JP2016158485A - 列車を所定の位置範囲に停止させるためのシステムおよび方法 - Google Patents
列車を所定の位置範囲に停止させるためのシステムおよび方法 Download PDFInfo
- Publication number
- JP2016158485A JP2016158485A JP2016021642A JP2016021642A JP2016158485A JP 2016158485 A JP2016158485 A JP 2016158485A JP 2016021642 A JP2016021642 A JP 2016021642A JP 2016021642 A JP2016021642 A JP 2016021642A JP 2016158485 A JP2016158485 A JP 2016158485A
- Authority
- JP
- Japan
- Prior art keywords
- train
- parameter
- estimate
- series
- stimulus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 27
- 239000011159 matrix material Substances 0.000 claims description 22
- 238000005457 optimization Methods 0.000 claims description 18
- 238000000354 decomposition reaction Methods 0.000 claims description 2
- 230000006870 function Effects 0.000 description 23
- 230000006399 behavior Effects 0.000 description 15
- 230000009977 dual effect Effects 0.000 description 11
- 239000013598 vector Substances 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000000638 stimulation Effects 0.000 description 3
- 230000003044 adaptive effect Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000009472 formulation Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000012887 quadratic function Methods 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000002688 persistence Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 230000017105 transposition Effects 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L3/00—Devices along the route for controlling devices on the vehicle or train, e.g. to release brake or to operate a warning signal
- B61L3/02—Devices along the route for controlling devices on the vehicle or train, e.g. to release brake or to operate a warning signal at selected places along the route, e.g. intermittent control simultaneous mechanical and electrical control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/04—Automatic systems, e.g. controlled by train; Change-over to manual control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0062—On-board target speed calculation or supervision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0072—On-board train data handling
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Feedback Control In General (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【解決手段】列車の状態を測定し取り込み、その後、パラメーター推定器において、列車の予測された状態と列車の測定された状態x206との比較に基づいて、未知のパラメーターの推定値201と、未知のパラメーターの信頼性212とを更新する。刺激入力シーケンス基準発生器が、列車の動作を取り込み、システムパラメーターの現在の推定値と、列車の測定された状態と、列車の運転に関する1組の制約とに基づいて、一連の刺激202入力を求める。モデル予測制御(MPC)装置が、制御指向コスト関数と、1組の制約と、一連の刺激入力と、未知のパラメーターの推定値と、未知のパラメーターの推定値の信頼性とを受信し、列車のトラクション−ブレーキアクチュエーター220のためのコマンド入力u211を生成する。
【選択図】図2
Description
(i)システムパラメーターの正確かつ迅速な推定
(ii)パラメーターが正確に推定される前を含む、システム制約の実現、及び
(iii)性能基準最適化
を達成する、推定及び制御を組み合わせたシステム及び方法が必要とされている。

この発明は、外乱ポリトピック線形差分包含(dpLDI:disturbed polytopic linear difference inclusion)システムと表すことができる不確定列車システムを検討する。
TASCは、列車運転に関する幾つかの制約を実施することが必要な場合がある。これらの制約は、最大速度及び最小速度並びに最大加速度及び最小加速度、アクチュエーターにおける力の範囲等を含む。特定の1組の制約がソフトランディングコーンである。
図2は、この発明の実施の形態による、パラメーター推定システム及び方法を用いる二重制御のプロセス及び構造を示す。刺激入力シーケンス基準発生器(基準発生器)205が、入力として、列車200の現在の状態x206と、列車の不確定モデル204、例えば、式(4)における行列及びベクトル(Ai,Bi,wi)と、未知のパラメーターの現在の推定値201、例えば、パラメーター推定器213によって生成される
図5に示されるように、パラメーター推定器213は、システムモデル推定値(6a)、(6b)を得るために、最新データを用いて、未知のパラメーターの現在の推定値を調整する。システム状態(206)及びコマンド入力(211)の測定から、ブロック501に関して、リグレッサーの形でシステムを記述する。
学習計画対象期間Γにわたる情報行列最小固有値の変化を通して測定される刺激の予測される持続性の観点から、入力シーケンスに起因する不確定性の減少を定量化する。
図7に示されるのは、列車のためのコマンド入力の計算である。ただし、kは時間ステップインデックスである。
Claims (13)
- 列車を所定の位置範囲に停止させるためのシステムであって、
前記列車の予測された状態と前記列車の測定された状態との比較に基づいて、未知のパラメーターのパラメーター推定値と、該未知のパラメーターの該推定値の信頼性とを更新するように構成されるパラメーター推定器と、
前記列車の動態を取り込むように構成され、システムパラメーターの現在の推定値と、前記列車の前記測定された状態と、前記列車の運転に関する1組の制約とに基づいて一連の刺激入力を求める、刺激入力シーケンス基準発生器と、
制御指向コスト関数と、1組の制約と、前記一連の刺激入力と、前記未知のパラメーターの前記推定値と、前記未知のパラメーターの前記推定値の前記信頼性とを受信し、前記列車のトラクション−ブレーキアクチュエーターのための入力コマンドを求めるように構成されるモデル予測制御装置(MPC)と、
を備える、システム。 - 前記パラメーター推定器は、前記列車の前記動態の全ての取り得る値を表す1組の既知の線形モデルの凸結合の係数である前記未知のパラメーターを推定する、請求項1に記載のシステム。
- 前記パラメーター推定器は、前記パラメーター推定値の信頼性を決定する、請求項1に記載のシステム。
- 前記パラメーター推定値の前記信頼性は、前記列車の前記測定された状態と、前記パラメーター推定値による前記列車の前記予測された状態との間の差から求められる、請求項1に記載のシステム。
- 前記未知のパラメーターの前記推定値の前記信頼性は、前記パラメーター推定値による推定誤差の予想される共分散の関数から求められる、請求項1に記載のシステム。
- 前記一連の刺激入力は、システム情報行列の指標を増加させることによって求められる、請求項1に記載のシステム。
- 前記システム情報行列の最小固有値を最大化することによって、前記一連の刺激入力を求める、請求項6に記載のシステム。
- 前記システム情報行列の前記最小固有値の前記最大化は、凸最適化問題における前記システム情報行列の階数に関する制約を課して、前記凸最適化問題を解くことによって解かれる、請求項7に記載のシステム。
- 前記刺激入力シーケンス基準発生器は、反復内側ループ外側ループ分解を用いて凸最適化問題における前記システム情報行列の階数に関する制約を課して前記凸最適化問題を解き、前記外側ループはスカラー二分探索を実行し、前記内側ループは、前記外側ループからの二分パラメーターの現在の値を用いて、一連の重み付けられた核ノルム最適化問題を解くことによって、前記システム情報行列の前記階数に関する制約を課して緩和問題を解く、請求項7に記載のシステム。
- 前記MPCは、前記パラメーター推定値と、制御指向コスト関数から構成されるコスト関数と、前記パラメーター推定値の信頼性によって重み付けされた学習指向項とを用いて前記列車の前記動態の推定値から、未来の計画対象期間に沿って制御問題を構成し、前記制御問題の解から前記入力コマンドを求める、請求項1に記載のシステム。
- 前記学習指向項は、前記一連の刺激入力の関数である、請求項10に記載のシステム。
- 前記一連の刺激の前記関数は、前記一連の刺激入力の成分と一連の前記コマンド入力の成分との間の差の二乗ノルムの和である、請求項11に記載のシステム。
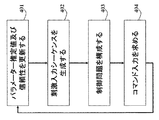
- 列車を所定の位置範囲に停止させるための方法であって、
前記列車の測定された状態を取り込むステップと、
パラメーター推定器において、前記列車の予測された状態と該列車の前記測定された状態との比較に基づいて、未知のパラメーターの推定値と、該未知のパラメーターの該推定値の信頼性とを更新するステップと、
刺激入力シーケンス基準発生器において、前記列車の動態を取り込み、システムパラメーターの現在の推定値と、前記列車の前記測定された状態と、前記列車の運転に関する1組の制約とに基づいて一連の刺激入力を求めるステップと、
モデル予測制御(MPC)において、制御指向コスト関数と、1組の制約と、前記一連の刺激入力と、前記未知のパラメーターの前記推定値と、前記未知のパラメーターの前記推定値の前記信頼性とを受信し、前記列車のトラクション−ブレーキアクチュエーターのための入力コマンドを求めるステップと、
を含む、方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/628,387 | 2015-02-23 | ||
| US14/628,387 US9499183B2 (en) | 2015-02-23 | 2015-02-23 | System and method for stopping trains using simultaneous parameter estimation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016158485A true JP2016158485A (ja) | 2016-09-01 |
| JP2016158485A5 JP2016158485A5 (ja) | 2019-01-24 |
Family
ID=56689755
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016021642A Pending JP2016158485A (ja) | 2015-02-23 | 2016-02-08 | 列車を所定の位置範囲に停止させるためのシステムおよび方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9499183B2 (ja) |
| JP (1) | JP2016158485A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018073395A (ja) * | 2016-11-01 | 2018-05-10 | 三菱電機株式会社 | マルチエージェント制御システムおよび方法 |
| JP2020128170A (ja) * | 2019-02-08 | 2020-08-27 | ナブテスコオートモーティブ株式会社 | 車両、車両の制動方法、エアブレーキシステムの制御方法、および、エアブレーキシステムの制御装置 |
| WO2023281893A1 (ja) * | 2021-07-09 | 2023-01-12 | 株式会社日立製作所 | 制御システムおよび制御方法 |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10279823B2 (en) * | 2016-08-08 | 2019-05-07 | General Electric Company | System for controlling or monitoring a vehicle system along a route |
| US10532754B2 (en) * | 2016-10-31 | 2020-01-14 | Ge Global Sourcing Llc | System for controlling or monitoring a vehicle system along a route |
| CN106707764B (zh) * | 2017-02-27 | 2019-10-22 | 华东交通大学 | 基于多级切换的动车组制动过程rbf模型参考自适应控制方法 |
| US20190057180A1 (en) * | 2017-08-18 | 2019-02-21 | International Business Machines Corporation | System and method for design optimization using augmented reality |
| CN108873691A (zh) * | 2017-11-13 | 2018-11-23 | 华东交通大学 | 高速列车广义预测调优控制方法 |
| DE102018111984A1 (de) * | 2018-05-18 | 2019-11-21 | Knorr-Bremse Systeme für Schienenfahrzeuge GmbH | Kollisionsvermeidung für ein Fahrzeug und Verfahren hierzu |
| CA3101582C (en) | 2018-06-08 | 2023-10-03 | Thales Canada Inc. | Controller, system and method for vehicle control |
| US10858017B2 (en) | 2018-07-31 | 2020-12-08 | Donglei Fan | Method of controlling vehicle to perform soft landing, and related controller and system |
| CN109835372A (zh) * | 2019-02-03 | 2019-06-04 | 湖南工业大学 | 一种铁路运输列车稳定性的主动容错控制方法 |
| US11787453B2 (en) | 2019-09-05 | 2023-10-17 | Progress Rail Services Corporation | Maintenance of distributed train control systems using machine learning |
| US20220371450A1 (en) * | 2019-10-25 | 2022-11-24 | Zf Friedrichshafen Ag | Model-Based Predictive Regulation of an Electric Machine in a Drivetrain of a Motor Vehicle |
| US20220402508A1 (en) * | 2019-11-14 | 2022-12-22 | Zf Friedrichshafen Ag | Model Predictive Control of Multiple Components of a Motor Vehicle |
| US11579575B2 (en) * | 2019-12-03 | 2023-02-14 | Baidu Usa Llc | Inverse reinforcement learning with model predictive control |
| US20210263527A1 (en) * | 2020-02-24 | 2021-08-26 | Thales Canada Inc. | Controller, control system and method for vehicle control |
| CN113442970B (zh) * | 2020-03-27 | 2022-08-09 | 比亚迪股份有限公司 | 列车跳跃控制方法、装置和列车 |
| CN113885317A (zh) * | 2020-07-02 | 2022-01-04 | 苏州艾吉威机器人有限公司 | 一种路径跟踪控制方法、系统及计算机可读存储介质 |
| CN115257882B (zh) * | 2022-07-27 | 2023-07-18 | 交控科技股份有限公司 | 列车ato精确停车方法、设备、存储介质 |
| CN116395006B (zh) * | 2023-05-15 | 2024-03-08 | 北京交通大学 | 一种面向虚拟编组列车同步进站控制方法及系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58214456A (ja) * | 1982-06-08 | 1983-12-13 | 株式会社日立製作所 | 車両自動運転装置 |
| JP2002271918A (ja) * | 2001-03-13 | 2002-09-20 | Toshiba Corp | 自動列車運転装置 |
| JP2010104084A (ja) * | 2008-10-21 | 2010-05-06 | Toshiba Corp | 列車制御装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040172175A1 (en) * | 2003-02-27 | 2004-09-02 | Julich Paul M. | System and method for dispatching by exception |
| US8332247B1 (en) * | 1997-06-12 | 2012-12-11 | G. William Bailey | Methods and systems for optimizing network travel costs |
| FR2856645B1 (fr) * | 2003-06-27 | 2005-08-26 | Alstom | Dispositif et procede de commande de trains, notamment du type ertms |
| JP5043839B2 (ja) * | 2005-07-11 | 2012-10-10 | ブルックス オートメーション インコーポレイテッド | 予知保全用インテリジェント状態監視及び障害診断システム |
| WO2008002310A1 (en) * | 2006-06-27 | 2008-01-03 | Ata Engineering, Inc. | Methods and apparatus for modal parameter estimation |
| ITTO20060735A1 (it) * | 2006-10-13 | 2008-04-14 | St Microelectronics Srl | Sistema e metodo di controllo autoadattativo di un freno elettromeccanico |
| US8131732B2 (en) * | 2008-06-03 | 2012-03-06 | Nec Laboratories America, Inc. | Recommender system with fast matrix factorization using infinite dimensions |
| US8478463B2 (en) * | 2008-09-09 | 2013-07-02 | Wabtec Holding Corp. | Train control method and system |
| US20100241296A1 (en) * | 2009-02-12 | 2010-09-23 | Ansaldo Sts Usa, Inc. | System and Method for Controlling Braking of a Train |
| JP5364530B2 (ja) * | 2009-10-09 | 2013-12-11 | 株式会社日立製作所 | 設備状態監視方法、監視システム及び監視プログラム |
| JP2013545081A (ja) * | 2010-10-08 | 2013-12-19 | ロールス−ロイス・コーポレーション | 駆動列内の故障状態を、トルク振動データを用いて検出するシステムおよび方法 |
| US9513630B2 (en) * | 2010-11-17 | 2016-12-06 | General Electric Company | Methods and systems for data communications |
| US8832000B2 (en) * | 2011-06-07 | 2014-09-09 | The Trustees Of Columbia University In The City Of New York | Systems, device, and methods for parameter optimization |
| DE102011089653A1 (de) * | 2011-12-22 | 2013-06-27 | Siemens Aktiengesellschaft | Verfahren und Anordnung zum Überwachen eines Bremssystems einer Bremsanordnung eines Schienenfahrzeugs |
| JP5926097B2 (ja) * | 2012-03-30 | 2016-05-25 | 日本信号株式会社 | 列車制御装置 |
| US8838302B2 (en) * | 2012-12-28 | 2014-09-16 | General Electric Company | System and method for asynchronously controlling a vehicle system |
| US20140358339A1 (en) * | 2013-05-31 | 2014-12-04 | General Electric Company | System And Method For Controlling De-Rating Of Propulsion-Generating Vehicles In A Vehicle System |
-
2015
- 2015-02-23 US US14/628,387 patent/US9499183B2/en active Active
-
2016
- 2016-02-08 JP JP2016021642A patent/JP2016158485A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58214456A (ja) * | 1982-06-08 | 1983-12-13 | 株式会社日立製作所 | 車両自動運転装置 |
| JP2002271918A (ja) * | 2001-03-13 | 2002-09-20 | Toshiba Corp | 自動列車運転装置 |
| JP2010104084A (ja) * | 2008-10-21 | 2010-05-06 | Toshiba Corp | 列車制御装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018073395A (ja) * | 2016-11-01 | 2018-05-10 | 三菱電機株式会社 | マルチエージェント制御システムおよび方法 |
| JP2020128170A (ja) * | 2019-02-08 | 2020-08-27 | ナブテスコオートモーティブ株式会社 | 車両、車両の制動方法、エアブレーキシステムの制御方法、および、エアブレーキシステムの制御装置 |
| JP7282538B2 (ja) | 2019-02-08 | 2023-05-29 | ナブテスコオートモーティブ株式会社 | 車両、車両の制動方法、エアブレーキシステムの制御方法、および、エアブレーキシステムの制御装置 |
