜方向52に離間して、センサアーム70の拘束を解除する。すなわち、第3部分93は、アームロッカー90が第1位置のときに、検知位置のセンサアーム70の第2アーム73が存在すべき位置に配置される。一方、第3部分93は、アームロッカー90が第2位置のときに、検知位置のセンサアーム70の第2アーム73が存在すべき位置から外れた位置に配置される。
また、第3部分93の左方向56の端部は、一対のガイドレール47の間に配置される。すなわち、アームロッカー90は、一対のガイドレール47の間に配置された第3部分93によって、下方向53及び上方向54の移動が規制されると共に、挿入方向51及び脱抜方向52への移動が案内される。
[接続流路98]
接続流路98は、バルブ室61の第2シール部材85より開口62(換言すれば、貫通孔67、69A)寄りの空間と、インク室36とを、液体が流通可能に接続する。すなわち、インク室36に貯留されたインクは、接続流路98を通じてのみインクカートリッジ30の外部に流出される。接続流路98は、前述したように、第1流路98Aと、第2流路98Bとで構成されている。
第1流路98Aは、溝部84の外面及び筒部86の内面との間の空間と、アームロッカー90の第1部分91の内部空間とに亘って形成されており、概ね挿入方向51及び脱抜方向に延設されている。すなわち、第1流路98Aは、概ねバルブ室61内に形成されている。第2流路98Bは、アームロッカー90の第2部分92の内部空間に形成されており、概ね下方向53及び上方向に54に延設されている。また、インクカートリッジ30の装着姿勢において、第2流路98Bは、開口63より下方向53にずれた位置でインク室36に開口されている。本実施形態において、インク室36側における第2流路98Bの開口は、下方向53及び上方向54において、インク室36の下壁42と対向し且つ離間している。インク室36側における第2流路98Bの開口の位置は、バルブ室61の下端よりも下方向53に配置されている。
[制御部130]
プリンタ10は、制御部130を備える。制御部130は、図8に示されるように、CPU131、ROM132、RAM133、EEPROM134、及びASIC135を備えており、これらは内部バス137によって接続されている。ROM132には、CPU131が各種動作を制御するためのプログラムなどが格納されている。RAM133は、CPU131が上記プログラムを実行する際に用いるデータや信号等を一時的に記録する記憶領域、或いはデータ処理の作業領域として使用される。EEPROM134には、電源オフ後も保持すべき設定やフラグ等が格納される。なお、CPU131、ROM132、RAM133、EEPROM134、及びASIC135は、その一部又は全部が1つのICチップで構成されていてもよいし、複数のICチップに分かれて構成されていてもよい。
制御部130は、不図示のモータを駆動させることによって、給紙ローラ23、搬送ローラ対25、及び排出ローラ対27を回転させる。制御部130は、記録ヘッド21を制御することによって、ノズル29にインクを吐出させる。具体的には、制御部130は、ピエゾ素子29Aに印加する駆動電圧の大きさを示す制御信号をヘッド制御基板21Aに出力する。ヘッド制御基板21Aは、制御部130から取得した制御信号に示される大きさの駆動電圧を、各ノズル29に設けられたピエゾ素子29Aに印加することによって、当該ノズル29にインクを吐出させる。制御部130は、プリンタ10やインクカートリッジ30に関する情報や各種メッセージを表示部109に表示させる。
制御部130は、センサ103から出力された検知信号と、装着センサ107から出力された検知信号と、温度センサ106から出力された信号と、カバーセンサ108から出力された信号とを取得する。温度センサ106は、温度に応じた信号を出力するものである。温度センサ106による温度の測定位置は特に限定されず、例えば、カートリッジ装着部110の内部であってもよいし、プリンタ10の表面であってもよい。カバーセンサ108は、カートリッジ装着部110の開口112に対して開閉するカバーが開いているときと、閉まっているときとで異なる信号を出力するものである。
[センサアーム70、バルブ80、第2シール部材85、アームロッカー90の動き]
まず、インクカートリッジ30がカートリッジ装着部110に装着される過程におけるセンサアーム70、バルブ80、第2シール部材85、及びアームロッカー90の動きが説明される。なお、以下の説明において、インク室36に貯留されたインクの量は、後述するニアエンプティ状態よりも多い量であるとする。すなわち、フロート76は、インク室36に貯留されたインク中に沈んだ状態であって、センサアーム70を反時計回りに回動させようとする浮力を受けている。
カートリッジ装着部110に装着される前のインクカートリッジ30において、バルブ80、第2シール部材85、及びアームロッカー90は、図9に示されるように、コイルバネ97の付勢力によって第1位置に配置されている。第1位置のバルブ80は、第1シール部材66の筒部68に進入して、貫通孔67を閉塞させる。これにより、開口62(換言すれば、貫通孔67、69A)と接続流路98との間が遮断されている。また、第1位置の第2シール部材85のシール部88は、孔64A、65Aの間に配置されている。これにより、第1大気連通路64と第2大気連通路65との間が遮断されている。
さらに、第1位置のアームロッカー90の第3部分93は、非検知位置のセンサアーム70の第2アーム73に当接して、センサアーム70を非検知位置に拘束している。センサアーム70が非検知位置で拘束されているとき、シャッター75は、検出位置から外れた位置に配置されている。すなわち、図9の状態におけるセンサ103は、ハイレベル信号を制御部130に出力している。さらに、図9に示されるインクカートリッジ30はカートリッジ装着部110に装着される前であるため、装着センサ107は、ローレベル信号を制御部130に出力している。
この状態において、カートリッジ装着部110の開口112を開閉するカバーが開かれると、カートリッジ装着部110にインクカートリッジ30が挿入可能になる。インクカートリッジ30がカートリッジ装着部110の奥面151近傍まで挿入されると、装着センサ107は、インクカートリッジ30のカートリッジカバー33の前壁35に押圧されて、ハイレベル信号を制御部130に出力する。すなわち、装着センサ107から出力される検知信号は、インクカートリッジ30がカートリッジ装着部110に装着されたことに応じて、ローレベル信号からハイレベル信号に切り替わる。
また、インクカートリッジ30がカートリッジ装着部110の奥面151近傍まで挿入されると、貫通孔69A、67を通じてバルブ室61に進入したインクニードル102がバルブ80の閉塞部81に当接する。この状態で更にインクカートリッジ30が挿入方向51に移動すると、バルブ80はインクニードル102から反力を受けて脱抜方向52に押される。これにより、バルブ80、第2シール部材85、及びアームロッカー90は、コイルバネ97の付勢力に抗って、第1位置から第2へ向けて脱抜方向52に移動される。バルブ80、第2シール部材85、及びアームロッカー90がインクニードル102から受ける反力は、インクカートリッジ30の外部から付与された外力の一例である。
第2位置のバルブ80は、図10に示されるように、第1シール部材66の筒部68から離間して、貫通孔67を開放する。これにより、開口62(換言すれば、貫通孔67、69A)と接続流路98とが連通される。また、孔64A、65Aは、第2シール部材85が第2位置のときに、シール部87、88の間に位置する。これにより、連通された第1大気連通路64及び第2大気連通路65を通じて、インク室36が大気に開放される。さらに、第2位置のアームロッカー90の第3部分93は、センサアーム70の第2アーム73から離間される。これにより、非検知位置におけるセンサアーム70の拘束が解除される。その結果、センサアーム70は、フロート76が受ける浮力によって反時計回りに回動される。
センサアーム70が反時計回りに回動されることによって、シャッター75が検出位置に到達する。これにより、発光部104から出力される光が遮断されて、受光部105に到達しなくなる。その結果、センサ103は、ローレベル信号を制御部130に出力する。換言すれば、センサ103から出力される検知信号は、シャッター75が検出位置に到達したことに応じて、ハイレベル信号からローレベル信号に切り替わる。上記の過程を経て、カートリッジ装着部110へのインクカートリッジ30の装着が完了する。
なお 、センサアーム70のシャッター75は、例えば、以下のように定義してもよい。右方向55及び左方向56において互いに対向する地点A及び地点Bがあるとする。地点Aから発光されて右方向55或いは左方向56に進行する光、例えば、可視光や赤外光、が地点Bに到達するときの光の強度をIとする。また、地点Aにはセンサ103の発光部が配置され、地点Bにはセンサ103の受光部が配置されてもよい。センサ103の受光部が例えばフォトトランジスタで構成されている場合、フォトトランジスタに到達する光の強度がIのときのフォトトランジスタのコレクタ電流の値をCとする。
