JP6855587B2 - 視点から距離情報を取得するための装置及び方法 - Google Patents
視点から距離情報を取得するための装置及び方法 Download PDFInfo
- Publication number
- JP6855587B2 JP6855587B2 JP2019541848A JP2019541848A JP6855587B2 JP 6855587 B2 JP6855587 B2 JP 6855587B2 JP 2019541848 A JP2019541848 A JP 2019541848A JP 2019541848 A JP2019541848 A JP 2019541848A JP 6855587 B2 JP6855587 B2 JP 6855587B2
- Authority
- JP
- Japan
- Prior art keywords
- epipolar
- image
- pixels
- depth
- line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 89
- 238000004422 calculation algorithm Methods 0.000 claims description 17
- 238000012545 processing Methods 0.000 claims description 14
- 238000004458 analytical method Methods 0.000 claims description 9
- 238000003708 edge detection Methods 0.000 claims description 7
- 238000004590 computer program Methods 0.000 claims description 4
- 238000001514 detection method Methods 0.000 claims description 3
- 230000000877 morphologic effect Effects 0.000 claims description 3
- 238000010801 machine learning Methods 0.000 claims description 2
- 230000008569 process Effects 0.000 description 21
- 238000012417 linear regression Methods 0.000 description 16
- 239000011159 matrix material Substances 0.000 description 16
- 238000004364 calculation method Methods 0.000 description 12
- 230000004075 alteration Effects 0.000 description 10
- 238000006243 chemical reaction Methods 0.000 description 7
- 238000013459 approach Methods 0.000 description 5
- 238000005286 illumination Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 238000012804 iterative process Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 101150006217 lex1 gene Proteins 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000001594 aberrant effect Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000013473 artificial intelligence Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000002028 premature Effects 0.000 description 1
- 238000011002 quantification Methods 0.000 description 1
- 238000013139 quantization Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000000638 solvent extraction Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images





























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/557—Depth or shape recovery from multiple images from light fields, e.g. from plenoptic cameras
-
- G06T5/70—
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/13—Edge detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/155—Segmentation; Edge detection involving morphological operators
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2200/00—Indexing scheme for image data processing or generation, in general
- G06T2200/28—Indexing scheme for image data processing or generation, in general involving image processing hardware
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
- G06T2207/10012—Stereo images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10052—Images from lightfield camera
Description
本発明の説明のために、定義を以下に考察する。

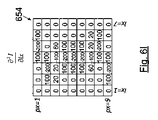
ステップ1
