JP2014517701A - 臨床使用の間の光学形状検出較正に関するテンプレート - Google Patents
臨床使用の間の光学形状検出較正に関するテンプレート Download PDFInfo
- Publication number
- JP2014517701A JP2014517701A JP2013550975A JP2013550975A JP2014517701A JP 2014517701 A JP2014517701 A JP 2014517701A JP 2013550975 A JP2013550975 A JP 2013550975A JP 2013550975 A JP2013550975 A JP 2013550975A JP 2014517701 A JP2014517701 A JP 2014517701A
- Authority
- JP
- Japan
- Prior art keywords
- instrument
- calibration
- template
- optical
- calibration template
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 41
- 238000001514 detection method Methods 0.000 title claims abstract description 32
- 238000000034 method Methods 0.000 claims abstract description 34
- 230000007246 mechanism Effects 0.000 claims description 8
- 238000012544 monitoring process Methods 0.000 claims description 4
- 239000000835 fiber Substances 0.000 description 17
- 239000013307 optical fiber Substances 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000002168 optical frequency-domain reflectometry Methods 0.000 description 4
- 238000004806 packaging method and process Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 230000003595 spectral effect Effects 0.000 description 3
- 238000009455 aseptic packaging Methods 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000009530 blood pressure measurement Methods 0.000 description 2
- 239000011111 cardboard Substances 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 2
- 239000006185 dispersion Substances 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 238000004164 analytical calibration Methods 0.000 description 1
- 238000000149 argon plasma sintering Methods 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 238000012512 characterization method Methods 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000001066 destructive effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000013152 interventional procedure Methods 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 238000002595 magnetic resonance imaging Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000002991 molded plastic Substances 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 239000000123 paper Substances 0.000 description 1
- 239000011087 paperboard Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 230000014616 translation Effects 0.000 description 1
- 230000032258 transport Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/24—Measuring force or stress, in general by measuring variations of optical properties of material when it is stressed, e.g. by photoelastic stress analysis using infrared, visible light, ultraviolet
- G01L1/242—Measuring force or stress, in general by measuring variations of optical properties of material when it is stressed, e.g. by photoelastic stress analysis using infrared, visible light, ultraviolet the material being an optical fibre
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/04—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness by measuring coordinates of points
- G01B21/042—Calibration or calibration artifacts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/30—Containers specially adapted for packaging, protecting, dispensing, collecting or disposing of surgical or diagnostic appliances or instruments
Abstract
医療デバイス較正装置、システム及び方法が、光学形状検出が可能にされた介入的器具102を配置するよう構成される較正テンプレート202を含む。セット幾何学的構成206は、上記器具が配備される環境内でセット幾何学的構成に上記器具を維持するため、上記テンプレートにおいて又はこの上に形成される。上記器具が上記セット幾何学的構成に配置されるとき、上記器具は医療手順のために較正される。
Description
この開示は、器具較正に関し、より詳細には、光学ファイバ検出に関する器具を較正するデバイス、システム及び方法に関する。
光ファィバに基づかれる形状検出は、特徴的なレイリー散乱パターンを持つ光学ファイバにおいて分散された圧力測定に等しい。レイリー散乱は、ファイバ製造処理に固有な、ファイバーコアにおける屈折率のランダム変動の結果として発生する。これらのランダム変動は、格子長に沿った振幅及び位相のランダム変動を持つブラッグ格子としてモデル化されることもできる。圧力又は温度変化が光学ファイバに適用される場合、特徴的なレイリー散乱パターンが変化する。光学測定は、参照散乱パターンを生成するため、まずファイバに適用される圧力/温度刺激なしで実行され、圧力/温度の導入後、再度実行されることができる。緊張/非緊張状態におけるファイバのレイリー散乱スペクトルの相互相関は、適用される圧力から生じるスペクトルシフトを決定する。温度変化
 が原因による、又はファイバ軸に沿った圧力
が原因による、又はファイバ軸に沿った圧力
が原因による、後方散乱されたパターンのこの波長
又は周波数シフト
は、ファイバーブラッグ格子の反応に非常に類似し、
となる。ここで、温度係数KTは、熱拡張及びサーモ光学係数の合計である。圧力係数Kεは、グループ指数n、圧力光学テンソルの要素pi,j及びポアソンの比の関数であり、
となる。こうして、温度又は圧力におけるシフトは、単にスペクトル波長シフト
の線形スケーリングにすぎない。
光学周波数ドメイン反射率測定(OFDR)は、局所レイリー反射パターンの分散検出を可能にするファイバに沿った空間位置の周波数エンコーディングを基本的に実行する。OFDRにおいて、レーザー波長又は光学周波数は、時間にわたり線形変調される。コヒーレントな検出のため、後方散乱された波は、検出器でコヒーレンス参照波と混合される。検出器は、波長を走査する間、建設的干渉から弱め合い干渉への変化により、又はその逆の変化により、変調された信号を受信する。その周波数Ωは、ファイバ上の位置sをマークし、その振幅は、局所後方散乱係数、及び距離sを通る前方プラス後方伝搬の総振幅減衰係数に比例する。例えば、スペクトルアナライザを用いて検出器信号のフーリエ変換を実行することにより、この方法は、ファイバに沿ったすべてのポイントsから後方散乱された波の同時回復を可能にする。こうして、ファイバの異なる部分における圧力は、OFDRと組み合わせて、任意の数のシフト検出又はパターンマッチ方法(例えば相互相関又は他の類似度メトリックを持つブロック―マッチング、信号位相変化の計算等)を用いて、特徴的なレイリー散乱パターンのスペクトルシフトを測定することにより決定されることができる。
2又はこれ以上の光学ファイバが既知の空間関係にあるとき、例えばマルチコア形状検出ファイバに一体化されるとき、形状検出デバイスが、上記の分散圧力測定方法論を用いて構築されることができる。参照レイリー散乱パターン(又は、参照圧力)を持つ参照形状又は位置に基づき、新しい形状は、既知の/所与の/固定された空間関係にあるファイバ間の相対的な圧力を用いて再構成されることができる。
レイリー散乱に基づかれるファイバ光学形状検出システム(OSS)は、既知のプリセットされた位置における散乱パターンの正確な決定に依存する。実験的な研究室環境における光学ベンチトップをシミュレーションすることができる現実的な較正スキームが、現在利用可能である。しかしながら、介入的な環境及びワークフローをシミュレーションする現実的な較正スキームは、存在しない。
本原理によれば、医療デバイス較正装置、システム及び方法は、光学形状検出が可能にされた介入的器具を配置するよう構成される較正テンプレートを含む。セット幾何学的構成は、器具が配備されることになる環境内のセット幾何学的構成に器具を維持するよう、テンプレートにおいて又はこの上に形成される。器具がセット幾何学的構成に配置されるとき、器具は、医療手順に関して較正される。
医療デバイス較正装置は、光学形状検出が可能にされた介入的器具を配置するよう構成される較正テンプレートと、ある環境内のセット幾何学的構成に器具を維持するよう、テンプレートにおいて又はこの上に形成されるセット幾何学的構成とを含む。ここで、器具がセット幾何学的構成に配置されるとき、器具は医療手順に関して較正されるよう、器具が配備されることになる。
医療器具を較正する方法が、光学形状検出が可能にされた介入的器具を配置するよう構成される較正テンプレートを提供するステップと、器具が配備されることになる介入的な環境内で、較正テンプレートに対してセット幾何学的構成に器具を維持するステップと、器具における光学センサからの光学フィードバックを用いて、セット幾何学的構成における医療器具を較正するステップとを含む。
本開示におけるこれら及び他の目的、特徴及び利点は、添付の図面と共に参照される、その説明的な実施形態の以下の詳細な説明から明らかになる。
本開示は、以下の図面を参照して好ましい実施形態の以下の説明を詳細に提供する。
本開示は、介入的な環境及びワークフローにおいて介入的器具を較正するデバイス、システム及び方法を表す。ある実施形態では、配置されたテンプレートが、器具に関して提供される。テンプレートは、器具と共に包装されることができるか、又は別々に提供されることができる。テンプレートは、臨床環境内の所定の幾何学的構成において器具を固定するよう構成される。この幾何学的構成において、器具は、手順と同時に又は手順に先立って較正されることができる。
特に有益な実施形態において、器具は、レイリー散乱に基づかれるファイバ光学形状検出システム(OSS)を含む。この器具は、例えば、カテーテル又は他の細長い器具に関する、既知のプリセットされた位置における光散乱パターンの正確な決定に依存する。較正の間の特定の形状又は形状のセットに関する散乱パターンが、関心の対象である。実験的な研究室環境において光学ベンチトップを用いる較正スキームを、臨床環境用に変換することは容易ではない。本原理は、介入的な環境及びワークフローにおける現実的な較正技術を提供するため、テンプレート(使い捨て可能)を提供する。特に、レイリー散乱ベースの形状検出システムに関する追跡されたデバイス包装に組み込まれる使い捨ての較正テンプレートが、提供される。
本発明は、医療器具に関して説明されるが、本発明の教示は、非常に広く、複雑な生物学的又は機械的なシステムを追跡又は解析するのに使用される任意の器具に適用可能である点を理解されたい。特に、本原理は、生体系の内部追跡手順、例えば肺、消化管、排泄器官、血管等の体のすべての領域における手順に適用可能である。図面に示される要素は、ハードウェア及びソフトウェアの様々な組合せにおいて実現されることができ、単一の要素又は複数の要素において組み合わせられることができる機能を提供することができる。
図面に示されるさまざまな要素の機能は、専用のハードウェアの使用を介してというだけでなく、適切なソフトウェアに関連してソフトウェアを実行することができるハードウェアの使用を介して与えられることができる。プロセッサにより提供されるとき、この機能は、単一の専用のプロセッサにより、単一の共有プロセッサにより、又は複数の個別のプロセッサにより与えられることができる。個別のプロセッサの幾つかは、共有されることができる。更に、「プロセッサ」又は「コントローラ」という用語の明確な使用は、ソフトウェアを実行することができるハードウェアを排他的に参照するものとして解釈されるべきではなく、デジタル信号プロセッサ(「DSP」)ハードウェア、ソフトウェアを格納する読出し専用メモリ(「ROM」)、ランダムアクセスメモリ(「RAM」)、不揮発性ストレージ等を暗に含むが、これらに限定されるものではない。
更に、本発明の原理、側面及び実施形態並びに特定の実施例を述べる本書におけるすべての記載は、その構造的及び機能的均等の範囲の両方を含むものとして意図される。更に、斯かる均等物が、現在既知の均等物だけでなく将来開発される均等物の両方を含む(即ち、構造に関係なく、同じ機能を実行すべく開発される任意の要素を含む)ものとして意図される。従って、例えば、本書に与えられるブロック図は、本発明の原理を実現する説明的なシステム要素及び/又は回路の概念表示を表すという点を当業者は理解されたい。同様に、任意のフローチャート、フロー図等は、コンピュータ可読媒体において実質的に表されるさまざまな処理を示し、従って、コンピュータ又はプロセッサが明示的に示されるかどうかに関係なく、斯かるコンピュータ又はプロセッサにより実行される点を理解されたい。
更に、本発明の実施形態は、コンピュータ若しくは任意の命令実行システムによる使用又はこれに関連した使用のためのプログラムコードを提供する、コンピュータが使用可能な又はコンピュータ可読のストレージ媒体から、アクセス可能なコンピュータプログラムの形をとることができる。この説明のため、コンピュータが使用可能な又はコンピュータ可読ストレージ媒体は、命令実行システム、装置又はデバイスによる使用又はこれに関連した使用のためのプログラムを、包含、格納、通信、伝搬、又は輸送することができる任意の装置とすることができる。媒体は、電気、磁気、光学、電磁気、赤外線若しくは半導体システム(又は、装置若しくはデバイス)、又は伝搬媒体とすることができる。コンピュータ可読媒体の例は、半導体又はソリッドステートメモリ、磁気テープ、リムーバブルコンピュータディスケット、ランダムアクセスメモリ(RAM)、読出し専用メモリ(ROM)、リジッド磁気ディスク及び光学ディスクを含む。光学ディスクの現在の例は、読出し専用コンパクトディスク(CD−ROM)、読出し/書込みコンパクトディスク(CD−R/W)及びDVDを含む。
図面を参照する。図面では、同様な符号が同じ又は類似する要素を表す。最初に図1を参照すると、医療手順を実行するシステム100が、図示される。システム100は、手順を監督及び管理するのに使用されるワークステーション又は端末112を含むことができる。ワークステーション112は、プログラム及びアプリケーションを格納する1つ又は複数のプロセッサ114及びメモリ116を好ましくは含む。メモリ116は、形状検出デバイス104からの光学フィードバック信号を解釈するよう構成される光学検出モジュール115を格納することができる。光学検出モジュール115は、較正プログラム142を含む。これは、実行されるとき、格納された較正値と所与の入力信号とを比較する。光学検出モジュール115は、光学信号フィードバック(及び例えば、電磁気(EM)追跡といった他の任意のフィードバック)を用いて、医療デバイス102及び/又はその周囲領域に関連付けられる変形、屈折及び他の変化を再構成するよう構成される。較正プログラム142は、格納されたデータ(収集又は入力されたもの)と器具データ(収集又は入力されたもの)とを比較する。医療デバイス102は、カテーテル、ガイドワイヤ、プローブ、内視鏡、ロボット又は他のアクティブデバイス等を含むことができる。
ワークステーション112は、対象物又は患者の内部画像を表示するディスプレイ118を含むことができ、撮像システム110が使用される場合、器具又は医療デバイス102の較正手順の間に使用されることができる。撮像システム110は、磁気共鳴撮像(MRI)システム、蛍光透視システム、コンピュータ断層撮影(CT)システム等を含むことができる。ディスプレイ118は、ユーザがワークステーション112並びにその要素及び機能と相互作用することも可能にする。これは、ワークステーション112とのユーザ相互作用を可能にするためのキーボード、マウス、ジョイスティック又は他の任意の周辺機器若しくは制御部を含むことができるインタフェース120により、更に容易にされる。
システム100は、ワークステーション112と一体化されることができる又は別々のシステムとすることができる、電磁気(EM)追跡システムを含むことができる。EM追跡システムは、手順の間、医療デバイス102により生成されるEM信号を解釈するために使用されるEM検出モジュール117を含む。医療デバイス102は、デバイス102に取り付けられることができる1つ又は複数のEM追跡センサ124を含む。磁場生成器及び制御モジュール122は、追跡アプリケーションにおいて使用される1つ若しくは複数のコイル又は他の磁場生成源を含むことができる。
EM検出モジュール117及び光学検出モジュール115は、手順の内部画像を取得及び表示するため又は手順の活動を追跡することについて他の態様で支援するため、画像取得モジュール144を具備することができる。
ワークステーション112は、光学ファイバに光を提供するための光源106を含む。光学監視ユニット108は、すべてのファイバに光を送信し、すべてのファイバからの光を検出するために使用される。これは、圧力又は他のパラメータの決定を可能にする。このパラメータは、介入デバイス102の形状、方向等を解釈するために用いられる。光信号は、デバイス102又はシステム100を較正するためのフィードバック(例えば、レイリー散乱)として使用される。
形状検出デバイス104は、手順の間の幾何学的な検出のために構成される1つ又は複数のファイバを含むことができる。本原理によれば、較正テンプレート140は、形状追跡に関して、又は例えば後方散乱コラプション及びエラー特徴化といった他のエラーに関して、器具102を較正するのに用いられるよう提供される。
光学監視モジュール108は、器具又はデバイス102の形状を決定するため、光学検出モジュール115(例えば、形状決定プログラム)と共に機能する。測定エラー及び信頼区間は、器具を較正するのに使用されるデータ(例えば、散乱情報)を生成するため、固定されたジオメトリに器具102を保つ、維持する又は誘導するためのテンプレート140を用いて決定されることができる。
ある実施形態では、例えばカテーテル、ICEプローブ、スコープ、ロボット等の光学形状検出(OSS)が可能にされた介入デバイスが、テンプレート140を用いて、正確な圧力及びねじれプリセットジオメトリでパッケージ化される。包装は、ブリスターパック、成形プラスチック又は他の物質等を含むことができる。例えば、デバイス102は、無菌包装における既知のジオメトリの使い捨ての較正テンプレートに取り付けられることができ、それがテンプレート140において固定して保持される間、形状検出器具102の較正が実行されることができる。テンプレート140は、複数の構成を含むことができる。構成のいくつかは、較正のためデバイスをゆがめる幾何学的なパターン(半径等)を持つ使い捨ての紙又はボール紙、デバイスを固定するための幾何学的に配置されたホールド位置を持つスタンド又は他の機構、デバイスをスライド可能に固定するための幾何学的な位置を持つ管等を含む。
図2を参照すると、1つの説明的な実施形態に基づかれるテンプレート202が示される。テンプレート202は、シート204を含む。これは、紙、ボール紙、プラスチック等を含むことができる。シート204は、セット幾何学的なパターンを含む。これは、半径206、208及び210、蛇行パターン212又は他の任意の有益なパターンを含むことができる。ある実施形態では、パターンは、特定の器具に適合するための溝を提供することができ、又は器具を適所に保持するための固定機構214が提供されることができる。各パターン、溝等は、パターン、溝等を表すラベル216を含むことができる。
図3を参照すると、別の説明的な実施形態に基づかれる別のテンプレート302が示される。この実施形態において、より複雑なテンプレートが提供されることができる。この例では、テンプレート302は、3次元であり、OSS機能を持つ医療器具を固定するため3つの位置304を提供する。この例において、センター位置は、並進可能であり(矢印「A」の方向)、回転可能である(矢印「B」の方向)。器具(図示省略)は、各位置304の上部部分306にて固定されることができ、センター位置304を用いて再配置されることができる。較正は、複数の位置の各々で実行されることができる。他の実施形態では、センター位置が固定されることができ、1つ又は複数の他の位置が移動されることができる点を理解されたい。任意の数の位置304が、使用されることができる。異なる並進及び回転が必要に応じて与えられることができる。他の機構も想定される点に留意されたい。
ある実施形態では、テンプレート302は、医療デバイス(102)の包装の部分とすることができる。テンプレート302(及び/又は包装)は、初期の較正データを持つバーコード又は無線周波数識別タグ310を含むことができる。これは、デバイス(102)を較正するのに使用されることができる。
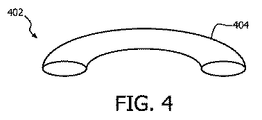
図4を参照すると、別の説明的な実施形態に基づかれる別のテンプレート402が示される。テンプレート402は、半環状体404を含む。器具(図示省略)は、所望の形状を提供するため、管404に挿入されることができる。管404は、任意の数の構成を提供するよう構成されることができ、器具構成を観測するために透過的でありえる。
好ましい実施形態において、OSSが可能にされた介入デバイス(102)の包装が、テンプレート(140)を含む。デバイスは、無菌包装における既知のジオメトリの使い捨て較正テンプレートに取り付けられることができる。それが包装内部又は外部においてテンプレート内に固定して保持される間、形状検出器具(102)の較正が実行されることができる。
図5を参照すると、臨床環境においてOSS器具を較正する方法が、図示される。ブロック502において、器具に関する較正情報及び状態が提供される。これは、所与の状態(半径Xcm)に対する光学損失又は散乱情報(単位dB)といった書き込まれたデータを含むことができる。ある実施形態では、較正テンプレートのジオメトリを表すデータが、ブロック503においてユーザによりスキャンされる包装上のバーコード又は他の手段から読み出されることができる。これは、ソフトウェアデータベースに格納される完全なジオメトリデータレコードへのリンクとして使用されることができる。別の実施形態では、無線周波数識別(RFID)タグが、データを伝達するために使用されることができる。
ブロック504において、OSS器具が包装される無菌パッケージが、開かれる。ブロック506において、較正テンプレート及び追跡されるデバイスアセンブリが、パッケージから除去される。ブロック508において、テンプレートは、介入的な又は臨床環境内に、例えば、X線テーブル又は他のプラットフォームの所定の位置上に又はその位置に、セットアップしてドッキング又は配置される。ブロック510において、デバイスコネクタは、端末又はワークステーション(図1を参照)に結合される。
ブロック512において、器具又はデバイスが、較正テンプレートにおいてセットされる。ある実施形態では、較正テンプレートは、(ブロック502から)初期のデータを得るために使用される状態を提供するよう構成される。ブロック513において、初期の調整が、テンプレートにおける器具に対して実行されることができる。テンプレートにより提供される器具に関する経路が、(例えば、溝、ノッチ等を用いて)非幾何学的な原点のねじれが排除される態様で設計されることができる。
ブロック514において、固定されたジオメトリ(例えば、所定のまっすぐな経路、既知の湾曲等)において器具が較正テンプレート内に保持される間、較正プログラムが実行される。較正は、初期のデータ又は以前に収集されたデータと測定されたデータとを比較するために使用されることができる。較正は、初期のデータと、臨床環境における較正テンプレートにおいて現在測定される器具構成との間の差を生み出す。この差は、データオフセット又は修正を提供し、デバイスが更にチェックされる必要があるかを示し、他の問題を示す等のために使用されることができる。
ブロック516において、プリセットされた位置における測定された干渉信号に基づき、例えば、光学監視システム(図1を参照)によるモータ駆動のコントローラ、作動部材等を用いて、光学整列が調整される。較正又は再調整のため、他の調整が、テンプレートにおける器具になされることもできる。
ブロック518において、デバイスは、較正テンプレートからデバイスを除去することにより、臨床使用のために準備される。ブロック520において、介入的な手順が実施される。
添付の特許請求の範囲を解釈するにあたり、以下の点を理解されたい。
a)「有する」という語は、所与の請求項に記載される要素又はステップ以外の他の要素又はステップの存在を除外するものではない。
b)ある要素に先行する「a」又は「an」という語は、斯かる要素が複数存在することを除外するものではない。
c)請求項における任意の参照符号は、それらの範囲を制限するものではない。
d)複数の「手段」が、同じアイテム、又は、ハードウェア、又はソフトウェア実現による構造体、又は機能により表されることができる。
e)特に指定がない限り、ステップの特定のシーケンスが必要とされること意図するものではない。
臨床用の光学形状検出較正テンプレートに関するデバイス、システム及び方法に対して好ましい実施形態が説明されてきたが(これは、説明的なものであり、限定を目的とするものではない)、上記の教示を考慮して、修正及び変動が当業者によりなされることができる点に留意されたい。従って、添付の特許請求の範囲により概説される本開示の実施形態の範囲に含まれるものとして、本開示の特定の実施形態において変更がなされることができる点を理解されたい。こうして、本開示の詳細が特許法により必要とされる範囲で詳細に記載されてきたが、特許証により保護されることを望む保護の請求は、添付の特許請求の範囲に記載される。
Claims (30)
- 医療器具に関する較正システムであって、
光学形状検出が可能にされた介入的器具を配置し、前記器具が配備される環境において前記器具をセット幾何学的構成にセットするよう構成される較正テンプレートと、
前記較正テンプレートにおいて前記器具からの光学フィードバックを集めるよう構成される光学監視モジュールと、
メモリに格納され、較正データと前記光学フィードバックとを比較するため、プロセッサにより実行される較正プログラムとを有する、較正システム。 - 前記較正テンプレートが、前記器具の前記セット幾何学的構成を提供するため、1つ又は複数の較正パターンを持つシートを含む、請求項1に記載のシステム。
- 前記1つ又は複数の較正パターンが、前記セット幾何学的構成に前記器具を固定するための溝を含む、請求項2に記載のシステム。
- 前記1つ又は複数の較正パターンが、前記セット幾何学的構成に前記器具を固定するための固定機構を含む、請求項2に記載のシステム。
- 前記較正テンプレートが、前記器具の前記セット幾何学的構成を提供するため、3次元機構を含む、請求項1に記載のシステム。
- 前記3次元機構が、成形された包装を含む、請求項5に記載のシステム。
- 前記3次元機構が、長手軸に沿って前記器具を固定するための位置ポイントを含む、請求項5に記載のシステム。
- 前記位置ポイントの少なくとも1つが、前記長手軸に沿って前記器具を再配置するため、移動可能である、請求項7に記載のシステム。
- 前記較正テンプレートが、使い捨てである、請求項7に記載のシステム。
- 前記較正テンプレートが、無菌化されたパッケージにおいて前記器具と共に包装される、請求項1に記載のシステム。
- 前記無菌化されたパッケージは、前記較正テンプレートにおいてドッキングされる間、前記器具から集められる測定されたデータと比較するのに使用される初期の較正データを含む、請求項10に記載のシステム。
- 前記初期の較正データが、バーコード及び無線識別タグのいずれかに格納される、請求項10に記載のシステム。
- 医療デバイス較正装置であって、
光学形状検出が可能にされた介入的器具を配置するよう構成される較正テンプレートと、
前記テンプレートにおいて又はこの上に形成されるセット幾何学的構成であって、ある環境内で前記セット幾何学的構成に前記器具を維持するためのものであり、前記環境において、前記器具が前記セット幾何学的構成に配置されるとき、前記器具が医療手順に関して較正されるよう、前記器具が配備される、医療デバイス較正装置。 - 前記較正テンプレートが、シートを含み、前記セット幾何学的構成は、1つ又は複数の較正パターンを含む、請求項13に記載のデバイス。
- 前記1つ又は複数の較正パターンが、前記器具を固定するための溝を含む、請求項14に記載のデバイス。
- 前記1つ又は複数の較正パターンが、前記器具を固定するための固定機構を含む、請求項14に記載のデバイス。
- 前記較正テンプレートが、前記器具の前記セット幾何学的構成を提供するため、3次元機構を含む、請求項13に記載のデバイス。
- 前記3次元機構が、成形された包装を含む、請求項17に記載のデバイス。
- 前記3次元機構が、長手軸に沿って前記器具を固定するための位置ポイントを含む、請求項17に記載のデバイス。
- 前記位置ポイントの少なくとも1つが、前記長手軸に沿って前記器具を再配置するため、移動可能である、請求項19に記載のデバイス。
- 前記較正テンプレートが、使い捨てである、請求項19に記載のデバイス。
- 前記較正テンプレートが、無菌化されたパッケージにおいて前記器具と共に包装される、請求項13に記載のデバイス。
- 前記無菌化されたパッケージは、前記較正テンプレートにおいてドッキングされる間、前記器具から集められる測定されたデータと比較するのに使用される初期の較正データを含む、請求項22に記載のデバイス。
- 前記初期の較正データが、バーコード及び無線識別タグのいずれかに格納される、請求項23に記載のデバイス。
- 医療器具を較正する方法において、
光学形状検出が可能にされた介入的器具を配置するよう構成される較正テンプレートを提供するステップと、
前記器具が配備される介入的な環境内で、前記較正テンプレートに対してセット幾何学的構成に前記器具を維持するステップと、
前記器具における光学センサからの光学フィードバックを用いて、前記セット幾何学的構成における前記医療器具を較正するステップとを有する、方法。 - 前記較正テンプレート及び前記器具が、一緒に包装され、前記較正テンプレートは、使い捨てである、請求項25に記載の方法。
- 前記較正テンプレートが、1つ又は複数の較正パターンを持つシートの1つと、前記器具の前記セット幾何学的構成を提供するための3次元機構とを含む、請求項25に記載の方法。
- 前記3次元機構が、長手軸に沿って前記器具を固定するための位置ポイントを含み、前記位置ポイントの少なくとも1つは、前記長手軸に沿って前記器具を再配置するため移動可能である、請求項27に記載の方法。
- 前記較正テンプレートにドッキングされる間、前記器具から集められる測定されたデータと比較するのに使用される初期の較正データを提供するステップを更に有する、請求項19に記載の方法。
- 前記初期の較正データが、前記器具に関する包装においてバーコード及び無線識別タグのいずれかに格納される、請求項29に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161436690P | 2011-01-27 | 2011-01-27 | |
| US61/436,690 | 2011-01-27 | ||
| PCT/IB2012/050246 WO2012101551A1 (en) | 2011-01-27 | 2012-01-18 | Templates for optical shape sensing calibration during clinical use |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014517701A true JP2014517701A (ja) | 2014-07-24 |
| JP2014517701A5 JP2014517701A5 (ja) | 2015-03-05 |
Family
ID=45567067
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013550975A Withdrawn JP2014517701A (ja) | 2011-01-27 | 2012-01-18 | 臨床使用の間の光学形状検出較正に関するテンプレート |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20130301031A1 (ja) |
| EP (1) | EP2667773A1 (ja) |
| JP (1) | JP2014517701A (ja) |
| CN (1) | CN103607948A (ja) |
| RU (1) | RU2013139540A (ja) |
| WO (1) | WO2012101551A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013168056A1 (en) * | 2012-05-10 | 2013-11-14 | Koninklijke Philips N.V. | Gesture control |
| WO2014049521A1 (en) * | 2012-09-28 | 2014-04-03 | Koninklijke Philips N.V. | Temperature controlled calibration for optical shape sensing |
| WO2014053934A1 (en) * | 2012-10-01 | 2014-04-10 | Koninklijke Philips N.V. | System and method for registering shape sensing with imaging using an optimal plane |
| GB2506858A (en) * | 2012-10-09 | 2014-04-16 | Elcometer Ltd | Measuring instrument that reads data provided on another article |
| JP6153385B2 (ja) * | 2013-05-29 | 2017-06-28 | オリンパス株式会社 | 校正補助装置、湾曲システム及び校正方法 |
| JP6153414B2 (ja) * | 2013-08-06 | 2017-06-28 | オリンパス株式会社 | 挿入システム及び形状センサの形状検出特性を調整する方法 |
| US11690975B2 (en) * | 2015-10-02 | 2023-07-04 | Koninklijke Philips N.V. | Hub for device navigation with optical shape sensed guidewire |
| WO2017213874A1 (en) | 2016-06-09 | 2017-12-14 | Intuitive Surgical Operations, Inc. | Methods and apparatus for calibration for a fiber optic shape sensor |
| WO2022248967A1 (en) * | 2021-05-24 | 2022-12-01 | Ramot At Tel-Aviv University Ltd. | Shape sensing of multimode optical fibers |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4650327A (en) * | 1985-10-28 | 1987-03-17 | Oximetrix, Inc. | Optical catheter calibrating assembly |
| WO2001033165A1 (en) * | 1999-10-29 | 2001-05-10 | Advanced Sensor Technology, Llc | Optical fiber navigation system |
| ES2331128T3 (es) * | 2004-11-17 | 2009-12-22 | Pulsion Medical Systems Ag | Dispositivo reflector de calibracion y disposicion de sonda equipada con el mismo. |
| US9186046B2 (en) * | 2007-08-14 | 2015-11-17 | Koninklijke Philips Electronics N.V. | Robotic instrument systems and methods utilizing optical fiber sensor |
| US8183520B2 (en) * | 2009-11-13 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Optical fiber shape sensor calibration |
-
2012
- 2012-01-18 WO PCT/IB2012/050246 patent/WO2012101551A1/en active Application Filing
- 2012-01-18 US US13/981,093 patent/US20130301031A1/en not_active Abandoned
- 2012-01-18 EP EP12702883.5A patent/EP2667773A1/en not_active Withdrawn
- 2012-01-18 JP JP2013550975A patent/JP2014517701A/ja not_active Withdrawn
- 2012-01-18 CN CN201280006461.9A patent/CN103607948A/zh active Pending
- 2012-01-18 RU RU2013139540/28A patent/RU2013139540A/ru not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| US20130301031A1 (en) | 2013-11-14 |
| RU2013139540A (ru) | 2015-03-10 |
| CN103607948A (zh) | 2014-02-26 |
| EP2667773A1 (en) | 2013-12-04 |
| WO2012101551A1 (en) | 2012-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11642031B2 (en) | Medical device insertion and exit information using distributed fiber optic temperature sensing | |
| JP2014517701A (ja) | 臨床使用の間の光学形状検出較正に関するテンプレート | |
| JP6226751B2 (ja) | インターベンショナル環境内への光ファイバ形状検知の統合 | |
| US9693707B2 (en) | Optical shape sensing fiber for tip and shape characterization of medical instruments | |
| JP6195795B2 (ja) | 形状検出装置固有の情報の保存及び検索 | |
| US9607381B2 (en) | Accurate and rapid mapping of points from ultrasound images to tracking systems | |
| US11547489B2 (en) | Shape sensing of multiple over-the-wire devices | |
| US20150141764A1 (en) | Distributed sensing device for referencing of physiological features | |
| US10143523B2 (en) | Systems, methods and devices for tracking and calibration of flexible instruments | |
| WO2014053934A1 (en) | System and method for registering shape sensing with imaging using an optimal plane | |
| US11344222B2 (en) | Systems and methods for determining the position of a non-shape-sensed guidewire with a shape-sensed catheter and for visualizing the guidewire | |
| WO2014191871A1 (en) | Optical shape sensing device calibration, characterization and failure detection |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150109 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150109 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20150604 |