JP2014119086A - 吐出弁ユニット、及びポンプシステム - Google Patents
吐出弁ユニット、及びポンプシステム Download PDFInfo
- Publication number
- JP2014119086A JP2014119086A JP2012276595A JP2012276595A JP2014119086A JP 2014119086 A JP2014119086 A JP 2014119086A JP 2012276595 A JP2012276595 A JP 2012276595A JP 2012276595 A JP2012276595 A JP 2012276595A JP 2014119086 A JP2014119086 A JP 2014119086A
- Authority
- JP
- Japan
- Prior art keywords
- valve
- opening
- pump
- valve opening
- closing speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Electrically Driven Valve-Operating Means (AREA)
Abstract
【解決手段】吐出弁ユニットは、ポンプ330の吐出側に設けられる吐出弁334と、吐出弁334を可変速に開閉させるモータ336と、モータ336を介して吐出弁334の開閉を制御することによって、ポンプ330から吐出される液体の流量を制御する弁制御部214と、を備える。弁制御部214は、吐出弁334の単位弁開閉速度あたりの液体の流量変化率があらかじめ設定された範囲内になるように、吐出弁334の開度ごとに弁開閉速度が設定された第1の弁開閉速度パターンにしたがって、吐出弁334の開閉を制御する。
【選択図】図1
Description
の翼角度の制御などがあるが、ポンプ停止時などに液体が逆流するのを防止するためには何らかの弁の設置が必要である。これに加えて、回転速度制御のためのインバータ装置や複雑な翼角操作機構が必要となるため、設置費用が高く、維持管理も複雑になるなど、経済性に難がある。
て第3の範囲内の弁開閉速度が設定され、前記第3の弁開度領域より大きい第4の弁開度領域に対して前記第3の範囲内の弁開閉速度より大きい第4の範囲内の弁開閉速度が設定された第3の弁開閉速度パターンにしたがって、前記バッテリ電源を用いて前記弁を閉止制御し、前記弁を逆止弁として機能させる。
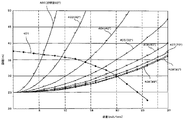
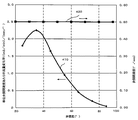
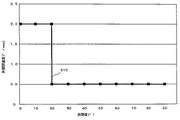
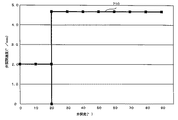
ここで、弁制御部214による制御の第1実施形態について説明するが、その前に、本実施形態で用いるポンプの流量制御特性と、比較例について説明する。図2は、本実施形態で用いるポンプの流量制御特性の一例を示す図である。図3は、比較例における弁開閉速度パターンと単位弁開度速度あたりの流量変化率の一例を示す図である。
り約0.50(°/sec)に固定した場合のポンプ330の流量変化率(言い換えれば、吐出弁334の単位弁開閉速度あたりの水の流量変化率)をシミュレートしたものである。
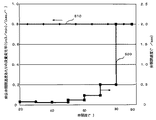
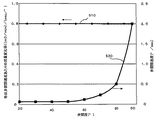
ごとの弁の開閉速度をあらかじめ設定するということである。あらかじめ設定された吐出弁334の開度ごとの弁の開閉速度(グラフ520)は、第1の弁開閉速度パターンを形成する。
第2実施形態は、第1実施形態と同様に、第1の弁開閉速度パターンに基づいて吐出弁334の開閉を制御することに加えて、ポンプ330が始動運転又は停止運転を行っている際には、第2の弁開閉速度パターンに基づいて吐出弁334の開閉を制御するものである。第1実施形態と重複する箇所については適宜説明を省略する。
.1°/sec以上約2.0°/sec未満)で流動的に設定することができる。また、好ましくは、第2の範囲を、約0.1°/sec以上約1.0°/sec未満とし、弁開閉速度は、この第2の範囲内で流動的に設定することができる。
第3実施形態は、第2実施形態と同様に、第1又は第2の弁開閉速度パターンに基づいて吐出弁334の開閉を制御することに加えて、ポンプ330がトリップ(電源断)した際には、第3の弁開閉速度パターンに基づいて吐出弁334の開閉を制御するものである。第1,第2実施形態と重複する箇所については適宜説明を省略する。
用いられていた逆止弁を省略することが可能となり、システムの簡素化を図ることができる。
3実施形態におけるポンプの流量制御のフローチャートである。
210 受配電・操作制御盤
214 弁制御部(制御部)
300 ポンプ設備
320 吸込水槽
330 ポンプ
331 吸水配管
332 電動機
333 送水配管
334 吐出弁
336 モータ(ドライバ)
350 吐出弁ユニット
1000 ポンプシステム
Claims (7)
- 液体を揚排液するポンプの吐出側に設けられる吐出弁ユニットであって、
前記ポンプの吐出側に設けられる弁と、
前記弁を可変速に開閉させるドライバと、
前記ドライバを介して前記弁の開閉を制御することによって、前記ポンプから吐出される液体の流量を制御する制御部と、を備え、
前記制御部は、前記弁の単位弁開閉速度あたりの前記液体の流量変化率があらかじめ設定された範囲内になるように、前記弁の開度ごとに前記弁の単位弁開閉速度が設定された第1の弁開閉速度パターンにしたがって、前記弁の開閉を制御する、
ことを特徴とする吐出弁ユニット。 - 請求項1の吐出弁ユニットにおいて、