上側の隣接位置(lx、px−1)、(lx+1、px−1)、(lx−1、px−1)においてエッジ画素731としてラベル付けされた画素の検索:エッジ画素B(エッジ画素Aから始まる第1反復)およびエッジ画素K(エッジ画素Jから始まる第1反復)が見出される。
ステップ2
エッジ画素731が見つかった場合、lxおよびpxを新しいエッジ画素731の座標(エッジ画素Aから始まる最初の反復におけるエッジ画素Bの座標:lx=4、px=4;エッジ画素Jから始まる最初の反復におけるエッジ画素Kの座標:lx=8、px=4)で更新し、ステップ1(次に見つかったエッジ画素:エッジ画素Aから反復する際のエッジ画素D、FおよびH;エッジ画素Jから反復する際のエッジ画素MおよびO。エッジ画素Qは、エッジ画素Oに対してlx+2に位置するので、エピポーラ線の一部とはみなされない)を繰り返す。そうでなければ、ステップ3に進む。
ステップ3
下側の隣接位置(lx,px+1)、(lx+1,px+1)、(lx−1,px+1)におけるエッジとしてラベル付けされる画素の検索:エッジ画素C(反復がエッジ画素Aから開始するとき)及びエッジ画素L(エッジ画素Jから反復するとき)。
ステップ4
エッジ画素731が見つかった場合、lxおよびpxを新しいエッジ画素731の座標(エッジ画素Aから始まる最初の反復におけるエッジ画素C:lx=4、px=6;エッジ画素Jから始まる最初の反復におけるエッジ画素L:lx=8、px=6)で更新し、ステップ3(見つかった次のエッジ画素:エッジ画素Aから反復する際のエッジ画素E、GおよびI;エッジ画素Jから反復する際のエッジ画素NおよびP。エッジ画素Rは、エッジ画素Pに対してlx−2に位置するので、エッジ画素Rはエピポーラ線の一部とはみなされない)を繰り返す。そうでなければ、次のステップに進む。
Claims (15)
- ライトフィールドから深度情報を取得する方法であって、
ライトフィールド取得装置によって捕捉されたライトフィールドから複数のエピポーラ画像を生成するステップと、
前記エピポーラ画像において、前記ライトフィールド取得装置によって捕捉されたシーン内の対象のエッジに対応するエッジ画素を検出するためのエッジ検出ステップと、
各エピポーラ画像において、1組のエッジ画素によって形成される有効なエピポーラ線を検出するステップであって、前記有効なエピポーラ線を形成する全ての前記エッジ画素は接続されており、前記有効なエピポーラ線は一貫した方向を形成する、ステップと、
前記有効なエピポーラ線の勾配を決定するステップと、を含む方法。 - 前記エッジ検出ステップは、前記エピポーラ画像の各ピクセルについて空間二次導関数を計算するステップと、前記空間二次導関数のゼロ交差を検出するステップとを含む、請求項1に記載の方法。
- 勾配マップおよび深度マップの少なくとも何れかの前記生成を含む方法であって、前記ゼロ交差において得られるサブ画素の精度を使用することによって、前記勾配マップおよび深度マップの少なくとも何れかの位置の数が、マイクロレンズの前記数よりも多い、請求項2に記載の方法。
- 前記有効なエピポーラ線の前記勾配を決定する前記ステップは、前記検出されたエッジ画素に適合する線を適用するステップを含む、請求項1から3の何れか1項に記載の方法。
- エピポーラ画像における有効なエピポーラ線の前記検出は、接続されたエッジ画素のセットとしてエピポーラ線を決定するステップと、前記エピポーラ線が有効であるか否かを決定するために前記エピポーラ線を分析するステップとを含む、請求項1から4のいずれか1項に記載の方法。
- 前記エピポーラ線が有効であるか否かを決定するための前記エピポーラ線の前記分析は、所定の閾値を超える前記エピポーラ線を形成する画素の数をチェックするステップを含む、請求項5に記載の方法。
- 前記エピポーラ線を形成する画素の前記数は、対応するエピポーラ画像の高さの画素の前記数に少なくとも等しくなければならない、請求項6に記載の方法。
- 前記エピポーラ線が有効であるか否かを決定するための前記エピポーラ線の前記分析は、形態素解析、発見的方法、および機械学習アルゴリズムのいずれかを含む、請求項5に記載の方法。
- 前記エピポーラ線の前記分析は、前記エピポーラ画像の上部および下部の少なくとも何れかの、1つ以上の端の画素を無視するステップを含む、請求項6〜8の何れか1項に記載の方法。
- 端の画素が、前記エピポーラ線を形成する残りのエッジ画素と同じ方向に示さないときは、前記端の画素は廃棄される、先行する請求項9に記載の方法。
- 同じ位置について水平エピポーラ画像および垂直エピポーラ画像の異なる有効なエピポーラ線から得られた冗長勾配または深度の組み合わせから単一の勾配または深度マップを生成するステップをさらに含む、請求項1から10の何れか1項に記載の方法。
- 請求項1〜11のいずれか1項に記載の方法のステップを実行するように構成された処理手段を備える、ライトフィールドから深度マップを生成するための装置。
- ライトフィールド取得装置を備える、請求項12に記載の装置。
- プロセッサによって実行されると、請求項1〜11のいずれか1項に記載の方法をプロセッサに実行させるコンピュータコード命令を含む、プレノプティックカメラによって捕捉された画像から深度マップを生成するためのコンピュータプログラム製品。
- 前記コンピュータコード命令を記録した少なくとも1つのコンピュータ可読記憶媒体を備える、請求項14に記載のコンピュータプログラム製品。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2016/074992 WO2018072817A1 (en) | 2016-10-18 | 2016-10-18 | A device and method for obtaining distance information from views |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020503817A JP2020503817A (ja) | 2020-01-30 |
| JP6855587B2 true JP6855587B2 (ja) | 2021-04-07 |
Family
ID=57184433
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019541848A Active JP6855587B2 (ja) | 2016-10-18 | 2016-10-18 | 視点から距離情報を取得するための装置及び方法 |
| JP2019541849A Active JP7043085B2 (ja) | 2016-10-18 | 2016-12-20 | 視点から距離情報を取得するための装置及び方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019541849A Active JP7043085B2 (ja) | 2016-10-18 | 2016-12-20 | 視点から距離情報を取得するための装置及び方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US11423562B2 (ja) |
| EP (2) | EP3516625B8 (ja) |
| JP (2) | JP6855587B2 (ja) |
| KR (2) | KR20190065432A (ja) |
| CN (2) | CN109997170B (ja) |
| CA (2) | CA3040002C (ja) |
| ES (2) | ES2866975T3 (ja) |
| IL (2) | IL266041B (ja) |
| WO (2) | WO2018072817A1 (ja) |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10679370B2 (en) * | 2015-02-13 | 2020-06-09 | Carnegie Mellon University | Energy optimized imaging system with 360 degree field-of-view |
| US11493634B2 (en) | 2015-02-13 | 2022-11-08 | Carnegie Mellon University | Programmable light curtains |
| US11747135B2 (en) * | 2015-02-13 | 2023-09-05 | Carnegie Mellon University | Energy optimized imaging system with synchronized dynamic control of directable beam light source and reconfigurably masked photo-sensor |
| US11425357B2 (en) | 2015-02-13 | 2022-08-23 | Carnegie Mellon University | Method for epipolar time of flight imaging |
| FR3051584B1 (fr) * | 2016-05-20 | 2019-11-01 | Safran | Procede de reconstruction tridimensionnelle a l'aide d'une camera plenoptique. |
| WO2018046617A1 (en) * | 2016-09-07 | 2018-03-15 | Starship Technologies Oü | Method and system for calibrating multiple cameras |
| US10430994B1 (en) | 2016-11-07 | 2019-10-01 | Henry Harlyn Baker | Techniques for determining a three-dimensional textured representation of a surface of an object from a set of images with varying formats |
| US11652978B2 (en) * | 2017-01-05 | 2023-05-16 | Eys3D Microelectronics, Co. | Depth map generation device |
| EP3416371A1 (en) * | 2017-06-12 | 2018-12-19 | Thomson Licensing | Method for displaying, on a 2d display device, a content derived from light field data |
| EP3416381A1 (en) | 2017-06-12 | 2018-12-19 | Thomson Licensing | Method and apparatus for providing information to a user observing a multi view content |
| US11393114B1 (en) * | 2017-11-08 | 2022-07-19 | AI Incorporated | Method and system for collaborative construction of a map |
| EP3486606A1 (de) * | 2017-11-20 | 2019-05-22 | Leica Geosystems AG | Stereokamera und stereophotogrammetrisches verfahren |
| CN110390645B (zh) | 2018-04-23 | 2024-04-16 | 康耐视公司 | 用于立体瞬时图像序列的改善3d数据重构的系统和方法 |
| EP3572971B1 (de) * | 2018-05-22 | 2021-02-24 | Sick Ag | Absichern eines überwachungsbereichs mit mindestens einer maschine |
| EP3598390A1 (en) * | 2018-07-19 | 2020-01-22 | Thomson Licensing | Method for estimating a depth for pixels, corresponding device and computer program product |
| US11440744B2 (en) | 2018-07-30 | 2022-09-13 | Laitram, L.L.C. | Conveyor package-flow measuring system |
| CN109344818B (zh) * | 2018-09-28 | 2020-04-14 | 合肥工业大学 | 一种基于深度卷积网络的光场显著目标检测方法 |
| KR20200067020A (ko) * | 2018-12-03 | 2020-06-11 | 삼성전자주식회사 | 캘리브레이션 방법 및 장치 |
| KR102606835B1 (ko) * | 2019-02-20 | 2023-11-29 | 삼성전자주식회사 | 뎁스 맵을 생성하는 전자 장치 및 방법 |
| CN111862098B (zh) * | 2019-04-30 | 2023-11-24 | 曜科智能科技(上海)有限公司 | 基于光场语义的个体匹配方法、装置、设备和介质 |
| CN112446909B (zh) * | 2019-08-30 | 2022-02-01 | 上海商汤临港智能科技有限公司 | 一种深度图像补全方法及装置、计算机可读存储介质 |
| CN110827343B (zh) * | 2019-11-06 | 2024-01-26 | 太原科技大学 | 基于能量增强散焦响应的改进光场深度估计方法 |
| CN112907701B (zh) * | 2019-11-19 | 2022-08-05 | 杭州海康威视数字技术股份有限公司 | 获取图像的方法、装置、计算机设备和存储介质 |
| JP2023511670A (ja) * | 2020-01-21 | 2023-03-22 | プロプリオ インコーポレイテッド | 多視点カメラシステムからのデータを用いるなどで深度センサからの深度データを増強する方法及びシステム |
| CN112750156B (zh) * | 2020-03-16 | 2022-09-09 | 奕目(上海)科技有限公司 | 光场成像系统、处理方法和装置 |
| CN111724373A (zh) * | 2020-06-22 | 2020-09-29 | 江西财经大学 | 一种基于感知加密光场图像的视觉安全性度量方法 |
| KR20220010297A (ko) | 2020-07-17 | 2022-01-25 | 에스케이하이닉스 주식회사 | 엣지 기반 샤프니스 세기 제어 회로, 이미지 센싱 장치 및 그 동작방법 |
| CN111986086B (zh) * | 2020-08-27 | 2021-11-09 | 贝壳找房(北京)科技有限公司 | 三维图像优化生成方法及系统 |
| CN112595238B (zh) * | 2020-11-25 | 2022-09-27 | 四川云盾光电科技有限公司 | 一种高低速兼容直线位移增量精密测量方法 |
| KR20220170090A (ko) * | 2021-06-22 | 2022-12-29 | 에스케이하이닉스 주식회사 | 멀티-뷰 이미지에서 노이즈 감소를 위한 장치 및 방법 |
| CN114897952B (zh) * | 2022-05-30 | 2023-04-04 | 中国测绘科学研究院 | 一种自适应遮挡的单张光场影像准确深度估计方法及系统 |
| CN115359105B (zh) * | 2022-08-01 | 2023-08-11 | 荣耀终端有限公司 | 景深扩展图像生成方法、设备及存储介质 |
| CN117308967B (zh) * | 2023-11-30 | 2024-02-02 | 中船(北京)智能装备科技有限公司 | 一种目标对象位置信息的确定方法、装置及设备 |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2941139B2 (ja) * | 1993-03-11 | 1999-08-25 | 凸版印刷株式会社 | 視差画像作成方法および装置 |
| JP3275010B2 (ja) * | 1995-02-03 | 2002-04-15 | ザ・リジェンツ・オブ・ザ・ユニバーシティ・オブ・コロラド | 拡大された被写界深度を有する光学システム |
| US6009188A (en) * | 1996-02-16 | 1999-12-28 | Microsoft Corporation | Method and system for digital plenoptic imaging |
| US6201899B1 (en) * | 1998-10-09 | 2001-03-13 | Sarnoff Corporation | Method and apparatus for extended depth of field imaging |
| JP2004037657A (ja) * | 2002-07-01 | 2004-02-05 | Olympus Corp | 広角測距視野カメラ |
| CA2511040A1 (en) * | 2004-09-23 | 2006-03-23 | The Governors Of The University Of Alberta | Method and system for real time image rendering |
| KR101075047B1 (ko) * | 2005-06-03 | 2011-10-19 | 미디어팟 엘엘씨 | 다차원 이미징 시스템 및 방법 |
| US7620309B2 (en) * | 2006-04-04 | 2009-11-17 | Adobe Systems, Incorporated | Plenoptic camera |
| US8090194B2 (en) * | 2006-11-21 | 2012-01-03 | Mantis Vision Ltd. | 3D geometric modeling and motion capture using both single and dual imaging |
| US8538166B2 (en) * | 2006-11-21 | 2013-09-17 | Mantisvision Ltd. | 3D geometric modeling and 3D video content creation |
| US7769205B2 (en) * | 2006-11-28 | 2010-08-03 | Prefixa International Inc. | Fast three dimensional recovery method and apparatus |
| US8290358B1 (en) * | 2007-06-25 | 2012-10-16 | Adobe Systems Incorporated | Methods and apparatus for light-field imaging |
| JP4856611B2 (ja) * | 2007-10-29 | 2012-01-18 | 富士重工業株式会社 | 物体検出装置 |
| US7949252B1 (en) * | 2008-12-11 | 2011-05-24 | Adobe Systems Incorporated | Plenoptic camera with large depth of field |
| US8938099B2 (en) * | 2010-12-15 | 2015-01-20 | Canon Kabushiki Kaisha | Image processing apparatus, method of controlling the same, distance measurement apparatus, and storage medium |
| US9607424B2 (en) * | 2012-06-26 | 2017-03-28 | Lytro, Inc. | Depth-assigned content for depth-enhanced pictures |
| EP2888720B1 (en) * | 2012-08-21 | 2021-03-17 | FotoNation Limited | System and method for depth estimation from images captured using array cameras |
| GB201302694D0 (en) * | 2013-02-15 | 2013-04-03 | Oxford Instr Nanotechnology Tools Ltd | Method of electron beam diffraction analysis |
| US9374512B2 (en) * | 2013-02-24 | 2016-06-21 | Pelican Imaging Corporation | Thin form factor computational array cameras and modular array cameras |
| US9786062B2 (en) * | 2013-05-06 | 2017-10-10 | Disney Enterprises, Inc. | Scene reconstruction from high spatio-angular resolution light fields |
| GB2529344A (en) * | 2013-06-12 | 2016-02-17 | Vidinoti Sa | Method and apparatus for identifying local features |
| US9451162B2 (en) * | 2013-08-21 | 2016-09-20 | Jaunt Inc. | Camera array including camera modules |
| JP6026979B2 (ja) * | 2013-09-06 | 2016-11-16 | 日本電信電話株式会社 | 画像処理装置、画像処理方法及び画像処理プログラム |
| JP6462671B2 (ja) * | 2013-10-03 | 2019-01-30 | ユニバーシティー オブ デラウェア | Xスリットカメラ |
| JP6114229B2 (ja) * | 2014-04-28 | 2017-04-12 | 日本電信電話株式会社 | 画像生成装置及び画像生成プログラム |
| US8988317B1 (en) * | 2014-06-12 | 2015-03-24 | Lytro, Inc. | Depth determination for light field images |
| US10008027B1 (en) * | 2014-10-20 | 2018-06-26 | Henry Harlyn Baker | Techniques for determining a three-dimensional representation of a surface of an object from a set of images |
| US9292926B1 (en) * | 2014-11-24 | 2016-03-22 | Adobe Systems Incorporated | Depth map generation |
| CN104598744B (zh) * | 2015-01-27 | 2017-11-21 | 北京工业大学 | 一种基于光场的深度估计方法 |
| US9661308B1 (en) * | 2015-04-20 | 2017-05-23 | Samsung Electronics Co., Ltd. | Increasing tolerance of sensor-scanner misalignment of the 3D camera with epipolar line laser point scanning |
| CN104851089A (zh) * | 2015-04-28 | 2015-08-19 | 中国人民解放军国防科学技术大学 | 一种基于三维光场的静态场景前景分割方法和装置 |
| CN105023249B (zh) * | 2015-06-26 | 2017-11-17 | 清华大学深圳研究生院 | 基于光场的高光图像修复方法及装置 |
-
2016
- 2016-10-18 US US16/342,735 patent/US11423562B2/en active Active
- 2016-10-18 CN CN201680091169.XA patent/CN109997170B/zh active Active
- 2016-10-18 WO PCT/EP2016/074992 patent/WO2018072817A1/en unknown
- 2016-10-18 EP EP16784856.3A patent/EP3516625B8/en active Active
- 2016-10-18 ES ES16784856T patent/ES2866975T3/es active Active
- 2016-10-18 KR KR1020197014305A patent/KR20190065432A/ko active IP Right Grant
- 2016-10-18 JP JP2019541848A patent/JP6855587B2/ja active Active
- 2016-10-18 IL IL266041A patent/IL266041B/en unknown
- 2016-10-18 CA CA3040002A patent/CA3040002C/en active Active
- 2016-12-20 JP JP2019541849A patent/JP7043085B2/ja active Active
- 2016-12-20 WO PCT/EP2016/081966 patent/WO2018072858A1/en unknown
- 2016-12-20 US US16/342,739 patent/US10832429B2/en active Active
- 2016-12-20 EP EP16816689.0A patent/EP3516626B1/en active Active
- 2016-12-20 ES ES16816689T patent/ES2864834T3/es active Active
- 2016-12-20 CN CN201680091175.5A patent/CN110036410B/zh active Active
- 2016-12-20 CA CA3040006A patent/CA3040006C/en active Active
- 2016-12-20 KR KR1020197014170A patent/KR20190076998A/ko not_active Application Discontinuation
-
2019
- 2019-04-15 IL IL266036A patent/IL266036B/en active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| US20190236796A1 (en) | 2019-08-01 |
| CN110036410A (zh) | 2019-07-19 |
| CA3040006A1 (en) | 2018-04-26 |
| ES2864834T3 (es) | 2021-10-14 |
| KR20190065432A (ko) | 2019-06-11 |
| IL266036B (en) | 2021-02-28 |
| ES2866975T3 (es) | 2021-10-20 |
| CN109997170A (zh) | 2019-07-09 |
| JP7043085B2 (ja) | 2022-03-29 |
| WO2018072858A1 (en) | 2018-04-26 |
| EP3516626B1 (en) | 2020-11-25 |
| IL266041A (en) | 2019-06-30 |
| EP3516625A1 (en) | 2019-07-31 |
| US20200051266A1 (en) | 2020-02-13 |
| CA3040006C (en) | 2023-09-26 |
| US10832429B2 (en) | 2020-11-10 |
| IL266041B (en) | 2022-09-01 |
| WO2018072817A1 (en) | 2018-04-26 |
| CA3040002C (en) | 2023-12-12 |
| EP3516625B1 (en) | 2020-11-25 |
| IL266036A (en) | 2019-06-30 |
| JP2019532451A (ja) | 2019-11-07 |
| CN109997170B (zh) | 2023-08-11 |
| EP3516625B8 (en) | 2021-04-21 |
| CA3040002A1 (en) | 2018-04-26 |
| JP2020503817A (ja) | 2020-01-30 |
| US11423562B2 (en) | 2022-08-23 |
| KR20190076998A (ko) | 2019-07-02 |
| CN110036410B (zh) | 2023-06-30 |
| EP3516626A1 (en) | 2019-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6855587B2 (ja) | 視点から距離情報を取得するための装置及び方法 | |
| US9965870B2 (en) | Camera calibration method using a calibration target | |
| EP3091508B1 (en) | Three-dimensional imaging system | |
| US20150161427A1 (en) | Barcode imaging | |
| CN106524909B (zh) | 三维图像采集方法及装置 | |
| US9818199B2 (en) | Method and apparatus for estimating depth of focused plenoptic data | |
| WO2022126870A1 (en) | Three-dimensional imaging method and method based on light field camera and three-dimensional imaging measuring production line | |
| EP3182372B1 (en) | Method and system for estimating the position of a projection of a chief ray on a sensor of a light-field acquisition device | |
| CN110689577A (zh) | 单相机环境中主动式刚体的位姿定位方法及相关设备 | |
| WO2021108626A1 (en) | System and method for correspondence map determination | |
| US10096113B2 (en) | Method for designing a passive single-channel imager capable of estimating depth of field | |
| JP6285686B2 (ja) | 視差画像生成装置 | |
| KR20170088859A (ko) | 비집속 플렌옵틱 데이터의 깊이를 추정하는 방법 및 장치 | |
| JP2018081378A (ja) | 画像処理装置、撮像装置、画像処理方法および画像処理プログラム | |
| CN111489384A (zh) | 基于互视角的遮挡评估方法及装置、设备、系统和介质 | |
| TW202014665A (zh) | 位置檢測方法及其電腦程式產品 | |
| CN115514877A (zh) | 用于从多视角图像降噪的装置和方法 | |
| JP2017009477A (ja) | 3次元形状計測装置、3次元形状計測方法および3次元形状計測プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190618 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190925 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201019 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210302 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210317 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6855587 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |