JP2016502677A - ロケーション環境識別子(lci)のための複数のマップの処理および管理 - Google Patents
ロケーション環境識別子(lci)のための複数のマップの処理および管理 Download PDFInfo
- Publication number
- JP2016502677A JP2016502677A JP2015539618A JP2015539618A JP2016502677A JP 2016502677 A JP2016502677 A JP 2016502677A JP 2015539618 A JP2015539618 A JP 2015539618A JP 2015539618 A JP2015539618 A JP 2015539618A JP 2016502677 A JP2016502677 A JP 2016502677A
- Authority
- JP
- Japan
- Prior art keywords
- map
- format
- maps
- building
- similarities
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012545 processing Methods 0.000 title description 6
- 238000000034 method Methods 0.000 claims abstract description 58
- 230000015654 memory Effects 0.000 claims description 16
- 230000006870 function Effects 0.000 claims description 13
- 238000004891 communication Methods 0.000 description 10
- 238000011960 computer-aided design Methods 0.000 description 9
- 230000003416 augmentation Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 7
- 230000004927 fusion Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 4
- 210000002837 heart atrium Anatomy 0.000 description 4
- 230000004044 response Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 238000007726 management method Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000003909 pattern recognition Methods 0.000 description 2
- 230000000717 retained effect Effects 0.000 description 2
- 238000003491 array Methods 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/10—Geometric CAD
- G06F30/13—Architectural design, e.g. computer-aided architectural design [CAAD] related to design of buildings, bridges, landscapes, production plants or roads
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V30/00—Character recognition; Recognising digital ink; Document-oriented image-based pattern recognition
- G06V30/40—Document-oriented image-based pattern recognition
- G06V30/41—Analysis of document content
- G06V30/418—Document matching, e.g. of document images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V30/00—Character recognition; Recognising digital ink; Document-oriented image-based pattern recognition
- G06V30/40—Document-oriented image-based pattern recognition
- G06V30/42—Document-oriented image-based pattern recognition based on the type of document
- G06V30/422—Technical drawings; Geographical maps
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Geometry (AREA)
- Artificial Intelligence (AREA)
- Computer Hardware Design (AREA)
- Automation & Control Theory (AREA)
- Structural Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Evolutionary Computation (AREA)
- Pure & Applied Mathematics (AREA)
- Mathematical Optimization (AREA)