前記制御部は、前記ポンプが通常運転をしているか、前記ポンプが始動信号に応じて始動運転をしているか、又は前記ポンプが停止信号に応じて停止運転をしているかを判定し、
前記ポンプが通常運転をしていると判定した場合は、前記第1の弁開閉速度パターンにしたがって前記弁の開閉を制御し、
前記ポンプが始動運転又は停止運転をしていると判定した場合は、第1の弁開度領域に対して第1の範囲内の弁開閉速度が設定され、前記第1の弁開度領域より大きな第2の弁開度領域に対して前記第1の範囲内の弁開閉速度より小さい第2の範囲内の弁開閉速度が設定された第2の弁開閉速度パターンにしたがって、前記弁の開閉を制御する、
ことを特徴とする吐出弁ユニット。 - 請求項2の吐出弁ユニットにおいて、
前記制御部は、前記ポンプが始動運転又は停止運転をしていると判定した場合は、前記弁の開度が20°〜40°の所定開度未満の第1の弁開度領域に対して第1の範囲内の弁開閉速度が設定され、前記所定開度以上の第2の弁開度領域に対して前記第1の範囲内の弁開閉速度より小さい第2の範囲内の弁開閉速度が設定された第2の弁開閉速度パターンにしたがって、前記弁の開閉を制御する、
ことを特徴とする吐出弁ユニット。 - 請求項1乃至3のいずれか1項の吐出弁ユニットにおいて、
停電時に前記制御部に電源を供給するバッテリ電源を備え、
前記制御部は、前記ポンプが通常運転をしているか、又は前記ポンプが停電による緊急停止信号に応じて緊急停止運転をしているかを判定し、
前記ポンプが通常運転をしていると判定した場合は、前記第1の弁開閉速度パターンにしたがって前記弁の開閉を制御し、
前記ポンプが緊急停止運転をしていると判定した場合は、第3の弁開度領域に対して第3の範囲内の弁開閉速度が設定され、前記第3の弁開度領域より大きな第4の弁開度領域に対して前記第3の範囲内の弁開閉速度より大きい第4の範囲内の弁開閉速度が設定された第3の弁開閉速度パターンにしたがって、前記バッテリ電源を用いて前記弁を閉止制御し、前記弁を逆止弁として機能させる、
ことを特徴とする吐出弁ユニット。 - 請求項4の吐出弁ユニットにおいて、
前記制御部は、前記ポンプが緊急停止運転をしていると判定され、かつ、前記弁の開度が前記第4の弁開度領域にある場合は、前記第4の範囲内の弁開閉速度によって前記弁を閉止制御し、前記弁の開度が前記第3の弁開度領域まで閉止されたら、前記第3の弁開度領域まで閉止された時の開度で所定時間弁の閉止制御を停止し、所定時間経過後、前記第
3の範囲内の弁開閉速度によって前記弁を閉止制御する、
ことを特徴とする吐出弁ユニット。 - 請求項1乃至5のいずれか1項の吐出弁ユニットにおいて、
停電時に前記制御部に電源を供給するバッテリ電源を備え、
前記制御部は、前記ポンプが通常運転をしているか、前記ポンプが始動信号に応じて始動運転をしているか、前記ポンプが停止信号に応じて停止運転をしているか、又は前記ポンプが停電による緊急停止信号に応じて緊急停止運転をしているかを判定し、
前記ポンプが通常運転をしていると判定した場合は、前記第1の弁開閉速度パターンにしたがって前記弁の開閉を制御し、
前記ポンプが始動運転又は停止運転をしていると判定した場合は、前記第1の弁開度領域に対して第1の範囲内の弁開閉速度が設定され、前記第1の弁開度領域より大きな第2の弁開度領域に対して前記第1の範囲内の弁開閉速度より小さい第2の範囲内の弁開閉速度が設定された第2の弁開閉速度パターンにしたがって、前記弁の開閉を制御し、
前記ポンプが緊急停止運転をしていると判定した場合は、前記第3の弁開度領域に対して第3の範囲内の弁開閉速度が設定され、前記第3の弁開度領域より大きな第4の弁開度領域に対して前記第3の範囲内の弁開閉速度より大きい第4の範囲内の弁開閉速度が設定された第3の弁開閉速度パターンにしたがって、前記バッテリ電源を用いて前記弁を閉止制御し、前記弁を逆止弁として機能させる、
ことを特徴とする吐出弁ユニット。 - 液体を貯留する液体槽と、
前記液体槽に貯留された液体を揚排液するポンプと、
前記ポンプを駆動する駆動機と、
前記ポンプの吐出側に設けられた請求項1乃至7のいずれか1項の吐出弁ユニットと、
を備えたことを特徴とするポンプシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012276595A JP6099386B2 (ja) | 2012-12-19 | 2012-12-19 | 吐出弁ユニット、及びポンプシステム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012276595A JP6099386B2 (ja) | 2012-12-19 | 2012-12-19 | 吐出弁ユニット、及びポンプシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014119086A true JP2014119086A (ja) | 2014-06-30 |
| JP6099386B2 JP6099386B2 (ja) | 2017-03-22 |
Family
ID=51174091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012276595A Active JP6099386B2 (ja) | 2012-12-19 | 2012-12-19 | 吐出弁ユニット、及びポンプシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6099386B2 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4949331U (ja) * | 1972-08-08 | 1974-04-30 | ||
| JPS5217142A (en) * | 1975-08-01 | 1977-02-08 | Hitachi Ltd | Process for operating water-wheel of pump and device therefor |
| JPS5581277A (en) * | 1978-12-13 | 1980-06-19 | Hitachi Ltd | Controlling method for inlet valve |
| US20100276004A1 (en) * | 2007-10-19 | 2010-11-04 | Alfa Laval Kolding A/S | Method for Operating a Valve |
| JP2011163128A (ja) * | 2010-02-04 | 2011-08-25 | Fuji Electric Co Ltd | 水量調整弁制御装置 |
-
2012
- 2012-12-19 JP JP2012276595A patent/JP6099386B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4949331U (ja) * | 1972-08-08 | 1974-04-30 | ||
| JPS5217142A (en) * | 1975-08-01 | 1977-02-08 | Hitachi Ltd | Process for operating water-wheel of pump and device therefor |
| JPS5581277A (en) * | 1978-12-13 | 1980-06-19 | Hitachi Ltd | Controlling method for inlet valve |
| US20100276004A1 (en) * | 2007-10-19 | 2010-11-04 | Alfa Laval Kolding A/S | Method for Operating a Valve |
| JP2011163128A (ja) * | 2010-02-04 | 2011-08-25 | Fuji Electric Co Ltd | 水量調整弁制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6099386B2 (ja) | 2017-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6767568B2 (ja) | 気体圧縮機 | |
| JP2011127460A (ja) | 給水装置 | |
| JP2014120096A (ja) | 吐出弁ユニット、及びポンプシステム | |
| JP6099387B2 (ja) | 吐出弁ユニット、及びポンプシステム | |
| JP6099386B2 (ja) | 吐出弁ユニット、及びポンプシステム | |
| JP6569713B2 (ja) | 水力発電システム | |
| JP2020143626A (ja) | 給水装置 | |
| WO2024205707A1 (en) | System and method for an in-conduit hydroturbine | |
| JP6389532B2 (ja) | ポンプおよびポンプ場設備の停止方法 | |
| JP2012072694A (ja) | タービン制御装置、ポンプ制御装置及び原子炉隔離時冷却系制御システム | |
| JP4678799B2 (ja) | 給水装置及び給水装置制御方法 | |
| JP3225222B2 (ja) | 水道用給液装置とそのポンプ制御方法 | |
| JP2923265B2 (ja) | 水道用給液装置とそのポンプ制御方法 | |
| JP2008063982A (ja) | 送水制御方法とその装置およびこれを用いた送水制御システム | |
| JP2012103086A (ja) | 原子炉水位制御システム | |
| JP3691997B2 (ja) | オゾン処理システム及び排オゾン吸い込み制御方法 | |
| JP5455877B2 (ja) | 給水装置 | |
| JP2923250B2 (ja) | 水道用給液装置とそのポンプ制御方法 | |
| KR101837700B1 (ko) | 모터의 운전속도 범위를 확장한 공기압축기용 인버터 제어장치 | |
| EP3055571A1 (en) | Method for operating a pump unit, pump unit and use thereof | |
| JP2923249B2 (ja) | 水道用給液装置 | |
| JP7659894B2 (ja) | 給水装置 | |
| WO2018131387A1 (ja) | 風力発電装置 | |
| JP2007170309A (ja) | ポンプの制御方法及び給水装置 | |
| JP2009228595A (ja) | 可変速給水ポンプ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151013 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160715 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160720 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160914 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170123 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6099386 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |