JP2015114143A - 移動体の速度・角度計測装置 - Google Patents
移動体の速度・角度計測装置 Download PDFInfo
- Publication number
- JP2015114143A JP2015114143A JP2013254770A JP2013254770A JP2015114143A JP 2015114143 A JP2015114143 A JP 2015114143A JP 2013254770 A JP2013254770 A JP 2013254770A JP 2013254770 A JP2013254770 A JP 2013254770A JP 2015114143 A JP2015114143 A JP 2015114143A
- Authority
- JP
- Japan
- Prior art keywords
- moving body
- speed
- angle
- antenna
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000005259 measurement Methods 0.000 title abstract description 5
- 230000005855 radiation Effects 0.000 claims abstract description 12
- 239000004065 semiconductor Substances 0.000 claims abstract description 7
- 230000007704 transition Effects 0.000 claims abstract description 7
- 230000005540 biological transmission Effects 0.000 claims description 24
- 238000013500 data storage Methods 0.000 claims description 19
- 238000000034 method Methods 0.000 claims description 17
- 238000001514 detection method Methods 0.000 claims description 8
- 238000010586 diagram Methods 0.000 description 4
- 238000011326 mechanical measurement Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
- G01S13/424—Stacked beam radar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/03—Details of HF subsystems specially adapted therefor, e.g. common to transmitter and receiver
- G01S7/034—Duplexers
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
【課題】機械的な駆動機構を使用せずに電波の輻射方向を高速に変化して移動体の速度と移動方向の角度を計測できる移動体の速度・角度計測装置を提供する。
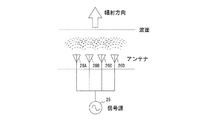
【解決手段】指向性の異なる複数のアンテナ18-1〜18-Nを備え、反射波の信号強度の時間推移に基づいて信号強度が最も大きくなる方向を移動体の移動方向として検出する。これにより、従来に比べて移動体の真の速度に近い速度を検出することができると共に移動体の移動方向を検出することができる。また、各アンテナ18-1〜18-Nと送受信部15との接続切り替えを半導体素子からなる切替器16によって行う。これにより、従来例のような複雑な回転機構或いは複数の移相器や分配/合成器を用いなくてすむので、高速切り替え駆動が可能になるとともに複雑な接続回路が不要になり、コストを低減することができる。
【選択図】図1
【解決手段】指向性の異なる複数のアンテナ18-1〜18-Nを備え、反射波の信号強度の時間推移に基づいて信号強度が最も大きくなる方向を移動体の移動方向として検出する。これにより、従来に比べて移動体の真の速度に近い速度を検出することができると共に移動体の移動方向を検出することができる。また、各アンテナ18-1〜18-Nと送受信部15との接続切り替えを半導体素子からなる切替器16によって行う。これにより、従来例のような複雑な回転機構或いは複数の移相器や分配/合成器を用いなくてすむので、高速切り替え駆動が可能になるとともに複雑な接続回路が不要になり、コストを低減することができる。
【選択図】図1
Description
本発明は、ゴルフボールなどのように空間を移動する移動体の速度及び角度を計測する計測装置に関するものである。
従来、ゴルフボールや野球ボールなどのように空間を移動する移動体或いは走行車両の速度を計測する計測装置としてスピードガンや自動速度取締機(ORBIS)などの名称の計測装置が知られている。
このような計測装置としては、例えば図3に示すものが知られている、図3に示す計測装置20は、操作部23からの入力指示に基づいて、MCU(マイクロコンピュータ)21によって演算処理及び送受信タイミングの切り替えが行われ、送受信回路25によって例えば24GHz帯の電波を指向性を有するアンテナ26から輻射し、移動体1からの反射波を受信し、送信電波の周波数と受信電波の周波数を検出して、送受信周波数の変化からドップラー法を用いて移動体の速度を計測するものである。計測された移動体1の速度は表示回路22の表示器に表示される。また、MCU21には電源22から駆動電力が供給される。
しかし、この場合、計測できる移動体1の速度は、電波の輻射方向の速度であり、図3においては移動体1の真の速度Vではなく、電波の輻射方向の速度Vcosθである。すなわち、移動体1の真の速度をV、アンテナ26から移動体に向けて輻射される電波の周波数をf0、ドップラー周波数をfd、電波速度をcとすると、受信電波の周波数はf0+fdであり、電波輻射方向の移動体の速度は、Vcosθ=cfd/2f0で求められる。このようにドップラー法を用いて移動体1の速度を計測する装置の一例として特開2002−71802号公報(特許文献1)に開示される装置が知られている。
移動体の真の速度を計測する方法として、移動体の進む方向と同一方向に電波を輻射できるようにする方法が知られている。その1つ目として機械式、2つ目として位相式が知られている。
図4に示す機械式の計測装置30では、回転機構31によって指向性を有するアンテナ26を回転させながら電波の輻射方向を変えて送信と受信を行い、計測した移動体1の速度が最も速くなる方向が移動体1の移動方向であり、このときの速度が真の速度であるとする。
しかし、機械式の計測装置30では、高速にアンテナ26を回転駆動するための回転機構31及びアンテナ26からの輻射方向をMCU21によって検出する手段を必要とする。このため、複雑な回転機構を必要とするためコスト高になるとともに高速駆動にも限界がある。
図5に示す位相式の計測装置40では、複数の分配/合成器41a〜41cと複数のアンテナ26a〜26c毎に設けた移相器42a〜42dを備え、各アンテナ26a〜26dから輻射される電波の位相を変えることによって、図6及び図7に示すように電波の輻射方向を変化させながら、電波の送信と受信を行い、計測した移動体1の速度が最も速くなる方向が移動体1の移動方向であり、このときの速度が真の速度であるとする。
このように位相式の計測装置は、機械的な駆動機構を設ける必要がないので、高速に電波の輻射方向を変化させることができる。
しかしながら、位相式の計測装置40では、複数の分配/合成器41a〜41cと移相器42a〜42dを直列接続するため、送受信回路25とアンテナ26a〜26dとの間を伝搬する信号の減衰が大きくなる。さらに、複数の分配/合成器41a〜41cと移相器42a〜42dの接続回路が複雑になるとともにコスト高になるという問題点があった。
本発明の目的は上記の問題点に鑑み、機械的な駆動機構を使用せずに電波の輻射方向を高速に変化して移動体の速度と移動方向の角度を計測できる移動体の速度・角度計測装置を提供することである。
本発明は上記の目的を達成するために、指向性を有するアンテナに所定周波数の高周波信号を供給し、該アンテナから前記周波数の電波を移動体に向けて輻射し、前記移動体からの反射波を前記アンテナによって受信し、前記反射波の高周波信号の周波数を検出してドップラー法を用いて前記移動体の速度を計測する移動体の速度・角度計測装置であって、電波の輻射方向が異なるように設定された複数の前記指向性を有するアンテナと、制御信号に基づいて前記輻射波となる高周波信号を送信する送信手段と、前記反射波の高周波信号を受信する受信手段と、前記送信手段の高周波信号出力端子及び前記受信手段の高周波信号入力端子と前記複数のアンテナの給電端子との接続を前記制御信号に基づいて切り替える半導体素子からなる切替器と、データ記憶手段と、基準方向に対する前記各アンテナの指向性の方向のデータが記憶されているアンテナ方向データ記憶手段と、前記制御信号による前記切替器の切替タイミングに基づいて、前記電波をアンテナから輻射した直後に前記移動体によって反射され該アンテナに入射した反射波の高周波信号を前記受信手段から入力し、該高周波信号の信号強度と前記移動体の速度を求め、該求めた信号強度と速度のデータを対応させて一時記憶手段に記憶させる検出値取得手段と、前記切替タイミングの所定回数毎に、前記アンテナ方向データ記憶手段に記憶されているデータ及び前記一時記憶手段に記憶されている信号強度データを用いて前記所定回数内における前記信号強度の時間推移に基づいて信号強度が最も大きくなる方向を前記基準方向に対する前記移動体の移動方向として該移動体の移動方向の角度と該角度に対応する移動体の速度を求めて前記データ記憶手段に記憶する検出結果取得手段とを備えていることを特徴とする移動体の速度・角度計測装置を提案する。
本発明の移動体の速度・角度計測装置によれば、送信手段及び受信手段は制御信号に基づいて切替器によって各アンテナに順次接続が切り替えられる。また、制御信号による切替器の切替タイミングに基づいて、電波をアンテナから輻射した直後に移動体によって反射され該アンテナに入射した反射波の高周波信号を受信手段から入力し、移動体の速度が求められ、該求められた速度のデータが一時記憶手段に記憶される。さらに、切替タイミングの所定回数毎に、アンテナ方向データ記憶手段に記憶されているデータ及び前記一時記憶手段に記憶されている速度データに基づいて前記所定回数内における信号強度の時間推移に基づいて信号強度が最も大きくなる方向を基準方向に対する移動体の移動方向として該移動体の移動方向の角度と該角度に対応する移動体の速度が求められてデータ記憶手段に記憶される。
本発明の移動体の速度・角度計測装置によれば、指向性の異なる複数のアンテナを備え、反射波の信号強度の時間推移に基づいて信号強度が最も大きくなる方向を移動体の移動方向として検出しているので、従来に比べて移動体の真の速度に近い速度を検出することができると共に移動体の移動方向を検出することができる。また、各アンテナと送受信手段との接続切り替えを半導体素子からなる切替器によって行っているため、従来例のような複雑な回転機構或いは複数の移相器や分配/合成器を用いなくてすむので、高速切り替え駆動が可能になるとともに複雑な接続回路が不要になり、コストを低減することができる。
次に、本発明の一実施形態を図面を参照して説明する。
本実施形態では、本発明の一具体例として、ゴルフ場においてショットしたゴルフボールを移動体としてゴルフボールの速度と移動方向の角度を計測する装置として説明する。
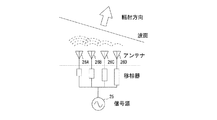
図1に示すように、本実施形態の移動体の速度・角度計測装置(以下、本装置と称する)10は、MCU(マイクロコンピュータ)11、電源部12、操作部13、表示部14、送受信部15、信号切替器16、記憶部17、N個(Nは自然数)のアンテナ18-1〜18-Nを備えている。
MCU11は電源部12から供給される電力によって動作し、操作部13から入力される指示に基づいて動作する。また、MCU11は、操作部13を介して入力された指示に基づいて信号切替器15を切替ながら送受信部15による送信と受信を制御する。さらに、MCU11は、送受信部15によってアンテナ18-1〜18-Nから輻射した電波の周波数と、アンテナ18-1〜18-Nを介して送受信部15より入力した高周波信号の周波数(移動体1からの反射波の周波数)とに基づいてドップラー法を用いて移動体1の速度と移動体1の移動方向の角度を求めて記憶部17に記憶すると共に表示部14に表示する。
操作部13はスイッチ或いはタッチパネルなどを有し、操作者がMCU11に対して指示を入力できるようにする。
表示部14はMCU11からの表示指示に基づいて移動体1の速度と角度を表示する。
送受信部15はMCU11からの指示に基づいて24GHz帯の周波数f1の高周波信号を信号切替器16を介してアンテナ18-1〜18-Nに供給すると共に、アンテナ18-1〜18-Nによって受信した高周波信号を受信し、送信した高周波信号の周波数f1と受信した高周波信号の周波数f2の値からドップラー法によって移動体1の速度を算出し、算出した速度の値と受信した高周波信号の強度の値をデジタルデータとしてMCU11に送出する。
信号切替器16は、MESFET(Metal-Semiconductor Field Effect Transistor)或いはMEMS(Micro Electro Mechanical Systems)等の半導体素子からなり、MCU11から入力した制御信号CSに基づいてアンテナ18-1〜18-Nの中の何れか1つと送受信部15とを接続する。
記憶部17は、書き換え可能な不揮発性ROMや磁気ディスク装置などからなり、一時記憶領域と、アンテナ指向性情報記憶領域と、速度等データ記憶領域を備えている。一時記憶領域はMCU11によって一時的にデータが格納される領域であり、速度等データ記憶領域はMCU11によって求められた速度データと角度データが記憶される。また、アンテナ指向性データ記憶領域には、基準方向の角度を0度としたときの各アンテナの指向性方向の角度データが予め記憶されている。
アンテナ18-1〜18-Nのそれぞれは指向性を有するアンテナであり、それぞれの指向性方向が異なる方向となるように装置10の直方体形状の筐体の一面或いは平面状のアンテナ固定基板の一面などに固定されている。また、本実施形態では、アンテナ18-1〜18-Nが固定されている面に対して直角な方向に基準方向が設定されており、基準方向が水平面内に位置するように装置10を設置したときにアンテナ18-1〜18-Nの指向性方向が水平面内の角度と垂直面内の角度の双方或いは何れか一方をもつように複数のアンテナ18-1〜18-Nが設けられている。
次に、本装置10の詳細な動作を図2のフローチャートを参照して説明する。
ショットする際のゴルフボール(移動体1)の速度と角度を本装置10を用いて計測する際に、操作者はゴルフボールが飛んで行く方向を考慮して本装置10の基準方向を設定して本装置10を固定した後、本装置10を駆動させる。ここで、上記のようにアンテナ18-1〜18-Nが同一面上に固定され、ゴルフボールが飛んで行く方向を考慮して本装置10の基準方向が設定されると、飛んでいくゴルフボールから各アンテナ18-1〜18-Nまでの距離がほぼ等しくなるので、計測される信号強度の誤差を低減することができる。
操作者によって本装置10の駆動が開始されると、MCU11はタイマー計時を開始し(SA1)、変数iを1に設定する(SA2)。
次いで、MCU11は信号切替器16へ制御信号CSを出力して送受信部15をi番目のアンテナ18-iに接続する(SA3)とともに、送受信部15に対して送信命令を出力する(SA4)。これにより、送受信部15から高周波信号が所定時間だけアンテナ18-iに供給され、アンテナ18-iから電波が輻射される。
また、送受信部15からアンテナ18-iに高周波信号が供給された後、送受信部15は受信状態として待機し、アンテナ18-iを介して移動体1からの反射波の高周波信号を入力したときに、この高周波信号の信号強度を検出するとともに、送信した高周波信号の周波数f1と受信した高周波信号の周波数f2からドップラー法を用いて移動体1の速度を算出し、信号強度の値と速度の値のデジタルデータをMCU11に出力する。
送受信部15から信号強度の値と速度の値のデジタルデータを入力(SA5)したMCU11は、これらのデータを記憶部17の一時記憶領域に記憶(SA6)した後、変数iに1を加算し(SA7)、変数iが(N+1)に等しいか否かを判定する(SA8)。この判定の結果、変数iが(N+1)に等しく無いときは前記SA3の処理に移行しする。また、変数iが(N+1)に等しいときは、MCU11は、データ記憶部17の一時記憶領域に格納されている信号強度の値と速度の値を読み出し、これらのデータと周知のビームフォーマー法を用いて基準方向に対するゴルフボールの移動方向の角度及びそのときの速度を求め(SA9)、求めた角度と速度のデータを対応づけてデータ記憶部17の速度等データ記憶領域に格納するとともに一時記憶領域に格納されているデータを消去する(SA10)。
次に、MCU11はタイマーの計時時間が時間T1を経過したが否かを判定し(SA11)、時間T1を経過していないときは前記SA2の処理に移行する。また、タイマーの計時時間が時間T1を経過したときは、MCU11は速度等データ記憶領域に格納されている速度データの中で最も大きい速度データとこれに対応する角度データを表示部14の表示器に表示するとともに速度等データ記憶領域に格納されているデータを消去する(SA12)。この後、前記SA1の処理に移行する。
なお、本実施形態では信号切替器16をns(1×10-9秒)単位で切り替えられるようすると共に操作部13を介して操作者が切り替え間隔時間を変えられるようにしている。このように切り替え間隔時間を変えられることにより、移動体1の種類によって移動体の速度が異なっても適切にアンテナを切り替えることができる。たとえば、ゴルフボールに代えて野球ボールやソフトボールなど速度及び角度を計測する際に、それぞれのボールの速さが異なるので、速さにあったアンテナ切り替え間隔時間を設定することができる。これにより、移動体の種類が変わり移動速度が変わっても、的確に速度と角度を計測することができる。
以上説明したように、本実施形態の移動体の速度・角度計測装置10によれば、指向性の異なる複数のアンテナ18-1〜18-Nを備え、反射波の信号強度の時間推移に基づいて信号強度が最も大きくなる方向を移動体の移動方向として検出しているので、従来に比べて移動体の真の速度に近い速度を検出することができると共に移動体の移動方向を検出することができる。また、各アンテナ18-1〜18-Nと送受信部15との接続切り替えを半導体素子からなる切替器16によって行っているため、従来例のような複雑な回転機構或いは複数の移相器や分配/合成器を用いなくてすむので、高速切り替え駆動が可能になるとともに複雑な接続回路が不要になり、コストを低減することができる。
なお、本実施形態では時間T1を例えば10msに設定しているが、移動体の種類や速さに応じて適宜設定することが好ましい。
また、本実施形態ではビームフォーマー法を用いて移動体の角度を計測しているが、一時記憶領域に記憶されているデータの中で信号強度の値が最も大きいときの速度と角度を移動体の速度と角度としてもよい。
本発明は、機械的な駆動機構を使用せずに電波の輻射方向を高速に変化して移動体の速度と移動方向の角度を計測できる移動体の速度・角度計測装置に関するものである。
1…移動体、10…移動体の速度・角度計測装置、11…MCU、12…電源部、13…操作部、14…表示部、15…送受信部、16…信号切替器、17…記憶部、18-1〜18-N…アンテナ。
Claims (8)
- 指向性を有するアンテナに所定周波数の高周波信号を供給し、該アンテナから前記周波数の電波を移動体に向けて輻射し、前記移動体からの反射波を前記アンテナによって受信し、前記反射波の高周波信号の周波数を検出してドップラー法を用いて前記移動体の速度を計測する移動体の速度・角度計測装置であって、
電波の輻射方向が異なるように設定された複数の前記指向性を有するアンテナと、
制御信号に基づいて前記輻射波となる高周波信号を送信する送信手段と、
前記反射波の高周波信号を受信する受信手段と、
前記送信手段の高周波信号出力端子及び前記受信手段の高周波信号入力端子と前記複数のアンテナの給電端子との接続を前記制御信号に基づいて切り替える半導体素子からなる切替器と、
データ記憶手段と、
基準方向に対する前記各アンテナの指向性の方向のデータが記憶されているアンテナ方向データ記憶手段と、
前記制御信号による前記切替器の切替タイミングに基づいて、前記電波をアンテナから輻射した直後に前記移動体によって反射され該アンテナに入射した反射波の高周波信号を前記受信手段から入力し、該高周波信号の信号強度と前記移動体の速度を求め、該求めた信号強度と速度のデータを対応させて一時記憶手段に記憶させる検出値取得手段と、
前記切替タイミングの所定回数毎に、前記アンテナ方向データ記憶手段に記憶されているデータ及び前記一時記憶手段に記憶されている信号強度データを用いて前記所定回数内における前記信号強度の時間推移に基づいて信号強度が最も大きくなる方向を前記基準方向に対する前記移動体の移動方向として該移動体の移動方向の角度と該角度に対応する移動体の速度を求めて前記データ記憶手段に記憶する検出結果取得手段とを備えている
ことを特徴とする移動体の速度・角度計測装置。 - 前記検出結果取得手段は、求めた速度が最も大きくなるアンテナの指向性方向を前記移動体の移動方向とし、該指向性方向と前記基準方向とのなす角度を前記移動体の移動方向の角度とする
ことを特徴とする請求項1に記載の移動体の速度・角度計測装置。 - 操作者の操作に基づいて前記切替器の切り替え間隔を変更する手段を備えている
ことを特徴とする請求項1又は2に記載の移動体の速度・角度計測装置。 - 前記検出結果取得手段は、前記データ記憶手段に記憶されているデータに基づいて10ms毎に該10ms内の最大値となる速度及び該速度のときの角度を、前記移動体の速度と角度とする手段を備えている
ことを特徴とする請求項1乃至3の何れかに記載の移動体の速度・角度計測装置。 - 前記検出結果取得手段によって取得された速度と角度を表示する表示手段を備えている
ことを特徴とする請求項1乃至4の何れかに記載の移動体の速度・角度計測装置。 - 前記複数のアンテナのそれぞれは、前記移動体からほぼ等距離の位置に配置されている
ことを特徴とする請求項1乃至5の何れかに記載の移動体の速度・角度計測装置。 - 前記検出結果取得手段は前記所定回数内で前記信号強度が最大となる信号を受信したアンテナの指向性方向を移動体の移動方向として該移動体の移動方向の角度と速度を求めて前記データ記憶手段に記憶する手段を備えている
ことを特徴とする請求項1乃至6の何れかに記載の移動体の速度・角度計測装置。 - 前記検出結果取得手段は前記所定回数内における前記信号強度の時間推移に基づいてビームフォーマ法を用いて前記移動体の移動方向の角度と速度を求めて前記データ記憶手段に記憶する手段を備えている
ことを特徴とする請求項1乃至6の何れかに記載の移動体の速度・角度計測装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013254770A JP2015114143A (ja) | 2013-12-10 | 2013-12-10 | 移動体の速度・角度計測装置 |
| PCT/JP2014/082524 WO2015087867A1 (ja) | 2013-12-10 | 2014-12-09 | 移動体の速度・角度計測装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013254770A JP2015114143A (ja) | 2013-12-10 | 2013-12-10 | 移動体の速度・角度計測装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015114143A true JP2015114143A (ja) | 2015-06-22 |
Family
ID=53371169
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013254770A Pending JP2015114143A (ja) | 2013-12-10 | 2013-12-10 | 移動体の速度・角度計測装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2015114143A (ja) |
| WO (1) | WO2015087867A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022543179A (ja) * | 2019-05-28 | 2022-10-11 | コアエイチダブリュー セミコンダクター オイ | AoD方向探知送信機のアンテナソフトスイッチングの解決策 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2595907B2 (ja) * | 1994-08-30 | 1997-04-02 | 日本電気株式会社 | 電波到来方位探知装置 |
| JP2012078172A (ja) * | 2010-09-30 | 2012-04-19 | Panasonic Corp | 無線通信装置 |
| JP5824857B2 (ja) * | 2011-04-28 | 2015-12-02 | 横浜ゴム株式会社 | 球技用シミュレータ装置および球技用シミュレーション方法 |
-
2013
- 2013-12-10 JP JP2013254770A patent/JP2015114143A/ja active Pending
-
2014
- 2014-12-09 WO PCT/JP2014/082524 patent/WO2015087867A1/ja not_active Ceased
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022543179A (ja) * | 2019-05-28 | 2022-10-11 | コアエイチダブリュー セミコンダクター オイ | AoD方向探知送信機のアンテナソフトスイッチングの解決策 |
| JP7395619B2 (ja) | 2019-05-28 | 2023-12-11 | コアエイチダブリュー セミコンダクター オイ | AoD方向探知送信機のアンテナソフトスイッチングの解決策 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015087867A1 (ja) | 2015-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9835722B2 (en) | Synthetic aperture RFID handheld with tag location capability | |
| US9470782B2 (en) | Method and apparatus for increasing angular resolution in an automotive radar system | |
| CN110297211A (zh) | 一种定位方法及电子设备 | |
| JP2009103457A (ja) | レーダ装置、および保持部材 | |
| JP2009103458A (ja) | レーダ出力最適化方法、およびレーダ出力最適化装置 | |
| US20240372418A1 (en) | Wireless charging method and apparatus, and electronic device | |
| KR100599610B1 (ko) | 부반사판 회전 주기 보정을 이용한 위성 추적 안테나시스템 및 위성 추적 방법 | |
| KR102197086B1 (ko) | 대공 표적 추적을 위한 표적 정밀 추적 장치 및 방법 | |
| JP2021181997A (ja) | レーダ装置 | |
| JP5380267B2 (ja) | 誘導装置及び目標検出方法 | |
| JP2015114143A (ja) | 移動体の速度・角度計測装置 | |
| KR101502551B1 (ko) | 하이브리드 방식 기반의 타겟 추적 장치 | |
| CN105578588A (zh) | 一种基站同步、定位方法和设备 | |
| JP2017125819A (ja) | アンテナチルト装置及び電磁波測定装置 | |
| JPWO2017169300A1 (ja) | アンテナ装置、レーダシステム、及びアンテナ回転方法 | |
| JPH11271418A (ja) | 電波位置標定システム、装置及びその方法 | |
| JP2018159550A (ja) | レーダ制御装置及びレーダ送信電力制御方法 | |
| JP2004132827A (ja) | レーダ装置およびレーダシステム | |
| US10001554B2 (en) | Radar signal processing method and apparatus | |
| FI20215547A1 (en) | Vibration measurements of objects | |
| JP2014159975A (ja) | レーダ装置及びその制御方法 | |
| JP6168913B2 (ja) | レーダ装置 | |
| KR20190136218A (ko) | 신호의 채널 응답 특성을 이용한 안테나 기반의 방사 방향 추정 방법 | |
| JP4788290B2 (ja) | パルスレーダ装置 | |
| KR102429917B1 (ko) | 이종 안테나 장치의 신호 측정 장치 및 방법 |