JP2017006644A - 筋肉電気刺激装置 - Google Patents
筋肉電気刺激装置 Download PDFInfo
- Publication number
- JP2017006644A JP2017006644A JP2016106643A JP2016106643A JP2017006644A JP 2017006644 A JP2017006644 A JP 2017006644A JP 2016106643 A JP2016106643 A JP 2016106643A JP 2016106643 A JP2016106643 A JP 2016106643A JP 2017006644 A JP2017006644 A JP 2017006644A
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- electrodes
- output
- unit
- electrical stimulation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 210000003205 muscle Anatomy 0.000 title abstract description 49
- 230000000638 stimulation Effects 0.000 claims abstract description 125
- 230000003387 muscular Effects 0.000 claims description 93
- 239000000463 material Substances 0.000 description 28
- 238000000034 method Methods 0.000 description 25
- 230000008569 process Effects 0.000 description 24
- 238000001514 detection method Methods 0.000 description 21
- 210000001139 rectus abdominis Anatomy 0.000 description 18
- 230000004048 modification Effects 0.000 description 16
- 238000012986 modification Methods 0.000 description 16
- 238000003860 storage Methods 0.000 description 15
- 238000012549 training Methods 0.000 description 14
- 230000002093 peripheral effect Effects 0.000 description 13
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 12
- 210000001015 abdomen Anatomy 0.000 description 12
- 230000000694 effects Effects 0.000 description 12
- 229910052710 silicon Inorganic materials 0.000 description 12
- 239000010703 silicon Substances 0.000 description 12
- 239000011248 coating agent Substances 0.000 description 11
- 238000000576 coating method Methods 0.000 description 11
- 230000007423 decrease Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 238000012935 Averaging Methods 0.000 description 4
- 230000003187 abdominal effect Effects 0.000 description 4
- 230000004936 stimulating effect Effects 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000005549 size reduction Methods 0.000 description 3
- 239000000126 substance Substances 0.000 description 3
- 210000003489 abdominal muscle Anatomy 0.000 description 2
- 239000012141 concentrate Substances 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000035807 sensation Effects 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 235000014676 Phragmites communis Nutrition 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 239000002390 adhesive tape Substances 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 229910021418 black silicon Inorganic materials 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000004040 coloring Methods 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 238000011010 flushing procedure Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 230000004118 muscle contraction Effects 0.000 description 1
- 210000001087 myotubule Anatomy 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 210000000689 upper leg Anatomy 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
Images



















Landscapes
- Electrotherapy Devices (AREA)
Abstract
Description
上記制御部は、同一極性の電圧が印加される複数の端子を有し、
上記リード部は、上記複数の端子同士を接続する端子接続部と、該端子接続部と上記複数の電極とを接続する電極接続部と、を有し、
上記各電極のそれぞれから上記端子までの最短経路の長さはそれぞれ、上記最短経路の平均長さとの差が、該平均長さの20%未満となっていることを特徴とする筋肉電気刺激装置にある。
実施例に係る筋肉電気刺激装置につき、図1〜図15を用いて説明する。
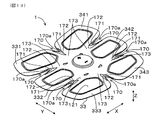
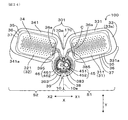
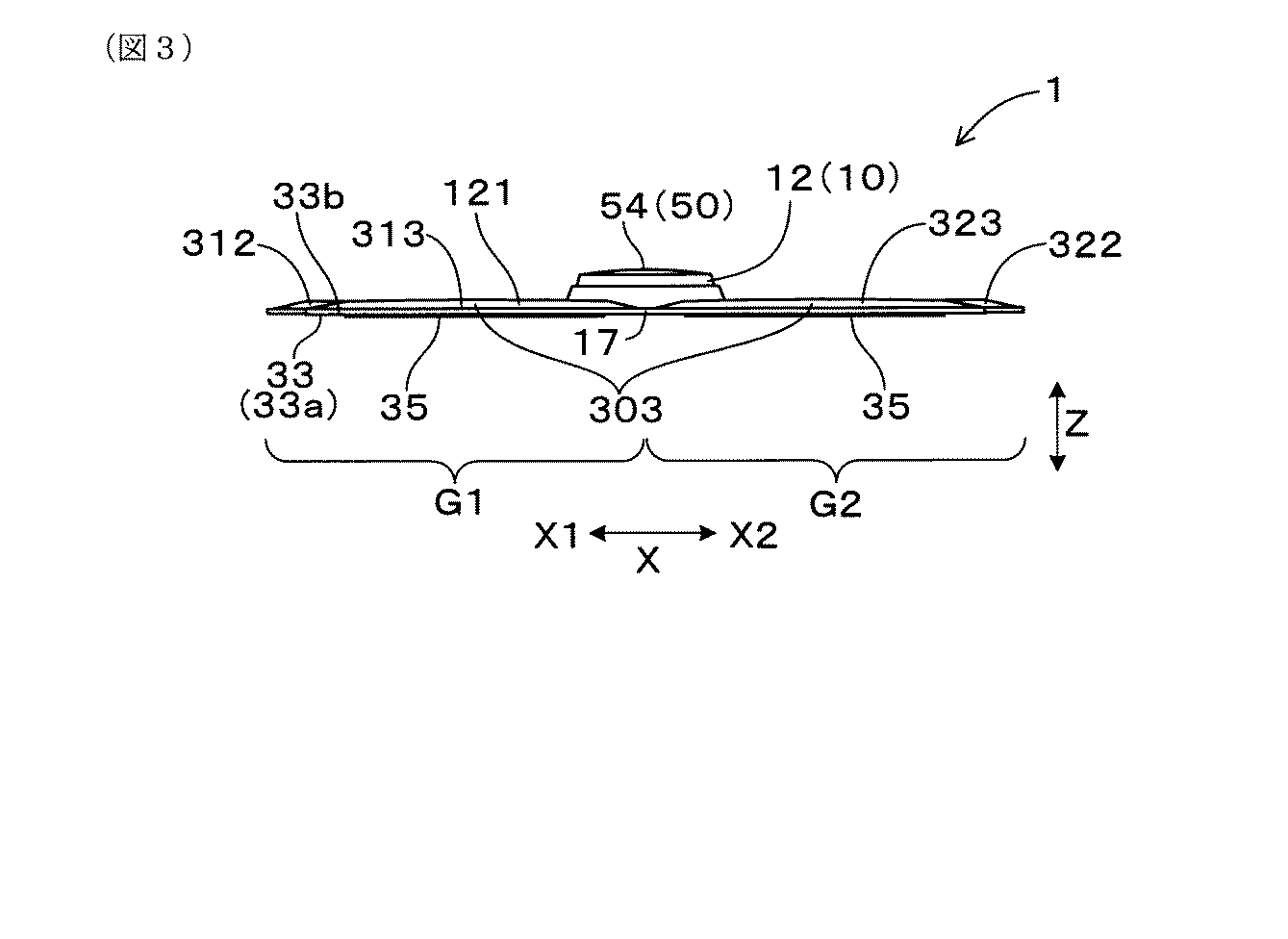
本例の筋肉電気刺激装置1は、図1、図2に示すように、本体部10、電源部20、電極部30、制御部40、リード部38(39)を備える。電源部20及び制御部40は、本体部10に収納されている。電極部30は、電源部20から電力が供給される3個以上の電極311〜313(321〜323)を有する。制御部40は、電極部30への電力供給を制御する。リード部38(39)は電極部30と制御部40とを電気的に接続する。そして、筋肉電気刺激装置1は、電極部30から人体2(図5参照)に電気刺激を付与するように構成されている。
制御部40は、同一極性の電圧が印加される複数の端子451、452(461、462)を有する。
リード部38(39)は、複数の端子451、452(461、462)同士を接続する端子接続部383(393)と、端子接続部383(393)と電極311〜313(321〜323)とを接続する電極接続部385〜387(395〜397)と、を有する。
各電極311〜313(321〜323)から端子451、452(461、462)までの最短経路L1〜L3(L4〜L6)の長さはそれぞれ、最短経路L1〜L3(L4〜L6)の平均長さとの差が、平均長さの20%未満となっている。
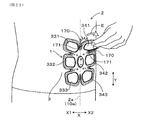
本例の筋肉電気刺激装置1は、図5に示すように、人体2の腹部3に取り付けて使用される。そして、本例では、人体2の背丈の長手方向を身長方向Yとする。また、人体2の正面に面して、身長方向Yに平行でへそ3aを通る人体2の中心軸2aから人体2の右手5a側への方向を右方向X1とし、中心軸2aから人体2の左手5b側への方向を左方向X2とする。そして、右方向X1と左方向X2とを合わせて左右方向Xという。
また、第2右側基部332の中央外縁部332aは右方向X1に若干膨出しており、第2左側基部342の中央外縁部342aは左方向X2に若干膨出している。
さらに、第3右側基部333の上方外縁部333aは右方向X1に膨出しており、第3右側基部333の下方外縁部333bは下方向(Y方向における下側方向)に膨出している。また、第3左側基部343の上方外縁部343aは左方向X2に膨出しており、第3左側基部343の下方外縁部343bは下方向に膨出している。
図8に示すように、筋肉電気刺激装置1は、本体部10の内部に、電源部20、制御部40、操作部50を備えるとともに、肌検知部402及び電池電圧検出部406を備える。
まず、継続時間記憶部としての出力モード記憶部405aには、図9に示す5つのバースト波パターン(基本波形B1〜B5)が記憶されている。各基本波形B1〜B5は、パルス群出力期間Pとパルス群出力中断期間R1〜R5とからなる。すなわち、各基本波形B1〜B5は、共通のパルス群出力期間Pを有しているとともに、パルス群出力中断期間R1〜R5の長さが異なっている。
また、第2バースト波(4Hz)は、1msのパルス群出力期間Pと、249msのパルス群出力中断期間R2とからなる。すなわち、第2バースト波(4Hz)は、パルス群出力期間Pが4Hzの周波数で出力されるものである。
また、第3バースト波(8Hz)は、1msのパルス群出力期間Pと、124msのパルス群出力中断期間R3とからなる。すなわち、第3バースト波(8Hz)は、パルス群出力期間Pが8Hzの周波数で出力されるものである。
また、第4バースト波(16Hz)は、1msのパルス群出力期間Pと、61.5msのパルス群出力中断期間R4とからなる。すなわち、第4バースト波(16Hz)は、パルス群出力期間Pが16Hzの周波数で出力されるものである。
また、第5バースト波(20Hz)は、1msのパルス群出力期間Pと、49msのパルス群出力中断期間R5とからなる。すなわち、第5バースト波(20Hz)は、パルス群出力期間Pが20Hzの周波数で出力されるものである。
(1)第1ステータスでは、第1バースト波(2Hz)で20秒間、100%の出力を行う。なお、図11に示すように、第1ステータスにおける開始5秒間は出力電圧を0%から徐々に大きくして100%にする、いわゆるソフトスタートを行う。
(2)第2ステータスでは、第2バースト波(4Hz)で20秒間、100%の出力を行う。
(3)第3ステータスでは、第3バースト波(8Hz)で10秒間、100%の出力を行う。
(4)第4ステータスでは、第4バースト波(16Hz)で10秒間、100%の出力を行う。
そして、第1出力モードの継続期間(すなわち、第1ステータス〜第4ステータスの継続期間の合計)は1分間である。かかる第1出力モードでは、バースト波の周波数が2Hzから16Hzへ段階的に高くなるように構成されているため、第1出力モードをウォームアップモードと呼んでいる。
(1)第1ステータスでは、第5バースト波(20Hz)で3秒間、100%の出力を行った後、出力なしを2秒間維持する。これを5分間繰り返す。
(2)第2ステータスでは、第5バースト波(20Hz)で3秒間、100%の出力を行った後、第2バースト波(4Hz)で2秒間、100%の出力を行う。これを5分間繰り返す。
(3)第3ステータスでは、第5バースト波(20Hz)で4秒間、100%の出力を行った後、第2バースト波(4Hz)で2秒間、100%の出力を行う。これを5分間繰り返す。
(4)第4ステータスでは、第5バースト波(20Hz)で5秒間、100%の出力を行った後、第2バースト波(4Hz)で2秒間、100%の出力を行う。これを5分間繰り返す。
なお、図11に示すように、第2出力モードでは第1ステータス〜第4ステータスにおけるそれぞれの開始5秒間は、出力電圧を0%から徐々に大きくして100%にする、いわゆるソフトスタートを行う。
そして、第2出力モードの継続期間は20分間である。かかる第2出力モードでは、周波数20Hzの第5バースト波を所定期間維持した後、出力なし又は周波数4Hzの第2バースト波を所定期間維持するため、筋肉を効果的に刺激するのに優れている。そのため、第2出力モードをトレーニングモードと呼んでいる。
(1)第1ステータスでは、第4バースト波(16Hz)で10秒間、出力を行う。
(2)第2ステータスでは、第3バースト波(8Hz)で10秒間、出力を行う。
(3)第3ステータスでは、第2バースト波(4Hz)で20秒間、出力を行う。
(4)第4ステータスでは、第1バースト波(2Hz)で20秒間、出力を行う。
なお、第3出力モードでは、各ステータスにおける出力は、図11に示すように、第1ステータス開始時には100%とし、第4ステータス終了時に50%となるように徐々に減少させる。
そして、第3出力モードの継続期間は1分間である。かかる第3出力モードでは、バースト波の周波数が16Hzから2Hzへ段階的に低くなるように構成されているため、第3出力モードをクールダウンモードと呼んでいる。
図12に示すメイン動作フローS100について説明する。メイン動作フローS100では、まず、操作面54の「+」を2秒間押下する(S101)。これにより、筋肉電気刺激装置1の電源がオンとなって、筋肉電気刺激装置1が起動されるとともに、起動されたことを通知する通知音(「ピー」)が、スピーカ43により発せられる(S102)。その後、筋肉電気刺激装置1は、出力待機状態となり出力レベルが0にされるとともに、操作部50の入力が無効化される(S103)
上記筋肉電気刺激装置1では、複数の電極311〜313(321〜323)のそれぞれから端子451、452(461、462)までの最短経路L1〜L3(L4〜L6)の長さはそれぞれ、最短経路L1〜L3(L4〜L6)の平均長さとの差が、該平均長さの20%未満となっている。そのため、電極311〜313(321〜323)と制御部40との通電距離にばらつきが生じにくく、電極311〜313(321〜323)と制御部40とを電気的に接続するリード部38(39)における電気抵抗の電極ごとのばらつきを低減できる。そのため、各電極311〜313(321〜323)から出力される電気刺激がばらつきにくくなり、筋肉にバランス良く電気刺激を付与することができる。
(2a)第2aステータスでは、第2バースト波(4Hz)で10秒間、100%の出力を行った後、第3バースト波(8Hz)で10秒間、100%の出力を行い、さらにその後、第4バースト波(16Hz)で10秒間、100%の出力を行う。
(3a)第3aステータスでは、第2バースト波(4Hz)で10秒間、100%の出力を行った後、第3バースト波(8Hz)で10秒間、100%の出力を行い、さらにその後、第4バースト波(16Hz)で10秒間、100%の出力を行う。
なお、当該変形例1では、本例の第2出力モード(表2参照)に比べて第2aステータス及び第3aステータスが追加されているため、表4に示す第1出力モード(ウォームアップモード)、第2出力モード(トレーニングモード)及び第3出力モード(クールダウンモード)を連続して行った場合の合計時間は23分間となる。
そして、中断期間継続時間算出部405bは、周波数選択部(操作面54a)により選択された周波数に基づいてパルス群出力中断期間の継続時間を算出する。
中断期間継続時間設定部405cは、中断期間継続時間算出部405bによって算出された上記継続時間に基づいて上記パルス群出力中断期間の継続時間を設定する。
なお、変形例2において実施例1と同等の構成要素には同一の符号を付してその説明を省略する。
実施例1では、6個の電極311〜313、321〜323を備えることとしたが、本実施例2では、図17に示すように、8個の電極311〜314、321〜324を備える。本例において、実施例1と同等の要素には同一の符号を付して、その説明を省略する。
第2電極群32には、第3左側電極323よりも本体部10に近く、第2左側電極322よりも本体部10から遠い位置であって、第2左側電極322と第3左側電極323との間に位置し、第1左側電極321、第2左側電極322及び第3左側電極323とともに円弧状又は線状に並んだ第4左側電極324が含まれている。
また、第2リード部39は、第3端子461及び第4端子462から第2端子接続部393を介して第4左側電極324に接続されるとともに第1左側経路L4と略同じ長さを有する第4左側経路L8を有する。したがって、第4左側経路L8の長さも、最短経路の平均長さとの差が、当該平均長さの20%未満となっている。
本例の場合も、実施例1の場合と同等の作用効果を奏する
本実施例3では、実施例1における切り込み部17(図1参照)に替えて、図18に示すように、切り込み部170を備えるとともに、切り込み部17の周囲の構成を変更している。なお、本例において、実施例1と同等の要素には同一の符号を付して、その説明を省略する。
本実施例3の筋肉電気刺激装置1において、図18、図19に示すように、切り込み部170の先端部170a(切り込み部170の最も奥の部分)は、実施例1の切り込み部17の先端部17a(図1参照)に比べて、曲率半径が大きくなっている。図18に示すように、平面視における先端部170aの曲率半径は2.0mm〜5.0mmとすることができ、本例では2.5mmとしている。
変形例3の筋肉電気刺激装置100では、図23、図24に示すように、実施例3と同等の切り込み部170及び厚肉部171を有する。そして、電極として、実施例3の電極311、321と同様の構成ではあるが、一回り大きい電極311、321を2個備える。なお、変形例3において実施例3と同等の構成要素には同一の符号を付して、その説明を省略する。
(1) 複数の電極311、321を有するシート状のベース体(基材33及び電極支持部121)を備え、上記電極311、321から人体に電気刺激を付与するように構成された筋肉電気刺激装置100であって、
上記ベース体(基材33及び電極支持部121)には、互いに隣り合う上記電極311、321の間に内方に向って切り込まれた切り込み部170が形成されているとともに、該切り込み部170の縁部には、該縁部の周囲(周囲部173)よりも厚さが大きい厚肉部171が形成されている、筋肉電気刺激装置100。
(2) 上記切り込み部170の先端170aは、平面視において曲率半径が2.0mm〜5.0mmの範囲内の湾曲形状をなしている、上記(1)に記載の筋肉電気刺激装置100。
(3) 上記厚肉部171の厚さt2は、上記縁部の周囲(周囲部173)の厚さt1の1.5〜5.0倍の範囲内である、上記(1)又は(2)に記載の筋肉電気刺激装置100。
(4) 上記ベース体(基材33及び電極支持部121)は、上記複数の電極が形成されたシート状の基材33と、該基材33に積層された電極支持部121とからなり、上記厚肉部171における上記電極支持部121の厚さは、上記厚肉部171の周囲(周囲部173)における厚さよりも大きくなっている、上記(1)〜(3)のいずれか一つに記載の筋肉電気刺激装置100。
(5) 上記ベース体(基材33及び電極支持部121)には、上記厚肉部171と、上記切り込み部170の縁部の周囲(周囲部173)との間に、厚肉部171から周囲部173に向うにつれて厚さが小さくなる徐変部172が形成されている、上記(1)〜(4)のいずれか一つに記載の筋肉電気刺激装置100。
(6) 上記ベース体(基材33及び電極支持部121)の外縁のうち、上記切り込み部170の縁部を除く部分の厚さは、上記厚肉部171よりも薄くなっている、上記(1)〜(5)のいずれか一つに記載の筋肉電気刺激装置100。
10 本体部
10a 中心線
20 電源部
30 電極部
311、312、313、321、322、323 電極
33 基材
35 パッド
36 パッド貼り付け部
38、39 リード部
40 制御部
Claims (6)
- 本体部と、該本体部に収納される電源部と、該電源部から電力が供給される3個以上の電極を有する電極部と、該電極部への電力供給を制御するとともに上記本体部に収納される制御部と、上記電極部と上記制御部とを電気的に接続するリード部と、を備え、上記電極部から人体に電気刺激を付与するように構成された筋肉電気刺激装置であって、
上記制御部は、同一極性の電圧が印加される複数の端子を有し、
上記リード部は、上記複数の端子同士を接続する端子接続部と、該端子接続部と上記電極とを接続する電極接続部と、を有し、
上記各電極から上記端子までの最短経路の長さはそれぞれ、上記最短経路の平均長さとの差が、該平均長さの20%未満となっていることを特徴とする筋肉電気刺激装置。 - 上記3個以上の電極は、同一の仮想直線上に位置するように配置されていることを特徴とする請求項1に記載の筋肉電気刺激装置。
- 上記同一極性の端子は、2個備えられていることを特徴とする請求項1又は2に記載の筋肉電気刺激装置。
- 上記電極部は、上記電極を3個有することを特徴とする請求項1〜3のいずれか一項に記載の筋肉電気刺激装置。
- 上記電極部は、上記電極を4個有することを特徴とする請求項1〜3のいずれか一項に記載の筋肉電気刺激装置。
- 上記複数の端子、上記3個以上の電極及び上記リード部はそれぞれ、上記本体部の中心を通る中心線により二分された一方の領域及び他方の領域の両方に配置されているとともに、上記一方の領域に配置される上記電極と上記他方の領域に配置される上記電極とは、互いに異なる極性の電圧が印加されるように構成されていることを特徴とする請求項1〜5のいずれか一項に記載の筋肉電気刺激装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015122381 | 2015-06-17 | ||
| JP2015122381 | 2015-06-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017006644A true JP2017006644A (ja) | 2017-01-12 |
Family
ID=57762213
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016106643A Pending JP2017006644A (ja) | 2015-06-17 | 2016-05-27 | 筋肉電気刺激装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017006644A (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3395399A1 (en) | 2017-04-27 | 2018-10-31 | MTG Co., Ltd. | Muscle electrostimulation device |
| EP3395398A1 (en) | 2017-04-27 | 2018-10-31 | MTG Co., Ltd. | Muscle electrostimulation device |
| EP3395401A1 (en) | 2017-04-24 | 2018-10-31 | MTG Co., Ltd. | Exercise instrument controller and exercise instrument control program |
| KR101977734B1 (ko) * | 2018-09-20 | 2019-05-13 | (주)스마트메디칼디바이스 | 근육 운동을 위한 전기 자극기 |
| CN110913944A (zh) * | 2018-06-08 | 2020-03-24 | 株式会社好玛研究所 | 电刺激装置 |
| JP2020081148A (ja) * | 2018-11-20 | 2020-06-04 | 株式会社 Mtg | トレーニング方法 |
| KR20200112882A (ko) | 2018-01-31 | 2020-10-05 | 가부시키가이샤 엠티지 | 근육 전기 자극 장치 |
| WO2021025042A1 (ja) | 2019-08-06 | 2021-02-11 | 株式会社Mtg | 電気刺激フィットネスウェア |
| JP2021027990A (ja) * | 2019-08-09 | 2021-02-25 | 株式会社 Mtg | 筋肉刺激方法および中枢神経系刺激方法 |
| CN114288549A (zh) * | 2021-12-29 | 2022-04-08 | 广州万古医疗科技有限公司 | 一种肌骨细胞能量板及应用 |
| CN114502236A (zh) * | 2019-10-04 | 2022-05-13 | 日本光电工业株式会社 | 体电极和体电极单元 |
| KR20240021810A (ko) | 2021-06-14 | 2024-02-19 | 가부시키가이샤 엠티지 | 전기 자극 피트니스 웨어 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010131253A (ja) * | 2008-12-05 | 2010-06-17 | Japan Esthetique Kyokai:Kk | 電気筋肉刺激装置 |
| WO2013181508A1 (en) * | 2012-05-31 | 2013-12-05 | Zoll Medical Corporation | Long term wear multifunction biomedical electrode |
| US20140236258A1 (en) * | 2013-02-21 | 2014-08-21 | Meagan Medical, Inc. | Cutaneous field stimulation with disposable and rechargeable components |
-
2016
- 2016-05-27 JP JP2016106643A patent/JP2017006644A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010131253A (ja) * | 2008-12-05 | 2010-06-17 | Japan Esthetique Kyokai:Kk | 電気筋肉刺激装置 |
| WO2013181508A1 (en) * | 2012-05-31 | 2013-12-05 | Zoll Medical Corporation | Long term wear multifunction biomedical electrode |
| US20140236258A1 (en) * | 2013-02-21 | 2014-08-21 | Meagan Medical, Inc. | Cutaneous field stimulation with disposable and rechargeable components |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180119088A (ko) | 2017-04-24 | 2018-11-01 | 가부시키가이샤 엠티지 | 운동 기구 제어 장치 및 운동 기구 제어 프로그램 |
| US10792494B2 (en) | 2017-04-24 | 2020-10-06 | Mtg Co., Ltd. | Exercise instrument controller and exercise instrument control program |
| EP3395401A1 (en) | 2017-04-24 | 2018-10-31 | MTG Co., Ltd. | Exercise instrument controller and exercise instrument control program |
| KR20180120555A (ko) | 2017-04-27 | 2018-11-06 | 가부시키가이샤 엠티지 | 근육 전기 자극 장치 |
| US20180311493A1 (en) * | 2017-04-27 | 2018-11-01 | Mtg Co., Ltd. | Muscle electrostimulation device |
| EP3395399A1 (en) | 2017-04-27 | 2018-10-31 | MTG Co., Ltd. | Muscle electrostimulation device |
| EP3395398A1 (en) | 2017-04-27 | 2018-10-31 | MTG Co., Ltd. | Muscle electrostimulation device |
| KR20230029723A (ko) | 2017-04-27 | 2023-03-03 | 가부시키가이샤 엠티지 | 근육 전기 자극 장치 |
| KR20200112882A (ko) | 2018-01-31 | 2020-10-05 | 가부시키가이샤 엠티지 | 근육 전기 자극 장치 |
| CN110913944A (zh) * | 2018-06-08 | 2020-03-24 | 株式会社好玛研究所 | 电刺激装置 |
| CN110913944B (zh) * | 2018-06-08 | 2023-08-15 | 株式会社好玛研究所 | 电刺激装置 |
| KR101977734B1 (ko) * | 2018-09-20 | 2019-05-13 | (주)스마트메디칼디바이스 | 근육 운동을 위한 전기 자극기 |
| JP2022180435A (ja) * | 2018-11-20 | 2022-12-06 | 株式会社 Mtg | トレーニング方法 |
| JP2020081148A (ja) * | 2018-11-20 | 2020-06-04 | 株式会社 Mtg | トレーニング方法 |
| KR20220044959A (ko) | 2019-08-06 | 2022-04-12 | 가부시키가이샤 엠티지 | 전기자극 피트니스 웨어 |
| WO2021025042A1 (ja) | 2019-08-06 | 2021-02-11 | 株式会社Mtg | 電気刺激フィットネスウェア |
| JP2021027990A (ja) * | 2019-08-09 | 2021-02-25 | 株式会社 Mtg | 筋肉刺激方法および中枢神経系刺激方法 |
| JP7589912B2 (ja) | 2019-08-09 | 2024-11-26 | 株式会社 Mtg | トレーニングシステム |
| CN114502236A (zh) * | 2019-10-04 | 2022-05-13 | 日本光电工业株式会社 | 体电极和体电极单元 |
| KR20240021810A (ko) | 2021-06-14 | 2024-02-19 | 가부시키가이샤 엠티지 | 전기 자극 피트니스 웨어 |
| KR20250150162A (ko) | 2021-06-14 | 2025-10-17 | 가부시키가이샤 엠티지 | 착용시 힙의 근육량 증가 효과가 기대되는 웨어러블 ems 기기 |
| CN114288549A (zh) * | 2021-12-29 | 2022-04-08 | 广州万古医疗科技有限公司 | 一种肌骨细胞能量板及应用 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017006644A (ja) | 筋肉電気刺激装置 | |
| JP6367510B1 (ja) | 筋肉電気刺激装置 | |
| TWI659761B (zh) | 肌肉電刺激裝置 | |
| CN107073270B (zh) | 肌肉电刺激装置 | |
| JP6517079B2 (ja) | 筋肉電気刺激装置 | |
| JP2016202796A (ja) | 筋肉電気刺激装置 | |
| JP2016202409A (ja) | 筋肉電気刺激気装置 | |
| JP2017006215A (ja) | 筋肉電気刺激装置 | |
| JP5976977B1 (ja) | 筋肉電気刺激装置 | |
| JP6476063B2 (ja) | 筋肉電気刺激装置 | |
| JP2018183454A (ja) | 電圧印加装置 | |
| HK1228821A1 (en) | Muscular electric stimulator | |
| JP2016209508A (ja) | 筋肉電気刺激装置 | |
| JP2018114026A (ja) | 筋肉電気刺激装置 | |
| HK1243019A1 (en) | Muscular electric stimulation device | |
| HK1243019B (en) | Muscular electric stimulation device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190508 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200203 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200519 |