そして、インク室36内のインク量が所定量以上であることによって、シャッター75は、右方向55及び左方向56において地点A及び地点Bの間に位置する。地点Aから発光されて右方向55或いは左方向56に進行する光は、センサアーム70の右側面及び左側面の一方に入射される。そして、センサアーム70の右側面及び左側面の他方から出射されて地点Bに到達するときの光の強度は、強度Iの半分未満、例えばゼロとなる。また、このときのフォトトランジスタのコレクタ電流の値は、値Cの半分未満、例えばゼロとなる。一方、インク室36内のインク量が所定量未満であることによって、センサアーム70は、右方向55及び左方向56において地点A及び地点Bの間の位置から外れる。このとき、地点Aから発光されて地点Bに到達する光の強度は、強度Iの半分以上となる。また、このときのフォトトランジスタのコレクタ電流の値は、値Cの半分以上となる。
次に、インクカートリッジ30がカートリッジ装着部110から脱抜される過程におけるセンサアーム70、バルブ80、第2シール部材85、及びアームロッカー90の動きが説明される。なお、以下の説明において、インク室36へのインクの貯留量は、後述するニアエンプティ状態よりも多い量であるとする。すなわち、カートリッジ装着部110からインクカートリッジ30が脱抜される時点において、センサアーム70は、検知位置に配置されているものとする。
カートリッジ装着部110からのインクカートリッジ30の脱抜が開始(すなわち、インクカートリッジ30が脱抜方向52に移動)されると、インクニードル102は、貫通孔67、69Aを通じてバルブ室61から徐々に退出する。これにより、バルブ80、第2シール部材85、及びアームロッカー90は、コイルバネ97の付勢力によって、第2位置から第1位置へ移動される。そして、インクニードル102がバルブ室61から完全に退出したとき、バルブ80、第2シール部材85、及びアームロッカー90は、図9に示される第1位置に配置されている。
前述したように、第1位置のバルブ80は貫通孔67を閉塞し、第1位置の第2シール部材85のシール部88は第1大気連通路64及び第2大気連通路65の連通を遮断する。また、第2位置から第1位置へ移動されるアームロッカー90の第3部分93は、検知位置のセンサアーム70の第2アーム73に当接して、当該第2アーム73を上方に押し上げる。その結果、アームロッカー90に当接されたセンサアーム70は、検知位置から非検知位置へ時計回りに回動され、非検知位置において再び拘束される。
これにより、シャッター75が検出位置から外れるので、発光部104から出力された光が受光部105に到達する。すなわち、センサ103は、ハイレベル信号を制御部130に出力する。換言すれば、センサ103から出力される検知信号は、シャッター75が検出位置から外れたことに応じて、ローレベル信号からハイレベル信号に切り替わる。また、装着センサ107は、インクカートリッジ30による押圧が解除されたことに応じて、ローレベル信号を制御部130に出力する。換言すれば、装着センサ107から出力される検知信号は、インクカートリッジ30がカートリッジ装着部110から脱抜されたことに応じて、ハイレベル信号からローレベル信号に切り替わる。
次に、カートリッジ装着部110に装着完了されたインクカートリッジ30内のインクが記録ヘッド21によって消費されたときのセンサアーム70の動きが説明される。なお、バルブ80、第2シール部材85、及びアームロッカー90は、インク室36内のインクの減少に伴って移動されない。
記録ヘッド21のノズル29からインクが吐出されることによって、インク室36に貯留されたインクの液面が降下する。そして、フロート76の大部分が当該インクの液面から露出されると、フロート76に作用する浮力が失われる。これにより、センサアーム70は、時計回りに回動される。その結果、シャッター75が検出位置から外れるので、発光部104から出力された光が受光部105に到達する。すなわち、センサ103は、ハイレベル信号を制御部130に出力する。換言すれば、センサ103から出力される検知信号は、インク室36に貯留されたインクの量が閾値を下回ったことに応じて、ローレベル信号からハイレベル信号に切り替わる。
[制御部130によるインクの粘度の異常判定]
以下、図12〜図14を参照して、制御部130によって実行されるインク室36内に貯留されたインクの粘度の異常の有無の判定処理が説明される。
制御部130は、装着センサ107から出力される検知信号がローレベル信号からハイレベル信号に切り替わったことを条件として(S11:Yes)、センサアーム70の移動時間の計測を開始する(S12)。なお、制御部130は、所定周期で検知信号を参照している。そして、制御部130は、最新の検知信号と、当該最新の検知信号の直前の検知信号との信号レベルが異なる場合に、検知信号が切り替わったと判断する。
一方、装着センサ107から出力される検知信号がローレベル信号からハイレベル信号に切り替わらない場合(S11:No)、制御部130は、後述するステップS20の処理を実行する。なお、装着センサ107から出力される検知信号がローレベル信号からハイレベル信号に切り替わらない場合(S11:No)とは、例えば、新しいインクカートリッジ30がカートリッジ装着部110に装着されていない場合である。
次に、制御部130は、移動時間の計測を開始してからの経過時間が予め定められた最大時間を上回ったか否かを判断する(S13)。既に最大時間が経過している場合(S13:Yes)、制御部130は、後述するステップS15の処理を実行する。センサ103から出力される検知信号がハイレベル信号からローレベル信号に切り替わる(S13:Yes)前に最大時間が経過する場合とは、インク室36に貯留されたインクの粘度が極めて高い場合である。
一方、未だ最大時間が経過していない場合(S13:No)、制御部130は、センサ103から出力される検知信号がハイレベル信号からローレベル信号に切り替わったか否かを判断する(S14)。センサ103から出力される検知信号が切り替わってないと判断した場合(S14:No)、制御部130は、ステップS13の処理を再び実行する。一方、センサ103から出力される検知信号が切り替わったと判断した場合(S14:Yes)、制御部130は、移動時間の計測を終了して、センサアーム70の移動時間を決定する(S15)。一方、最大時間が経過していると判断された場合(S13:Yes)、制御部130は、最大時間をセンサアーム70の移動時間とする。
移動時間は、装着センサ107から出力される検知信号がローレベル信号からハイレベルに切り替わってから(S11:Yes)、センサ103から出力される検知信号がハイレベル信号からローレベル信号に切り替わるまでに要した時間である。詳細には、装着センサ107から出力される検知信号がローレベル信号からハイレベルに切り替わるタイミングと、センサアーム70がアームロッカー90による拘束の解除によって非検知位置から検知位置へ向けて回動可能となるタイミングとは、厳密には同時ではないこともある。しかしながら、前者のタイミングと後者のタイミングとは時間的に近いので、後者のタイミングを前者のタイミングとして擬制できる。そこで、制御部130は、装着センサ107からハイレベル信号を取得してから、センサ103からローレベル信号を取得するまでの時間を、移動時間、すなわち、センサアーム70が非検知位置から検知位置へ移動するのに要した時間として計測する。
次に、制御部130は、異常フラグをリセット(すなわち、”OFF”を設定)する(S16)。異常フラグは、後述する移動時間の判断(S18)の結果、移動時間が閾値範囲内でなかった場合(S18:No)に”ON”が設定される。異常フラグは、インクカートリッジ30毎に設定される値である。制御部130は、異常フラグをEEPROM134に記憶させる。
次に、制御部130は、温度センサ106から出力される信号に基づいて、閾値範囲を決定する(S17)。閾値範囲は、インク室36に貯留されているインクの粘度を推定するために、ステップS15で計測された移動時間と比較されるものである。制御部130は、温度センサ106から出力される信号によって特定される温度が高いほど、閾値範囲の上限値及び下限値の少なくとも一方を小さくする。換言すれば、制御部130は、温度センサ106から出力される信号によって特定される温度が低いほど、閾値範囲の上限値及び下限値の少なくとも一方を大きくする。
次に、制御部130は、ステップS15で測定された移動時間が、ステップS17で決定された閾値範囲に含まれるか否かを判断する(S18)。移動時間が閾値範囲の下限値を下回った場合、インクの粘度が正常なインクの粘度よりも低すぎると推定される。一方、移動時間が閾値範囲の上限値を上回った場合、インクの粘度が正常なインクの粘度よりも高すぎると推定される。そして、制御部130は、移動時間が閾値範囲を外れたことを条件として(S18:No)、異常フラグに”ON”を設定する(S19)。一方、制御部130は、移動時間が閾値範囲に含まれることを条件として(S18:Yes)、ステップS19の処理をスキップする。
次に、制御部130は、カートリッジ装着部110の開口112に対して開閉するカバーが閉まっていることを示す信号がカバーセンサ108から出力されているか否かを判断する(S20)。カバーが開いていると判断した場合(S20:No)、制御部130は、ステップS11以降の処理を再び実行する。一方、カバーが閉まっていると判断した場合(S20:Yes)、制御部130は、ステップS20でカバーが閉まっていると判断してから所定の時間が経過したか否かを判断する(S21)。
既に所定の時間が経過したと判断した場合(S21:Yes)、制御部130は、図12の処理を終了する。一方、未だ所定の時間が経過していないと判断した場合(S21:No)、制御部130は、ステップS11以降の処理を再び実行する。なお、ステップS11以降の処理を繰り返す過程でカバーが開いていると判断した場合(S20:No)、制御部130は、カバーが閉まっていると判断(S20:Yes)した時点で開始した時間の計測を終了する。
制御部130は、図12に示される処理を終了した後、カートリッジ装着部110の開口112に対して開閉するカバーが閉まっていることを示す信号がカバーセンサ108から出力されていることを条件として、図13に示される処理を所定の時間間隔で繰り返し実行する。
まず、制御部130は、装着センサ107から出力される検知信号がハイレベル信号であるか否かを判断する(S31)。装着センサ107から出力される検知信号がローレベル信号である場合(S31:No)、制御部130は、インクカートリッジ30が未装着であることを報知(S38)し、図13の処理を終了する。報知の具体的な方法は特に限定されないが、例えば、プリンタ10に搭載された表示部109にメッセージを表示してもよいし、スピーカ(不図示)からガイド音声を出力してもよい。後述するステップS37、S44、S47についても同様である。
一方、装着センサ107から出力される検知信号がハイレベル信号である場合(S31:Yes)、制御部130は、異常フラグに”ON”が設定されているか否かを判断する(S32)。異常フラグに”ON”が設定されている場合(S32:Yes)、制御部130は、インクカートリッジ30に関する情報を報知(S37)し、図13の処理を終了する。報知の具体的な内容は特に限定されないが、例えば、インク室36内のインクが劣化していること、或いはインクカートリッジ30の交換を推奨すること等を報知すればよい。
一方、異常フラグに”OFF”が設定されている場合(S32:No)、制御部130は、図14に示される処理である残量判定処理を実行する(S33)。残量判定処理については後述する。残量判定処理の後、制御部130は、エンプティフラグに”ON”が設定されているか否かを判断する(S34)。エンプティフラグは、インク室36に貯留されているインクの量が画像記録を実行するのに不十分である程に少なくなっていると判断された場合に”ON”に設定されるフラグである。
エンプティフラグに”ON”が設定されている場合(S34:Yes)、制御部130は、図13の処理を終了する。一方、エンプティフラグに”ON”が設定されていない場合(S34:No)、制御部130は、画像記録指示を取得したか否かを判断する(S35)。画像記録指示を取得していない場合(S35:No)、制御部130は、図13の処理を終了する。一方、画像記録指示を取得した場合(S35:Yes)、制御部130は、記録ヘッド21、給紙ローラ23、搬送ローラ対25、排出ローラ対27等を直接的及び間接的に制御することによって記録用紙に画像を記録(S36)し、図13の処理を終了する。なお、ステップS36の処理は、記録用紙1枚に対する画像記録処理が終了する時点までを一つの処理として終了してもよいし、取得した全ての画像データに対応する画像記録処理が終了した時点までを一つの処理として終了してもよい。
上記のように、制御部130は、異常フラグに”ON”が設定されている場合(S32:Yes)、ステップS36の画像記録処理を実施しない。つまり、制御部130は、ステップS36をスキップする。すなわち、制御部130は、記録ヘッド21にインクを吐出させない。
以下、図14に示される処理である残量判定処理が説明される。最初に、制御部130は、ニアエンプティフラグに”ON”が設定されているか否かを判断する(S41)。ニアエンプティフラグは、インク室36に貯留されているインクの量が画像記録を実行できる量ではあるものの残り少なくなっていると判断された場合に”ON”に設定されるフラグである。つまり、ニアエンプティフラグに”ON”が設定されている場合におけるインク室36に貯留されているインクの量は、エンプティフラグに”ON”が設定されている場合におけるインク室36に貯留されているインクの量よりも多い。
ニアエンプティフラグに”ON”が設定されていない場合(S41:No)、制御部130は、センサ103から出力される検知信号がローレベル信号からハイレベル信号に切り替わったか否かを判断する(S42)。センサ103から出力される検知信号が切り替わってないと判断した場合(S42:No)、制御部130は、残量判定処理を終了して、図13のステップS34の処理を実行する。一方、センサ103から出力される検知信号が切り替わったと判断した場合(S42:Yes)、制御部130は、ニアエンプティフラグに”ON”を設定する(S43)。次に、制御部130は、インクカートリッジ30がニアエンプティ状態であることを報知(S44)し、図14の処理を終了する。その後、制御部130は、図13のステップS34の処理を実行する。前述したニアエンプティ状態とは、インク室36に貯留されているインクの量が画像記録を実行できる量ではあるものの残り少なくなっている状態である。