- Mathematical Analysis (AREA)
- Computational Mathematics (AREA)
- Civil Engineering (AREA)
- Architecture (AREA)
- Navigation (AREA)
- Instructional Devices (AREA)
- Processing Or Creating Images (AREA)
Abstract
Description
発明の実施形態が図面を参照して、単なる例として、説明されることになる。
[0024] 添付図面に関して以下に記載される詳細な説明は、本開示の様々な態様の説明として意図され、本開示が実現され得る唯一の態様を表すことを意図したものでない。本開示で説明される各態様は単に本開示の例または例示として提供され、他の態様に対して必ずしも好ましいまたは有利であると解釈されるべきでない。詳細な説明は、本開示の完全な理解を提供する目的で複数の特定の詳細を含む。しかしながら、本開示がこれら特定の詳細なしで実現され得ることは当業者にとって明らかであろう。いくつかの事例では、周知の構造およびデバイスが本開示の概念を曖昧にしないためにブロック図形式で示されている。頭文字および他の記述的な用語は、単に利便性および明確性のために使用され得るもので、本開示の範囲を限定することを意図したものでない。
以下に、本願出願の当初の特許請求の範囲に記載された発明を付記する。
[C1] 測位サーバによって使用される複数のマップをマージするための方法であって、
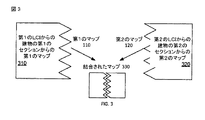
第1のフォーマットにある第1のマップを受信することと、
第2のフォーマットにある第2のマップを受信することと、ここにおいて前記第1のマップと前記第2のマップとは関連するものである、
前記第1のマップをスケーリングし、回転させ、前記第2のマップに対して整合させることと、
マージされたマップを形成するために前記第1のマップと前記第2のマップとの間の類似点を抽出することと、
を備える、方法。
[C2] 前記第1のマップおよび前記第2のマップは各々内壁を備える、C1に記載の方法。
[C3] 前記第1のマップおよび前記第2のマップは共通の建物の共通のフロアプランをカバーする屋内マップを備える、C1に記載の方法。
[C4] 前記第1のマップおよび前記第2のマップは共通の建物の隣接するフロアプランをカバーする屋内マップを備える、C1に記載の方法。
[C5] 前記第1のマップおよび前記第2のマップは、
前記第1のマップが建物を備える屋外マップであって、
前記第2のマップが前記建物のフロアプランである ことにおいて関連するものである、C1に記載の方法。
[C6] 前記第1のフォーマットおよび前記第2のマップは異なるフォーマットのものである、C1に記載の方法。
[C7] 前記第1のマップおよび前記第2のマップは2つの異なるソースからのものである、C1に記載の方法。
[C8] 前記第1のフォーマットはラスタ画像であり、前記第2のフォーマットはベクトルマップである、C1に記載の方法。
[C9] 前記類似点を抽出する前に、前記第1のマップにおける注釈を除去することと、前記第2のマップの注釈を除去することとをさらに備える、C1に記載の方法。
[C10] 前記類似点を抽出することは、前記第1のマップと前記第2のマップとをオーバレイすることと、類似の壁構造を有する領域を識別することとを備える、C1に記載の方法。
[C11] 前記類似点を抽出することは、特徴を揃えることによって前記第1のマップを前記第2のマップに結合することを備える、C1に記載の方法。
[C12] 前記類似点を抽出することは、
屋外マップを備える前記第1のマップから外壁の境界を決定することと、
屋内マップを備える前記第2のマップから外壁の境界を決定することと、
前記第1のマップの前記外壁の境界上に前記第2のマップの前記外壁の境界をオーバレイすることと、
を備える、C1に記載の方法。
[C13] 前記第1のマップと前記第2のマップとの間の差を決定することと、
前記差をメタデータとして位置ベースのサーバに送ることと、
をさらに備える、C1に記載の方法。
[C14] 前記マージされたマップを使用して測位支援データを生成することをさらに備える、C1に記載の方法。
[C15] 前記測位支援データをモバイルデバイスに送ることをさらに備える、C14に記載の方法。
[C16] 測位サーバによって使用される複数のマップをマージするためのデバイスであって、
第1のフォーマットにある第1のマップを受信するための手段と、
第2のフォーマットにある第2のマップを受信するための手段と、ここにおいて前記第1のマップと前記第2のマップとは関連するものである、
前記第1のマップをスケーリングし、回転させ、前記第2のマップに対して整合させるための手段と、
マージされたマップを形成するために前記第1のマップと前記第2のマップとの間の類似点を抽出するための手段と、
を備える、デバイス。
[C17] 前記第1のマップおよび前記第2のマップは各々内壁を備える、C16に記載のデバイス。
[C18] 前記第1のマップおよび前記第2のマップは共通の建物の共通のフロアプランをカバーする屋内マップを備える、C16に記載のデバイス。
[C19] 前記第1のマップおよび前記第2のマップは共通の建物の隣接するフロアプランをカバーする屋内マップを備える、C16に記載のデバイス。
[C20] 前記第1のマップおよび前記第2のマップは、
前記第1のマップが建物を備える屋外マップであって、
前記第2のマップが前記建物のフロアプランであることにおいて関連するものである、C16に記載のデバイス。
[C21] 前記第1のフォーマットおよび前記第2のマップは異なるフォーマットのものである、C16に記載のデバイス。
[C22] 前記第1のマップおよび前記第2のマップは2つの異なるソースからのものである、C16に記載のデバイス。
[C23] 前記第1のフォーマットはラスタ画像であり、前記第2のフォーマットはベクトルマップである、C16に記載のデバイス。
