JP2015192570A - 電動フォークリフトおよびその走行用モータ駆動装置 - Google Patents
電動フォークリフトおよびその走行用モータ駆動装置 Download PDFInfo
- Publication number
- JP2015192570A JP2015192570A JP2014070071A JP2014070071A JP2015192570A JP 2015192570 A JP2015192570 A JP 2015192570A JP 2014070071 A JP2014070071 A JP 2014070071A JP 2014070071 A JP2014070071 A JP 2014070071A JP 2015192570 A JP2015192570 A JP 2015192570A
- Authority
- JP
- Japan
- Prior art keywords
- speed
- motor
- command value
- electric forklift
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims description 20
- 230000009977 dual effect Effects 0.000 abstract description 13
- 230000014509 gene expression Effects 0.000 description 14
- 230000004048 modification Effects 0.000 description 8
- 238000012986 modification Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 6
- 230000003028 elevating effect Effects 0.000 description 4
- 239000000470 constituent Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
Images




Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】デュアルモータ式の電動フォークリフトの省エネ化、および/または、タイヤの摩耗の防止にある。【解決手段】左駆動輪610Lと右駆動輪610Rは、独立した走行モータによって駆動される。左右の走行モータを駆動するモータ駆動装置は、電動フォークリフトの目標速度を示す速度指令値Vrefにもとづいて、左右の駆動輪の速度を制御する速度分配部を備える。速度分配部は、転舵角δrと、左右の転舵輪612L、612Rの軸の延長線の交点Oの座標の関係を、左速度指令値Vlrefおよび右速度指令値Vrrefに反映させる。【選択図】図6
Description
本発明は、電動フォークリフトの走行用モータ駆動装置に関する。
産業車両のひとつに、電池やコンデンサなどの蓄電デバイスを動力源とする電動フォークリフトがある。電動フォークリフト(以下単にフォークリフトとも称する)は、走行用車輪(駆動輪)である前輪に動力を伝達する走行モータと、転舵輪である後輪の転舵角(操舵角、トレイル角ともいう)を制御する油圧ポンプに動力を伝達する油圧アクチュエータ用モータ(ステアリングアシストモータ)と、昇降体を制御する油圧ポンプに動力を伝達する油圧アクチュエータ用モータ(荷役モータ)と、走行モータ、ステアリングアシストモータ、荷役モータそれぞれを駆動する電力変換装置を備える。
電動フォークリフトは、(1)単一の走行用モータからディファレンシャルギアを介して左右駆動輪に動力を伝達するシングルモータ式と、(2)右駆動輪と左駆動輪それぞれに独立したモータが設けられ、それぞれの回転速度、回転方向が独立に制御可能なデュアルモータ式に分類される。
デュアルモータ式では、転舵角に応じて、左右の駆動輪の回転速度が制御される。
すなわちアクセルの踏み込み量に応じた速度指令値が生成される。そして、転舵輪の転舵角に応じて、右駆動輪と左駆動輪の速度配分が行われ、左右の駆動輪に対する速度指令値が生成される。そして、右駆動輪の速度指令値と、現在の右駆動輪の速度に応じたフィードバック制御(PI制御)によって、右駆動輪のトルク指令値が生成される。同様に、右駆動輪の速度指令値と、現在の左駆動輪の速度に応じたフィードバック制御によって、左駆動輪のトルク指令値が生成される。
すなわちアクセルの踏み込み量に応じた速度指令値が生成される。そして、転舵輪の転舵角に応じて、右駆動輪と左駆動輪の速度配分が行われ、左右の駆動輪に対する速度指令値が生成される。そして、右駆動輪の速度指令値と、現在の右駆動輪の速度に応じたフィードバック制御(PI制御)によって、右駆動輪のトルク指令値が生成される。同様に、右駆動輪の速度指令値と、現在の左駆動輪の速度に応じたフィードバック制御によって、左駆動輪のトルク指令値が生成される。
右駆動輪と左駆動輪の速度配分に関して、直進時には、左右の駆動輪の回転数は実質的に等しくなる。左旋回時には右駆動輪の回転速度が高くなり、右旋回時には左駆動輪の回転速度が高くなり、転舵角の絶対値が大きいほど左右の回転速度差は大きくなる。
転舵輪が車体中央に1個設けられる車両における速度分配については特許文献1に開示される。この場合、転舵輪の軸の延長線と駆動輪の軸の延長線の交点を回転中心として、左右の駆動輪それぞれの回転速度指令を幾何学的に求めることができる。
左右の転舵輪がアッカーマンリンク機構により連結される車両における速度分配については、特許文献2に開示される。特許文献2においても基本的な考え方は特許文献1と同じであり、左右一方の転舵輪の軸の延長線と駆動輪の軸(走行軸)の延長線の交点を回転中心として、左右の駆動輪それぞれの回転速度指令を幾何学的に求めている。
本発明者らは、アッカーマンリンク機構を有するフォークリフトの速度制御について検討した結果、以下の課題を認識するに至った。
特許文献2に開示される速度分配は、アッカーマンリンク機構が理想的であるとの前提にもとづいており、具体的には、左の転舵輪の軸の延長線と右の操舵輪の軸の延長線の交点が、駆動輪の軸の延長線上を移動することを前提としている。
特許文献2に開示される速度分配は、アッカーマンリンク機構が理想的であるとの前提にもとづいており、具体的には、左の転舵輪の軸の延長線と右の操舵輪の軸の延長線の交点が、駆動輪の軸の延長線上を移動することを前提としている。
しかしながら現実的には、アッカーマンリンク機構では、転舵角によっては、実際の回転中心の位置が走行軸上から逸脱する。かかる状況において、理想的なジオメトリにもとづいて定められた演算式を用いて左右の速度指令値を演算すると、タイヤが踏ん張ったり引きずられたりする。これは、省エネの観点から好ましくなく、またタイヤの摩耗を早める要因となりうる。一般車両では、転舵角の範囲がそれほど大きくないため、こうした問題が顕在化することは稀であるが、フォークリフトでは一般車両と比べて、転舵角の範囲が大きいため、こうした問題が顕著となる。
なお、かかる課題を当業者の一般的な技術認識としてとらえてはならず、本発明者らが独自に認識したものである。
本発明は係る課題に鑑みてなされたものであり、そのある態様の例示的な目的のひとつは、デュアルモータ式の電動フォークリフトの省エネ化、および/または、タイヤの摩耗の防止にある。
本発明のある態様は、デュアルモータ式の電動フォークリフトに搭載され、電動フォークリフトの目標速度を示す速度指令値にもとづいて左走行モータおよび右走行モータを駆動する電動フォークリフト用モータ駆動装置に関する。電動フォークリフトは、左駆動輪、右駆動輪、左駆動輪を駆動する左走行モータ、右駆動輪を駆動する右走行モータ、アッカーマンリンク機構により連結された左右の転舵輪を備える。モータ駆動装置は、ユーザの操作に応じた速度指令値と、フォークリフトの転舵輪の転舵角にもとづき、左走行モータの速度を指示する左速度指令値と右走行モータの速度を指示する右速度指令値を計算する速度分配部を備える。速度分配部は、転舵角と左右の転舵輪の軸の延長線の交点の座標の関係を、左速度指令値および右速度指令値に反映させる。
本発明の別の態様もまた、電動フォークリフト用モータ駆動装置である。モータ駆動装置は、ユーザの操作に応じた速度指令値と、フォークリフトの転舵輪の転舵角にもとづき、左走行モータの速度を指示する左速度指令値と右走行モータの速度を指示する右速度指令値を計算する速度分配部を備える。速度分配部は、左右の転舵輪の軸の延長線の交点から左右の駆動輪の軸の延長線へおろした垂線の足の座標を回転中心として、左速度指令値および右速度指令値を演算する。
これらの態様によると、アッカーマンリンク機構により得られる実際の回転中心にもとづいて、左右の駆動輪の速度を計算できる。これにより、タイヤの踏ん張りや引きずりが防止、抑制され、ひいてはデュアルモータ式の電動フォークリフトの省エネ化を実現でき、および/または、タイヤの摩耗を防止できる。
速度分配部は、転舵角δと、垂線の足と旋回外側の転舵輪の軸を結ぶ直線と左右の駆動輪の軸の延長線がなす角度δ’との関係式δ=f(δ’)を保持していてもよい。
速度分配部は、転舵角δと、左右の転舵輪の軸の延長線の交点と左右の駆動輪の軸の延長線との距離lとを関係づける関数l=g(δ)を保持してもよい。
速度分配部は、転舵角δと、左右の転舵輪の軸の延長線の交点の左右軸の座標yとを関係づける関数y=h(δ)を保持してもよい。
ある態様のモータ駆動装置は、左速度指令値と左走行モータの現在の速度の誤差に応じて、左走行モータのトルクを指示する左トルク指令値を生成するとともに、右速度指令値と右走行モータの現在の速度の誤差に応じて、右走行モータのトルクを指示する右トルク指令値を生成するトルク指令値生成部と、左トルク指令値および右トルク指令値それぞれにもとづいて、左走行モータおよび右走行モータをそれぞれ駆動するインバータと、をさらに備えてもよい。
本発明の別の態様はデュアルモータ式の電動フォークリフトに関する。電動フォークリフトは、左駆動輪と、右駆動輪と、左駆動輪を駆動する左走行モータと、右駆動輪を駆動する右走行モータと、アッカーマンリンク機構により連結された左右の転舵輪と、左走行モータおよび右走行モータを駆動するモータ駆動装置と、を備える。
なお、以上の構成要素の任意の組み合わせや本発明の構成要素や表現を、方法、装置、システムなどの間で相互に置換したものもまた、本発明の態様として有効である。
本発明によれば、デュアルモータ式の電動フォークリフトの省エネ化を実現でき、および/または、タイヤの摩耗を防止できる。
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。また、実施の形態は、発明を限定するものではなく例示であって、実施の形態に記述されるすべての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。
本明細書において、「部材Aが、部材Bと接続された状態」とは、部材Aと部材Bが物理的に直接的に接続される場合のほか、部材Aと部材Bが、それらの電気的な接続状態に実質的な影響を及ぼさない、あるいはそれらの結合により奏される機能や効果を損なわせない、その他の部材を介して間接的に接続される場合も含む。
同様に、「部材Cが、部材Aと部材Bの間に設けられた状態」とは、部材Aと部材C、あるいは部材Bと部材Cが直接的に接続される場合のほか、それらの電気的な接続状態に実質的な影響を及ぼさない、あるいはそれらの結合により奏される機能や効果を損なわせない、その他の部材を介して間接的に接続される場合も含む。
同様に、「部材Cが、部材Aと部材Bの間に設けられた状態」とは、部材Aと部材C、あるいは部材Bと部材Cが直接的に接続される場合のほか、それらの電気的な接続状態に実質的な影響を及ぼさない、あるいはそれらの結合により奏される機能や効果を損なわせない、その他の部材を介して間接的に接続される場合も含む。
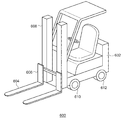
図1は、フォークリフトの外観図を示す斜視図である。フォークリフト600は、車体(シャーシ)602、フォーク604、昇降体(リフト)606、マスト608、車輪610、612を備える。マスト608は車体602の前方に設けられる。昇降体606は、油圧アクチュエータ(図1に不図示、図3の116)などの動力源によって駆動され、マスト608に沿って昇降する。昇降体606には、荷物を支持するためのフォーク604が取り付けられている。
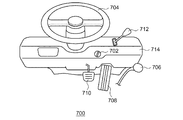
図2は、フォークリフトの操縦パネル700の一例を示す図である。操縦パネル700は、イグニッションスイッチ702、ステアリングホイール704、リフトレバー706、アクセルペダル708、ブレーキペダル710、ダッシュボード714、前後進レバー712を備える。
イグニッションスイッチ702は、フォークリフト600の起動用のスイッチである。ステアリングホイール704は、フォークリフト600の操舵を行うための操作手段である。リフトレバー706は、昇降体606を上下に移動させるための操作手段である。アクセルペダル708は、走行用の車輪の回転を制御する操作手段であり、ユーザが踏み込み量を調節することでフォークリフト600の走行が制御される。ユーザがブレーキペダル710を踏み込むと、ブレーキがかかる。前後進レバー712は、フォークリフト600の走行方向を、前進と後進で切りかえるためのレバーである。そのほか、図示しないインチングペダルが設けられてもよい。
続いて、フォークリフト600の構成を、走行、荷役、操舵それぞれについて説明する。図3は、デュアルモータ式のフォークリフト600の電気系統、機械系統の構成を示すブロック図である。ECU(電子制御コントローラ)110は、フォークリフト600全体を制御するためのプロセッサである。
電池106は、P線およびN線の間に、電池電圧VBATを出力する。
走行モータ駆動装置200、荷役モータ駆動装置300、ステアリングアシスト用モータ駆動装置400は、電力変換装置100を構成する。電力変換装置100は、ECU110からの第1制御指令値S1〜第3制御指令値S3にもとづき、走行モータM1L、M1R、荷役モータM2、ステアリングアシストモータM3それぞれを駆動する。走行モータ駆動装置200、荷役モータ駆動装置300、ステアリングアシスト用モータ駆動装置400はそれぞれ、電池電圧VBATを受け、対応するモータM1L、M1R、M2、M3に供給する。
走行モータ駆動装置200、荷役モータ駆動装置300、ステアリングアシスト用モータ駆動装置400は、電力変換装置100を構成する。電力変換装置100は、ECU110からの第1制御指令値S1〜第3制御指令値S3にもとづき、走行モータM1L、M1R、荷役モータM2、ステアリングアシストモータM3それぞれを駆動する。走行モータ駆動装置200、荷役モータ駆動装置300、ステアリングアシスト用モータ駆動装置400はそれぞれ、電池電圧VBATを受け、対応するモータM1L、M1R、M2、M3に供給する。
(走行)
ECU110は、前後進レバー712からの前進、後進を指示する信号と、アクセルペダル708からの、踏み込み量に応じた走行操作量を示す信号を受け、それに応じた第1制御指令値S1を走行モータ駆動装置200に出力する。走行モータ駆動装置200は、第1制御指令値S1に応じて左走行モータM1L、右走行モータM1Rそれぞれに供給する電力を制御する。第1制御指令値S1は、走行モータM1の目標速度を指示する速度指令値と相関を有する。駆動輪である左前輪(左駆動輪)610Lは、左走行モータM1Lの動力により回転し、右前輪(右駆動輪)610Rは、右走行モータM1Rの動力により回転する。
ECU110は、前後進レバー712からの前進、後進を指示する信号と、アクセルペダル708からの、踏み込み量に応じた走行操作量を示す信号を受け、それに応じた第1制御指令値S1を走行モータ駆動装置200に出力する。走行モータ駆動装置200は、第1制御指令値S1に応じて左走行モータM1L、右走行モータM1Rそれぞれに供給する電力を制御する。第1制御指令値S1は、走行モータM1の目標速度を指示する速度指令値と相関を有する。駆動輪である左前輪(左駆動輪)610Lは、左走行モータM1Lの動力により回転し、右前輪(右駆動輪)610Rは、右走行モータM1Rの動力により回転する。
(荷役)
リフトレバー706の傾きによって、昇降体606の上下動が制御される。ECU110は、リフトレバー706の傾きを検出し、傾きに応じた荷役操作量を示す第2制御指令値S2を荷役モータ駆動装置300に出力する。荷役モータ駆動装置300は、第2制御指令値S2に応じた電力を荷役モータM2に供給し、その回転を制御する。昇降体606は、油圧アクチュエータ116と連結される。油圧アクチュエータ116は、荷役モータM2が生成する回転運動を、直線運動に変換し、昇降体606を制御する。
リフトレバー706の傾きによって、昇降体606の上下動が制御される。ECU110は、リフトレバー706の傾きを検出し、傾きに応じた荷役操作量を示す第2制御指令値S2を荷役モータ駆動装置300に出力する。荷役モータ駆動装置300は、第2制御指令値S2に応じた電力を荷役モータM2に供給し、その回転を制御する。昇降体606は、油圧アクチュエータ116と連結される。油圧アクチュエータ116は、荷役モータM2が生成する回転運動を、直線運動に変換し、昇降体606を制御する。
(操舵)
エンコーダ122は、ステアリングホイール704の回転角を検出し、回転角を示す信号をECU110に出力する。ECU110は、回転角に応じた第3制御指令値S3をステアリングアシスト用モータ駆動装置400に出力する。たとえば第3制御指令値S3は、ステアリングホイール704の回転速度に比例する。ステアリングアシスト用モータ駆動装置400は、第3制御指令値S3に応じた電力をステアリングアシストモータM3に供給し、その回転数を制御する。転舵輪である左右の後輪612は、アッカーマンリンク機構126を介してギアボックス124と連結される。ステアリングアシストモータM3の回転運動は、油圧アクチュエータ118およびギアボックス124を介して、アッカーマンリンク機構126に伝達され、操舵が制御される。
エンコーダ122は、ステアリングホイール704の回転角を検出し、回転角を示す信号をECU110に出力する。ECU110は、回転角に応じた第3制御指令値S3をステアリングアシスト用モータ駆動装置400に出力する。たとえば第3制御指令値S3は、ステアリングホイール704の回転速度に比例する。ステアリングアシスト用モータ駆動装置400は、第3制御指令値S3に応じた電力をステアリングアシストモータM3に供給し、その回転数を制御する。転舵輪である左右の後輪612は、アッカーマンリンク機構126を介してギアボックス124と連結される。ステアリングアシストモータM3の回転運動は、油圧アクチュエータ118およびギアボックス124を介して、アッカーマンリンク機構126に伝達され、操舵が制御される。
図4(a)、(b)は、デュアルモータ式のフォークリフト600を模式的に示す図である。Lはホイールベース、Trfは前トレッド、Trrは後トレッド、nl(rpm)は左駆動輪610Lの回転速度を、nr(rpm)は右駆動輪610Rの回転速度を、Vl(m/s)は左駆動輪610Lの速度を、Vr(m/s)は右駆動輪610Rの速度を示す。
転舵輪である後輪612L、612Rは、アッカーマンリンク機構によって転舵角δrが可変となっている。
後輪612L、612Rそれぞれの車軸の交点が、車体の回転中心Oとなり、回転中心Oは、理想的なアッカーマンリンク機構では、前輪610L、610Rの軸上を左右に移動する。本実施の形態では、転舵角δrを右後輪の回転角として定義しているが、当業者には、転舵角δrの定義がそれには限定されないことが理解される。転舵角δrは、図4(a)に示す左旋回時に正、図4(b)に示す右旋回時に負をとるものとする。
ρxは、回転中心Oと、前輪610L、610Rの中点の距離である。
後輪612L、612Rそれぞれの車軸の交点が、車体の回転中心Oとなり、回転中心Oは、理想的なアッカーマンリンク機構では、前輪610L、610Rの軸上を左右に移動する。本実施の形態では、転舵角δrを右後輪の回転角として定義しているが、当業者には、転舵角δrの定義がそれには限定されないことが理解される。転舵角δrは、図4(a)に示す左旋回時に正、図4(b)に示す右旋回時に負をとるものとする。
ρxは、回転中心Oと、前輪610L、610Rの中点の距離である。
このフォークリフト600のステアリング機構は、回転中心Oが、前輪610L、610Rの間に移動することを許容する。この場合、左右の駆動輪610L、610Rは逆回転するよう制御される。
図5は、実施の形態に係る走行モータ駆動装置200の構成を示すブロック図である。走行モータ駆動装置200は、速度分配部201、トルク指令値生成部202、トルクリミット部208、インバータ210、速度センサ220、転舵角センサ222を備える。
転舵角センサ222は、図4に示す転舵角δrを検出する。速度センサ220は、左走行モータM1L、右走行モータM1Rそれぞれの速度nl(Vl)、nr(Vr)を検出する。
速度分配部201は、アクセルの操作量に応じた速度指令値Vrefを受ける。速度分配部201は、現在の転舵角δrに応じて、左走行モータM1Lの目標速度である左速度指令値Vlrefと、右走行モータM1Rの目標速度である右速度指令値Vrrefを計算する。
トルク指令値生成部202は、左速度指令値Vlrefと左走行モータM1Lの現在の速度nlの誤差に応じて、左走行モータM1Lのトルクを指示する左トルク指令値Tlcomを生成する。同様に、右速度指令値Vrrefと右走行モータM1Rの現在の速度Vrの誤差に応じて、右走行モータM1Rのトルクを指示する右トルク指令値Trcomを生成する。
トルク指令値生成部202は、左速度指令値Vlrefと左走行モータM1Lの現在の速度Vlの誤差を生成する減算器204Lと、誤差をPI(比例、積分)制御し、左トルク指令値Vrrefを生成するPI制御部206Lを含む。右輪についても同様である。
トルク指令値生成部202は、左速度指令値Vlrefと左走行モータM1Lの現在の速度Vlの誤差を生成する減算器204Lと、誤差をPI(比例、積分)制御し、左トルク指令値Vrrefを生成するPI制御部206Lを含む。右輪についても同様である。
トルクリミット部208には、トルク指令値Tlcom,Trcomの上限値Tlimを規定するトルクリミットカーブTlim(n)がモータの速度nの関数として定義されている。
トルクリミット部208は、左トルク指令値Tlcomを、現在の左走行モータM1Lの速度nrおよびトルクリミットカーブTlim(n)に応じて定まる上限値Tllim以下に制限する。同様に、トルクリミット部208は、右トルク指令値Trcomを、現在の右走行モータM1Rの速度nrおよびトルクリミットカーブTlim(n)に応じて定まる上限値Trlim以下に制限する。トルクリミットカーブTlim(n)は、テーブルとして保持されてもよいし、近似式として保持されてもよい。
トルクリミット部208は、左トルク指令値Tlcomを、現在の左走行モータM1Lの速度nrおよびトルクリミットカーブTlim(n)に応じて定まる上限値Tllim以下に制限する。同様に、トルクリミット部208は、右トルク指令値Trcomを、現在の右走行モータM1Rの速度nrおよびトルクリミットカーブTlim(n)に応じて定まる上限値Trlim以下に制限する。トルクリミットカーブTlim(n)は、テーブルとして保持されてもよいし、近似式として保持されてもよい。
以上が走行モータ駆動装置200の全体構成である。続いて速度分配部201における速度分配について詳細に説明する。
図6は、速度分配部201の速度分配を説明する図である。
速度分配部201は、センサにより得られる転舵角δrと、左右の転舵輪612L、612Rの軸の延長線の交点Oの座標の関係、言い換えれば交点Oの軌道132に関する情報を保持しており、軌道132を左速度指令値Vrrefおよび右速度指令値Vlrefに反映させる。
図6は、速度分配部201の速度分配を説明する図である。
速度分配部201は、センサにより得られる転舵角δrと、左右の転舵輪612L、612Rの軸の延長線の交点Oの座標の関係、言い換えれば交点Oの軌道132に関する情報を保持しており、軌道132を左速度指令値Vrrefおよび右速度指令値Vlrefに反映させる。
また速度分配部201は、左右の転舵輪612L、612Rの軸の延長線の交点Oから、左右の駆動輪610L、610Rの軸の延長線(走行軸)130へおろした垂線の足の座標O’を回転中心として、左速度指令値Vlrefおよび右速度指令値Vrrefを演算する。
なお図6に示される座標O”は、アッカーマンリンク機構126が理想的であるものとしたときに回転中心として扱われる座標として参考に示したものであり、図4の座標Oに相当する。
以下、速度分配部201による速度分配について、直進時、左旋回時、右旋回時それぞれについて説明する。
座標Oから走行軸130への垂線の足、すなわち回転中心O’と旋回外側の転舵輪612の軸を結ぶ直線134と、左右の駆動輪の走行軸130の延長線がなす角度をδr’とする。またO’と車体中心のy座標の距離をρxとする。前後軸をx方向、左右軸をy方向にとる。
座標Oから走行軸130への垂線の足、すなわち回転中心O’と旋回外側の転舵輪612の軸を結ぶ直線134と、左右の駆動輪の走行軸130の延長線がなす角度をδr’とする。またO’と車体中心のy座標の距離をρxとする。前後軸をx方向、左右軸をy方向にとる。
1. δr=0 (直進)
Vlref=Vrref=Vref
Vlref=Vrref=Vref
2. δr>0 (左旋回)
Vrref=Vref
Vlref=(ρx−Trf/2)/(ρx+Trf/2)×Vref …(1)
ただし、ρx=L/tan(δr’)−Trr/2である。
Vrref=Vref
Vlref=(ρx−Trf/2)/(ρx+Trf/2)×Vref …(1)
ただし、ρx=L/tan(δr’)−Trr/2である。
3. δr<0 (右旋回)
Vrref=(ρx−Trf/2)/(ρx+Trf/2)×Vref …(2)
Vrref=Vref
ただし、δr’≠−π/2のとき、ρx=−L/tan(δr’)+Trr/2であり、δr’=−π/2のとき、ρx=Trr/2である。
Vrref=(ρx−Trf/2)/(ρx+Trf/2)×Vref …(2)
Vrref=Vref
ただし、δr’≠−π/2のとき、ρx=−L/tan(δr’)+Trr/2であり、δr’=−π/2のとき、ρx=Trr/2である。
本実施の形態において速度分配部201は、転舵角δrと、左右の転舵輪612L、612Rの軸の延長線の交点Oと左右の駆動輪の軸の延長線(走行軸)130との距離lとを関係づける関数l=g(δr)を保持する。この関数g(δr)は、アッカーマンリンク機構126の設計情報から事前に求めることができ、あるいは実際のアッカーマンリンク機構126を測定することにより事前に求めることができる。関数g(δr)は、テーブルの形式で保持されても良いし、近似式として保持されてもよい。
O’−O”の距離をΔy、座標O”と、後輪612Rのリンクの中心136のY軸方向の距離をy”とすると式(3)、(4)を得る。
y”=L/tanδr …(3)
Δy=g(δr)/tanδr …(4)
y”=L/tanδr …(3)
Δy=g(δr)/tanδr …(4)
y”、Δyを用いると、式(5)を得る。
tanδr’=L/(y”−Δy) …(5)
式(3)、(4)を、式(5)に代入すると、式(6)を得る。
tanδr’=L/{L/tanδr−g(δr)/tanδr}
=L/(L−g(δr))×tanδr …(6)
tanδr’=L/(y”−Δy) …(5)
式(3)、(4)を、式(5)に代入すると、式(6)を得る。
tanδr’=L/{L/tanδr−g(δr)/tanδr}
=L/(L−g(δr))×tanδr …(6)
式(6)から明らかなように、転舵角δrと、左右の転舵輪612L、612Rの軸の延長線の交点Oと左右の駆動輪の軸の延長線(走行軸)130との距離lとを関係づける関数l=g(δr)を保持することは、tanδr’とtanδrとを対応づける関数g’()を保持することと把握できる。
ただし、g’(x)=L/(L−g(δr))×xである。
ただし、g’(x)=L/(L−g(δr))×xである。
さらに言えば、速度分配部201は、転舵角δrと、角度δr’とを関係づける関数δ=f(δr’)を保持しているとも把握できる。
速度分配部201は、式(6)のtanδr’を利用して、式(1)、(2)を演算することにより、速度分配を行う。
以上が走行モータ駆動装置200の構成である。
この走行モータ駆動装置200によれば、アッカーマンリンク機構126により得られる実際の回転中心O’にもとづいて、左右の駆動輪の速度を計算できる。これにより、タイヤの踏ん張りや引きずりが防止、抑制され、ひいてはデュアルモータ式の電動フォークリフトの省エネ化を実現でき、および/または、タイヤの摩耗を防止できる。
この走行モータ駆動装置200によれば、アッカーマンリンク機構126により得られる実際の回転中心O’にもとづいて、左右の駆動輪の速度を計算できる。これにより、タイヤの踏ん張りや引きずりが防止、抑制され、ひいてはデュアルモータ式の電動フォークリフトの省エネ化を実現でき、および/または、タイヤの摩耗を防止できる。
以上、本発明について、実施の形態をもとに説明した。この実施の形態は例示であり、それらの各構成要素や各処理プロセスの組み合わせにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。以下、こうした変形例について説明する。
(第1変形例)
実施の形態では、速度分配部201は、転舵角δrと、左右の転舵輪612L、612Rの軸の延長線の交点Oと左右の駆動輪の軸の延長線(走行軸)130との距離lとを関係づける関数l=g(δr)を保持する場合を説明したが、本発明はそれには限定されない。
実施の形態では、速度分配部201は、転舵角δrと、左右の転舵輪612L、612Rの軸の延長線の交点Oと左右の駆動輪の軸の延長線(走行軸)130との距離lとを関係づける関数l=g(δr)を保持する場合を説明したが、本発明はそれには限定されない。
第1変形例において速度分配部201は、転舵角δrと、左右の転舵輪612L、612Rの軸の延長線の交点O’の左右軸の座標yとを関係づける関数y=h(δr)を保持してもよい。この場合、式(7)を得る。
tanδr’=L/y=L/h(δr) …(7)
速度分配部201は、式(7)のtanδr’を利用して、式(1)、(2)を演算することにより、速度分配を行う。
tanδr’=L/y=L/h(δr) …(7)
速度分配部201は、式(7)のtanδr’を利用して、式(1)、(2)を演算することにより、速度分配を行う。
(第2変形例)
実施の形態では、右後輪の転舵角δrにもとづいて速度分配を行う場合を説明したが本発明はそれには限定されない。たとえば右転舵輪612Rの転舵角δrに加えて、左転舵輪612Lの転舵角δlを検出するようにし、左旋回時にはδrにもとづいて、右旋回時にはδlを用いて、速度分配を行ってもよい。
実施の形態では、右後輪の転舵角δrにもとづいて速度分配を行う場合を説明したが本発明はそれには限定されない。たとえば右転舵輪612Rの転舵角δrに加えて、左転舵輪612Lの転舵角δlを検出するようにし、左旋回時にはδrにもとづいて、右旋回時にはδlを用いて、速度分配を行ってもよい。
(第3変形例)
また実施の形態では、旋回時外側の駆動輪の速度指令値Vorefを、アクセルの操作量に応じた速度指令値Vrefと等しくしたが本発明はそれには限定されない。
たとえば、旋回時内側の駆動輪の速度指令値Virefを、速度指令値Vrefとしてもよい。
Viref=Vref
Voref=(ρx+Trf/2)/(ρx−Trf/2)×Vref
また実施の形態では、旋回時外側の駆動輪の速度指令値Vorefを、アクセルの操作量に応じた速度指令値Vrefと等しくしたが本発明はそれには限定されない。
たとえば、旋回時内側の駆動輪の速度指令値Virefを、速度指令値Vrefとしてもよい。
Viref=Vref
Voref=(ρx+Trf/2)/(ρx−Trf/2)×Vref
あるいは、左右の駆動輪の平均速度を、アクセルの操作量に応じた速度指令値Vrefと等しくしてもよい。
Voref=(ρx+Trf/2)/ρx×Vref
Viref=(ρx−Trf/2)/ρx×Vref
Voref=(ρx+Trf/2)/ρx×Vref
Viref=(ρx−Trf/2)/ρx×Vref
実施の形態にもとづき、具体的な語句を用いて本発明を説明したが、実施の形態は、本発明の原理、応用を示しているにすぎず、実施の形態には、請求の範囲に規定された本発明の思想を逸脱しない範囲において、多くの変形例や配置の変更が認められる。
600…フォークリフト、602…車体、604…フォーク、606…昇降体、608…マスト、610…前輪、612…後輪、106…電池、100…電力変換装置、200…走行モータ駆動装置、300…荷役モータ駆動装置、400…ステアリングアシスト用モータ駆動装置、110…ECU、116,118…油圧アクチュエータ、120…ステアリングシャフト、122…エンコーダ、124…ギアボックス、126…アッカーマンリンク機構、130…走行軸、201…速度分配部、202…トルク指令値生成部、204…減算器、206…PI制御部、208…トルクリミット部、210…インバータ、220…速度センサ、222…転舵角センサ、M1…走行モータ、M1L…左走行モータ、M1R…右走行モータ、M2…荷役モータ、M3…ステアリングアシストモータ、300…モータ駆動装置、610L…左駆動輪、610R…右駆動輪、700…操縦パネル、702…イグニッションスイッチ、704…ステアリングホイール、706…リフトレバー、708…アクセルペダル、710…ブレーキペダル、712…前後進レバー、714…ダッシュボード。
Claims (7)
- 左駆動輪、右駆動輪、前記左駆動輪を駆動する左走行モータ、前記右駆動輪を駆動する右走行モータ、アッカーマンリンク機構により連結された左右の転舵輪を備える電動フォークリフトに搭載され、前記電動フォークリフトの目標速度を示す速度指令値にもとづいて前記電動フォークリフトの前記左走行モータおよび前記右走行モータを駆動する電動フォークリフト用モータ駆動装置であって、
ユーザの操作に応じた速度指令値と、前記電動フォークリフトの転舵輪の転舵角にもとづき、前記左走行モータの速度を指示する左速度指令値と前記右走行モータの速度を指示する右速度指令値を計算する速度分配部を備え、
前記速度分配部は、前記左右の転舵輪の軸の延長線の交点から前記左右の駆動輪の軸の延長線へおろした垂線の足の座標を回転中心として、前記左速度指令値および前記右速度指令値を演算することを特徴とする電動フォークリフト用モータ駆動装置。 - 前記速度分配部は、前記転舵角δと、前記垂線の足と旋回外側の転舵輪の軸を結ぶ直線と前記左右の駆動輪の軸の延長線がなす角度δ’とを関係づける関数δ=f(δ’)を保持していることを特徴とする請求項1に記載の電動フォークリフト用モータ駆動装置。
- 前記速度分配部は、前記転舵角δと、前記左右の転舵輪の軸の延長線の交点と前記左右の駆動輪の軸の延長線との距離lとを関係づける関数l=g(δ)を保持することを特徴とする請求項1または2に記載の電動フォークリフト用モータ駆動装置。
- 前記速度分配部は、前記転舵角δと、前記左右の転舵輪の軸の延長線の交点の左右軸の座標yとを関係づける関数y=h(δ)を保持することを特徴とする請求項1または2に記載の電動フォークリフト用モータ駆動装置。
- 左駆動輪、右駆動輪、前記左駆動輪を駆動する左走行モータ、前記右駆動輪を駆動する右走行モータ、アッカーマンリンク機構により連結された左右の転舵輪を備える電動フォークリフトに搭載され、前記電動フォークリフトの目標速度を示す速度指令値にもとづいて前記電動フォークリフトの前記左走行モータおよび前記右走行モータを駆動する電動フォークリフト用モータ駆動装置であって、
ユーザの操作に応じた速度指令値と、前記電動フォークリフトの転舵輪の転舵角にもとづき、前記左走行モータの速度を指示する左速度指令値と前記右走行モータの速度を指示する右速度指令値を計算する速度分配部を備え、
前記速度分配部は、前記転舵角と前記左右の転舵輪の軸の延長線の交点の座標の関係を、前記左速度指令値および前記右速度指令値に反映させることを特徴とする電動フォークリフト用モータ駆動装置。 - 前記左速度指令値と前記左走行モータの現在の速度の誤差に応じて、前記左走行モータのトルクを指示する左トルク指令値を生成するとともに、前記右速度指令値と前記右走行モータの現在の速度の誤差に応じて、前記右走行モータのトルクを指示する右トルク指令値を生成するトルク指令値生成部と、
前記左トルク指令値および前記右トルク指令値それぞれにもとづいて、前記左走行モータおよび前記右走行モータをそれぞれ駆動するインバータと、
をさらに備えることを特徴とする請求項1から5のいずれかに記載の電動フォークリフト用モータ駆動装置。 - 左駆動輪および右駆動輪と、
前記左駆動輪および前記右駆動輪それぞれに動力を伝達する左走行モータおよび右走行モータと、
アッカーマンリンク機構により連結された左右の転舵輪と、
前記左走行モータおよび前記右走行モータを駆動する請求項1から6のいずれかに記載の電動フォークリフト用モータ駆動装置と、
を備えることを特徴とする電動フォークリフト。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014070071A JP2015192570A (ja) | 2014-03-28 | 2014-03-28 | 電動フォークリフトおよびその走行用モータ駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014070071A JP2015192570A (ja) | 2014-03-28 | 2014-03-28 | 電動フォークリフトおよびその走行用モータ駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015192570A true JP2015192570A (ja) | 2015-11-02 |
Family
ID=54426680
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014070071A Pending JP2015192570A (ja) | 2014-03-28 | 2014-03-28 | 電動フォークリフトおよびその走行用モータ駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015192570A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110979022A (zh) * | 2019-11-12 | 2020-04-10 | 珠海格力电器股份有限公司 | 一种电动汽车电子差速的控制方法、系统及电动汽车 |
| CN112606904A (zh) * | 2020-12-29 | 2021-04-06 | 无锡蓝海华腾技术有限公司 | 一种新能源汽车差速转向控制方法及系统 |
-
2014
- 2014-03-28 JP JP2014070071A patent/JP2015192570A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110979022A (zh) * | 2019-11-12 | 2020-04-10 | 珠海格力电器股份有限公司 | 一种电动汽车电子差速的控制方法、系统及电动汽车 |
| CN112606904A (zh) * | 2020-12-29 | 2021-04-06 | 无锡蓝海华腾技术有限公司 | 一种新能源汽车差速转向控制方法及系统 |
| CN112606904B (zh) * | 2020-12-29 | 2022-05-03 | 无锡蓝海华腾技术有限公司 | 一种新能源汽车差速转向控制方法及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4062085B2 (ja) | 電気式産業車両の操舵装置 | |
| JP6367305B2 (ja) | フォークリフト | |
| JP6282082B2 (ja) | フォークリフト用のモータ駆動装置およびそれを用いた電動フォークリフト | |
| JP6338393B2 (ja) | 電動フォークリフト | |
| JP5550891B2 (ja) | 電動車両の制御装置および制御方法 | |
| JP6282108B2 (ja) | 電動フォークリフト用モータ駆動装置およびそれを用いたフォークリフト | |
| WO2013080886A1 (ja) | 自動車 | |
| CN104097682B (zh) | 车辆用转向操作装置 | |
| JP5936306B2 (ja) | 電気自動車 | |
| US9771078B2 (en) | Haulage vehicle | |
| JP6699592B2 (ja) | 無人フォークリフトの操舵制御方法 | |
| JP7188449B2 (ja) | 産業車両 | |
| JP2014113013A (ja) | フォークリフト用のモータ駆動装置およびそれを用いた電動フォークリフト | |
| JP2015192570A (ja) | 電動フォークリフトおよびその走行用モータ駆動装置 | |
| JP2014128117A (ja) | 電動フォークリフト用のモータ駆動装置およびそれを用いた電動フォークリフト | |
| JP6193264B2 (ja) | 電動フォークリフト用のモータ駆動装置およびそれを用いた電動フォークリフト | |
| JP2013251986A (ja) | フォークリフト用のモータ駆動装置およびそれを用いたフォークリフト | |
| JP5992237B2 (ja) | 転舵アシスト制御装置 | |
| JP2014103815A (ja) | フォークリフト用のモータ駆動装置およびそれを用いた電動フォークリフト | |
| JP6414678B2 (ja) | 車両用操舵装置 | |
| JP5833180B2 (ja) | 電動車両の制御装置 | |
| JP6237444B2 (ja) | 産業車両 | |
| JP2014113012A (ja) | フォークリフト用のモータ駆動装置およびそれを用いた電動フォークリフト | |
| JP5791554B2 (ja) | フォークリフトの走行モータ用の電力変換装置およびそれを用いたフォークリフト | |
| JP2018134970A (ja) | リーン機構を備える車両 |