JP2015156900A - 電気掃除機 - Google Patents
電気掃除機 Download PDFInfo
- Publication number
- JP2015156900A JP2015156900A JP2014032116A JP2014032116A JP2015156900A JP 2015156900 A JP2015156900 A JP 2015156900A JP 2014032116 A JP2014032116 A JP 2014032116A JP 2014032116 A JP2014032116 A JP 2014032116A JP 2015156900 A JP2015156900 A JP 2015156900A
- Authority
- JP
- Japan
- Prior art keywords
- main body
- unit
- hand
- control unit
- electric blower
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Electric Vacuum Cleaner (AREA)
Abstract
Description
Claims (3)
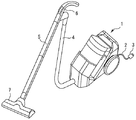
- 吸引風を発生させる電動送風機と、前記電動送風機を制御する本体制御部とを有する本体部と、
後端が前記本体部に接続され、前記吸引風により前記本体部に吸引されるごみが通過するホースと、
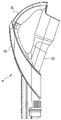
前記ホースの前端に設けられ、使用者が把持する把持部を有する手元操作部と、
前記ホースをつたうように配置され、前記本体部と前記手元操作部に接続された通信配線とを備え、
前記手元操作部は、
前記手元操作部の動作を検出する加速度センサと、
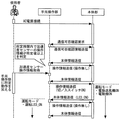
前記加速度センサの出力を入力し、前記通信配線を介して前記本体制御部と通信信号をやり取りする手元制御部とを有し、
前記本体制御部は、前記加速度センサが検出した前記手元操作部の動作に応じて前記電動送風機を制御することを特徴とする電気掃除機。 - 前記手元操作部は、使用者が動作指示を入力するスイッチ部を有し、
前記手元制御部は、前記スイッチ部の出力を入力し、
前記本体制御部は、前記スイッチ部の出力に応じて前記電動送風機を制御し、
前記把持部は、第1の把持部と、前記第1の把持部よりも前記スイッチ部から遠くに配置された第2の把持部とを有し、
前記使用者は、前記第1の把持部を把持している手で前記スイッチ部を操作できるが、前記第2の把持部を把持している手で前記スイッチ部を操作できないことを特徴とする請求項1に記載の電気掃除機。 - 吸引風を発生させる電動送風機と、
複数の運転モードから1つを選択して前記電動送風機を制御する本体制御部と、
掃除動作を行っていることを検出する加速度センサと、
前記加速度センサが掃除動作を行っていると検出している時間において最も使用頻度の高い動作モードを記憶する記憶部とを備え、
前記本体制御部は、運転停止後の再運転時に前記記憶部に記憶された前記運転モードで前記電動送風機を制御することを特徴とする電気掃除機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014032116A JP2015156900A (ja) | 2014-02-21 | 2014-02-21 | 電気掃除機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014032116A JP2015156900A (ja) | 2014-02-21 | 2014-02-21 | 電気掃除機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015156900A true JP2015156900A (ja) | 2015-09-03 |
| JP2015156900A5 JP2015156900A5 (ja) | 2016-08-12 |
Family
ID=54181462
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014032116A Pending JP2015156900A (ja) | 2014-02-21 | 2014-02-21 | 電気掃除機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015156900A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2596860A (en) * | 2020-07-10 | 2022-01-12 | Dyson Technology Ltd | Vacuum cleaner |
| JP2022540232A (ja) * | 2019-07-11 | 2022-09-14 | シャークニンジャ オペレーティング エルエルシー | スマートノズルおよびスマートノズルを実装する表面クリーニング装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06335443A (ja) * | 1993-05-31 | 1994-12-06 | Tokyo Electric Co Ltd | 電気掃除機 |
| JP2009050604A (ja) * | 2007-08-29 | 2009-03-12 | Sharp Corp | 電気掃除機 |
| JP2010115360A (ja) * | 2008-11-13 | 2010-05-27 | Toshiba Corp | 電気掃除機 |
| JP2011045653A (ja) * | 2009-08-28 | 2011-03-10 | Toshiba Corp | 電気掃除機 |
| JP2012210300A (ja) * | 2011-03-31 | 2012-11-01 | Hitachi Appliances Inc | 電気掃除機用手元ハンドル部 |
| JP2013183965A (ja) * | 2012-03-09 | 2013-09-19 | Mitsubishi Electric Corp | 電気掃除機 |
-
2014
- 2014-02-21 JP JP2014032116A patent/JP2015156900A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06335443A (ja) * | 1993-05-31 | 1994-12-06 | Tokyo Electric Co Ltd | 電気掃除機 |
| JP2009050604A (ja) * | 2007-08-29 | 2009-03-12 | Sharp Corp | 電気掃除機 |
| JP2010115360A (ja) * | 2008-11-13 | 2010-05-27 | Toshiba Corp | 電気掃除機 |
| JP2011045653A (ja) * | 2009-08-28 | 2011-03-10 | Toshiba Corp | 電気掃除機 |
| JP2012210300A (ja) * | 2011-03-31 | 2012-11-01 | Hitachi Appliances Inc | 電気掃除機用手元ハンドル部 |
| JP2013183965A (ja) * | 2012-03-09 | 2013-09-19 | Mitsubishi Electric Corp | 電気掃除機 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022540232A (ja) * | 2019-07-11 | 2022-09-14 | シャークニンジャ オペレーティング エルエルシー | スマートノズルおよびスマートノズルを実装する表面クリーニング装置 |
| GB2596860A (en) * | 2020-07-10 | 2022-01-12 | Dyson Technology Ltd | Vacuum cleaner |
| WO2022008869A1 (en) * | 2020-07-10 | 2022-01-13 | Dyson Technology Limited | Vacuum cleaner |
| GB2596860B (en) * | 2020-07-10 | 2023-01-04 | Dyson Technology Ltd | Vacuum cleaner |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3384820B1 (en) | Vacuum cleaner and handle for a cleaner | |
| EP3473151B1 (en) | Vacuum cleaner and handle thereof | |
| JP6237376B2 (ja) | 掃除システム | |
| JP2011030668A (ja) | 電気掃除機 | |
| JP2015156900A (ja) | 電気掃除機 | |
| JP2011229728A (ja) | 電気掃除機 | |
| JP2015165835A (ja) | 電気掃除機 | |
| JP2012055462A (ja) | 電気掃除機 | |
| JP2015156900A5 (ja) | ||
| JP2013233198A (ja) | 電気掃除機 | |
| JP2015154850A (ja) | 電気掃除機 | |
| KR102292252B1 (ko) | 청소기 | |
| JP6071223B2 (ja) | 電気掃除機 | |
| JP6142817B2 (ja) | 電気掃除機 | |
| JP6711089B2 (ja) | 電気掃除機 | |
| KR20170021113A (ko) | 코드리스 분리형 청소기 | |
| KR101985525B1 (ko) | 청소기 | |
| KR102454763B1 (ko) | 청소기 | |
| JP6405703B2 (ja) | 電気掃除機 | |
| JP2013223562A (ja) | 電気掃除機 | |
| KR102369187B1 (ko) | 진공 청소기 및 그의 제어방법 | |
| JP7467885B2 (ja) | 電気掃除機 | |
| JP2011139773A (ja) | 電気掃除機 | |
| JP6405702B2 (ja) | 電気掃除機 | |
| JP6311403B2 (ja) | 電気掃除機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160627 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160627 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170509 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20171121 |