[C24] 前記第1のマップにおける注釈を除去し、前記第2のマップの注釈を除去するための手段をさらに備え、これは前記類似点を抽出するための前記手段の前に機能する、C16に記載のデバイス。
[C25] 測位サーバによって使用される複数のマップをマージするためのデバイスであって、前記デバイスはプロセッサおよびメモリを備え、ここにおいて、前記メモリは、
第1のフォーマットにある第1のマップを受信することと、
第2のフォーマットにある第2のマップを受信することと、ここにおいて前記第1のマップと前記第2のマップとは関連するものである、
前記第1のマップをスケーリングし、回転させ、前記第2のマップに対して整合させることと、
マージされたマップを形成するために前記第1のマップと前記第2のマップの間の類似点を抽出することのための複数のソフトウェア命令を含む、デバイス。
[C26] 前記第1のマップおよび前記第2のマップは各々内壁を備える、C25に記載のデバイス。
[C27] 前記第1のマップおよび前記第2のマップは共通の建物の共通のフロアプランをカバーする屋内マップを備える、C25に記載のデバイス。
[C28] 前記第1のマップおよび前記第2のマップは共通の建物の隣接するフロアプランをカバーする屋内マップを備える、C25に記載のデバイス。
[C29] 前記第1のフォーマットおよび前記第2のマップは異なるフォーマットのものである、C25に記載のデバイス。
[C30]
前記第1のマップおよび前記第2のマップは2つの異なるソースからのものである、C25に記載のデバイス。
[C31]
測位サーバによって使用される複数のマップをマージするためにその上に記憶されたプログラムコードを含む不揮発性コンピュータ可読記憶媒体であって、
第1のフォーマットにある第1のマップを受信することと、
第2のフォーマットにある第2のマップを受信することと、ここにおいて前記第1のマップと前記第2のマップとは関連するものである、
前記第1のマップをスケーリングし、回転させ、前記第2のマップに対して整合させることと、
マージされたマップを形成するために前記第1のマップと前記第2のマップとの間の類似点を抽出することのためのプログラムコードを備える、不揮発性コンピュータ可読記憶媒体。
[C32]
前記第1のマップおよび前記第2のマップは各々内壁を備える、C31に記載の不揮発性コンピュータ可読記憶媒体。
[C33]
前記第1のマップおよび前記第2のマップは共通の建物の共通のフロアプランをカバーする屋内マップを備える、C31に記載の不揮発性コンピュータ可読記憶媒体。
[C34]
前記第1のマップおよび前記第2のマップは共通の建物の隣接するフロアプランをカバーする屋内マップを備える、C31に記載の不揮発性コンピュータ可読記憶媒体。
[C35]
前記第1のフォーマットおよび前記第2のマップは異なるフォーマットのものである、C31に記載の不揮発性コンピュータ可読記憶媒体。
[C36]
前記第1のマップおよび前記第2のマップは2つの異なるソースからのものである、C31に記載の不揮発性コンピュータ可読記憶媒体。
Claims (36)
- 測位サーバによって使用される複数のマップをマージするための方法であって、
第1のフォーマットにある第1のマップを受信することと、
第2のフォーマットにある第2のマップを受信することと、ここにおいて前記第1のマップと前記第2のマップとは関連するものである、
前記第1のマップをスケーリングし、回転させ、前記第2のマップに対して整合させることと、
マージされたマップを形成するために前記第1のマップと前記第2のマップとの間の類似点を抽出することと、
を備える、方法。 - 前記第1のマップおよび前記第2のマップは各々内壁を備える、請求項1に記載の方法。
- 前記第1のマップおよび前記第2のマップは共通の建物の共通のフロアプランをカバーする屋内マップを備える、請求項1に記載の方法。
- 前記第1のマップおよび前記第2のマップは共通の建物の隣接するフロアプランをカバーする屋内マップを備える、請求項1に記載の方法。
- 前記第1のマップおよび前記第2のマップは、
前記第1のマップが建物を備える屋外マップであって、
前記第2のマップが前記建物のフロアプランである ことにおいて関連するものである、請求項1に記載の方法。 - 前記第1のフォーマットおよび前記第2のマップは異なるフォーマットのものである、請求項1に記載の方法。
- 前記第1のマップおよび前記第2のマップは2つの異なるソースからのものである、請求項1に記載の方法。
- 前記第1のフォーマットはラスタ画像であり、前記第2のフォーマットはベクトルマップである、請求項1に記載の方法。
- 前記類似点を抽出する前に、前記第1のマップにおける注釈を除去することと、前記第2のマップの注釈を除去することとをさらに備える、請求項1に記載の方法。
- 前記類似点を抽出することは、前記第1のマップと前記第2のマップとをオーバレイすることと、類似の壁構造を有する領域を識別することとを備える、請求項1に記載の方法。
- 前記類似点を抽出することは、特徴を揃えることによって前記第1のマップを前記第2のマップに結合することを備える、請求項1に記載の方法。
- 前記類似点を抽出することは、
屋外マップを備える前記第1のマップから外壁の境界を決定することと、
屋内マップを備える前記第2のマップから外壁の境界を決定することと、
前記第1のマップの前記外壁の境界上に前記第2のマップの前記外壁の境界をオーバレイすることと、
を備える、請求項1に記載の方法。 - 前記第1のマップと前記第2のマップとの間の差を決定することと、
前記差をメタデータとして位置ベースのサーバに送ることと、
をさらに備える、請求項1に記載の方法。 - 前記マージされたマップを使用して測位支援データを生成することをさらに備える、請求項1に記載の方法。
- 前記測位支援データをモバイルデバイスに送ることをさらに備える、請求項14に記載の方法。
- 測位サーバによって使用される複数のマップをマージするためのデバイスであって、
第1のフォーマットにある第1のマップを受信するための手段と、
第2のフォーマットにある第2のマップを受信するための手段と、ここにおいて前記第1のマップと前記第2のマップとは関連するものである、
前記第1のマップをスケーリングし、回転させ、前記第2のマップに対して整合させるための手段と、
マージされたマップを形成するために前記第1のマップと前記第2のマップとの間の類似点を抽出するための手段と、
を備える、デバイス。 - 前記第1のマップおよび前記第2のマップは各々内壁を備える、請求項16に記載のデバイス。
- 前記第1のマップおよび前記第2のマップは共通の建物の共通のフロアプランをカバーする屋内マップを備える、請求項16に記載のデバイス。
- 前記第1のマップおよび前記第2のマップは共通の建物の隣接するフロアプランをカバーする屋内マップを備える、請求項16に記載のデバイス。
- 前記第1のマップおよび前記第2のマップは、
前記第1のマップが建物を備える屋外マップであって、
前記第2のマップが前記建物のフロアプランであることにおいて関連するものである、請求項16に記載のデバイス。 - 前記第1のフォーマットおよび前記第2のマップは異なるフォーマットのものである、請求項16に記載のデバイス。
- 前記第1のマップおよび前記第2のマップは2つの異なるソースからのものである、請求項16に記載のデバイス。
- 前記第1のフォーマットはラスタ画像であり、前記第2のフォーマットはベクトルマップである、請求項16に記載のデバイス。
- 前記第1のマップにおける注釈を除去し、前記第2のマップの注釈を除去するための手段をさらに備え、これは前記類似点を抽出するための前記手段の前に機能する、請求項16に記載のデバイス。
- 測位サーバによって使用される複数のマップをマージするためのデバイスであって、前記デバイスはプロセッサおよびメモリを備え、ここにおいて、前記メモリは、
第1のフォーマットにある第1のマップを受信することと、
第2のフォーマットにある第2のマップを受信することと、ここにおいて前記第1のマップと前記第2のマップとは関連するものである、
前記第1のマップをスケーリングし、回転させ、前記第2のマップに対して整合させることと、
マージされたマップを形成するために前記第1のマップと前記第2のマップの間の類似点を抽出することのための複数のソフトウェア命令を含む、デバイス。 - 前記第1のマップおよび前記第2のマップは各々内壁を備える、請求項25に記載のデバイス。
- 前記第1のマップおよび前記第2のマップは共通の建物の共通のフロアプランをカバーする屋内マップを備える、請求項25に記載のデバイス。
- 前記第1のマップおよび前記第2のマップは共通の建物の隣接するフロアプランをカバーする屋内マップを備える、請求項25に記載のデバイス。
- 前記第1のフォーマットおよび前記第2のマップは異なるフォーマットのものである、請求項25に記載のデバイス。
- 前記第1のマップおよび前記第2のマップは2つの異なるソースからのものである、請求項25に記載のデバイス。
- 測位サーバによって使用される複数のマップをマージするためにその上に記憶されたプログラムコードを含む不揮発性コンピュータ可読記憶媒体であって、
第1のフォーマットにある第1のマップを受信することと、
第2のフォーマットにある第2のマップを受信することと、ここにおいて前記第1のマップと前記第2のマップとは関連するものである、
前記第1のマップをスケーリングし、回転させ、前記第2のマップに対して整合させることと、
マージされたマップを形成するために前記第1のマップと前記第2のマップとの間の類似点を抽出することのためのプログラムコードを備える、不揮発性コンピュータ可読記憶媒体。 - 前記第1のマップおよび前記第2のマップは各々内壁を備える、請求項31に記載の不揮発性コンピュータ可読記憶媒体。
- 前記第1のマップおよび前記第2のマップは共通の建物の共通のフロアプランをカバーする屋内マップを備える、請求項31に記載の不揮発性コンピュータ可読記憶媒体。
- 前記第1のマップおよび前記第2のマップは共通の建物の隣接するフロアプランをカバーする屋内マップを備える、請求項31に記載の不揮発性コンピュータ可読記憶媒体。
- 前記第1のフォーマットおよび前記第2のマップは異なるフォーマットのものである、請求項31に記載の不揮発性コンピュータ可読記憶媒体。
- 前記第1のマップおよび前記第2のマップは2つの異なるソースからのものである、請求項31に記載の不揮発性コンピュータ可読記憶媒体。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261720308P | 2012-10-30 | 2012-10-30 | |
| US61/720,308 | 2012-10-30 | ||
| US13/679,747 | 2012-11-16 | ||
| US13/679,747 US9275282B2 (en) | 2012-10-30 | 2012-11-16 | Processing and managing multiple maps for an LCI |
| PCT/US2013/063296 WO2014070368A1 (en) | 2012-10-30 | 2013-10-03 | Processing and managing multiple maps at a location context identifier (lci) |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016502677A true JP2016502677A (ja) | 2016-01-28 |
| JP2016502677A5 JP2016502677A5 (ja) | 2016-08-04 |
Family
ID=50547267
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015539618A Pending JP2016502677A (ja) | 2012-10-30 | 2013-10-03 | ロケーション環境識別子(lci)のための複数のマップの処理および管理 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9275282B2 (ja) |
| EP (1) | EP2914930A1 (ja) |
| JP (1) | JP2016502677A (ja) |
| CN (1) | CN104755880B (ja) |
| WO (1) | WO2014070368A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021111385A (ja) * | 2019-12-30 | 2021-08-02 | ティーエムアールダブリュー ファウンデーション アイピー エスエーアールエル | 協調的3dマップデータ融合プラットフォーム及びその仮想世界システムを可能にするシステム及び方法 |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9818211B1 (en) | 2013-04-25 | 2017-11-14 | Domo, Inc. | Automated combination of multiple data visualizations |
| US20150052460A1 (en) * | 2013-08-13 | 2015-02-19 | Qualcomm Incorporated | Method for seamless mobile user experience between outdoor and indoor maps |
| US20150185017A1 (en) * | 2013-12-28 | 2015-07-02 | Gregory L. Kreider | Image-based geo-hunt |
| US20150260541A1 (en) * | 2014-03-13 | 2015-09-17 | Christopher Lacy Smith | Map content management |
| JP6689821B2 (ja) * | 2014-08-12 | 2020-04-28 | シンジェンタ パーティシペーションズ アーゲー | 硫黄含有置換基を有する殺有害生物的に活性な複素環式誘導体 |
| US10028084B2 (en) | 2015-02-10 | 2018-07-17 | Qualcomm Incorporated | Adaptive position indicator |
| US9804751B2 (en) * | 2015-07-27 | 2017-10-31 | Applied Software Technology, Inc. | Creating and merging two-dimensional floor plans within three-dimensional models |
| DE102016214868A1 (de) * | 2016-08-10 | 2018-02-15 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Erstellen oder Ergänzen einer Karte für ein Kraftfahrzeug |
| JP6939135B2 (ja) * | 2017-06-23 | 2021-09-22 | カシオ計算機株式会社 | 電子機器、プログラム、サーバ、グラフ画像生成方法およびグラフ画像生成システム |
| US20190087078A1 (en) * | 2017-09-18 | 2019-03-21 | Tyco Fire & Security Gmbh | Method and Apparatus for Mapping Devices by Using Posted Maps |
| US11687048B2 (en) | 2017-09-18 | 2023-06-27 | Johnson Controls Tyco IP Holdings LLP | Method and apparatus for evaluation of temperature sensors |
| US10735418B2 (en) | 2017-09-18 | 2020-08-04 | Johnson Controls Fire Protection LP | Method and system for service verification using access control system |
| US10681667B2 (en) | 2017-09-18 | 2020-06-09 | Johnson Controls Fire Protection LP | Method and system for service verification using WiFi signal strength mapping |
| US10755555B2 (en) | 2017-09-18 | 2020-08-25 | Johnson Controls Fire Protection LP | Method and apparatus for verifying service of installed devices using RFID |
| CN110146081A (zh) * | 2019-04-30 | 2019-08-20 | 北京云迹科技有限公司 | 用于机器人的地图数据处理方法及装置 |
| CN111009036B (zh) * | 2019-12-10 | 2023-11-21 | 北京歌尔泰克科技有限公司 | 同步定位与地图构建中栅格地图的修正方法、装置 |
| KR20210109327A (ko) * | 2020-02-27 | 2021-09-06 | 삼성전자주식회사 | 인공신경망의 학습 방법 및 장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3024087U (ja) * | 1995-10-25 | 1996-05-17 | ミサワホーム株式会社 | 住宅設計プラン集 |
| JP2002140704A (ja) * | 2000-11-01 | 2002-05-17 | Kddi Corp | コンピュータによる画像の重ね合わせ方法 |
| JP2007034145A (ja) * | 2005-07-29 | 2007-02-08 | Alps Sha:Kk | 地図重ね合わせシステムおよび方法 |
| US20120253751A1 (en) * | 2011-03-31 | 2012-10-04 | Gilles Jean Desforges | Method, tool, and device for assembling a plurality of partial floor plans into a combined floor plan |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0324087U (ja) * | 1989-07-20 | 1991-03-13 | ||
| US5761328A (en) | 1995-05-22 | 1998-06-02 | Solberg Creations, Inc. | Computer automated system and method for converting source-documents bearing alphanumeric text relating to survey measurements |
| US6556878B1 (en) | 1999-04-07 | 2003-04-29 | Randall Jon Fielding | Method and user interface for representing architectural plan diagrams |
| US6850946B1 (en) * | 1999-05-26 | 2005-02-01 | Wireless Valley Communications, Inc. | Method and system for a building database manipulator |
| AU2001293566A1 (en) | 2000-09-19 | 2002-04-02 | Draftlogic System Inc | System for client-driven automated computer-aided drafting |
| US6604126B2 (en) | 2001-04-11 | 2003-08-05 | Richard S. Neiman | Structural data presentation method |
| WO2005031077A2 (en) * | 2003-09-23 | 2005-04-07 | Miller Allan S | Multi-level apartment building |
| US7373244B2 (en) | 2004-04-20 | 2008-05-13 | Keith Kreft | Information mapping approaches |
| US8675995B2 (en) * | 2004-07-09 | 2014-03-18 | Terrago Technologies, Inc. | Precisely locating features on geospatial imagery |
| US7724242B2 (en) | 2004-08-06 | 2010-05-25 | Touchtable, Inc. | Touch driven method and apparatus to integrate and display multiple image layers forming alternate depictions of same subject matter |
| US20070136026A1 (en) * | 2005-11-28 | 2007-06-14 | Farheap Solutions Inc. | GPS-Guided Visual Display |
| US7605696B2 (en) | 2005-12-21 | 2009-10-20 | Cary Quatro | System and method for real time location tracking and communications |
| US8527542B2 (en) | 2005-12-30 | 2013-09-03 | Sap Ag | Generating contextual support requests |
| ATE462956T1 (de) | 2006-03-31 | 2010-04-15 | Research In Motion Ltd | Verfahren zur kontrolle von kartenversionen und vorrichtung zur aktualisierung der verwendung von über ein netzwerk gewarteten kartendatensätzen für mobile kommunikationsvorrichtungen |
| WO2008134607A1 (en) | 2007-04-27 | 2008-11-06 | Geocommand, Inc. | Emergency responder geographic information system |
| EP2153308B1 (en) | 2007-05-01 | 2019-02-20 | M.E.P. CAD, Inc. | Methods and apparatuses for handling a conflict in a cad drawing |
| US8773425B2 (en) | 2007-05-01 | 2014-07-08 | M.E.P. CAD Inc. | Methods and apparatuses for proposing resolutions to conflicts in a CAD drawing with reflections |
| US20090216438A1 (en) * | 2008-02-21 | 2009-08-27 | Microsoft Corporation | Facility map framework |
| US8229176B2 (en) * | 2008-07-25 | 2012-07-24 | Navteq B.V. | End user image open area maps |
| TWI374256B (en) | 2009-04-09 | 2012-10-11 | Ind Tech Res Inst | Judging method and judging system for deviation of dynamic position |
| US8812015B2 (en) | 2009-10-01 | 2014-08-19 | Qualcomm Incorporated | Mobile device locating in conjunction with localized environments |
| US9116003B2 (en) | 2009-10-01 | 2015-08-25 | Qualcomm Incorporated | Routing graphs for buildings |
| US8699759B2 (en) | 2009-10-12 | 2014-04-15 | Qualcomm Incorporated | Method and apparatus for automated determination of features on an electronic map |
| US9157745B2 (en) | 2010-01-14 | 2015-10-13 | Qualcomm Incorporated | Scalable routing for mobile station navigation with location context identifier |
| US9389085B2 (en) | 2010-01-22 | 2016-07-12 | Qualcomm Incorporated | Map handling for location based services in conjunction with localized environments |
| US8369606B2 (en) | 2010-07-21 | 2013-02-05 | Palo Alto Research Center Incorporated | System and method for aligning maps using polyline matching |
| US8706718B2 (en) * | 2010-09-10 | 2014-04-22 | Room 77, Inc. | Searching a database that stores information about individual habitable units |
| KR101732076B1 (ko) | 2010-12-22 | 2017-05-02 | 엘지전자 주식회사 | 전자 기기 및 전자 기기의 제어 방법 |
| US9069699B2 (en) * | 2011-03-29 | 2015-06-30 | Synopsys, Inc. | Identifying inconsistent constraints |
| EP2715674A2 (en) | 2011-05-23 | 2014-04-09 | Blu Homes, Inc. | Method, apparatus and system for customizing a building via a virtual environment |
| US9245065B2 (en) * | 2012-06-14 | 2016-01-26 | Here Global B.V. | Structural representation and facilitation of manipulation thereof via implicit vertex relationships |
| US20140142895A1 (en) | 2012-11-16 | 2014-05-22 | Qualcomm Incorporated | Extracting and inferring map metadata from architectural diagrams |
-
2012
- 2012-11-16 US US13/679,747 patent/US9275282B2/en not_active Expired - Fee Related
-
2013
- 2013-10-03 CN CN201380056840.3A patent/CN104755880B/zh not_active Expired - Fee Related
- 2013-10-03 WO PCT/US2013/063296 patent/WO2014070368A1/en active Application Filing
- 2013-10-03 JP JP2015539618A patent/JP2016502677A/ja active Pending
- 2013-10-03 EP EP13777419.6A patent/EP2914930A1/en not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3024087U (ja) * | 1995-10-25 | 1996-05-17 | ミサワホーム株式会社 | 住宅設計プラン集 |
| JP2002140704A (ja) * | 2000-11-01 | 2002-05-17 | Kddi Corp | コンピュータによる画像の重ね合わせ方法 |
| JP2007034145A (ja) * | 2005-07-29 | 2007-02-08 | Alps Sha:Kk | 地図重ね合わせシステムおよび方法 |
| US20120253751A1 (en) * | 2011-03-31 | 2012-10-04 | Gilles Jean Desforges | Method, tool, and device for assembling a plurality of partial floor plans into a combined floor plan |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021111385A (ja) * | 2019-12-30 | 2021-08-02 | ティーエムアールダブリュー ファウンデーション アイピー エスエーアールエル | 協調的3dマップデータ融合プラットフォーム及びその仮想世界システムを可能にするシステム及び方法 |
| JP7193163B2 (ja) | 2019-12-30 | 2022-12-20 | ティーエムアールダブリュー ファウンデーション アイピー エスエーアールエル | 協調的3dマップデータ融合プラットフォーム及びその仮想世界システムを可能にするシステム及び方法 |
| US12104916B2 (en) | 2019-12-30 | 2024-10-01 | Tmrw Foundation Ip S.Àr.L. | System and method enabling a collaborative 3D map data fusion platform and virtual world system thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2914930A1 (en) | 2015-09-09 |
| CN104755880B (zh) | 2017-12-08 |
| CN104755880A (zh) | 2015-07-01 |
| US9275282B2 (en) | 2016-03-01 |
| WO2014070368A1 (en) | 2014-05-08 |
| US20140119674A1 (en) | 2014-05-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016502677A (ja) | ロケーション環境識別子(lci)のための複数のマップの処理および管理 | |
| EP3457084B1 (en) | Methods and apparatuses for use in providing position assistance data to mobile stations | |
| JP6284906B2 (ja) | 測位補助データの移動局中心決定に関する複数の機器および方法 | |
| JP6042462B2 (ja) | 近似ロケーションに基づいた室内ロケーションコンテキスト識別子の発見方法 | |
| JP6312715B2 (ja) | モバイルデバイスを用いるナビゲーションのための方向性ビュー及びx線ビュー技法 | |
| TWI452265B (zh) | 用於連同局部化環境的基於位置的服務的地圖處置之方法、裝置、行動設備、系統及製品 | |
| KR101515728B1 (ko) | 이동국이 하나 이상의 특정한 실내 영역에 있음을 결정하는데 사용하기 위한 방법 및 장치 | |
| JP5973509B2 (ja) | ロケーションコンテキスト識別子を用いた移動局ナビゲーションのためのスケーラブルルーティング | |
| US9116003B2 (en) | Routing graphs for buildings | |
| JP5486126B2 (ja) | 無線モデルの更新 | |
| JP6081616B2 (ja) | モバイルデバイスの測位 | |
| US10921127B2 (en) | Augmented reality based electronic device to provide location tagging assistance in an indoor or outdoor area | |
| JP2018023124A (ja) | WiFiベースの屋内ポジショニングのためのマップ情報およびAP位置のマッシュアップ | |
| US20130325329A1 (en) | Geographic data update based on user input | |
| JP2016516979A (ja) | Gpsフィックス利用分布の解析によるジオフェンスの生成 | |
| JP2016048247A (ja) | ローカル・マップ及び位置特有の注釈付きデータを提供するための人間援助型の技術 | |
| JP2015513087A (ja) | 位置決定のための視覚ocr | |
| KR20120080230A (ko) | 국부화된 환경과 결합한 이동 디바이스 로케이팅 | |
| WO2022143819A1 (zh) | 一种导航二维码生成方法、园区导航方法及装置 | |
| WO2014077971A1 (en) | Extracting and inferring map metadata from architectural diagrams |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160613 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160613 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20160613 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20160816 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160823 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170404 |