| WO2023281893A1 (ja) * | 2021-07-09 | 2023-01-12 | 株式会社日立製作所 | 制御システムおよび制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9499183B2 (en) | 2016-11-22 |
| US20160244077A1 (en) | 2016-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016158485A (ja) | 列車を所定の位置範囲に停止させるためのシステムおよび方法 | |
| Liu et al. | Gaussian processes for learning and control: A tutorial with examples | |
| Wang et al. | Q-learning based fault estimation and fault tolerant iterative learning control for MIMO systems | |
| KR102228503B1 (ko) | 강화 학습을 이용한 환경 네비게이션 | |
| US20200293862A1 (en) | Training action selection neural networks using off-policy actor critic reinforcement learning | |
| Akametalu et al. | Reachability-based safe learning with Gaussian processes | |
| Sokolov et al. | Complete stability analysis of a heuristic approximate dynamic programming control design | |
| CN110471276B (zh) | 用于为物理系统创建模型函数的装置 | |
| JP2016100009A (ja) | 機械の動作を制御する方法、および機械の動作を反復的に制御する制御システム | |
| Yan et al. | Nonlinear model predictive control based on collective neurodynamic optimization | |
| CN108051999A (zh) | 基于深度强化学习的加速器束流轨道控制方法及系统 | |
| CN108427986A (zh) | 一种生产线电机故障预测方法及装置 | |
| Redder et al. | Deep reinforcement learning for scheduling in large-scale networked control systems | |
| Inga et al. | Online inverse linear-quadratic differential games applied to human behavior identification in shared control | |
| US20200333795A1 (en) | Method and apparatus for controlling movement of real object using intelligent agent trained in virtual environment | |
| CN110673619B (zh) | 一种飞行姿态的控制方法、装置、无人机和存储介质 | |
| EP4292945A1 (en) | Hybrid online policy adaptation strategy for attitude pointing performance | |
| Sehr et al. | Stochastic model predictive control: Output-feedback, duality and guaranteed performance | |
| Kamalapurkar et al. | State following (StaF) kernel functions for function approximation part II: Adaptive dynamic programming | |
| Tsiamis et al. | Predictive Linear Online Tracking for Unknown Targets | |
| Bahadorian et al. | Robust time-varying model predictive control with application to mobile robot unmanned path tracking | |
| Goedhart et al. | Machine learning for flapping wing flight control | |
| Chen et al. | Including image-based perception in disturbance observer for warehouse drones | |
| Emaletdinova et al. | Algorithms of constructing a neural network model for a dynamic object of control and adjustment of PID controller parameters | |
| Bonzanini et al. | Perception-aware model predictive control for constrained control in unknown environments |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181204 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20181204 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20181227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190528 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190725 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191029 |