ステップS41において、ニアエンプティフラグに”ON”が設定されている場合(S41:Yes)、制御部130は、ニアエンプティフラグに”ON”を設定してからのソフトカウント値が所定値以上であるか否かを判断する(S45)。ソフトカウント値とは、制御部130が記録ヘッド21にインクの吐出命令を出したときのデータに基づいて算出される値である。詳細には、ソフトカウント値とは、制御部130が記録ヘッド21から吐出するよう命令したインク滴の数と、制御部130によって指定された各インク滴のインク量との乗算値が累積的にカウントされる値である。ソフトカウント値は、例えば、カートリッジ装着部110に新しいインクカートリッジ30が装着されたタイミングでリセットされる。所定値は、ソフトカウント値と比較される値である。
ニアエンプティフラグに”ON”が設定されてからのソフトカウント値が所定値未満である場合(S45:No)、つまりニアエンプティフラグに”ON”が設定されてからの記録ヘッド21によるインク消費量が所定値未満である場合(S45:No)、制御部130は、前述したステップS44の処理を実行する。
一方、ニアエンプティフラグに”ON”が設定されてからのソフトカウント値が所定値以上である場合(S45:Yes)、つまりニアエンプティフラグに”ON”が設定されてからの記録ヘッド21によるインク消費量が所定値以上である場合(S45:Yes)、制御部130は、エンプティフラグに”ON”を設定する。次に、制御部130は、インクカートリッジ30がエンプティ状態であることを報知(S47)し、図14の処理を終了する。その後、制御部130は、図13のステップS34の処理を実行する。前述したエンプティ状態とは、インク室36に貯留されているインクの量が画像記録を実行するのに不十分である程に少なくなっている状態である。
[本実施形態の作用効果]
上記の実施形態によれば、インク室36に貯留されたインクは、接続流路98から開口63を通じてバルブ室61に流入し、開口62を通じてインクカートリッジ30の外部に流出する。ここで、インクカートリッジ30の装着姿勢において、接続流路98が開口63より下方でインク室36に開口されているので、インク室36の液面が開口63の位置を下回っても、直ちにインク室36内の空気がバルブ室61に流入しない。すなわち、インク室36の空気がバルブ室61に流入するときのインク室36の液面の高さを低くすることができる。換言すれば、インクカートリッジ30に残留するインクの量を削減することができる。
より詳細には、ソフトカウント値が所定値に達した時点において、インク室36に貯留されたインクの液面がアームロッカー90の第2部分92の下端(すなわち、接続流路98をインク室36に連通させる開口の位置)より上方向54に位置するように、ステップS45でソフトカウント値と比較される所定値が予め決定される。これにより、ステップS47でエンプティ状態が報知された時点において、インク室36内の空気は接続流路98に未だ進入していない。すなわち、インク室36内の空気が接続流路98に進入する前に、当該インクカートリッジ30の交換を促すことができる。その結果、インクカートリッジ30からノズル29に至る流路に混入した空気によって、画像記録品質が低下するのを抑制できる。
また、上記の実施形態のように、移動部材の一部であるバルブ80によって、バルブ室61の開口62を閉塞或いは開放してもよい。ここで、バルブ80等を第1位置へ向けて付勢するコイルバネ97をインク室36に配置したことにより、バルブ室61の容積を削減することができる。また、上記の実施形態のように、移動部材の一部であるアームロッカー90によって、センサアーム70を拘束或いは拘束解除してもよい。但し、コイルバネ97は省略可能である。この場合、バルブ80及びアームロッカー90は、バルブ室61に進入したインクニードル102によって、第1位置から第2位置へ向けて一方向に移動可能になる。
また、上記の実施形態のように、バルブ80及び第2シール部材の間の空間と、アームロッカー90の内部空間とで接続流路98を構成することにより、アームロッカー90の内部に形成される接続流路98を短くすることができる。また、アームロッカー90に嵌合される第2シール部材85の後端にシール部89を設けることにより、バルブ室61内を開口63に近い位置で閉塞させることができるので、アームロッカー90の外面とインク供給部60の内面との間に進入するインクの量を削減することができる。
さらに、上記の実施形態によれば、アームロッカー90の第1部分91の上面を下り傾斜とすることによって、当該上面のインクが下方に導かれやすくなる。これにより、インクカートリッジ30に残留するインクの量をさらに削減することができる。液体ガイドの具体的な構成はこれに限定されず、例えば、アームロッカー90の上面に右方向55及び左方向56に延びる溝を設けてもよい。
[変形例]
なお、上記の実施形態では、挿入方向51及び脱抜方向52に沿って延びる第1流路98Aの一部と、下方向53及び上方向54に沿って延びる第2流路98Bとをアームロッカー90内に形成した例を説明したが、接続流路98を構成する具体的な方法はこれに限定されない。図15を参照して、変形例に係るアームロッカー120の例を説明する。なお、上記の実施形態と共通する構成要素には同一の参照番号を付して詳しい説明を省略し、相違点を中心に説明する。
変形例に係るアームロッカー120は、図15(A)に示されるように、上記の実施形態に係る第1部分91及び第3部分93と、チューブ121とを備える。また、変形例に係る第1部分91の後端には、第1流路98Aを囲むように脱抜方向52に突出する接続部91Aが形成されている。チューブ121は、可撓性を有する管状に構成されている。そして、チューブ121の内部空間は、変形例に係る第2流路98Bを構成する。
より詳細には、チューブ121の一端(第1開口の一例)は、接続部91Aに接続されている。また、チューブ121の他端(第2開口の一例)は、第2流路98Bとインク室36とを連通させる。そして、チューブ121は、図15(B)に示されるように、バネ座96の一部に設けられた切欠き96Aを通じて、概ね下方向53及び上方向54に沿って延びている。さらに、チューブ121の他端は、開口63より下方向53で、且つチューブ121の一端(換言すれば、接続部91A)より挿入方向51にずれた位置に配置されている。
変形例によれば、上記の実施形態に係るアームロッカー90のように、内部に屈曲された接続流路98を形成する必要がないので、接続流路98を簡単な構成することができる。「下方向53及び上方向54に沿って延びる」とは、鉛直方向に直線的に延びることに限定されない。例えば図15(A)に示されるチューブ121のように、撓みながら鉛直方向に延びていてもよいし、鉛直方向に対してある程度傾斜していてもよい。
[その他の変形例]
上記の実施形態では、センサアーム70は回動することによって非検知位置及び検知位置の間を移動したが、センサアーム70は回動以外によって非検知位置及び検知位置の間を移動してもよい。例えば、センサアーム70は、下方向53及び上方向54に移動することによって非検知位置及び検知位置の間を移動してもよい。
上記の実施形態に係るセンサアーム70は、フロート76に作用する浮力によって非検知位置から検知位置へ移動した。しかし、センサアーム70は、フロート76に代えて錘を有していてもよい。そして、センサアーム70は、錘に作用する重力によって、非検知位置から検知位置に移動してもよい。
上記の実施形態では、シャッター75は、センサアーム70の位置に拘わらずインク室36内に位置していた。しかし、シャッター75は、センサアーム70が検知位置のときにセンサ103の発光部104から受光部105への光を遮光することを条件として、他の構成であってもよい。例えば、シャッター75は、センサアーム70が非検知位置のときにインク室36外に配置されており、センサアーム70が非検知位置から検知位置へ移動する過程においてインク室36内に進入してきてもよい。また、シャッター75は、センサアーム70の位置に拘わらず、インク室36外に配置されていてもよい。
また、上記の実施形態では、インクカートリッジ30がカートリッジ装着部110に装着完了された(換言すれば、装着センサ107からハイレベル信号が出力された)タイミングで、移動時間の計測を開始する例を説明した。このように、既存の装着センサ107を利用することにより、インク供給装置100の構成を大きく変更することなく、インクの粘度を推定するための処理を実現することができる。しかしながら、本発明はこれに限定されず、制御部130において認識可能な任意のタイミングであってもよい。
また、上記の実施形態では、移動時間が閾値範囲を外れたことを条件として(S18:No)、記録ヘッド21の動作が規制される、すなわち、ステップS36がスキップされる。これにより、粘度が大きく変化したインクを吐出することによる記録ヘッド21のトラブルを防止することができる。但し、ステップS36をスキップする処理は必須ではない。すなわち、制御部130はインク粘度の異常を報知する処理(S37)のみを実行し、記録ヘッド21を動作させるか否かはユーザの判断に委ねてもよい。なお、その際の制御部130の制御フローは、図12〜図14に示したものとは異なるが、その詳細な説明は割愛する。
または、制御部130は、異常フラグに”ON”が設定されていると判断した場合(S32:Yes)に、ステップS35、S36の処理をスキップせずに、ステップS36における画像記録処理において、各ノズル29のピエゾ素子に印加する駆動電圧の大きさが調整されるようにヘッド制御基板21Aを制御してもよい。
具体的には、制御部130は、移動時間が閾値範囲に含まれる場合と、移動時間が閾値範囲から外れた場合とで、ノズル29から吐出されるインク量が略同一となるように、ピエゾ素子29Aに印加すべき駆動電圧の大きさをヘッド制御基板21Aに調整させてもよい。すなわち、移動時間が閾値範囲の下限値を下回る(すなわち、インクの粘度が低すぎる)場合、制御部130は、移動時間が閾値範囲内の場合より、ピエゾ素子29Aに印加する駆動電圧を小さくすればよい。一方、移動時間が閾値範囲の上限値を上回る(すなわち、インクの粘度が高すぎる)場合、制御部130は、移動時間が閾値範囲内の場合より、ピエゾ素子29Aに印加する駆動電圧を大きくすればよい。
上記構成によれば、異なる粘度のインクが貯留された複数種類のインクカートリッジ30がカートリッジ装着部110に装着可能である場合において、インクの種類に応じた適切な駆動電圧でピエゾ素子29Aを駆動させることができる。なお、上記の実施形態においては、アクチュエータの例としてピエゾ素子29Aが用いられているが、アクチュエータの具体例はこれに限定されず、例えば、熱によりインク中に気泡を発生させてノズル29からインクを吐出させるサーマル式のアクチュエータであってもよい。
また、インクの粘度は、周辺の温度の影響を受けて変化する。具体的には、温度が高いほど粘度が低くなり、温度が低いほど粘度が高くなる傾向がある。制御部130は、温度に応じてピエゾ素子29Aに印加される駆動電圧が調整されるように、ヘッド制御基板21Aを制御してもよい。より詳細には、温度が高い場合には、制御部130は低い駆動電圧がピエゾ素子29Aに印加されるようにヘッド制御基板21Aに制御信号を出力する。温度が低い場合には、制御部130は高い駆動電圧がピエゾ素子29Aに印加されるようにヘッド制御基板21Aに制御信号を出力する。
また、ピエゾ素子29Aに印加される駆動電圧に対応したインク粘度の最適な閾値が存在する。したがって、温度に応じたインク粘度の閾値範囲を設定することが好ましい。そこで、上記の実施形態では、温度に応じた適切な閾値範囲が決定されている。閾値範囲の決定方法は特に限定されないが、ROM132等に予め記憶された複数の閾値範囲のうちから温度に対応する閾値範囲を選択してもよいし、温度を入力パラメータとする関数を用いて閾値範囲の上限値或いは下限値を算出してもよい。また、ピエゾ素子29Aに印加される駆動電圧が温度に応じて調整されない場合には、温度センサ106から出力される信号に基づいて閾値範囲を決定するスッテプS17は省略されてもよく、その場合、固定の閾値範囲を用いてもよい。
また、上記の実施形態における制御部130は、以下のようにして、センサアーム70の移動時間を計測していた。つまり、制御部130は、装着センサ107がハイレベル信号を出力したことに応じて計測を開始し、センサ103がローレベル信号を出力したことに応じて計測を終了し、計測の開始から終了までの時間をセンサアーム70の移動時間としていた。制御部130は、例えば、装着センサ107がハイレベル信号を出力した時刻をステップS12で取得し、センサ103がローレベル信号を出力した時刻とをステップS15で取得し、これらの時刻の差分をセンサアーム70の移動時間としてもよい。
また、上記の実施形態における制御部130は、異常フラグをEEPROM134に記憶していたが、インクカートリッジ30に搭載されたICチップの中のメモリに記憶してもよい。また、上記の実施形態における制御部130は、CPU131とASIC135とを備えていたが、制御部130の構成はこれに限定されない。例えば、制御部130はASIC135を有しておらず、図12、図13、及び図14に示される処理は、全てCPU131がROM132からプログラムを読み出すことによって実行されてもよい。逆に、制御部130がCPU131を有しておらず、ASIC135やFPGA等のハードウエアのみで構成されていてもよい。また、制御部130は複数のCPU131や複数のASIC135等を備えていてもよい。
さらに、上記の実施形態では、インクを液体の一例として説明したが、本発明はこれに限定されない。例えば、インクに代えて、印刷時にインクに先立って記録用紙に吐出される前処理液を液体としてもよい。