JP2013512395A - 直進運動及び回転運動が可能なセミアクティブ装置 - Google Patents
直進運動及び回転運動が可能なセミアクティブ装置 Download PDFInfo
- Publication number
- JP2013512395A JP2013512395A JP2012540403A JP2012540403A JP2013512395A JP 2013512395 A JP2013512395 A JP 2013512395A JP 2012540403 A JP2012540403 A JP 2012540403A JP 2012540403 A JP2012540403 A JP 2012540403A JP 2013512395 A JP2013512395 A JP 2013512395A
- Authority
- JP
- Japan
- Prior art keywords
- movable element
- semi
- active device
- axis
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 239000007788 liquid Substances 0.000 claims abstract description 20
- 238000007789 sealing Methods 0.000 claims description 6
- 239000011554 ferrofluid Substances 0.000 claims description 5
- 239000000565 sealant Substances 0.000 claims description 3
- 239000011553 magnetic fluid Substances 0.000 abstract description 13
- 239000000696 magnetic material Substances 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- ORQBXQOJMQIAOY-UHFFFAOYSA-N nobelium Chemical compound [No] ORQBXQOJMQIAOY-UHFFFAOYSA-N 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 238000004088 simulation Methods 0.000 description 3
- 230000004044 response Effects 0.000 description 2
- 238000010008 shearing Methods 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 239000004809 Teflon Substances 0.000 description 1
- 229920006362 Teflon® Polymers 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000011038 discontinuous diafiltration by volume reduction Methods 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000005415 magnetization Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 150000002825 nitriles Chemical class 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000001846 repelling effect Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000009827 uniform distribution Methods 0.000 description 1
Images
















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F9/00—Springs, vibration-dampers, shock-absorbers, or similarly-constructed movement-dampers using a fluid or the equivalent as damping medium
- F16F9/32—Details
- F16F9/53—Means for adjusting damping characteristics by varying fluid viscosity, e.g. electromagnetically
- F16F9/535—Magnetorheological [MR] fluid dampers
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20528—Foot operated
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Mechanical Engineering (AREA)
- Braking Arrangements (AREA)
- Fluid-Damping Devices (AREA)
- Regulating Braking Force (AREA)
- Pivots And Pivotal Connections (AREA)
Abstract
【選択図】図2
Description
−円形断面を有する少なくとも一部分を備える縦軸の該可動エレメント、
−可動エレメントが、可動エレメントの円形断面の部分を収容する縦軸のハウジングにおいて、その軸に沿う直進運動が可能であり、該軸周りの回転運動が可能であるように、ハウジングを規定するボディ、
−該環状空間における磁界発生手段、ここで、該磁界発生手段は、少なくとも一つの電磁石を含み、該少なくとも一つの電磁石が、コイルと、磁性コアとを含み、該ハウジングが、該磁性コアに直接形成される、
−該磁界発生手段の制御手段、
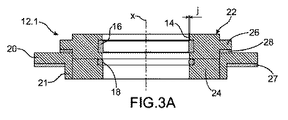
−環状スペースを閉じてシールするために、縦方向に前記ハウジングを規定する、二つの端部フランジ、ここで各フランジは、可動エレメントが、シールされた状態でスライドし回転する経路が備えられ、可動エレメントの縦方向端部が、該ハウジングの外部に配置される、
−経路に配置され、可動エレメントとの摩擦によりシールを保証するシール手段、ここで、該ハウジングは、可動エレメントと共に、シールされた環状スペースを規定する、
−該環状スペースを充填し、可動エレメントの周りに環状の層を形成する、磁性流体の液体、
−ハウジングにおける可動エレメントのガイドリング、ここで、該ガイドリングは、ハウジングに固定されるとともに、可動エレメントの円形断面の部分に接触し、該リングが環状スペースの厚みを規定する、
を含む、セミアクティブ装置に関する。
Claims (18)
- 可動エレメントの動きに対する抵抗力の発生が可能なセミアクティブ装置であって、
−円形断面を有する少なくとも一部分を備える縦軸(X)の該可動エレメント(2、102)、
−前記可動エレメント(2)が、前記可動エレメント(2)の該円形断面の部分を収容する縦軸(X)のハウジング(4)において、その軸(X)に沿う直進運動が可能であり、該軸(X)周りの回転運動が可能であるように、前記ハウジング(4)を規定するボディ、
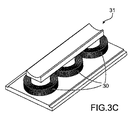
−該環状空間における磁界発生手段、ここで、該磁界発生手段は、少なくとも一つの電磁石を含み、該少なくとも一つの電磁石が、コイル(30)と磁性コア(32)とを含み、該ハウジング(4)が、該磁性コア(32)に直接形成される、
−該磁界発生手段の制御手段、
−前記環状スペース(8)を閉じてシールするために、縦方向に前記ハウジングを規定する、二つの端部フランジ(12.1、12.2)、ここで各フランジ(12.1、12.2)は、前記可動エレメント(2)が、シール状態でスライドし回転する経路が備えられ、前記可動エレメント(2)の縦方向端部(2.1、2.2)が、該ハウジング(4)の外部に配置される、
−前記経路に配置され、前記可動エレメントとの摩擦によりシールを保証するシール手段、ここで、該ハウジングは、前記可動エレメント(2)と共に、シールされた環状スペースを規定する、
−該環状スペースを充填し、前記可動エレメント(2)の周りに環状の層を形成する、磁性流体の液体、
−前記ハウジング(4)における前記可動エレメント(2)のガイドリング(16)、ここで、該ガイドリング(16)は、前記ハウジングに固定されるとともに、前記可動エレメント(2)の前記円形断面の部分に接触し、該リングが前記環状スペース(8)の厚みを規定する、
を含む、セミアクティブ装置。 - 生じた磁界が、前記可動エレメント(2)に対して半径方向に配向されるように、該コイル(30)が配向される、
請求項1に記載のセミアクティブ装置。 - 前記環状スペース(8)が、実質的に一定の厚みを有する、
請求項1または2に記載のセミアクティブ装置。 - 前記環状スペースが、200μmから2mmの間の厚みを有する、
請求項1から3のいずれか1項に記載のセミアクティブ装置。 - 前記可動エレメント(2)に対して二つずつ直径方向に対向する少なくとも一対の電磁石を含み、前記可動エレメント(2)の側方に配向された、直径方向に対向する電磁石の極が、異極性となるように、該制御手段が電流供給を制御する、
請求項1から4のいずれか1項に記載のセミアクティブ装置。 - 前記可動エレメント(2)に対して二つずつ直径方向に対向する少なくとも二対の電磁石を含む、
請求項5に記載のセミアクティブ装置。 - 前記可動エレメントの側方に配向された各電磁石の前記極が、異極性の隣り合う電磁石の二つの極により囲まれるように、該制御手段が電流供給を制御する、
請求項6に記載のセミアクティブ装置。 - 前記磁性コア(32)が、その全高に亘り、前記ハウジング(4)のコーナー部位をそれぞれ形成する湾曲面を含む、
請求項5から7のいずれか1項に記載のセミアクティブ装置。 - 前記セミアクティブ装置の前記ボディが、前記磁性コアにより直接形成される、
請求項1から8のいずれか1項に記載のセミアクティブ装置。 - 互いに固定されるコーナー部位の形態の複数の磁性コアを含む、
請求項9に記載のセミアクティブ装置。 - 前記端部フランジが、前記磁性コアの固定を保証し、前記装置の前記ボディのシールが、前記コアの外表面に配置されるシール剤により得られる、
請求項10に記載のセミアクティブ装置。 - 前記電磁石全ての前記コア(32)が、単一部品である、
請求項1から9のいずれか1項に記載のセミアクティブ装置。 - 前記電磁石のそれぞれの磁気回路の一つに配置される、少なくとも一つの永久磁石(34)を含む、
を含む請求項1から12のいずれか1項に記載のセミアクティブ装置。 - 前記可動エレメント(2)が、管である、
を含む請求項1から13のいずれか1項に記載のセミアクティブ装置。 - 請求項1から14のいずれか1項に記載のセミアクティブ装置と、前記可動エレメントが通過するアクチュエータとを含む、アクティブ装置。
- 前記アクチュエータが、前記可動エレメント(102)に対して直径方向に対向する少なくとも二つの電磁石を備えるステージ(44)と、前記可動エレメント(102)に対して直径方向に対向する少なくとも二つの電磁石を備える他のステージ(46)と、前記アクチュエータを通過し、軸方向に並ぶ異極性の二つのゾーン(Z1、Z2)を含む、前記可動エレメント(102)の部位とを含む、
請求項15に記載のアクティブ装置。 - 自動車のシステムを制御する少なくとも一つのペダル(50)と、請求項1から14のいずれか1項に記載の少なくとも一つのセミアクティブ装置(D)と、を含み、前記可動エレメントが該ペダルに連結されて、該ペダルの動きに抗する力を適用する、
自動車の制御システム。 - 操作者により取り扱われ、該操作者がコマンドを送信する、制御部材(58)、及び、請求項1から14のいずれか1項に記載の第一のセミアクティブ装置(D)と第二のセミアクティブ装置(D′)とを含み、該制御部材(58)が、前記第一のセミアクティブ装置(D)の可動エレメント(2)の一旦に取り付けられ、該エレメント(2)が、第一の軸(X)に沿って、及び、第一の軸(X)周りに可動し、該可動エレメント(2)が、前記第二のセミアクティブ装置(D′)の可動エレメント(2′)に固定され、該エレメント(2′)が、第二の軸(Y)に沿って、及び、第二の軸(Y)周りに可動し、前記第一の軸(X)と前記第二の軸(Y)とが直交し、前記制御部材(58)が、互いに直交する前記第一の軸(X)及び前記第二の軸(Y)に沿って、及び、前記第一の軸(X)及び前記第二の軸(Y)周りに可動する、制御システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0958352A FR2952985B1 (fr) | 2009-11-25 | 2009-11-25 | Dispositif semi-actif en translation et en rotation |
| FR0958352 | 2009-11-25 | ||
| PCT/EP2010/068041 WO2011064213A2 (fr) | 2009-11-25 | 2010-11-23 | Dispositif semi-actif en translation et en rotation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013512395A true JP2013512395A (ja) | 2013-04-11 |
| JP2013512395A5 JP2013512395A5 (ja) | 2013-12-19 |
Family
ID=42288694
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012540403A Ceased JP2013512395A (ja) | 2009-11-25 | 2010-11-23 | 直進運動及び回転運動が可能なセミアクティブ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20120279345A1 (ja) |
| EP (1) | EP2504607A2 (ja) |
| JP (1) | JP2013512395A (ja) |
| FR (1) | FR2952985B1 (ja) |
| WO (1) | WO2011064213A2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9016446B2 (en) * | 2012-06-20 | 2015-04-28 | GM Global Technology Operations LLC | High energy density magnetic springs using spatially modulated magnetic fields technology |
| KR101679244B1 (ko) * | 2015-05-13 | 2016-11-24 | 인하대학교 산학협력단 | 영구 자석을 이용한 mr 유체 댐퍼 |
| US11879516B2 (en) * | 2019-08-19 | 2024-01-23 | Portland State University | Variable stiffness magnetic spring |
| CN113007425B (zh) * | 2021-03-31 | 2022-11-15 | 重庆大学 | 基于电磁调节的磁流变半主动与主动一体化流量阀 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5782231U (ja) * | 1980-11-10 | 1982-05-21 | ||
| JPH02150526A (ja) * | 1988-11-29 | 1990-06-08 | Showa Electric Wire & Cable Co Ltd | 防振装置 |
| JP2001507434A (ja) * | 1997-02-24 | 2001-06-05 | ロード コーポレーション | 磁気レオロジー流体地震ダンパ |
| JP2009234323A (ja) * | 2008-03-26 | 2009-10-15 | Honda Motor Co Ltd | 車両用サスペンションシステム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5573088A (en) * | 1994-05-10 | 1996-11-12 | Daniels; John J. | Controllable resistance device and force dampener, and vehicle utilizing the same |
| US7165786B1 (en) * | 1998-12-21 | 2007-01-23 | Douglas Autotech Corporation | Non-newtonian flow fluid-locking mechanism for vehicles |
| DE102004041690A1 (de) * | 2003-08-27 | 2005-03-24 | Marquardt Gmbh | Elektrischer Schalter |
| FR2902538A1 (fr) | 2006-06-14 | 2007-12-21 | Commissariat Energie Atomique | Dispositif de simulation tactile ou haptique et clavier musical comportant au moins un tel dispositif de simulation |
| FR2930655B1 (fr) * | 2008-04-29 | 2013-02-08 | Commissariat Energie Atomique | Interface a retour d'effort a sensation amelioree |
| FR2930654B1 (fr) * | 2008-04-29 | 2013-02-08 | Commissariat Energie Atomique | Interface haptique a effort de freinage augmente |
-
2009
- 2009-11-25 FR FR0958352A patent/FR2952985B1/fr not_active Expired - Fee Related
-
2010
- 2010-11-23 WO PCT/EP2010/068041 patent/WO2011064213A2/fr active Application Filing
- 2010-11-23 EP EP10781904A patent/EP2504607A2/fr not_active Withdrawn
- 2010-11-23 JP JP2012540403A patent/JP2013512395A/ja not_active Ceased
- 2010-11-23 US US13/511,526 patent/US20120279345A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5782231U (ja) * | 1980-11-10 | 1982-05-21 | ||
| JPH02150526A (ja) * | 1988-11-29 | 1990-06-08 | Showa Electric Wire & Cable Co Ltd | 防振装置 |
| JP2001507434A (ja) * | 1997-02-24 | 2001-06-05 | ロード コーポレーション | 磁気レオロジー流体地震ダンパ |
| JP2009234323A (ja) * | 2008-03-26 | 2009-10-15 | Honda Motor Co Ltd | 車両用サスペンションシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2504607A2 (fr) | 2012-10-03 |
| FR2952985A1 (fr) | 2011-05-27 |
| WO2011064213A3 (fr) | 2012-03-08 |
| FR2952985B1 (fr) | 2012-01-13 |
| US20120279345A1 (en) | 2012-11-08 |
| WO2011064213A2 (fr) | 2011-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5750280B2 (ja) | 構造物の制振装置 | |
| JP5925672B2 (ja) | 減衰装置、及び構造物の制振装置 | |
| JP5603856B2 (ja) | 制動力を増大させた触覚インタフェース | |
| JP6568616B2 (ja) | 入力装置及び入力装置の制御方法 | |
| JP3475949B2 (ja) | リニアオシレータ | |
| CA2493603C (en) | Actuator capable of moving in axial and rotational directions | |
| JP6176702B2 (ja) | ジョイスティック装置 | |
| CN105264756A (zh) | 线性致动器 | |
| JP2013512395A (ja) | 直進運動及び回転運動が可能なセミアクティブ装置 | |
| JP6843179B2 (ja) | 空気力学的移動面を有する装置に用いるためのダンピングアッセンブリ | |
| JP3470689B2 (ja) | リニアアクチュエータ | |
| KR101341089B1 (ko) | 자기유변유체를 이용한 회전식 액추에이터 및 역감 제공 방법 | |
| EP1730417B1 (en) | System comprising magnetically actuated rotary motion control device | |
| US6028499A (en) | Monophase, short travel, electromagnetic actuator having a good electric power/force ratio | |
| Senkal et al. | Compact MR-brake with serpentine flux path for haptics applications | |
| WO2011102365A1 (ja) | 駆動装置および該駆動装置を用いた移動機構 | |
| CN105626754A (zh) | 一种基于蛇形磁路的多片旋转式磁流变液阻尼器 | |
| KR101353958B1 (ko) | 자기유변유체식 브레이크를 이용한 회전식 액추에이터 및 자기유변유체의 멀티 작동 모드를 이용한 회전식 액추에이터 구동 방법 | |
| JP5337807B2 (ja) | より高い剛性を提供可能な緩衝装置 | |
| JP6649373B2 (ja) | 無負荷トルクを低減した触覚インタフェースのための装置 | |
| CN105099062A (zh) | 自驱动转动轴 | |
| JP2013512395A5 (ja) | ||
| JP2005524809A (ja) | 磁気作動運動制御装置 | |
| US9109650B2 (en) | Linear MR-brake as a high force and low off-state friction actuator | |
| Topçu et al. | Modeling and experimental evaluation of a rotary peristaltic magnetorheological fluid device with low off-state torque for haptic interfaces |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131030 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131030 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140520 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140729 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140917 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150224 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20150630 |