JP2013192063A - 画像処理方法および装置 - Google Patents
画像処理方法および装置 Download PDFInfo
- Publication number
- JP2013192063A JP2013192063A JP2012057138A JP2012057138A JP2013192063A JP 2013192063 A JP2013192063 A JP 2013192063A JP 2012057138 A JP2012057138 A JP 2012057138A JP 2012057138 A JP2012057138 A JP 2012057138A JP 2013192063 A JP2013192063 A JP 2013192063A
- Authority
- JP
- Japan
- Prior art keywords
- luminance
- image processing
- centroid
- information
- fiber
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003672 processing method Methods 0.000 title claims abstract description 17
- 239000000835 fiber Substances 0.000 claims abstract description 156
- 230000003287 optical effect Effects 0.000 claims abstract description 10
- 239000000284 extract Substances 0.000 claims abstract description 4
- 238000004364 calculation method Methods 0.000 claims description 51
- 230000005484 gravity Effects 0.000 claims description 15
- 238000000605 extraction Methods 0.000 claims description 11
- 238000000034 method Methods 0.000 claims description 11
- 230000002093 peripheral effect Effects 0.000 claims description 3
- 238000003384 imaging method Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 238000005253 cladding Methods 0.000 description 3
- 238000013500 data storage Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 238000002372 labelling Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 230000001066 destructive effect Effects 0.000 description 1
- 239000013305 flexible fiber Substances 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
Images









Landscapes
- Studio Devices (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Abstract
【解決手段】複数のファイバが束ねられたファイバ束3と、該ファイバ束により伝達される光情報を電気信号に変換する画素が2次元配列されたCCDセンサ13とにより、輝度情報を非連続に取得する画像取得部が構成される。画像処理装置25は、輝度情報を有する複数の画素領域を抽出し、抽出した複数の画素領域の輝度重心位置および重心輝度値を算出し、算出した輝度重心位置および重心輝度値を用いて、輝度情報を持たない画素領域に亘る等方輝度分布情報を計算し、複数の等方輝度分布情報を加算し輝度情報を復元する。
【選択図】図4
Description
かかる構成により、離散的にしか情報を持たない撮像画像から、連続的な輝度分布情報を復元できるものとなる。
最初に、図1及び図2を用いて、本発明の一実施形態による画像処理装置の基本構成について説明する。
図1は、本発明の一実施形態による画像処理装置の基本構成を示す斜視図である。図2は、本発明の一実施形態による画像処理装置に用いるファイバの構成を示す斜視図である。
図3は、ファイバを通して観測した物体面の輝度分布の説明図である。
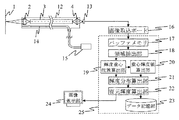
図4は、本発明の一実施形態による画像処理装置の詳細構成を示すブロック図である。なお、図1と同一符号は、同一部分を示している。
図5及び図6は、本発明の一実施形態による画像処理装置に用いる領域抽出部の動作説明図である。
図7は、本発明の一実施形態による画像処理装置に用いる輝度重心位置算出部と重心輝度値算出部の動作説明図である。
X=(Σ(Ki×xi)/ΣKi) …(1)
求められたX方向の輝度重心位置をY方向で平均化し、輝度重心のX座標とする。同様に、ある画素列XにおけるY方向の輝度重心位置を以下の式(2)で算出する。
Y=(Σ(Ki×yi)/ΣKi) …(2)
求められたY方向の輝度重心位置をX方向で平均化し、輝度重心のY座標とする。以上の方法により、輝度重心位置算出部19は、非連続な輝度情報から輝度重心位置を算出する。
図8は、本発明の一実施形態による画像処理装置に用いる輝度分布算出部の動作説明図である。
f(x)=E・exp(−(x−X)2/2σ2) …(3)
ここで、半値幅が隣接する輝度重心位置の画素までの距離の半分となるように広がりσを定数倍(α倍)し、輝度分布を次の式(4)とする。
f(x)=E・exp(−(x−X)2/2(α・σ)2) …(4)
これにより、重心輝度値を含む画素の輝度値、すなわち、ファイバコア部中心の輝度値を、実際の物体面の輝度値のまま保持し、輝度情報を持たない画素に亘って輝度分布(図8に一点鎖線で示す輝度分布)を復元できる。また、分布は、輝度重心位置から距離に応じて減衰する等方的な分布とし、例えば二次元正規分布とする。なお、計算する輝度分布を求める方法は、本実施例で記載した正規分布を用いた計算方法に限らず、例えば、隣接する重心輝度位置にかかる分布としたり、輝度分布を距離に応じて線形に変化させるものとしたりしても良い。また、定数倍(α倍)については、必ずしも、半値幅が隣接する輝度重心位置の画素までの距離の半分とせず、このαの辺りよりも大きい値、または、小さい値を用いる事もできる。
図9は、本発明の一実施形態による画像処理装置に用いる復元輝度算出部の動作説明図である。
f1(x)=E・exp(−(x−X)2/2(α・σ)2) …(5)
f2(x)=E・exp(−(x−X)2/2(β・σ)2) …(6)
ここで、拡がり定数αと、拡がり定数βとの関係は、以下の式(7)とする。
β=((B’+B”)/(A’+A”))・α …(7)
例えば、傷などの方向性を有するものがある場合、その方向において、輝度が高くなったり、または低くなったりする。高くなるか低くなるかは、光の当たり具合によって異なる。例えば、その傷において光が反射するように光が当たると、輝度が高くなる。また、その傷が陰になるように光が当たると、輝度が低くなる。
2…対物レンズ
3…ファイバ束
4…結像レンズ
5…センサ面
6…ファイバクラッド部
7…ファイバコア部
12…ファイバスコープ
13…CCDセンサ
14…ライトガイドファイバ
15…光源装置
16…画像取込ボード
17…バッファメモリ
18…領域抽出部
19…輝度重心位置算出部
20…重心輝度算出部
21…輝度分布算出部
22…復元輝度算出部
23…データ記憶手段
24…画像表示部
25…画像処理装置
Claims (14)
- 輝度情報を非連続に取得する画像取得部と、画像処理部とを有する画像処理装置であって、
前記画像処理部は、輝度情報を有する複数の画素領域を抽出し、抽出した複数の画素領域の輝度重心位置および重心輝度値を算出し、算出した輝度重心位置および重心輝度値を用いて、輝度情報を持たない画素領域に亘る等方輝度分布情報を計算し、複数の等方輝度分布情報を加算し輝度情報を復元することを特徴とする画像処理装置。 - 請求項1記載の画像処理装置において、
前記画像取得部は、複数のファイバが束ねられたファイバ束と、該ファイバ束により伝達される光情報を電気信号に変換する画素が2次元配列された光検出器とから構成されることを特徴とする画像処理装置。 - 請求項2記載の画像処理装置において、
前記画像処理部は、
前記画像取得部により取得された画像データに対して、前記ファイバ束を構成する単一ファイバごとの画素領域に分割する領域抽出部と、
該領域抽出部によって分割された各画素領域の輝度重心位置を算出する輝度重心位置算出部と、
該輝度重心位置算出部によって算出された重心位置での輝度値を算出する重心輝度値算出部と、
前記輝度重心位置算出部によって算出された重心位置及び前記重心輝度値算出部によって算出された輝度値とから、重心位置を中心とした前記単一ファイバごとの復元輝度分布を算出する輝度分布算出部と、
該輝度分布算出部によって算出された単一ファイバごとの復元輝度分布から、全画素の復元輝度値を算出する復元輝度算出部とを備えることを特徴とする画像処理装置。 - 請求項3記載の画像処理装置において、
前記ファイバ束を構成する単一ファイバのピッチに対して、対応する前記光検出器の画素のピッチが半分以下であることを特徴とする画像処理装置。 - 請求項4記載の画像処理装置において、
前記ファイバ束を構成する単一ファイバは、光情報を伝達するファイバコア部と、該ファイバコア部の外殻を覆うファイバクラッド部とから構成され、
前記単一ファイバに対して、前記光検出器の複数の画素が対応するとともに、
前記ファイバコア部の中心と、前記複数の画素のうちの一つの画素の中心が一致するように、前記ファイバ束と前記光検出器とが位置付けられていることを特徴とする画像処理装置。 - 請求項1記載の画像処理装置において、
前記画像処理部は、周辺画素の重心輝度値に応じ、方向を持たせて重み付けをした輝度情報を分布させることを特徴とする画像処理装置。 - 請求項6記載の画像処理装置において、
前記画像取得部は、複数のファイバが束ねられたファイバ束と、該ファイバ束により伝達される光情報を電気信号に変換する画素が2次元配列された光検出器とから構成され、
前記画像処理部は、隣接する輝度重心位置の重心輝度値情報から、高い重心輝度値を持つ輝度重心位置方向により高い重みを付けた輝度分布とすることを特徴とする画像処理装置。 - 輝度情報を非連続に画像取得し、画像処理を行う画像処理方法であって、
画像処理段階においては、輝度情報を有する複数の画素領域を抽出し、抽出した複数の画素領域の輝度重心位置および重心輝度値を算出し、算出した輝度重心位置および重心輝度値を用いて、輝度情報を持たない画素領域に亘る等方輝度分布情報を計算し、複数の等方輝度分布情報を加算し輝度情報を復元することを特徴とする画像処理方法。 - 請求項8記載の画像処理方法において、
画像取得には、複数のファイバが束ねられたファイバ束と、該ファイバ束により伝達される光情報を電気信号に変換する画素が2次元配列された光検出器を用いることを特徴とする画像処理方法。 - 請求項9記載の画像処理方法において、
画像処理段階においては、
取得された画像データに対して、前記ファイバ束を構成する単一ファイバごとの画素領域に分割し、
分割された各画素領域の輝度重心位置を算出し、
算出された輝度重心位置での輝度値を算出し、
算出された輝度重心位置及び輝度値から、重心位置を中心とした前記単一ファイバごとの復元輝度分布を算出し、
算出された単一ファイバごとの復元輝度分布から、全画素の復元輝度値を算出することを特徴とする画像処理方法。 - 請求項10記載の画像処理方法において、
ファイバ束を構成する単一ファイバのピッチに対応する画素ピッチが半分以下である光検出器を用いることを特徴とする画像処理装置。 - 請求項11記載の画像処理方法において、
前記ファイバ束を構成する単一ファイバは、光情報を伝達するファイバコア部と、該ファイバコア部の外殻を覆うファイバクラッド部とから構成され、
前記単一ファイバに対して、前記光検出器の複数の画素が対応するとともに、
前記ファイバコア部の中心と前記複数の画素のうちの一つの画素の中心が一致するように位置付けられた前記ファイバ束と前記光検出器とを用いることを特徴とする画像処理方法。 - 請求項8記載の画像処理方法において、
画像処理段階において、周辺画素の重心輝度値に応じ、方向を持たせて重み付けをした輝度情報を分布させることを特徴とする画像処理方法。 - 請求項13記載の画像処理方法において、
画像取得段階においては、複数のファイバが束ねられたファイバ束と、該ファイバ束により伝達される光情報を電気信号に変換する画素が2次元配列された光検出器とを用い、
画像処理段階においては、隣接する輝度重心位置の重心輝度値情報から、高い重心輝度値を持つ輝度重心位置方向により高い重みを付けた輝度分布とすることを特徴とする画像処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012057138A JP5951293B2 (ja) | 2012-03-14 | 2012-03-14 | 画像処理方法および装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012057138A JP5951293B2 (ja) | 2012-03-14 | 2012-03-14 | 画像処理方法および装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013192063A true JP2013192063A (ja) | 2013-09-26 |
| JP5951293B2 JP5951293B2 (ja) | 2016-07-13 |
Family
ID=49391903
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012057138A Active JP5951293B2 (ja) | 2012-03-14 | 2012-03-14 | 画像処理方法および装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5951293B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107621463A (zh) * | 2017-10-16 | 2018-01-23 | 南京亘瑞医疗科技有限公司 | 图像重建方法、装置及显微成像装置 |
| JP2021511871A (ja) * | 2018-01-29 | 2021-05-13 | ロイヤル・メルボルン・インスティテュート・オブ・テクノロジーRoyal Melbourne Institute Of Technology | マルチコアファイバイメージング |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5810032A (ja) * | 1981-07-09 | 1983-01-20 | オリンパス光学工業株式会社 | 内視鏡 |
| JPH04138127A (ja) * | 1990-09-28 | 1992-05-12 | Olympus Optical Co Ltd | 内視鏡網目画像軽減装置 |
| JP2010253156A (ja) * | 2009-04-28 | 2010-11-11 | Fujifilm Corp | 内視鏡システム、内視鏡、並びに内視鏡駆動方法 |
-
2012
- 2012-03-14 JP JP2012057138A patent/JP5951293B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5810032A (ja) * | 1981-07-09 | 1983-01-20 | オリンパス光学工業株式会社 | 内視鏡 |
| JPH04138127A (ja) * | 1990-09-28 | 1992-05-12 | Olympus Optical Co Ltd | 内視鏡網目画像軽減装置 |
| JP2010253156A (ja) * | 2009-04-28 | 2010-11-11 | Fujifilm Corp | 内視鏡システム、内視鏡、並びに内視鏡駆動方法 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107621463A (zh) * | 2017-10-16 | 2018-01-23 | 南京亘瑞医疗科技有限公司 | 图像重建方法、装置及显微成像装置 |
| KR20200070313A (ko) * | 2017-10-16 | 2020-06-17 | 수저우 마이크로뷰 메디칼 테크놀로지스 컴퍼니 리미티드 | 이미지 재건 방법, 장치 및 현미 이미징 장치 |
| EP3699576A4 (en) * | 2017-10-16 | 2020-11-25 | Suzhou Microview Medical Technologies Co., Ltd. | IMAGE RECONSTRUCTION METHOD AND DEVICE, AND MICROSCOPE IMAGING DEVICE |
| JP2020537162A (ja) * | 2017-10-16 | 2020-12-17 | 蘇州微景医学科技有限公司Suzhou Microview Medical Technologies Co.,Ltd. | 画像再構成方法、装置及び顕微結像装置 |
| AU2018352821B2 (en) * | 2017-10-16 | 2021-09-16 | Suzhou Microview Medical Technologies Co., Ltd. | Image reconstruction method, device and microscopic imaging device |
| KR102358848B1 (ko) * | 2017-10-16 | 2022-02-08 | 수저우 마이크로뷰 메디칼 테크놀로지스 컴퍼니 리미티드 | 이미지 재건 방법, 장치 및 현미 이미징 장치 |
| JP7064796B2 (ja) | 2017-10-16 | 2022-05-11 | 蘇州微景医学科技有限公司 | 画像再構成方法、装置及び顕微結像装置 |
| US11449964B2 (en) | 2017-10-16 | 2022-09-20 | Suzhou Microview Medical Technologies Co., Ltd. | Image reconstruction method, device and microscopic imaging device |
| CN107621463B (zh) * | 2017-10-16 | 2024-03-22 | 苏州微景医学科技有限公司 | 图像重建方法、装置及显微成像装置 |
| JP2021511871A (ja) * | 2018-01-29 | 2021-05-13 | ロイヤル・メルボルン・インスティテュート・オブ・テクノロジーRoyal Melbourne Institute Of Technology | マルチコアファイバイメージング |
| US11684240B2 (en) | 2018-01-29 | 2023-06-27 | Royal Melbourne Institute Of Technology | Multicore fiber imaging |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5951293B2 (ja) | 2016-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6855587B2 (ja) | 視点から距離情報を取得するための装置及び方法 | |
| JP5808502B2 (ja) | 画像生成装置 | |
| CN110108348B (zh) | 基于运动放大光流跟踪的薄壁件微幅振动测量方法及系统 | |
| US9412189B2 (en) | Method and system for detecting known measurable object features | |
| US10334216B2 (en) | Imaging system including lens with longitudinal chromatic aberration, endoscope and imaging method | |
| CN106524909B (zh) | 三维图像采集方法及装置 | |
| JP2011185872A (ja) | 情報処理装置、その処理方法及びプログラム | |
| JP2015132953A (ja) | 画像処理装置およびその方法 | |
| JP2017150878A5 (ja) | ||
| US20150369589A1 (en) | Positional shift amount measurement method, correction table generation apparatus, imaging apparatus, and projecting apparatus | |
| JP2012155624A5 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP5951293B2 (ja) | 画像処理方法および装置 | |
| JP2018082424A (ja) | 画像形成装置 | |
| CN116670713A (zh) | 使用基于核线所选择的候选图像进行深度感测的方法 | |
| EP4379655A3 (en) | Multicore fiber imaging | |
| TWI408611B (zh) | 利用物件特徵相異性進行多個物件之動態影像辨識方法及使用該方法之系統 | |
| EP2385698A3 (en) | Imaging apparatus, imaging method, and imaging program | |
| JP5503573B2 (ja) | 撮像装置および画像処理情報生成プログラム | |
| KR101792343B1 (ko) | 마이크로 렌즈 어레이를 이용한 매트릭스 광원 패턴 조사 적외선 프로젝터 모듈 및 이를 이용한 3차원 스캐너 | |
| JP2017224108A5 (ja) | ||
| JP2017208706A5 (ja) | ||
| EP2475164A3 (en) | Passive radiometric imaging device and method | |
| JP2022106868A5 (ja) | ||
| JP6391281B2 (ja) | 光学検査方法、光学検査装置、および光学部材の製造方法 | |
| JP4885471B2 (ja) | プリフォームロッドの屈折率分布測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140904 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20140904 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150619 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150728 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160315 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160401 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160608 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5951293 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |