JP2016015804A - 配管内部点検装置 - Google Patents
配管内部点検装置 Download PDFInfo
- Publication number
- JP2016015804A JP2016015804A JP2014135825A JP2014135825A JP2016015804A JP 2016015804 A JP2016015804 A JP 2016015804A JP 2014135825 A JP2014135825 A JP 2014135825A JP 2014135825 A JP2014135825 A JP 2014135825A JP 2016015804 A JP2016015804 A JP 2016015804A
- Authority
- JP
- Japan
- Prior art keywords
- pipe
- wheel
- internal inspection
- travel
- traveling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Landscapes
- Studio Devices (AREA)
- Electric Cable Installation (AREA)
- Installation Of Bus-Bars (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Accessories Of Cameras (AREA)
Abstract
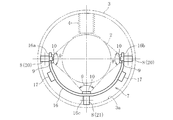
【解決手段】本発明は、内部中央に構造体2が配置された配管3内を点検する配管内部点検装置であって、配管3内を自走する走行装置7を備え、走行装置7は、配管3内を撮像する撮像装置10と、配管3の内周面3aに接触して回転する車輪8と、車輪8を回転駆動させる駆動装置9とを有し、車輪8を回転駆動させることにより、配管3の周方向へ走行し、その周方向の任意の位置で、配管3の内周面3aとの間に生じるグリップ力により姿勢を維持しつつ、配管3の長手方向に走行可能に構成された。
【選択図】図2
Description
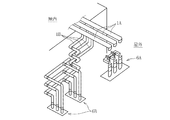
図13中、符号6Aで示すのは、発電機により生じた電力を外部の送電線へ送るために設置された主変圧器であり、符号6Bで示すのは、前記生じた電力の一部を発電所内の各種電気設備に送るために設置された所内変圧器である。発電所においては、屋内に設置された発電機(図示省略)と屋外に設置された各変圧器6A,6Bとが複数の相分離母線1A,1Bによって接続されており、発電機により生じた電力はこれらの相分離母線を介して各変圧器に送られる。
図14(a)(b)に示すように、各相分離母線1A,1Bは、導体2と、この導体2の周囲を覆うダクト(配管)3と、導体2をダクト3内の中央に支持する支持部材としての支持碍子4などで構成されている。支持碍子4は、導体2の長手方向(図14の紙面と直交する方向)に所定間隔に配置されており、H形鋼などの支持架台5に取り付けられている。
図1に示すように、本実施形態に係る配管内部点検装置は、ダクト3内を自走する走行装置7を備える。なお、図1に示すダクト3や、このダクト3内に配置される導体2及び支持碍子4の構成は、上記図13及び図14を用いて説明した構成と基本的に同様であるので、ここでは重複説明を省略する。
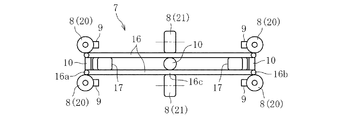
図2及び図3に示すように、本実施形態に係る走行装置7は、上記車輪8、サーボモータ9及びカメラ10を保持する本体フレーム16を有する。本体フレーム16は、ダクト3の周方向に伸びるように形成されている。本実施形態では、本体フレーム16を、ステンレス製の2本のパイプをダクト3の内周面3aに沿うように屈曲させて構成しているが、パイプに代えて板状の部材を同様に屈曲させて構成してもよい。
一般的に、メカナムホイール20は、ホイール本体18と、ホイール本体18の外周に回転可能に取り付けられた複数のローラ19とで構成されており、各ローラ19の回転軸19aは、ホイール本体18の回転軸18aに対して45°傾斜している。また、各ローラ19は、走行装置7の前後に設けられたメカナムホイール20同士、及び左右に設けられたメカナムホイール20同士で、互いに異なる向きに傾斜するように配置されている{図6(a)参照}。
一般的に、オムニホイール(登録商標)21は、ホイール本体22と、ホイール本体22の外周に回転可能に取り付けられた複数のローラ23とで構成されており、各ローラ23の回転軸23aは、ホイール本体22の回転軸22aに対して直交するように配置されている。なお、オムニホイール(登録商標)に代えて、一般的なキャスタを用いてもよい。
図6(a)に示すように、各メカナムホイール20(ホイール本体18)を前進する方向に回転させると、走行装置7は前進し、反対に、図6(b)に示すように、各メカナムホイール20を後退する方向に回転させると、走行装置7は後退する。また、図6(c)に示すように、左前と右後の各メカナムホイール20を前進する方向に回転させ、右前と左後の各メカナムホイール20を後退する方向に回転させると、走行装置7は右方向へ移動することができる。また、これとは反対に、図6(d)に示すように、左前と右後の各メカナムホイール20を後退する方向に回転させ、右前と左後の各メカナムホイール20を前進する方向に回転させると、走行装置7は左方向へ移動することができる。このように、メカナムホイール20を個別に回転駆動させることで、走行装置7をダクト3の長手方向及び周方向の全方向へ走行させる推進力を発生させることができる。
図8に示す例では、パソコン12のモニタ24の表示画面を、3つの画像表示エリアA1〜A3と、走行情報表示エリアA4と、操作パネルエリアA5の、複数の区画に分割している。
まず、作業者は、走行装置7をダクト3に設けられた出入口3b(図1参照)から内部へ挿入し、電源ケーブル11をAC電源に接続する。また、電源ケーブル11、パソコン12、走行距離測定装置15を、ハブ13に接続し、図1に示すような通信回線を構築する。
2 導体(構造体)
3 ダクト(配管)
4 支持碍子
7 走行装置
8 車輪
9 サーボモータ(駆動装置)
10 カメラ(撮像装置)
11 電源ケーブル
12 パソコン(制御装置)
13 ハブ
14 巻取装置
15 走行距離測定装置
16 本体フレーム
16a 端部
16b 端部
16c 中間部
20 メカナムホイール
24 モニタ
25 取付構造体
26 取付部材
27 可動保持部材
29 コイルバネ(付勢部材)
Claims (8)
- 内部中央に構造体が配置された配管内を点検する配管内部点検装置であって、
前記配管内を自走する走行装置を備え、
前記走行装置は、
前記配管内を撮像する撮像装置と、
前記配管の内周面に接触して回転する車輪と、
前記車輪を回転駆動させる駆動装置とを有し、
前記車輪を回転駆動させることにより、前記配管の周方向へ走行し、その周方向の任意の位置で、前記配管の内周面との間に生じるグリップ力により姿勢を維持しつつ、前記配管の長手方向に走行可能に構成されたことを特徴とする配管内部点検装置。 - 前記走行装置は、前記車輪、前記駆動装置及び前記撮像装置を保持する本体フレームを有し、
前記本体フレームは、前記配管の周方向に伸びるように形成され、前記本体フレームの長手方向の両端部に少なくとも前記車輪を配置した請求項1に記載の配管内部点検装置。 - 前記配管内に配置されたときに生じる前記本体フレームの弾性反発力により、前記車輪を前記配管の内周面に押し付けるように構成した請求項2に記載の配管内部点検装置。
- 前記本体フレームに設けられた付勢部材によって前記車輪を前記配管の内周面に押し付けるように構成した請求項2又は3に記載の配管内部点検装置。
- 前記車輪を、メカナムホイールとした請求項1から4のいずれか1項に記載の配管内部点検装置。
- 前記走行装置に、前記配管外に設置された電源から前記撮像装置及び前記駆動装置へ電力を供給する電源ケーブルを接続した請求項1から5のいずれか1項に記載の配管内部点検装置。
- 前記走行装置の走行に伴って前記配管内に進入する前記電源ケーブルの長さに基づいて、前記走行装置の走行距離を測定する走行距離測定装置を備える請求項6に記載の配管内部点検装置。
- 前記撮像装置及び前記駆動装置を遠隔操作する制御装置を備え、
前記電源ケーブルを介して前記制御装置と前記撮像装置又は前記駆動装置との間で電気信号を送受信可能に構成した請求項6又は7に記載の配管内部点検装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014135825A JP6329445B2 (ja) | 2014-07-01 | 2014-07-01 | 配管内部点検装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014135825A JP6329445B2 (ja) | 2014-07-01 | 2014-07-01 | 配管内部点検装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016015804A true JP2016015804A (ja) | 2016-01-28 |
| JP6329445B2 JP6329445B2 (ja) | 2018-05-23 |
Family
ID=55231611
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014135825A Expired - Fee Related JP6329445B2 (ja) | 2014-07-01 | 2014-07-01 | 配管内部点検装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6329445B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019507553A (ja) * | 2016-06-17 | 2019-03-14 | 武漢中儀物聯技術股▲ふん▼有限公司 | 配管ロボット、配管動画信号取得伝送装置、配管検査システム、および検査方法 |
| CN109578746A (zh) * | 2019-01-28 | 2019-04-05 | 西南大学 | 一种单体拼接式弹性管道机器人 |
| JP2020001921A (ja) * | 2018-07-02 | 2020-01-09 | 裕一 中里 | 軸状部材の送り移動装置及びその方法 |
| JP2021153354A (ja) * | 2020-03-24 | 2021-09-30 | 株式会社日立産機システム | バスダクト |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60181121U (ja) * | 1984-05-09 | 1985-12-02 | 昭和電線電纜株式会社 | 管路移動車 |
| JPS6185258A (ja) * | 1984-10-04 | 1986-04-30 | 工業技術院長 | 管内自走装置 |
| JPS6327750A (ja) * | 1986-07-21 | 1988-02-05 | Electric Power Dev Co Ltd | 管内走行装置 |
| JP3168451U (ja) * | 2010-11-10 | 2011-06-16 | 有限会社サット・システムズ | 全方向移動台車 |
-
2014
- 2014-07-01 JP JP2014135825A patent/JP6329445B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60181121U (ja) * | 1984-05-09 | 1985-12-02 | 昭和電線電纜株式会社 | 管路移動車 |
| JPS6185258A (ja) * | 1984-10-04 | 1986-04-30 | 工業技術院長 | 管内自走装置 |
| JPS6327750A (ja) * | 1986-07-21 | 1988-02-05 | Electric Power Dev Co Ltd | 管内走行装置 |
| JP3168451U (ja) * | 2010-11-10 | 2011-06-16 | 有限会社サット・システムズ | 全方向移動台車 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019507553A (ja) * | 2016-06-17 | 2019-03-14 | 武漢中儀物聯技術股▲ふん▼有限公司 | 配管ロボット、配管動画信号取得伝送装置、配管検査システム、および検査方法 |
| JP2020001921A (ja) * | 2018-07-02 | 2020-01-09 | 裕一 中里 | 軸状部材の送り移動装置及びその方法 |
| JP7121980B2 (ja) | 2018-07-02 | 2022-08-19 | 裕一 中里 | 軸状部材の送り移動装置及びその方法 |
| CN109578746A (zh) * | 2019-01-28 | 2019-04-05 | 西南大学 | 一种单体拼接式弹性管道机器人 |
| CN109578746B (zh) * | 2019-01-28 | 2024-11-22 | 西南大学 | 一种单体拼接式弹性管道机器人 |
| JP2021153354A (ja) * | 2020-03-24 | 2021-09-30 | 株式会社日立産機システム | バスダクト |
| WO2021192353A1 (ja) * | 2020-03-24 | 2021-09-30 | 株式会社日立産機システム | バスダクト |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6329445B2 (ja) | 2018-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3663747B1 (en) | Systems and methods for inspecting pipelines using a pipeline inspection robot | |
| US11887291B2 (en) | Systems and methods for inspecting pipelines using a robotic imaging system | |
| US10890505B2 (en) | Systems and methods for inspecting pipelines using a robotic imaging system | |
| JP6329445B2 (ja) | 配管内部点検装置 | |
| JP5717246B2 (ja) | 点検装置 | |
| KR101298227B1 (ko) | 관로 검사 장치 | |
| US7460980B2 (en) | Method for the control of a pipe inspection system and for the evaluation of the inspection data | |
| US20160339584A1 (en) | Robot for inspection of confined spaces | |
| KR102359154B1 (ko) | 전력설비 자율진단 로봇 | |
| CN111412342A (zh) | 管道检测机器人及管道检测方法 | |
| CN115954800B (zh) | 电缆检测安装系统及利用其实现电缆敷设安装的方法 | |
| US8706340B2 (en) | Underground utility vault inspection system and method | |
| CN113826312B (zh) | 检查车辆 | |
| EP3798622B1 (en) | Systems and methods for inspecting pipelines using a robotic imaging system | |
| JPH0868622A (ja) | 煙突筒身検査システム | |
| BR102015026049A2 (pt) | equipamento robótico de inspeção | |
| JP2017099036A (ja) | 送電線異常箇所撮影装置 | |
| JP3164700U (ja) | 管路検査装置 | |
| CN113984891A (zh) | 一种水利pccp管声光纤声纹监测机器人及其控制方法 | |
| JP3163271U (ja) | 管内検査装置 | |
| JPH039009Y2 (ja) | ||
| JPH03212610A (ja) | 走行検査装置 | |
| TR2021020855A2 (tr) | Boru i̇çi̇ panorami̇k muayene si̇stemi̇ | |
| JP5503948B2 (ja) | 作業ナビゲーションシステム | |
| JP2003014652A (ja) | 管路内観察用ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170530 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180307 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180328 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180420 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6329445 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |