JP2013161992A - 変形可能な反射光学素子、光学系、及び露光装置 - Google Patents
変形可能な反射光学素子、光学系、及び露光装置 Download PDFInfo
- Publication number
- JP2013161992A JP2013161992A JP2012023554A JP2012023554A JP2013161992A JP 2013161992 A JP2013161992 A JP 2013161992A JP 2012023554 A JP2012023554 A JP 2012023554A JP 2012023554 A JP2012023554 A JP 2012023554A JP 2013161992 A JP2013161992 A JP 2013161992A
- Authority
- JP
- Japan
- Prior art keywords
- optical system
- back surface
- reflective
- deformable
- optical element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Abstract
【課題】簡単な機構を用いて反射部材の反射面を種々の形状に容易に変形可能とする。
【解決手段】照明光ILを反射するデフォーマブルミラー50であって、照明光ILを反射する反射面22dを有するミラー要素22と、ミラー要素22の周辺部の保持部22aを保持するホールドブロック23Aと、ミラー要素22の反射面22dの裏面22eに対して裏面22eに向かう方向の力を与えて、その裏面22eに向かう方向に関する第1位置と第2位置との間で反射面22dを変形させる複数の駆動ユニット58と、を備え、駆動ユニット58から裏面22eに対して裏面22eに向かう方向の力が付与されていないときに、反射面22dはその第2位置にある。
【選択図】図2
【解決手段】照明光ILを反射するデフォーマブルミラー50であって、照明光ILを反射する反射面22dを有するミラー要素22と、ミラー要素22の周辺部の保持部22aを保持するホールドブロック23Aと、ミラー要素22の反射面22dの裏面22eに対して裏面22eに向かう方向の力を与えて、その裏面22eに向かう方向に関する第1位置と第2位置との間で反射面22dを変形させる複数の駆動ユニット58と、を備え、駆動ユニット58から裏面22eに対して裏面22eに向かう方向の力が付与されていないときに、反射面22dはその第2位置にある。
【選択図】図2
Description
本発明は、変形可能な反射光学素子、この反射光学素子を有する光学系、及びこの光学系を備える露光装置に関する。さらに本発明は、露光装置を用いるデバイス製造方法に関する。
例えば半導体デバイスの製造工程の一つであるリソグラフィ工程においては、レチクル(又はフォトマスク等)に形成されているパターン、又は空間光変調器等で生成されるパターンを、投影光学系を介してフォトレジストが塗布されたウエハ(又はガラスプレート等)の表面に転写するために、ステッパー等の一括露光型の露光装置、又はスキャニングステッパー等の走査露光型等の露光装置等が使用されている。
これらの露光装置に搭載される投影光学系は、諸収差が所定の許容範囲内に収まるように組立調整が行われる。この際に、例えば歪曲収差や倍率誤差等の回転対称で、かつ低次数の収差成分が残存していても、これらの収差は投影光学系に装着されている通常の結像特性補正機構(例えば所定のレンズ及び/又はミラーの光軸方向の位置や傾斜角を制御する機構)によって補正することができる。これに対して、光軸上での非点収差(以下、センターアスと言う。)のような非回転対称な収差成分が残存している場合には、従来の通常の結像特性補正機構ではその補正は困難である。
そこで、そのような非回転対称な収差成分を補正するために、投影光学系が備えるミラーの側面の凸部をアクチュエータで微小量変形させることによって、そのミラーの反射面の形状を変形させるようにした補正機構が提案されている(例えば、特許文献1参照)。この補正機構によれば、比較的小さい力でその反射面を変形させることができる。
従来の非回転対称な収差成分の補正機構は、ミラー側面の凸部を機械的に変形させていたため、その凸部の変形量とミラーの反射面の変形量との関係が複雑で、その反射面を目標とする形状に高精度に変形させるのが困難であるとともに、その反射面を種々の複雑な形状に変形させるのが困難であった。
また、従来の補正機構は、ミラー側面の凸部に反射面側に向かう正の最大荷重と反射面の裏面側に向かう負の最大荷重との間で、可変の荷重を付与する機構であったため、補正機構が複雑であった。
また、従来の補正機構は、ミラー側面の凸部に反射面側に向かう正の最大荷重と反射面の裏面側に向かう負の最大荷重との間で、可変の荷重を付与する機構であったため、補正機構が複雑であった。
本発明の態様は、このような事情に鑑み、簡単な機構を用いて反射部材の反射面を種々の形状に容易に変形可能とすることを目的とする。
本発明の第1の態様によれば、光を反射する変形可能な反射光学素子が提供される。この反射光学素子は、光を反射する反射面を有する反射部材と、その反射部材の周辺部を保持する保持部と、その反射部材のその反射面の裏面に対して所定方向の力を与えて、前記所定方向に関する第1位置と第2位置との間で、前記反射面を変形させる少なくとも一つの駆動部と、を備え、その駆動部からその裏面に対してその所定方向の力が付与されていないとき、その反射面は、その第2位置にあるものである。
また、第2の態様によれば、複数の光学素子を含む光学系が提供される。この光学系は、第1の態様の変形可能な反射光学素子を備え、その光学系の非回転対称な収差に応じてその駆動部を介してその反射光学素子のその反射部材のその反射面の変形量が制御されるものである。
また、第3の態様によれば、露光光でパターンを照明し、その露光光でそのパターン及び投影光学系を介して基板を露光する露光装置において、第2の態様の光学系を備える露光装置が提供される。
また、第3の態様によれば、露光光でパターンを照明し、その露光光でそのパターン及び投影光学系を介して基板を露光する露光装置において、第2の態様の光学系を備える露光装置が提供される。
また、第4の態様によれば、第3の態様の露光装置を用いて基板上に感光層のパターンを形成することと、そのパターンが形成されたその基板を処理することと、を含むデバイス製造方法が提供される。
本発明の態様によれば、駆動部から反射部材の反射面の裏面に対して与える所定方向の力を変化させることで、その反射面をその第1位置と第2位置との間で変形させることができる。従って、簡単な機構を用いてその反射面を種々の形状に容易に変形可能である。
以下、本発明の実施形態の一例につき図1〜図6を参照して説明する。
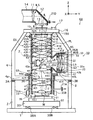
図1は、本実施形態の露光装置EXの露光本体部を示す。露光装置EXは、一例としてスキャニングステッパー(スキャナー)よりなる走査露光型の投影露光装置である。図1において、露光装置EXは、露光用の照明光IL(露光光)を発生する露光光源(不図示)と、照明光ILでレチクルR(マスク)を照明する照明光学系ILS(図1ではこの一部のみが表れている)と、レチクルRのパターンの像をウエハW(基板)の表面に形成する投影光学系PLとを備えている。さらに、露光装置EXは、レチクルRを保持して移動するレチクルステージ15と、ウエハWを保持して移動するウエハステージ32と、装置全体の動作を統括的に制御するコンピュータよりなる主制御系5(図2参照)とを備えている。
図1は、本実施形態の露光装置EXの露光本体部を示す。露光装置EXは、一例としてスキャニングステッパー(スキャナー)よりなる走査露光型の投影露光装置である。図1において、露光装置EXは、露光用の照明光IL(露光光)を発生する露光光源(不図示)と、照明光ILでレチクルR(マスク)を照明する照明光学系ILS(図1ではこの一部のみが表れている)と、レチクルRのパターンの像をウエハW(基板)の表面に形成する投影光学系PLとを備えている。さらに、露光装置EXは、レチクルRを保持して移動するレチクルステージ15と、ウエハWを保持して移動するウエハステージ32と、装置全体の動作を統括的に制御するコンピュータよりなる主制御系5(図2参照)とを備えている。
以下、投影光学系PLのレチクルR側の部分光学系(後述の第1結像光学系G1)の光軸AX1に平行にZ軸を取り、Z軸に垂直な平面(本実施形態ではほぼ水平面)内で図1の紙面に平行にY軸を、図1の紙面に垂直にX軸を取って説明する。走査露光時のレチクルR及びウエハWの走査方向はY軸に平行な方向(Y方向)であり、レチクルRのパターン面及びウエハWの表面はXY面にほぼ平行である。また、X軸、Y軸、及びZ軸に平行な軸の回りの回転方向(傾斜方向)をθx方向、θy方向、及びθz方向とも呼ぶ。
まず、投影光学系PL、レチクルステージ15、及びウエハステージ32を含む露光本体部は、フレーム機構によって支持されている。そのフレーム機構は、床面に設置されたフレームキャスタよりなるベース部材1と、ベース部材1の上面に設置された例えば3本(4本等でも可)の第1コラム2と、これらの第1コラム2の上面に例えば能動型の防振装置3A,3B(実際には3個又は4個配置されている)を介して設置された第2コラム4とを備えている。第2コラム4の底部に設けられた平板状の支持板部4aの中央のU字型の開口部に投影光学系PLが搭載されている。
そのフレーム機構の近傍に設置された露光光源(不図示)は、ArFエキシマレーザ光源(発振波長193nm)であるが、その他にKrFエキシマレーザ光源(波長248nm)、又は固体レーザ(YAGレーザ若しくは半導体レーザ等)の高調波発生装置等も使用できる。その露光光源から射出された照明光ILは、照明光学系ILSに入射する。照明光学系ILSは、レチクルRのパターン面(下面)のX方向(非走査方向)に細長いスリット状の照明領域を照明光ILによりほぼ均一な照度分布で照明する。
サブチャンバ14内に配置された照明光学系ILSは、例えば米国特許出願公開第2003/025890号明細書などに開示されるように、空間光変調器又は回折光学素子等を含む光量分布設定機構(不図示)、オプティカルインテグレータ(フライアイレンズ又はロッドインテグレータなど)等を含む照度均一化光学系(不図示)、レチクルブラインド等の可変視野絞り(不図示)、並びにレンズ11,13及びミラー12を含むコンデンサ光学系等を含んでいる。また、通常照明、2極照明、4極照明、又は輪帯照明等の照明条件に応じて、その光量分布設定機構が、照明光学系ILS内の瞳面(不図示)における照明光ILの光量分布を、光軸を中心とする円形領域、光軸を挟む2つの領域、光軸を挟む4つの領域、又は輪帯状の領域等でそれぞれ大きい光量となる分布に切り換える。
レチクルRを通過した照明光ILは、投影光学系PLを介して、フォトレジスト(感光剤)が塗布された円板状の基板であるウエハ(半導体ウエハ)Wの表面の一つのショット領域のX方向に細長い露光領域に、レチクルRの照明領域内のパターンを投影倍率β(例えば1/4,1/5等)で縮小した像を形成する。本実施形態の投影光学系PLは反射屈折光学系である。投影光学系PLは、フランジ部44aによって架台4aに載置されている。照明光学系ILS及び投影光学系PLの照明光ILの光路はほぼ気密化され、これらの光路には、ほぼ真空紫外域の光に対して高透過率の気体(以下、「パージガス」と呼ぶ)であるドライエアー、窒素、又は希ガス(ヘリウム等)等が、供給用の配管20A等及び排気用の配管21A,21D等を介して供給されている。
また、レチクルRは、レチクルホルダ(不図示)を介してレチクルステージ15の上面に保持され、レチクルステージ15はレチクルベース16のXY面に平行な上面に、Y方向に一定速度で移動可能に、かつX方向、Y方向、θz方向に変位可能な状態で載置されている。レチクルベース16は、第2コラム4の上端に固定されている。レチクルステージ15の少なくともX方向、Y方向の位置、及びθz方向の回転角はレーザ干渉計17によって計測され、この計測値及び主制御系5からの制御情報に基いて、リニアモータ等を含む駆動装置(不図示)がレチクルステージ15を駆動する。
一方、ウエハWは、ウエハホルダ(不図示)を介してウエハテーブル31の上面に保持され、ウエハテーブル31はウエハステージ32の上面に固定されている。ウエハステージ32は、ウエハベース33のXY面に平行な上面にY方向に一定速度で移動可能に、かつX方向、Y方向にステップ移動可能に載置されている。ウエハベース33は、能動型の防振装置38A,38B等を介してベース部材1上に載置されている。ウエハステージ32の少なくともX方向、Y方向の位置、及びθz方向の回転角はレーザ干渉計34(又はエンコーダ装置等)によって計測され、この計測値及び主制御系5からの制御情報に基いて、リニアモータ等を含む駆動装置(不図示)がウエハステージ32を駆動する。
また、ウエハステージ32の内部には、ウエハテーブル31(ウエハW)のZ方向の位置(フォーカス位置)と、θx方向及びθy方向の傾斜角とを調整するためのフォーカス・レベリング機構が組み込まれている。投影光学系PLの下部側面に配置された投射光学系35Aと受光光学系35Bとから構成される斜入射方式の多点の焦点位置検出系(オートフォーカスセンサ)によって計測されるウエハWの複数の計測点でのフォーカス位置の情報に基いて、そのフォーカス・レベリング機構は、露光中に継続してウエハWの表面を投影光学系PLの像面に合焦させる。投射光学系35A及び受光光学系35Bは、投影光学系PLのフランジ部44aの底面に取り付けられたセンサーコラム36に取り付けられている。
また、ウエハテーブル31の上部に、例えば米国特許第6,573,997号明細書等で開示されているシアリング干渉方式又はポイント・ディフラクション・干渉方式(PDI方式)の波面収差計測装置39が設けられている。波面収差計測装置39によって計測される投影光学系PLの波面収差の情報は図2の結像特性制御系6に供給される。結像特性制御系6では、通常の露光時には、例えば照明光ILの積算エネルギー等に基づいて、投影光学系PLの波面収差の変動量を逐次予測している。
露光時には、不図示のアライメント系を用いてレチクルR及びウエハWのアライメントを行った後、ウエハステージ32をX方向、Y方向にステップ移動することで、ウエハWの露光対象のショット領域が露光領域の手前に移動する。その後、レチクルRの照明領域内のパターンの投影光学系PLによる像でウエハWの当該ショット領域を露光しつつ、レチクルステージ15及びウエハステージ32を介してレチクルRとウエハWとをY方向に投影光学系PLの投影倍率を速度比として同期移動する走査露光が行われる。そのステップ移動と走査露光とをステップ・アンド・スキャン方式で繰り返すことによって、ウエハWの全部のショット領域にレチクルRのパターンの像が露光される。
次に、本実施形態の投影光学系PLの構成等につき詳細に説明する。図1において、反射屈折光学系からなる投影光学系PLは、レチクルRのパターンの第1中間像を形成する屈折型の第1結像光学系G1と、凹面鏡よりなるミラー要素22と2つの負屈折力のレンズL8,L9とから構成されて第1中間像とほぼ等倍の第2中間像を形成する第2結像光学系G2と、第2中間像からの光を用いてウエハW上にレチクルRのパターンの最終像を形成する屈折型の第3結像光学系G3と、デフォーマブルミラー50と、を備えている。デフォーマブルミラー50は、ミラー要素22を含み、ミラー要素22の反射面の形状を制御可能である。さらに、投影光学系PLは、第1結像光学系G1からの光を第2結像光学系G2に向かって偏向する反射面Aと、第2結像光学系G2からの光を第3結像光学系G3に向かって偏向する反射面Bとが形成された光路折り曲げ鏡FMを備えている。第1中間像及び第2中間像は、それぞれほぼ反射面Aと第1結像光学系G1との間、及び反射面Bと第3結像光学系G3との間に形成される。
また、第1結像光学系G1及び第3結像光学系G3はZ軸に平行な光軸AX1を有し、第2結像光学系G2の光軸AX2は、光軸AX1と直交するように、かつY軸に平行に設定されている。更に、光路折り曲げ鏡FMの2つの反射面A,Bの交線(厳密にはその仮想延長面の交線)Cで光軸AX1と光軸AX2とが交差している。
第1結像光学系G1は、レチクルR側から順に、平行平面板L1、レンズL2,L3,L4,L5,L6,L7を配置して構成されている。第2結像光学系G2は、光の進行往路に沿ってレチクル側(即ち入射側)から順に、負のレンズL8及びL9と、ミラー要素22とを配置して構成されている。第3結像光学系G3は、光の進行方向に沿ってレチクル側から順に、レンズL10,L11と、開口絞りASと、レンズL12,L13とを配置して構成されている。開口絞りASの配置面は投影光学系PLの瞳面又はその近傍の面であり、ミラー要素22の反射面22dは、投影光学系PLの瞳面とほぼ共役である。なお、投影光学系PLの構成は任意である。
第1結像光学系G1は、レチクルR側から順に、平行平面板L1、レンズL2,L3,L4,L5,L6,L7を配置して構成されている。第2結像光学系G2は、光の進行往路に沿ってレチクル側(即ち入射側)から順に、負のレンズL8及びL9と、ミラー要素22とを配置して構成されている。第3結像光学系G3は、光の進行方向に沿ってレチクル側から順に、レンズL10,L11と、開口絞りASと、レンズL12,L13とを配置して構成されている。開口絞りASの配置面は投影光学系PLの瞳面又はその近傍の面であり、ミラー要素22の反射面22dは、投影光学系PLの瞳面とほぼ共役である。なお、投影光学系PLの構成は任意である。
本実施形態において、投影光学系PLを構成する全ての屈折光学素子(レンズ成分)の光学材料には合成石英又は蛍石(CaF2 結晶)を使用している。また、光路折り曲げ鏡FM及びミラー要素22は、一例としてコーニング社のULE(Ultra Low Expansion:商品名)などの超低膨張率のガラス材料、又はショット社のゼロデュア(Zerodur:商品名)などの低膨張率のガラスセラミックス材料から形成できる。例えばULEを用いる場合のミラー要素22のヤング率(ほぼ67.6GPa)は鉄鋼の1/3程度であり、ポアソン比(ほぼ0.17)は鉄鋼の1/2程度であり、ミラー要素22では同じ荷重(応力)に対して鉄鋼の3倍程度の弾性変形がある。これらの材料の反射面はアルミニウム等の金属膜又は誘電体多層膜を被着することにより形成される。また、ミラー要素22の材料としてベリリウム(Be)等の金属を用いても良い。ベリリウムを用いる場合には、ミラー要素22全体を炭化ケイ素等でコーティングすることが好ましい。
また、第1結像光学系G1の平行平面板L1、レンズL2〜L7は、それぞれ輪帯状のレンズ枠42A,42B,42C,42D,42E,42F,42Gを介して円筒状の分割鏡筒41A,41B,41C,41D,41E,41F,41G内に保持され、分割鏡筒41A〜41Gは光軸AX1に沿って気密性を保持する状態で例えば対向するフランジ部(不図示)をボルト(不図示)で固定して連結されている。レンズ枠42B〜42G等には上記のパージガスを流通させるための複数の開口が形成されている(以下同様)。
同様に、第3結像光学系G3のレンズL10,L11,L12,L13は、それぞれ輪帯状のレンズ枠42H,42K,42I,42Jを介して円筒状の分割鏡筒41H,44,41I,41J内に保持されている。開口絞りASは、分割鏡筒44,41Iに挟まれた分割鏡筒41K内に保持され、分割鏡筒41H,44,41K,41I,41Jは気密性を保持する状態で連結されている。そして、分割鏡筒44にフランジ部44aが設けられている。分割鏡筒41G,41H間に+Y方向に開口が設けられた円筒状の分割鏡筒43が連結され、分割鏡筒43内の突部に保持枠43aを介して光路折り曲げ鏡FMが固定されている。分割鏡筒41A〜41K,43,44より第1の部分鏡筒7が構成されている。
また、図2の結像特性制御系6の制御のもとで、例えばレンズ枠42A〜42Eを駆動して、平行平面板L1、レンズL2〜L5をZ方向、θx方向、θy方向に微動することによって、投影光学系PLのディストーション及びコマ収差等の回転対称で比較的低次の収差を補正する回転対称な結像特性補正機構(不図示)が設けられている。このような回転対称な結像特性補正機構としては、例えば米国特許出願公開第2006/244940号明細書に開示されている機構を使用可能である。
また、第2結像光学系G2のレンズL8,L9は、それぞれ保持枠46A,46Bを介して、円筒型の分割鏡筒45,41L内に保持され、ミラー要素22を含むデフォーマブルミラー50は、分割鏡筒41Lに連結されて保持されている。デフォーマブルミラー50は、投影光学系PLの結像特性としてのセンターアス等の非回転対称な収差及び高次の収差を含む波面収差を補正するための補正機構でもある。本実施形態では、その波面収差をツェルニケ(Zernike)多項式の係数(以下、ツェルニケ係数ziという)で表すものとする。図2の結像特性制御系6は、通常の露光時には、予測される投影光学系PLの結像特性の変動量のうち、回転対称で比較的低次の収差を除く波面収差(例えば5次〜81次のツェルニケ係数ziで表される収差)の情報を図2の収差制御系9に供給する。収差制御系9では、その波面収差を補正するようにデフォーマブルミラー50のミラー要素22の反射面22dを変形させる。収差制御系9には、デフォーマブルミラー50を駆動するための情報が記憶された記憶装置10が連結されている。
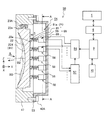
デフォーマブルミラー50は、ミラー要素22がホールドブロック23を介して収納された円筒状の分割鏡筒47と、分割鏡筒47の+Y方向の開口を覆うように分割鏡筒47の端面47bに固定されたハウジング53と、ハウジング53の内面に設けられてミラー要素22の反射面22dを変形させる荷重付与系54と、を備えている。なお、分割鏡筒47は、分割鏡筒41Lに連結される。
図2に示すように、荷重付与系54は、ミラー要素22の裏面22eの複数の作用点Pi(i=1〜n;nは2以上の整数)に裏面22eから反射面22dの方向(−Y方向)に向かう可変の荷重fi(fi≧0)を付与する複数の駆動ユニット58を有する。複数の駆動ユニット58は、互いに同じ構成である。複数の駆動ユニット58の+Y方向の端部はハウジング53の内面に固定され、ハウジング53は複数のボルト40Aを介して分割鏡筒47に固定されている。複数の駆動ユニット58の−Y方向の端部はミラー要素22の裏面22eに離脱可能な状態で接触している。また、図2のAA線に沿う断面図である図3に示すように、外形がほぼ円柱状のミラー要素22の側面に、等角度間隔で3箇所の凸形状の保持部22a,22b,22cが形成されている。保持部22a,22b,22cのそれぞれは、ホールドブロック23A,23B,23Cに保持されており、ホールドブロック23A,23B,23Cは、分割鏡筒47の内面に固定されている。ミラー要素22は、3つのホールドブロック23A〜23Cによってキネマティックに安定に支持されている。なお、ホールドブロック23A〜23Cは、図1では代表的に一つのホールドブロック23で表されている。
また、一例として、荷重付与系54の複数の駆動ユニット58は、ミラー要素22の裏面22eにほぼ均等に格子状に配置された複数の作用点Pi(図3では19個の作用点P1〜P19)に荷重を付与するように配置されている。一例として、中央の作用点P10は、光軸AX2上に位置している。なお、例えば中央の作用点P10の代わりに、Z方向に離れて配置された2つの作用点を用いることによって、作用点Pi(駆動ユニット58)を偶数(例えば20個)とすることもできる。なお、作用点Pi(駆動ユニット58)の個数及び配置は任意である。
図2において、作用点Piに荷重を与える駆動ユニット58は、ハウジング53の内面に一端が固定されたロードセル等の荷重センサ60と、荷重センサ60の他端に固定されてY方向に伸縮可能な駆動素子59と、駆動素子59の先端部に一端が固定された圧縮ばね61とを有する。例えば、この圧縮ばね61は、剛性の高い、例えば鉄鋼又はステンレス等の金属製の圧縮コイルばねで形成してもよい。圧縮ばね61の他端には、ミラー要素22の裏面22eの作用点Piに接触する半球状の金属製の接触部61aが設けられている。なお、接触部61aとしては、平面部で裏面22eに接触する部材を使用してもよい。また、駆動素子59としては、ピエゾ素子又は超音波モータ等が使用できる。
荷重センサ60は、駆動ユニット58によってハウジング53からミラー要素22の裏面22eに向けて−Y方向に付与される荷重の情報を含む検出信号を検出信号処理系57に供給する。検出信号処理系57では、荷重センサ60の検出信号から各作用点Piの荷重を求め、このようにして求めた荷重の情報を駆動素子制御系56に供給する。駆動素子制御系56では、各作用点Piの荷重が収差制御系9に設定される目標値になるように対応する駆動ユニット58の駆動素子59の伸縮量を制御する。
収差制御系9は、結像特性制御系6から供給される補正対象の波面収差(ミラー要素22の反射面22dのn個の位置での目標変形量の情報)及び記憶装置10に記憶されているミラー要素22のヤング率及びポアソン比(弾性係数)の情報から、反射面22dに対応する裏面22eの作用点Piにおける−Y方向への荷重の目標値を計算する。収差制御系9は、計算した荷重の目標値の情報を駆動素子制御系56に供給する。これによって、反射面22dの形状は例えば理想面BDを含む変形可能範囲内の任意の面B2の近傍に設定可能である。この場合、全体としてのミラー要素22の反射面の変形の自由度はnであり、各自由度で変形可能範囲の任意の変形量を設定できる。
なお、本実施形態の理想面BDとは、図1の第1及び第3結像光学系G1,G3及び第2結像光学系G2(ここではミラー要素22を除く部分)が実質的に無収差である場合に、投影光学系PLを実質的に無収差とするために必要なミラー要素22の反射面22dの面形状を表している。また、本実施形態では、反射面22dの変形可能範囲はその理想面BDを中心としているため、理想面BDは中立面でもある。本実施形態においてその変形可能範囲とは、例えば照明光ILの照射エネルギーの積算値によって投影光学系PLの結像特性が変化するときに、経験的又は計算上でその結像特性の変化を補正(相殺)するために必要なミラー要素22の反射面22dの形状の弾性変形による可変範囲を含むものである。
本実施形態では、図4(C)に示すように、全部の駆動ユニット58からミラー要素22の裏面22eに対して−Y方向への荷重fiが付与されていない状態(全部のfi=0の状態)では、ミラー要素22の反射面22dが、変形可能範囲で最も裏面22eに近い方向の位置にある下限面B1に合致するように、予めミラー要素22の反射面22dは理想面BDに対応して凹面に形成されている。本実施形態では、下限面B1の形状は非球面である。すなわち、ミラー要素22は、反射面22dが理想面BDに対して、凹んだ状態の非球面加工が施されている。
そして、例えば露光を開始した直後で、投影光学系PLの結像特性が目標とする状態からほとんど変化していない状態では、図4(A)に示すように、荷重付与系54の全部の駆動ユニット58においてミラー要素22の裏面22eに対して−Y方向に向かう荷重fiをそれぞれ可変範囲内の中央の値Si/2に設定する。これによって、ミラー要素22の反射面22dはほぼ理想面BDに合致するように弾性変形するため、投影光学系PLの結像特性は目標とする状態に維持される。
その後、露光継続中に、照明光ILの照射エネルギーの積算によって投影光学系PLの結像特性が大きく変化して、例えば波面収差が光軸付近で正の最大値になるように均一に増大した状態では、図4(B)に示すように、荷重付与系54の全部の駆動ユニット58において裏面22eに対して−Y方向に向かう荷重fiをそれぞれ可変範囲内の最大値Siに設定する。これに対応して、ミラー要素22の反射面22dは弾性変形によって変形可能範囲内で最も裏面22eから離れた方向の位置にある上限面B3の近傍に変形し、ミラー要素22における波面収差が負になるため、投影光学系PLの結像特性は目標とする状態に維持される。
一方、例えば波面収差が光軸付近で負の最大値になるように均一に減少した状態では、図4(C)に示すように、荷重付与系54の全部の駆動ユニット58において裏面22eに対して−Y方向に向かう荷重fiをそれぞれ可変範囲内の最小値(=0)付近に設定する。これに対応して、ミラー要素22の反射面22dは、弾性変形の復元力によって変形可能範囲内で最も裏面22eに近い下限面B1の近傍の形状に戻り、ミラー要素22における波面収差が正になるため、投影光学系PLの結像特性は目標とする状態に維持される。そして、荷重付与系54の全部の駆動ユニット58から裏面22eに付与する−Y方向の荷重を独立に制御することによって、ミラー要素22の反射面22dの形状を下限面B1と上限面B3との間の任意の面B2の近傍に設定することができ、これによって常に投影光学系PLの結像特性を目標とする状態に維持できる。
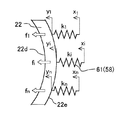
ここで、予めミラー要素22の反射面22dの形状を変形可能範囲内の下限面B1に形成しておくことにより、複数の駆動ユニット58から裏面22eに−Y方向に可変の荷重を与えることで、反射面22dを下限面B1以上の任意の形状に弾性変形できることにつき、図5〜図6(D)を参照して説明する。まず、図2のミラー要素22及び複数の駆動ユニット58を図5に示すように簡略化して示す。図5において、ミラー要素22のi番目(i=1〜n)の作用点に関して、駆動ユニット58の圧縮コイルばね61のばね定数をki、圧縮コイルばね61の入力変位をxi、圧縮コイルばね61による裏面22e(作用点)の変位をyi、駆動ユニット58による裏面22eに対する荷重をfiとする。また、このときに各作用点に対応するミラー要素22の反射面22dの各点における−Y方向への変形量の分布をツェルニケ係数ziを用いて表すものとすると、反射面22dの面変形量は次のm個のツェルニケ係数zi(i=1〜m)のベクトル<z>で表すことができる。なお、例えばツェルニケ係数z1〜z81を使用する場合には、m=81である。

<f>=K(<x>−<y>) …(12)
また、裏面22eの荷重のベクトル<f>と、作用点の変位のベクトル<y>及び反射面22dの変形量の分布を表すツェルニケ係数のベクトル<z>との関係を、n行×n列の行列Rfy及びm行×n列の行列Rfzを用いて次のように表す。行列Rfzにおいて行数を表すmは使用するツェルニケ係数の項数を表しており、例えばm=81である。
<y>=Rfy<f> …(13A), <z>=Rfz<f> …(13B)
式(12)、式(13A)、及び式(13B)の関係は、図5に対応する図6(A)のブロック図で表すことができる。図6(A)において、減算部70からの差分(<x>−<y>)に乗算部72Aで行列Kが乗算されて荷重のベクトル<f>が求められ、ベクトル<f>には乗算部72B及び72Cでそれぞれ行列Rfy及びRfzが乗算される。
式(12)、式(13A)、及び式(13B)の関係は、図5に対応する図6(A)のブロック図で表すことができる。図6(A)において、減算部70からの差分(<x>−<y>)に乗算部72Aで行列Kが乗算されて荷重のベクトル<f>が求められ、ベクトル<f>には乗算部72B及び72Cでそれぞれ行列Rfy及びRfzが乗算される。
図6(A)から次の関係が得られる。
<f>=K<x>−K・Rfy<f> …(14A)
この式を変形すると次のようになる。
K<x>=(En+K・Rfy)<f> …(14B)
なお、式(14B)中のn行×n列の行列Enは単位行列である。そして、式(14B)を変形すると次式が得られる。
<f>=K<x>−K・Rfy<f> …(14A)
この式を変形すると次のようになる。
K<x>=(En+K・Rfy)<f> …(14B)
なお、式(14B)中のn行×n列の行列Enは単位行列である。そして、式(14B)を変形すると次式が得られる。
<f>=(En−K・Rfy)-1K<x>=Rxf<x> …(15A)
ただし、Rxf=(En−K・Rfy)-1 …(15B)
式(15A)を用いると、図6(A)は図6(B)のように書き直すことができる。図6(B)において、乗算部72Dはベクトル<x>に行列Rxfを乗算する。
図6(B)において、必要とされる面変形量のベクトル<z>を得るために、荷重のベクトル<f>を0以上の成分Δfi(0又は裏面22dを押す力)のみを持つ押し込み成分のベクトル<Δf>と、予め反射面の形状を下限面にしておくための負の成分(裏面22dをハウジング53側に引き込む成分)を持つオフセット成分のベクトル<foffset>とに分けると、図6(B)のベクトル<f>からベクトル<z>を求める部分は図6(C)のように書き直すことができる。図6(C)において、加算部74では仮想的に次の演算が行われる。
ただし、Rxf=(En−K・Rfy)-1 …(15B)
式(15A)を用いると、図6(A)は図6(B)のように書き直すことができる。図6(B)において、乗算部72Dはベクトル<x>に行列Rxfを乗算する。
図6(B)において、必要とされる面変形量のベクトル<z>を得るために、荷重のベクトル<f>を0以上の成分Δfi(0又は裏面22dを押す力)のみを持つ押し込み成分のベクトル<Δf>と、予め反射面の形状を下限面にしておくための負の成分(裏面22dをハウジング53側に引き込む成分)を持つオフセット成分のベクトル<foffset>とに分けると、図6(B)のベクトル<f>からベクトル<z>を求める部分は図6(C)のように書き直すことができる。図6(C)において、加算部74では仮想的に次の演算が行われる。
<f>=<foffset>+<Δf> …(16A)
ただし、Δfi≧0,i=1〜n …(16B)
さらに、図6(C)の乗算部72Cを図6(D)のそれぞれ行列Rfzを乗算する2つの乗算部72C1,72C2に分けると、図6(C)は図6(D)のように変形できる。図6(D)において、ベクトル<foffset>による反射面22dのオフセットの変形量を示すベクトルは<zoffset>であり、ベクトル<Δf>による反射面22dの変形量のベクトルは<Δz>である。本実施形態では、ミラー要素22の反射面22dには、予めオフセットの変形量を示すベクトル<zoffset>に対応する変形が施されている。このため、荷重付与系54によってミラー要素22の裏面22eに裏面22eを押す方向の荷重分布を与えるだけで、反射面22dに任意の変形を与えることができる。
ただし、Δfi≧0,i=1〜n …(16B)
さらに、図6(C)の乗算部72Cを図6(D)のそれぞれ行列Rfzを乗算する2つの乗算部72C1,72C2に分けると、図6(C)は図6(D)のように変形できる。図6(D)において、ベクトル<foffset>による反射面22dのオフセットの変形量を示すベクトルは<zoffset>であり、ベクトル<Δf>による反射面22dの変形量のベクトルは<Δz>である。本実施形態では、ミラー要素22の反射面22dには、予めオフセットの変形量を示すベクトル<zoffset>に対応する変形が施されている。このため、荷重付与系54によってミラー要素22の裏面22eに裏面22eを押す方向の荷重分布を与えるだけで、反射面22dに任意の変形を与えることができる。
本実施形態の効果等は以下の通りである。
本実施形態のデフォーマブルミラー50は、照明光ILを反射する反射面22dを有する凹面鏡よりなるミラー要素22と、ミラー要素22の周辺部である側面の凸の保持部22a〜22cを保持するホールドブロック23A〜23Cと、ミラー要素22の反射面22dの裏面22eに、裏面22eに向かう方向(−Y方向)の荷重(力)を与えて、その裏面22eに向かう方向に関する上限面B3(第1位置)と下限面B1(第2位置)との間で、反射面22dを変形させる複数の駆動ユニット58と、を備えている。そし、駆動ユニット58から裏面22eに裏面22eに向かう方向の力が付与されていないときに、反射面22dは下限面B1にある。
本実施形態のデフォーマブルミラー50は、照明光ILを反射する反射面22dを有する凹面鏡よりなるミラー要素22と、ミラー要素22の周辺部である側面の凸の保持部22a〜22cを保持するホールドブロック23A〜23Cと、ミラー要素22の反射面22dの裏面22eに、裏面22eに向かう方向(−Y方向)の荷重(力)を与えて、その裏面22eに向かう方向に関する上限面B3(第1位置)と下限面B1(第2位置)との間で、反射面22dを変形させる複数の駆動ユニット58と、を備えている。そし、駆動ユニット58から裏面22eに裏面22eに向かう方向の力が付与されていないときに、反射面22dは下限面B1にある。
本実施形態によれば、駆動ユニット58からミラー要素22の裏面22eに裏面22eに向かう方向に付与される荷重を変化させることで、反射面22dを下限面B1と上限面B3との間(変形可能範囲内)の種々の位置に変形させることができる。従って、簡単な構成の駆動ユニット58を用いて反射面22dを種々の形状に容易に変形可能である。さらに、駆動ユニット58の個数を多くすることで、ミラー要素22の反射面22dをより多くの様々な形状に容易に変形可能である。
また、ミラー要素22は、弾性変形可能な材料で形成され、駆動ユニット58は−Y方向の力を付与し、下限面B1は、変形可能範囲のうち、−Y方向に関して上限面B3よりも裏面22e側にある。従って、駆動ユニット58から−Y方向に向かう荷重(一方向の力)を制御するだけで、反射面22dを変形可能範囲の任意の位置に変形できる。
なお、本実施形態では、反射面22dを変形させるために、駆動ユニット58から裏面22eに裏面22eに向かう荷重を付与している。これとは逆に、反射面22dを変形させるために、駆動ユニット58と同様の駆動ユニットから裏面22eに反射面22dから裏面22eに向かう方向(+Y方向)の可変の荷重を付与してもよい。この場合には、その駆動ユニットからの荷重が裏面22eに加わっていない状態で、反射面22dが変形可能範囲内の最も−Y方向側の上限面B3に一致するように、反射面22dを加工しておけばよい。この場合にも、一方向の荷重を付与すればよいため、駆動ユニットの構成が簡素化できる。
なお、本実施形態では、反射面22dを変形させるために、駆動ユニット58から裏面22eに裏面22eに向かう荷重を付与している。これとは逆に、反射面22dを変形させるために、駆動ユニット58と同様の駆動ユニットから裏面22eに反射面22dから裏面22eに向かう方向(+Y方向)の可変の荷重を付与してもよい。この場合には、その駆動ユニットからの荷重が裏面22eに加わっていない状態で、反射面22dが変形可能範囲内の最も−Y方向側の上限面B3に一致するように、反射面22dを加工しておけばよい。この場合にも、一方向の荷重を付与すればよいため、駆動ユニットの構成が簡素化できる。
また、駆動ユニット58はそれぞれ荷重センサ60を備え、荷重センサ60によって荷重を直接計測しているため、この計測結果に基づいてミラー要素22の裏面22eの作用点に目標とする荷重を正確に加えることができる。本実施形態では、各駆動ユニット58から裏面22eに向かう荷重(一方向に向かう荷重)だけを計測すればよいため、ロードセルのような荷重センサ60によって容易に荷重を計測できる。
なお、荷重センサ60の代わりに、ハウジング53に対する駆動素子59の先端部のY方向の変位を計測する変位センサ(例えば光学式、静電容量式、又は渦電流方式等のセンサ)を設け、この変位センサの計測値と圧縮ばね61の既知のばね定数とから荷重を計算してもよい。
さらに、例えば予め駆動ユニット58の駆動素子59の伸縮量と荷重との関係を求めておくことによって、荷重センサ60等を省略することも可能である。また、ミラー要素22の裏面22eには駆動素子59の先端を直接接触させることも可能である。
さらに、例えば予め駆動ユニット58の駆動素子59の伸縮量と荷重との関係を求めておくことによって、荷重センサ60等を省略することも可能である。また、ミラー要素22の裏面22eには駆動素子59の先端を直接接触させることも可能である。
また、ミラー要素22の裏面22eには例えば20個程度の駆動ユニット58が設けられているため、ミラー要素22の反射面22dの変形の自由度が高い。なお、ミラー要素22の裏面22eには一つの駆動ユニット58を設けるだけでもよい。
また、本実施形態の投影光学系PLは、レンズL8,L9及びミラー要素22(複数の光学素子)を含む反射屈折光学系において、それらの光学素子のうちのミラー要素22の反射面を変形可能なデフォーマブルミラー50を備えている。従って、投影光学系PLの結像特性の変動量(例えば非回転対称な収差及び高次の収差等)を補正するように、デフォーマブルミラー50によってミラー要素22の反射面を変形させることによって、投影光学系PLの結像特性を常に目標とする状態に維持できる。
また、本実施形態の投影光学系PLは、レンズL8,L9及びミラー要素22(複数の光学素子)を含む反射屈折光学系において、それらの光学素子のうちのミラー要素22の反射面を変形可能なデフォーマブルミラー50を備えている。従って、投影光学系PLの結像特性の変動量(例えば非回転対称な収差及び高次の収差等)を補正するように、デフォーマブルミラー50によってミラー要素22の反射面を変形させることによって、投影光学系PLの結像特性を常に目標とする状態に維持できる。
また、本実施形態の露光装置EXは、照明光IL(露光光)でレチクルRのパターンを照明し、照明光ILでそのパターン及び投影光学系PLを介してウエハW(基板)を露光する露光装置において、投影光学系PLはデフォーマブルミラー50を備えている。従って、投影光学系PLの結像特性を常に目標とする状態に高精度に維持できるため、レチクルRのパターンの像を高精度にウエハWの各ショット領域に露光できる。
なお、上述の実施形態では、ミラー要素22の周辺部は3箇所でホールドブロック23A〜23Cによって保持されている。この他の構成として、図7及び図7のAA線に沿う断面図である図8に示す変形例のデフォーマブルミラー50Aのように、ミラーの周辺部で所定の予圧を付与してもよい。なお、図7及び図8において、図2及び図3に対応する部分には同一の符号を付してその詳細な説明を省略する。
図7において、デフォーマブルミラー50Aは、反射面22Adを有し、厚さがほぼ均一な凹面鏡よりなるミラー要素22Aと、ミラー要素22Aの側面に等角度間隔で3箇所に設けられた凸形状の保持部22Aa,22Ab,22Ac(図8参照)を分割鏡筒47内で保持するホールドブロック23A,23B,23Cと、ミラー要素22Aの裏面22Aeに−Y方向の荷重を付与する複数の駆動ユニット58よりなる荷重付与系54と、を有する。この変形例のミラー要素22Aの裏面22Aeは反射面22Adに沿って湾曲しているため、複数の駆動ユニット58の接触部61aと接触する裏面22AeにはほぼXZ面に平行な切り欠き部22Afが形成されている。これによって、接触部61aは裏面22Aeに安定に接触できる。
また、図8において、ミラー要素22Aの側面の保持部22Aa,22Ab間に凸部63Aが形成され、保持部22Ab,22Ac間に2箇所の凸部63B,63Cが形成され、保持部22Ac,22Aa間に2箇所の凸部63D,63Eが形成されている。そして、図7に示すように、ミラー要素22Aの凸部63Aと分割鏡筒47との間に、凸部63Aに対して反射面22Adから裏面22Aeに向かう(+Y方向の)一定の荷重を付与するための圧縮コイルばね(以下、予圧ばねという。)64Aが配置されている。なお、説明の便宜上、図7における凸部63Aと保持部22Aaとの位置関係は図8の正しい位置関係とは異なっている。
また、図8に示すように、ミラー要素22Aの側面の他の凸部63B〜63Eと分割鏡筒47との間にも、それぞれ凸部63B〜63Eに対して反射面22Adから裏面22Aeに向かう一定の荷重を付与するための圧縮コイルばね(以下、予圧ばねという。)64B〜64Eが配置されている。5個の予圧ばね64A〜64Eから対応する凸部63A〜63Eに+Y方向に付与される荷重をpfj(j=1〜5)とすると、5個の荷重pfjは個別に最適化された値である。一例として、予圧ばね64A〜64Eから対応する凸部63A〜63Eに付与される荷重は、荷重付与系54の複数の駆動ユニット58からミラー要素22Aの裏面22Aeに付与される荷重と方向が逆である。
このようにこの変形例のデフォーマブルミラー50Aはミラー要素22Aの側面の凸部63A〜63Eに+Y方向への荷重を与える予圧ばね64A〜64Eを有する。この他の構成は図2のデフォーマブルミラー50と同様である。図7の変形例によれば、荷重付与系54からミラー要素22Aの裏面22Aeに−Y方向への荷重fiが付与されていない場合の、ミラー要素22Aの反射面22Adの理想面BDに対する変形量を小さくできる。言い換えると、反射面22Adの理想面BDに対する非球面加工量を低減させることができ、ミラー要素22Aの製造が容易になる。
具体的に、図8の駆動ユニット58の個数が20個である場合に、ミラー要素22Aの5個の凸部63A〜63Eに予圧ばね64A〜64Eによって与える荷重をほぼ4kgf、0.6kgf、5kgf、5kgf、0.6kgfとしたときの、ミラー要素22Aの反射面の非球面加工量を図9(A)に示す。図9(A)において、照明光ILの波長λを用いて、等厚線の間隔はほぼ0.001λの高さの差に相当しており、非球面加工量のRMS(root mean square)はほぼ0.15λであり、非球面加工量の高低差はほぼ0.76λである。
これに対して、駆動ユニット58の個数が20個である場合の、図2のミラー要素22の反射面の非球面加工量を図9(B)に示す。図9(B)において、等厚線の間隔はほぼ0.001λの高さの差に相当しており、非球面加工量のRMSはほぼ1.4λであり、非球面加工量の高低差はほぼ7.17λである。従って、予圧ばね64A〜64Eを設けることによって、ミラー要素22Aの反射面に対する非球面加工量をミラー要素22の場合に対して例えば1/10程度に大幅に低減させることができる。
なお、この変形例では5個の予圧ばね64A〜64Eを設けているが、予圧ばねの個数は任意であり、例えば1個の予圧ばね64Aを設けるだけでもよい。さらに、予圧ばね64A〜64Eは圧縮コイルばねであるが、予圧ばね64A〜64Eとしては板ばね等を使用することもできる。
また、予圧ばね64A〜64Eによって荷重を与える位置は、例えばミラー要素22Aの側面に近い(周辺部の)反射面22Ad又は裏面22Aeであってもよい。
また、予圧ばね64A〜64Eによって荷重を与える位置は、例えばミラー要素22Aの側面に近い(周辺部の)反射面22Ad又は裏面22Aeであってもよい。
次に、上記の実施形態の露光装置EXを用いて半導体デバイス(電子デバイス)を製造する場合、この半導体デバイスは、図10に示すように、デバイスの機能・性能設計を行うステップ221、この設計ステップに基づいてマスク(レチクル)を製作するステップ222、デバイスの基材である基板(ウエハ)を製造するステップ223、露光装置EXによりレチクルのパターンをレジストが塗布された基板(感光基板)に露光する工程、露光した基板を現像してレジストパターンを形成する工程、現像した基板の加熱(キュア)及びエッチング工程などを含む基板処理ステップ224、デバイス組み立てステップ(ダイシング工程、ボンディング工程、パッケージ工程などの加工プロセスを含む)225、並びに検査ステップ226等を経て製造される。
言い換えると、このデバイスの製造方法は、上記の実施形態の露光装置を用いて基板(ウエハ)上に感光層のパターンを形成することと、そのパターンが形成された基板を処理すること(ステップ224)とを含んでいる。この製造方法によれば、その露光装置では非回転対称な収差を含む諸収差を低減できるため、微細パターンを有するデバイスを高精度に製造できる。
なお、本発明は、例えば米国特許出願公開第2007/242247号明細書、又は欧州特許出願公開第1420298号明細書等に開示されている液浸型露光装置の投影光学系の収差補正を行う場合にも適用することができる。また、本発明は、走査型の露光装置のみならず、一括露光型の露光装置(ステッパー等)等にも適用することができる。
また、本発明は、波長数nm〜100nm程度の極端紫外光(EUV光)を露光光として用いる投影露光装置の投影光学系の収差補正を行う場合にも適用できる。露光光としてEUV光を用いる場合には、投影光学系は特定のフィルタ等を除いて複数のミラー(凹面鏡、凸面鏡、平面鏡等)から構成されるため、上記の実施形態のデフォーマブルミラー50,50Aと同様のデフォーマブルミラーは、その複数のミラーのうちの少なくとも1枚のミラーを保持するために使用可能である。
また、本発明は、波長数nm〜100nm程度の極端紫外光(EUV光)を露光光として用いる投影露光装置の投影光学系の収差補正を行う場合にも適用できる。露光光としてEUV光を用いる場合には、投影光学系は特定のフィルタ等を除いて複数のミラー(凹面鏡、凸面鏡、平面鏡等)から構成されるため、上記の実施形態のデフォーマブルミラー50,50Aと同様のデフォーマブルミラーは、その複数のミラーのうちの少なくとも1枚のミラーを保持するために使用可能である。
また、本発明は、半導体デバイス製造用の露光装置への適用に限定されることなく、例えば、角型のガラスプレートに形成される液晶表示素子、若しくはプラズマディスプレイ等のディスプレイ装置用の露光装置や、撮像素子(CCD等)、マイクロマシーン、薄膜磁気ヘッド、及びDNAチップ等の各種デバイスを製造するための露光装置にも広く適用できる。更に、本発明は、各種デバイスのマスクパターンが形成されたマスク(フォトマスク、レチクル等)をフォトリソグフィ工程を用いて製造する際の、露光装置にも適用することができる。
なお、本発明は上述の実施形態に限定されず、本発明の要旨を逸脱しない範囲で種々の構成を取り得ることは勿論である。
EX…露光装置、R…レチクル、W…ウエハ、ILS…照明光学系、PL…投影光学系、6…結像特性制御系、9…収差制御系、22,22A…ミラー(凹面鏡)、23A〜23C…ホールドブロック、39…波面収差計測装置、47…分割鏡筒、50,50A…デフォーマブルミラー、54…荷重付与系、58…駆動ユニット、59…駆動素子、60…荷重センサ、61…圧縮ばね、64A〜64E…予圧ばね
Claims (12)
- 光を反射する変形可能な反射光学素子であって、
光を反射する反射面を有する反射部材と、
前記反射部材の周辺部を保持する保持部と、
前記反射部材の前記反射面の裏面に対して所定方向の力を与えて、前記所定方向に関する第1位置と第2位置との間で、前記反射面を変形させる少なくとも一つの駆動部と、を備え、
前記駆動部から前記裏面に対して前記所定方向の力が付与されていないとき、前記反射面は前記第2位置にあることを特徴とする変形可能な反射光学素子。 - 前記反射部材は、弾性変形可能な材料で形成され、
前記所定方向の力は、前記裏面に向かう方向の力であり、
前記第2位置は、前記反射面の変形可能範囲のうち、前記所定方向に関する前記第1位置よりも前記裏面側にあることを特徴とする請求項1に記載の変形可能な反射光学素子。 - 前記駆動部から前記裏面に対して前記所定方向の力が付与されていないときに、前記反射部材の前記反射面は非球面形状を有することを特徴とする請求項1又は請求項2に記載の変形可能な反射光学素子。
- 前記駆動部から前記裏面に対して前記所定方向の力が付与されていないときに、前記反射部材の前記反射面は、前記裏面側に凹となるように形成されていることを特徴とする請求項1から請求項3のいずれか一項に記載の変形可能な反射光学素子。
- 前記駆動部は、前記反射部材の前記裏面に接触可能に配置された凸状部材と、前記凸状部材を前記裏面側に付勢するアクチュエータとを有することを特徴とする請求項1から請求項4のいずれか一項に記載の変形可能な反射光学素子。
- 前記駆動部は、前記反射部材の前記裏面側に格子状に複数個配置されていることを特徴とする請求項1から請求項5のいずれか一項に記載の変形可能な反射光学素子。
- 前記所定方向の力は、前記裏面に向かう方向の力であり、
前記反射部材の周辺部に、前記裏面に向かう方向の力とは反対方向の力を付与する少なくとも一つの予圧部を備えることを特徴とする請求項1から請求項6のいずれか一項に記載の変形可能な反射光学素子。 - 前記予圧部は、前記反射部材の側面に設けられた凸部に前記反対方向の力を付与することを特徴とする請求項7に記載の変形可能な反射光学素子。
- 複数の光学素子を含む光学系において、
請求項1から請求項8のいずれか一項に記載の変形可能な反射光学素子を備え、
前記光学系の収差に応じて前記駆動部を介して前記反射光学素子の前記反射部材の前記反射面の変形量が制御されることを特徴とする光学系。 - 露光光でパターンを照明し、前記露光光で前記パターン及び投影光学系を介して基板を露光する露光装置において、
請求項9に記載の光学系を備えることを特徴とする露光装置。 - 前記光学系は前記投影光学系であることを特徴とする請求項10に記載の露光装置。
- 請求項10又は請求項11に記載の露光装置を用いて基板上に感光層のパターンを形成することと、
前記パターンが形成された前記基板を処理することと、を含むデバイス製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012023554A JP2013161992A (ja) | 2012-02-06 | 2012-02-06 | 変形可能な反射光学素子、光学系、及び露光装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012023554A JP2013161992A (ja) | 2012-02-06 | 2012-02-06 | 変形可能な反射光学素子、光学系、及び露光装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013161992A true JP2013161992A (ja) | 2013-08-19 |
Family
ID=49173994
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012023554A Pending JP2013161992A (ja) | 2012-02-06 | 2012-02-06 | 変形可能な反射光学素子、光学系、及び露光装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013161992A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014518011A (ja) * | 2011-05-05 | 2014-07-24 | カール・ツァイス・エスエムティー・ゲーエムベーハー | 測定装置を備えた光学モジュール |
| JP2015070214A (ja) * | 2013-09-30 | 2015-04-13 | キヤノン株式会社 | 光学装置、投影光学系、露光装置および物品の製造方法 |
| JP2015222417A (ja) * | 2014-04-28 | 2015-12-10 | 株式会社ブイ・テクノロジー | 露光装置及び露光方法 |
| EP3048486A2 (de) | 2015-01-22 | 2016-07-27 | Carl Zeiss SMT GmbH | Projektionsbelichtungsanlage mit manipulator sowie verfahren zum steuern einer projektionsbelichtungsanlage |
| DE102015222377A1 (de) | 2015-11-13 | 2016-11-24 | Carl Zeiss Smt Gmbh | Projektionsbelichtungsanlage mit einem Manipulatorsystem |
| WO2018141713A1 (en) | 2017-02-03 | 2018-08-09 | Asml Netherlands B.V. | Exposure apparatus |
| CN113168105A (zh) * | 2018-10-23 | 2021-07-23 | 卡尔蔡司Smt有限责任公司 | 通过可调节间隔件将光刻设备的第一元件朝向光刻设备的第二元件调整的方法 |
| WO2023104660A1 (de) | 2021-12-10 | 2023-06-15 | Carl Zeiss Smt Gmbh | Verfahren zum kalibrieren eines manipulierbaren optischen moduls |
-
2012
- 2012-02-06 JP JP2012023554A patent/JP2013161992A/ja active Pending
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014518011A (ja) * | 2011-05-05 | 2014-07-24 | カール・ツァイス・エスエムティー・ゲーエムベーハー | 測定装置を備えた光学モジュール |
| JP2015070214A (ja) * | 2013-09-30 | 2015-04-13 | キヤノン株式会社 | 光学装置、投影光学系、露光装置および物品の製造方法 |
| JP2015222417A (ja) * | 2014-04-28 | 2015-12-10 | 株式会社ブイ・テクノロジー | 露光装置及び露光方法 |
| EP3048486A2 (de) | 2015-01-22 | 2016-07-27 | Carl Zeiss SMT GmbH | Projektionsbelichtungsanlage mit manipulator sowie verfahren zum steuern einer projektionsbelichtungsanlage |
| DE102015201020A1 (de) | 2015-01-22 | 2016-07-28 | Carl Zeiss Smt Gmbh | Projektionsbelichtungsanlage mit Manipulator sowie Verfahren zum Steuern einer Projektionsbelichtungsanlage |
| US9760019B2 (en) | 2015-01-22 | 2017-09-12 | Carl Zeiss Smt Gmbh | Projection exposure apparatus comprising a manipulator, and method for controlling a projection exposure apparatus |
| DE102015222377A1 (de) | 2015-11-13 | 2016-11-24 | Carl Zeiss Smt Gmbh | Projektionsbelichtungsanlage mit einem Manipulatorsystem |
| JP2018124557A (ja) * | 2017-02-03 | 2018-08-09 | エーエスエムエル ネザーランズ ビー.ブイ. | 露光装置 |
| WO2018141713A1 (en) | 2017-02-03 | 2018-08-09 | Asml Netherlands B.V. | Exposure apparatus |
| JP2019015989A (ja) * | 2017-02-03 | 2019-01-31 | エーエスエムエル ネザーランズ ビー.ブイ. | 露光装置 |
| JP2019056943A (ja) * | 2017-02-03 | 2019-04-11 | エーエスエムエル ネザーランズ ビー.ブイ. | 露光装置 |
| KR20190112795A (ko) * | 2017-02-03 | 2019-10-07 | 에이에스엠엘 네델란즈 비.브이. | 노광 장치 |
| TWI710861B (zh) * | 2017-02-03 | 2020-11-21 | 荷蘭商Asml荷蘭公司 | 曝光裝置 |
| US11092903B2 (en) | 2017-02-03 | 2021-08-17 | Asml Netherlands B.V. | Exposure apparatus |
| KR102291903B1 (ko) | 2017-02-03 | 2021-08-24 | 에이에스엠엘 네델란즈 비.브이. | 노광 장치 |
| CN113168105A (zh) * | 2018-10-23 | 2021-07-23 | 卡尔蔡司Smt有限责任公司 | 通过可调节间隔件将光刻设备的第一元件朝向光刻设备的第二元件调整的方法 |
| WO2023104660A1 (de) | 2021-12-10 | 2023-06-15 | Carl Zeiss Smt Gmbh | Verfahren zum kalibrieren eines manipulierbaren optischen moduls |
| DE102021214142A1 (de) | 2021-12-10 | 2023-06-15 | Carl Zeiss Smt Gmbh | Verfahren zum Kalibrieren eines manipulierbaren optischen Moduls |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4174660B2 (ja) | 露光方法及び装置、プログラム及び情報記録媒体、並びにデバイス製造方法 | |
| JP4352458B2 (ja) | 投影光学系の調整方法、予測方法、評価方法、調整方法、露光方法及び露光装置、露光装置の製造方法、プログラム並びにデバイス製造方法 | |
| JP3567152B2 (ja) | リソグラフィック装置、デバイス製造方法、およびその方法により製造したデバイス | |
| JP4384181B2 (ja) | リソグラフィ装置およびデバイス製造方法 | |
| JP2013161992A (ja) | 変形可能な反射光学素子、光学系、及び露光装置 | |
| JP4552337B2 (ja) | 投影光学系の製造方法及び露光装置の製造方法 | |
| US7221460B2 (en) | Optical system in exposure apparatus, and device manufacturing method | |
| TWI305608B (en) | Lithographic apparatus and method of manufacturing a device involving fine structures | |
| US20100290020A1 (en) | Optical apparatus, exposure apparatus, exposure method, and method for producing device | |
| JP2005311020A (ja) | 露光方法及びデバイス製造方法 | |
| US7859643B2 (en) | Apparatus for moving curved-surface mirror, exposure apparatus and device manufacturing method | |
| JP2006261607A (ja) | 液浸露光装置、液浸露光方法及びデバイス製造方法。 | |
| JP2002324752A (ja) | 投影光学系の製造方法及び調整方法、露光装置及びその製造方法、デバイス製造方法、並びにコンピュータシステム | |
| JP2005051147A (ja) | 露光方法及び露光装置 | |
| JP2013106014A (ja) | 変形可能な反射光学素子及びその駆動方法、光学系、並びに露光装置 | |
| JP2013106017A (ja) | 光学素子保持装置、光学装置、及び露光装置 | |
| JP3708075B2 (ja) | リソグラフィ装置およびデバイス製造方法 | |
| JP2001250760A (ja) | 収差計測方法、該方法を使用するマーク検出方法、及び露光方法 | |
| JP5118407B2 (ja) | 光学系、露光装置及びデバイス製造方法 | |
| JP2002319539A (ja) | 仕様決定方法及びコンピュータシステム | |
| JP4147574B2 (ja) | 波面収差計測方法、投影光学系の調整方法及び露光方法、並びに露光装置の製造方法 | |
| JP5434498B2 (ja) | 光学素子の保持装置、光学系、及び露光装置 | |
| WO2004066371A1 (ja) | 露光装置 | |
| JP2007266511A (ja) | 光学系、露光装置、及び光学特性の調整方法 | |
| JP2005236258A (ja) | 光学装置およびデバイス製造方法 |