JP2012505449A - 車両搭載型のナビゲーション装置に関する改善 - Google Patents
車両搭載型のナビゲーション装置に関する改善 Download PDFInfo
- Publication number
- JP2012505449A JP2012505449A JP2011530371A JP2011530371A JP2012505449A JP 2012505449 A JP2012505449 A JP 2012505449A JP 2011530371 A JP2011530371 A JP 2011530371A JP 2011530371 A JP2011530371 A JP 2011530371A JP 2012505449 A JP2012505449 A JP 2012505449A
- Authority
- JP
- Japan
- Prior art keywords
- information
- vehicle
- navigation device
- steering
- road
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3844—Data obtained from position sensors only, e.g. from inertial navigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3848—Data obtained from both position sensors and additional sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
- G01C21/3819—Road shape data, e.g. outline of a route
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3837—Data obtained from a single source
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3863—Structures of map data
- G01C21/387—Organisation of map data, e.g. version management or database structures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3885—Transmission of map data to client devices; Reception of map data by client devices
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096805—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route
- G08G1/096811—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route where the route is computed offboard
Abstract
ナビゲーション装置(200)は、デジタル地図データを含むデータストア(214)に動作可能に結合される処理リソース(202)を備える。場所判定ユニット(288)が更に提供され、場所を判定できる。ナビゲーション装置は、少なくとも車両、車両ステアリング制御の角度位置を感知するステアリングセンサから情報を受信する。感知したパラメータに関する情報は、走行中にナビゲーション装置によりログ記録される。次にサーバ(150)に情報をアップロードすると、情報は、統計的に解析され、他のナビゲーション装置から取得された同様の情報と組み合わされる。統計的解析により、道路車線幅等の補足道路情報を導出できる。そのような補足道路情報はデジタル地図に追加され、更なる安全性の認識及び経路計画を容易にする。
Description
本発明は、車両搭載型のナビゲーション装置及びそれに関連する方法の分野に関する。例えばそのような装置は、一体型車両機器として設置されてもよく、あるいは車両搭載型に構成されるか又は構成可能なポータブル装置であってもよい。
ポータブルコンピューティングデバイス、例えば、GPS(全地球測位システム)信号の受信及び処理機能性を含むポータブルナビゲーション装置(PND)は既知であり、車両搭載型又は他の車両ナビゲーションシステムとして広く採用されている。
一般的に、現在のPNDは、プロセッサ、メモリ(揮発性及び不揮発性のうちの少なくとも一方、並びに一般的にはその双方)及び前記メモリ内に格納された地図データを含む。プロセッサ及びメモリは、ソフトウェアオペレーティングシステムが確立される実行環境を提供するように協働し、また、PNDの機能性の制御を可能にし且つ種々の他の機能を提供するために1つ以上の追加のソフトウェアプログラムが提供されることは一般的なことである。
通常、これらの装置は、ユーザが装置と対話し且つ装置を制御できるようにする1つ以上の入力インタフェースと、ユーザに情報を中継する1つ以上の出力インタフェースとを更に含む。出力インタフェースの例には、表示装置及び可聴出力用スピーカが含まれる。入力インタフェースの例には、オン/オフ動作又は装置の他の特徴を制御する1つ以上の物理ボタン(ボタンは必ずしも装置自体にある必要はなく、装置が車両に内蔵されている場合はステアリングホイール上にあってもよい)及びユーザ音声を検出するマイクが含まれる。特定の1つの構成において、出力インタフェースディスプレイは、ユーザが触れることで装置を動作させる際に使用する入力インタフェースを更に提供するためにタッチセンシティブディスプレイとして(タッチセンシティブオーバレイ若しくはその他を使用して)構成されてもよい。
多くの場合、この種の装置は、電力及びオプションとしてデータ信号を装置に対して送受信する際に使用する1つ以上の物理コネクタインタフェースを含み、オプションとして、セルラ電気通信、並びに例えばBluetooth、Wi−Fi、Wi−Max、GSM、UMTS等の他の信号及びデータネットワークを介する通信を可能にする1つ以上の無線送信機/受信機を含む。
この種のPND装置は、場所データを含む衛星放送信号を受信し且つその後装置の現在地を判定するために処理する際に使用するGPSアンテナを更に含む。
PND装置は、現在の角度及び直線加速度、また、GPS信号から導出された場所情報に関連して速さ、並びに装置及びそれが搭載される車両の相対的な変位を判定するために処理される信号を生成する電子ジャイロスコープ及び加速度計を更に含んでもよい。通常、そのような機能は車両搭載型のナビゲーションシステムに備えるのが最も一般的であるが、PND装置に備えることが得策である場合にはPND装置に備えてもよい。
そのようなPNDの有用性は、主に、第1の場所(一般に、出発地又は現在地)と第2の場所(一般に、目的地)との間の経路を判定する機能にある。装置のユーザは、多種多様な種々の方法、例えば郵便番号、道路名及び番地、以前に格納した「既知」の目的地(有名な場所、公共の場所(運動場又は水泳プール等)又は他の着目地点等)、並びにお気に入りの目的地又は最近訪れた目的地のいずれかにより、これらの場所を入力できる。
一般にPNDは、地図データから出発地の住所の場所と目的地の住所の場所との間の「最善」又は「最適」な経路を算出することがソフトウェアにより可能になる。「最善」又は「最適」な経路は、所定の基準に基づいて判定され、必ずしも最速又は最短の経路である必要はない。運転者を案内する経路の選択は非常に高度である可能性があり、選択された経路は、既存の予測された動的に且つ/又は無線で受信された交通及び道路情報、道路速度に関する履歴情報、並びに道路の選択肢を判定する要因に対する運転者自身の好みを考慮してもよい(例えば運転者は、経路が高速道路又は有料道路を含むべきでないことを指定してもよい)。
更に装置は、道路及び交通状況を継続的に監視し、状況変化によりとられる残りの行程に対して経路を変更することを提案又は選択してもよい。種々の技術(例えば、移動電話データ交換、固定カメラ、GPSフリートトラッキング)に基づくリアルタイム交通監視システムは、交通遅滞を識別し、その情報を通知システムに供給するために使用されている。
この種のPNDは、一般に、車両のダッシュボード又はフロントガラスに搭載されてもよいが、車両のラジオの内蔵コンピュータの一部又は実際には車両自体の制御システムの一部として形成されてもよい。ナビゲーション装置は、PDA(ポータブルデジタルアシスタント)、メディアプレーヤ又は移動電話等のハンドヘルドシステムの一部であってもよい。これらの場合、ハンドヘルドシステムの標準的な機能性は、経路計算及び計算経路に沿うナビゲーションの双方を実行するためにソフトウェアを装置にインストールすることにより拡張される。
経路計画及びナビゲーション機能性は、適切なソフトウェアを実行するデスクトップ又は移動計算リソースにより提供されてもよい。例えば、Royal Automobile Club(RAC)は、http://www.rac.co.ukにおいてオンライン経路計画及びナビゲーション機能を提供する。この機能により、ユーザは出発地及び目的地を入力でき、その後ユーザの計算リソースが接続されるサーバは、経路(経路の方位はユーザにより指定されてもよい)を計算し、地図を生成し、選択した出発地から選択した目的地までユーザを案内するための全ナビゲーション命令の組を生成する。更にこの機能は、計算経路の擬似3次元レンダリングを提供し、ユーザが経路に沿って移動することをシミュレートし且つそれにより計算経路のプレビューをユーザに提供する経路プレビュー機能性を提供する。
PNDにおいて、経路が計算されると、ユーザはオプションとして提案された経路のリストから所望の計算経路を選択するためにナビゲーション装置と対話する。オプションとして、ユーザは、例えば特定の経路、道路、場所又は基準が特定の行程に対して回避されること又は必須であることを指定することにより経路選択処理を仲介又は誘導してもよい。PNDの経路計算の側面は1つの主な機能を形成し、そのような経路に沿うナビゲーションは別の主な機能である。
計算経路に沿うナビゲーション中、そのようなPNDは、経路の終点、すなわち所望の目的地まで選択した経路に沿ってユーザを案内するための視覚命令及び/又は可聴命令を提供するのが一般的である。また、PNDは、ナビゲーション中に画面上に地図情報を表示するのが一般的である。そのような情報は、表示された地図情報が装置の現在地及び従って装置が車両搭載型のナビゲーションに使用されている場合はユーザの現在地又はユーザの車両の現在地を表すように画面上で定期的に更新される。
一般に画面上に表示されたアイコンは、装置の現在地を示し、装置の現在地近傍の現在の道路及び周囲の道路の地図情報と共に中央に置かれ、他の地図の特徴も表示される。更にナビゲーション情報は、オプションとして表示された地図情報の上側、下側又は片側のステータスバーに表示されてもよく、ナビゲーション情報の例には、ユーザが走行する必要のある現在の道路から次の進路変更までの距離が含まれ、場合によってはその進路変更の特性は、例えば左折又は右折である特定の種類の進路変更を示す更なるアイコンで表される。更にナビゲーション機能は、経路に沿ってユーザを案内する際に使用される可聴命令の内容、継続時間及びタイミングを判定する。理解されるように、「100m先で左折」等の単純な命令は、かなりの処理及び解析を必要とする。上述したように、装置とのユーザ対話は、タッチスクリーンによって行われてもよく、更に又はあるいはステアリングコラムリモコン、音声起動又は他の適切なあらゆる方法によって行われてもよい。
装置により提供された更なる重要な機能は、ユーザがナビゲーション中に事前に計算された経路から外れた(偶然又は意図的に)場合、別の経路の方が適切であることをリアルタイム交通状況が指示し且つ装置がそのような状況を自動的に認識することを適切に可能にされる場合、又はユーザが何らかの理由で能動的に装置に経路再計算を実行させる場合の自動経路再計算である。
更に、ユーザが規定した基準で経路を計算できることは既知である。例えばユーザは、装置により景色のよい経路が計算されることを好んでもよく、あるいは交通渋滞が起こる可能性が高いか、起こることが予想されるか又は現在起こっているあらゆる道路を回避することを要求してもよい。次に、装置のソフトウェアは種々の経路を計算し、例えば景色が美しい所としてタグ付けされた着目地点(POIとして既知である)を経路に沿って最も多く含む経路をより有利に重み付けするか、あるいは特定の道路上の交通状況を示す格納情報を使用することにより、起こる可能性のある渋滞又はそのために起こる遅滞のレベルに関して計算経路を順序付けする。更に他のPOIに基づく経路計算及びナビゲーション基準、並びに交通情報に基づく経路計算及びナビゲーション基準が可能である。
経路計算及びナビゲーション機能はPNDの全体的な有用性に対して必須であるが、装置を純粋に情報表示に使用できる。すなわち、装置の現在地に関連する地図情報のみが表示され、経路が全く計算されておらず、装置が現在ナビゲーションを全く実行していない「フリードライビング」用に使用できる。多くの場合、そのような動作モードは、移動するのに使用するように要求される経路をユーザが既に認識しており且つナビゲーション支援を必要としない場合に適用可能である。
上述のこの種の装置、例えばTomTom International B.V.が製造及び供給する920Tモデルは、ユーザがある位置から別の位置までナビゲートできるようにする信頼できる手段を提供する。ユーザがナビゲートしている目的地への経路に精通していない場合、そのような装置は非常に有用である。
上述したように、PNDのメモリは、経路を計算し且つ必要なナビゲーション命令をユーザに提供するためだけでなく、PNDの表示装置を介してユーザに視覚情報を提供するためにも、PNDにより使用された地図データを格納する。
当技術分野において既知であるように、地図情報は、多数の方法で表現され、実際にはPNDにより組み合わせて使用される多数の別個の情報成分を含む。地図情報の1つの態様は、単なる道路の場所に付加的な情報を提供する補足道路情報である。補足道路情報は、路面及び車線幅に関する情報を含んでもよい。一般に、補足道路情報を含む地図情報を取得する2つの方法がある。第1の方法は、政府当局及び独自の地図会社から情報を購入する方法である。しかし、そのような情報の完全性、品質及び現在の妥当性は保証されないだろう。第2の方法は、特別なマッピング機器を搭載した車両を道路網の周囲で走行させ、マッピング機器を使用して情報を収集する方法である。例えば、路面及び車線幅は、車両上に取り付けられた専用のマッピングセンサ及びカメラにより判定されてもよい。しかし、通常の車両は、マッピング可能な測定センサを有さず、その車両の性能を監視及び支援する専用のセンサのみを有する。地図情報を収集するために必要な更なる測定センサ及びカメラをそのような車両に搭載するのは費用がかかる。また、マッピング情報を収集するために広範囲にわたる道路網の周囲で特別な車両を走行させるのは、時間がかかり面倒である。複数の国々を範囲に含む正確な地図を準備しようとする場合、タスクは拡大する。情報を最新の状態に維持するために、既存の地図情報が期限切れになる前にあらゆる道路及び車線の変更を検出できるほど十分頻繁に道路網の周囲で車両を出すことが必要である。
補足道路情報を収集する別の技術を提供するのが望ましいだろう。
本発明は特許請求の範囲において規定される。
本発明は、一般的な車両の標準センサから生成された情報を統計的に解析することにより補足地図情報が推測されるという驚くべき認識に基づく。センサ出力が多種多様な異なる運転条件及び運転イベントにより影響され、且つ種々の車両が種々のセンサを使用するため、これらのセンサは信頼できるマッピング情報源として以前は一蹴されてきた。しかし、情報パターンを識別するための統計的解析から驚くほど正確な補足道路情報が得られる。
この技術の精度は、以下のうちの1つ以上により向上する。
(a)単一のセンサからは直接取得できない情報を推測するために、協働して車両の複数のセンサからの情報を解析すること、
(b)補足地図情報を示すより多様な統計的ピクチャが取得されるように、単一の車両の特定の特徴及びセンサに限定されず、複数の車両からの情報を解析すること、
(c)同じように移動するか又は異なる機会に少なくとも同一の地点を通過する同一の車両からの情報を解析すること。
(b)補足地図情報を示すより多様な統計的ピクチャが取得されるように、単一の車両の特定の特徴及びセンサに限定されず、複数の車両からの情報を解析すること、
(c)同じように移動するか又は異なる機会に少なくとも同一の地点を通過する同一の車両からの情報を解析すること。
本発明の1つの技術は、車両搭載型の(車両とドッキングされたか又は一体型車両搭載機器の一部である)ナビゲーション装置が、通常は車両性能を監視又は支援するために使用された搭載された車両センサから取得された情報をログ記録することである。ログ記録された情報は、データ通信チャネルを介して後でサーバにアップロードされる。サーバは、他の車両において使用された他のナビゲーション装置から同様の情報を受信するのが好ましい。アップロードされた情報の統計的解析は、正確な補足道路情報を推測するために使用される。補足道路情報は、運転の危険要素を警告し且つ経路の安全性を優先させた経路計算を支援するために使用される。
本発明の一態様によると、デジタル地図において示された道路に対する物理的路面情報を判定する技術は:
マイク、車両速度センサ、雨量センサ、サスペンション移動センサ、推測航法センサ、ステアリングセンサから選択された少なくとも車両センサから取得された情報を格納するようにそれぞれ構成される複数の車両搭載型のナビゲーション装置を提供することと;
複数のナビゲーション装置から格納された情報を受信することと;
複数のナビゲーション装置からの格納された情報の特徴から物理的路面情報を判定するために、受信した情報を統計的に解析することとを含むことを特徴とする。
マイク、車両速度センサ、雨量センサ、サスペンション移動センサ、推測航法センサ、ステアリングセンサから選択された少なくとも車両センサから取得された情報を格納するようにそれぞれ構成される複数の車両搭載型のナビゲーション装置を提供することと;
複数のナビゲーション装置から格納された情報を受信することと;
複数のナビゲーション装置からの格納された情報の特徴から物理的路面情報を判定するために、受信した情報を統計的に解析することとを含むことを特徴とする。
物理的路面情報は、窪みの位置、減速帯の位置、路面の凹凸、路面の多孔性のうちの1つ以上から選択されてもよい。
本発明の別の特定の態様によると、道路の車線幅を判定する技術は:
路上の車両のステアリングを示す各車両のステアリングセンサから取得された情報を格納するようにそれぞれ構成される複数の車両搭載型のナビゲーション装置を提供することと;
複数のナビゲーション装置から格納された情報を受信することと;
車線内ステアリング補正の特徴から前記道路に対する車線幅の値を判定するために、受信した情報を統計的に解析することとを含むことを特徴とする。
路上の車両のステアリングを示す各車両のステアリングセンサから取得された情報を格納するようにそれぞれ構成される複数の車両搭載型のナビゲーション装置を提供することと;
複数のナビゲーション装置から格納された情報を受信することと;
車線内ステアリング補正の特徴から前記道路に対する車線幅の値を判定するために、受信した情報を統計的に解析することとを含むことを特徴とする。
本発明の別の態様は、ナビゲーション装置、サーバ及びこれらの技術のうちのいずれかに対する動作の方法、並びに実行可能な符号を使用して本発明を実現するコンピュータプログラム要素を個別に規定する。
これらの実施形態の利点は以下において説明される。これらの実施形態の各々の更なる詳細及び特徴は、添付の従属請求項及び以下の詳細な説明において規定される。
従って、マッピングするように構成されないか又はマッピングすることを意図しない標準の車両搭載型センサから補足道路情報を導出できる装置及び方法を提供できる。ナビゲーション装置によりサーバにフィードバックされた情報から補足地図情報を推測できるため、これによりそのような情報を収集及び更新する負担が軽減される。補足地図情報は、デジタル地図の品質及び精度を向上するために使用され、経路計画の際に種々の安全性の利点を達成できる。
次に、添付の図面を参照して、本発明の少なくとも1つの実施形態を単なる例として説明する。
以下の説明において、同一の図中符号は同一の部分を識別するために使用される。
次に、本発明の実施形態について、特にPNDを参照して説明する。しかし、本発明の教示はPNDに限定されず、経路計画及びナビゲーション機能性を提供するように車両搭載用に構成された方法でナビゲーションソフトウェアを実行するように構成されるどんな種類の処理装置にも例外なく適用可能である。従って、本出願において、ナビゲーション装置は、PND、自動車などの車両、あるいは実際にはポータブル計算リソース、例えば、経路計画及びナビゲーションソフトウェアを実行するポータブルパーソナルコンピュータ(PC)、移動電話、あるいはポータブルデジタルアシスタント(PDA)として実装されるか否かにかかわらず、どんな種類の経路計画及びナビゲーション装置も含むことを意図する(これに限定されない)。
本発明の教示は、ユーザが1つの地点から別の地点までナビゲートする方法に関する命令を要求していないが単に所定の場所のビューを提供してほしい状況においても有用であることが以下から明らかとなるだろう。そのような状況において、ユーザが選択した「目的地」の場所は、ユーザがナビゲートを開始したい対応する出発地を有する必要はないため、本明細書で「目的地」の場所又は実際には「目的地」のビューを参照することは、経路の生成が不可欠であること、「目的地」まで移動する必要があること又は実際には目的地の存在が対応する出発地の指示を必要とすることを意味すると解釈されるべきではない。
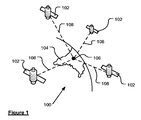
以上の条件を考慮し、図1の全地球測位システム(GPS)等は種々の目的に使用される。一般に、GPSは、連続的な位置、速度、時間及びいくつかの例においては方向情報を無数のユーザに対して判定できる衛星無線ナビゲーションシステムである。以前はNAVSTARとして周知であったが、GPSは極めて正確な軌道で地球の周りを回る複数の衛星を使用する。これらの正確な軌道に基づいて、GPS衛星は、それらの場所を任意の数の受信装置に中継できる。
GPSデータを受信する能力を特別に備える装置がGPS衛星信号に対する無線周波数の走査を開始する場合、GPSシステムは実現される。GPS衛星から無線信号を受信すると、装置は、複数の異なる従来の方法のうちの1つを用いて、その衛星の正確な場所を判定する。殆どの例において、装置は、少なくとも3つの異なる衛星信号を取得するまで信号の走査を継続する(尚、位置は、通常は2つの信号のみでは判定されないが、他の三角測量技術を使用して2つの信号から判定することもできる)。幾何学的三角測量を実現する場合、受信機は、3つの既知の位置を利用して、衛星に対する自身の2次元位置を判定する。これは、周知の方法で行われる。更に、第4の衛星信号を取得することにより、受信装置は、同一の幾何学計算によって周知の方法でその3次元位置を計算できる。位置及び速度データは、無数のユーザにより連続的にリアルタイムで更新可能である。
図1に示されたように、GPSシステム100は、地球104の軌道を回る複数の衛星102を含む。GPS受信機106は、多数の複数の衛星102からスペクトル拡散GPS衛星データ信号108を受信する。スペクトル拡散データ信号108は各衛星102から連続して送信され、送信されたスペクトル拡散データ信号108の各々は、データストリームが発生する特定の衛星102を識別する情報を含むデータストリームを含む。一般にGPS受信機106は、2次元の位置を計算できるように少なくとも3つの衛星102からのスペクトル拡散データ信号108を必要とする。第4のスペクトル拡散データ信号を受信することにより、GPS受信機106が既知の技術を使用して3次元の位置を計算できるようにする。
図2を参照すると、GPS受信装置106を含むか又はGPS受信装置106に結合されたナビゲーション装置200は、必要に応じて、既知のBluetooth技術によるデジタル接続等のデジタル接続を確立するために、例えば移動電話、PDA及び/又は移動電話技術を含むあらゆる装置である移動装置(不図示)を介して「移動」ネットワーク又は電気通信ネットワークのネットワークハードウェアとのデータセッションを確立できる。そうして、そのネットワークサービスプロバイダを介して、移動装置は、サーバ150とのネットワーク接続を(例えば、インターネットを介して)確立できる。そのため、「モバイル」ネットワーク接続は、情報に対する「リアルタイム」又は少なくとも非常に「最新」のゲートウェイを提供するために、ナビゲーション装置200(単体時、及び/又は車載走行時において移動可能であり且つ多くの場合移動している)とサーバ150との間に確立される。
例えばインターネットを使用して、移動装置(サービスプロバイダを介する)とサーバ150等の別の装置との間にネットワーク接続を確立することは、周知の方法で行われうる。この点で、あらゆる数の適当なデータ通信プロトコル、例えばTCP/IP階層プロトコルが採用される。更に移動装置は、あらゆる数の通信規格、例えばCDMA2000、GSM、IEEE802.11a/b/c/g/n等を利用する。
従って、例えばナビゲーション装置200内の移動電話又は移動電話技術を介して、データ接続を介して実現されるインターネット接続が利用されてもよいことが分かる。
図示しないが、ナビゲーション装置200は、当然、ナビゲーション装置200自体に固有の移動電話技術を含んでもよい(例えばアンテナを含むか又はオプションとしてナビゲーション装置200の内臓アンテナを使用する)。ナビゲーション装置200内の移動電話技術は、内部構成要素を含むことができ、且つ/又は例えば必要な移動電話技術とアンテナとの少なくとも一方を備える挿入可能なカード(例えば、Subscriber Identify Module (SIM) card)を含むことができる。そのため、ナビゲーション装置200内の移動電話技術は、任意の移動装置の方法と同様の方法で、例えばインターネットを介して、ナビゲーション装置200とサーバ150との間にネットワーク接続を同様に確立できる。
電話設定の場合、移動電話の機種、製造業者等の多様な範囲に関して正しく動作するために、Bluetooth対応のナビゲーション装置が使用されてもよく、機種/製造業者専用設定は、例えばナビゲーション装置200に格納されてもよい。この情報のために格納されたデータは更新されうる。
図2において、ナビゲーション装置200は、あらゆる多数の異なる構成により実現される汎用通信チャネル152を介してサーバ150と通信中であるように示される。一般的に、通信チャネル152は、ナビゲーション装置200とサーバ150とを接続する伝搬媒体又はパスを示す。サーバ150及びナビゲーション装置200は、サーバ150とナビゲーション装置200との間に通信チャネル152を介した接続が確立される場合に通信する(尚、そのような接続は、移動装置を介したデータ接続、インターネット等を介するパーソナルコンピュータを介した直接接続である)。
通信チャネル152は、特定の通信技術に限定されない。更に、通信チャネル152は、単一の通信技術に限定されない。すなわち、チャネル152は、種々の技術を使用する複数の通信リンクを含んでもよい。例えば、通信チャネル152は、電気通信、光通信、及び電磁通信のうちの少なくとも1つ等のためのパスを提供するように構成されることができる。そのため、通信チャネル152は、電気回路、ワイヤ及び同軸ケーブル等の電気導体、光ファイバケーブル、コンバータ、無線周波数(rf)波、大気、空間等のうちの1つ又はそれらの組み合わせを含むが、それらに限定されない。更に、通信チャネル152は例えば、ルータ、リピータ、バッファ、送信機及び受信機等の中間装置を含むことができる。
1つの図示した構成によれば、通信チャネル152は、電話及びコンピュータネットワークを含む。更に、通信チャネル152は、例えば、マイクロ波周波数通信等の無線周波数通信、赤外線通信、等の無線通信に適応できてもよい。更に、通信チャネル152は衛星通信に適応できる。
通信チャネル152を介して送信される通信信号は、所定の通信技術に必要とされるか又は望まれる信号を含むが、それらに限定されない。例えば、信号は、時分割多元接続(TDMA)、周波数分割多元接続(FDMA)、符号分割多元接続(CDMA)、グローバル・システム・フォー・モバイル・コミュニケーションズ(Global System for Mobile Communications)(GSM)等のセルラ通信技術において使用されるように構成されてもよい。デジタル信号及びアナログ信号の双方が通信チャネル152を介して送信できる。これらの信号は、通信技術にとって望ましい変調信号、暗号化信号、及び圧縮信号のうちの少なくとも1つであってもよい。
サーバ150は、図示しない他の構成要素に加えて、メモリ156に動作可能に接続され且つ有線又は無線接続158を介して大容量データ記憶装置160に動作可能に更に接続されるプロセッサ154を含む。大容量記憶装置160は、ナビゲーションデータ及び地図情報のストアを含む。また、大容量記憶装置160は、サーバ150とは別個の装置であってもよく、サーバ150に組み込まれてもよい。更に、プロセッサ154は、通信チャネル152を介してナビゲーション装置200と情報の送受信を行うために、送信機162及び受信機164に動作可能に接続される。送受信される信号は、データ信号、通信信号及び又は他の伝搬信号を含んでもよい。送信機162及び受信機164は、ナビゲーションシステム200の通信設計において使用される通信要求及び通信技術に従って選択又は設計されてもよい。尚、送信機162及び受信機164の機能は、信号送受信機に組み合わされてもよい。
上述したように、ナビゲーション装置200は、通信チャネル152を介して信号及び/又はデータを送受信するために送信機166及び受信機168を使用して通信チャネル152を介してサーバ150と通信するように構成される。尚、これらの装置は、サーバ150以外の装置と通信するために更に使用される。また、送信機166及び受信機168は、ナビゲーション装置200に対する通信設計において使用された通信要求及び通信技術に従って選択又は設計され、送信機166及び受信機168の機能は、図2に関連して上述されたような単一の送受信機に組み合わされてもよい。当然、ナビゲーション装置200は、本明細書において後で更に詳細に説明される他のハードウェア及び/又は機能部分を含む。
サーバメモリ156に格納されるソフトウェアは、プロセッサ154に命令を提供し、サーバ150がナビゲーション装置200にサービスを提供できるようにする。サーバ150により提供される1つのサービスは、ナビゲーション装置200からの要求の処理及び大容量データ記憶装置160からナビゲーション装置200へのナビゲーションデータの送信を含む。サーバ150により提供される別のサービスは、所望のアプリケーションに対する種々のアルゴリズムを使用したナビゲーションデータの処理及びナビゲーション装置200へのこれらの計算の結果の送出を含む。後で説明されるように、サーバ150により提供される更なるサービスは、ナビゲーション装置200により収集された情報の処理である。
サーバ150は、無線チャネルを介してナビゲーション装置200によりアクセス可能なデータのリモートソースを構成する。サーバ150は、ローカルエリアネットワーク(LAN)、ワイドエリアネットワーク(WAN)、仮想プライベートネットワーク(VPN)等に位置するネットワークサーバを含んでもよい。
サーバ150は、デスクトップ又はラップトップコンピュータ等のパーソナルコンピュータを含んでもよく、通信チャネル152は、パーソナルコンピュータとナビゲーション装置200との間に接続されるケーブルであってもよい。あるいは、パーソナルコンピュータは、ナビゲーション装置200とサーバ150との間に接続されて、サーバ150とナビゲーション装置200との間にインターネット接続を確立してもよい。
ナビゲーション装置200は、情報ダウンロードを介してサーバ150から情報を与えられてもよい。情報は、ユーザがナビゲーション装置200をサーバ150に接続する場合若しくは自動的に周期的に更新されてもよく、且つ/又は例えば無線移動接続装置及びTCP/IP接続を介してサーバ150とナビゲーション装置200との間に接続がより継続して又は頻繁に確立される場合に更に動的に更新されてもよい。多くの動的計算のために、サーバ150内のプロセッサ154が大量の処理要求を処理するために使用されてもよい。しかし、ナビゲーション装置200のプロセッサ(図2には図示していない)も同様に、多くの場合においてはサーバ150への接続に関係なく、多くの処理及び計算を処理できる。
尚、図3を参照すると、ナビゲーション装置200のブロック図は、ナビゲーション装置の全ての構成要素を含むのではなく、単に多くの構成要素の例を示す。ナビゲーション装置200は筐体(不図示)内に配置される。ナビゲーション装置200は、例えば入力装置204及び表示画面206等の表示装置に結合される上述のプロセッサ202を含む処理リソースを含む。本明細書においては単一の入力装置204を参照するが、入力装置204が、キーボード装置、音声入力装置、タッチパネル及び/又は情報を入力するために利用された他のあらゆる既知の入力装置を含むあらゆる数の入力装置を示すことは、当業者には理解されるべきである。同様に、例えば表示画面206は、液晶ディスプレイ(LCD)等のあらゆる種類の表示画面を含む。
一構成において、入力装置204、タッチパネル及び表示画面206の1つの態様は、タッチパッド又はタッチスクリーン入力250(図4)を含む一体型入力表示装置を提供することにより、タッチパネル画面を介した情報の入力(直接入力、メニュー選択等を介した)及び情報の表示の双方が可能となるように一体化される。そのため、ユーザは、表示画面206の一部に触れるだけで複数の表示選択肢のうちの1つを選択できるか、あるいは複数の仮想ボタン又は「ソフト」ボタンのうちの1つを起動できる。この点において、プロセッサ202は、タッチスクリーンと組み合わせて動作するグラフィカルユーザインタフェース(GUI)をサポートする。
ナビゲーション装置200において、プロセッサ202は、接続210を介して入力装置204に動作可能に接続され且つ入力装置204から入力情報を受信可能である。また、プロセッサ202は、情報を出力するために、表示画面206及び出力装置208のうちの少なくとも一方にそれぞれの出力接続212を介して動作可能に接続される。ナビゲーション装置200は、可聴出力装置(例えば、スピーカ)等の出力装置208を含んでもよい。出力装置208がナビゲーション装置200のユーザに対して可聴情報を生成するため、入力装置204も入力音声コマンドを受信するマイク及びソフトウェアを含むことが同様に理解されるべきである。更にナビゲーション装置200は、あらゆる追加の入力装置204及び/又はあらゆる追加の出力装置、例えばオーディオ入出力装置等を更に含む。
プロセッサ202は、接続216を介してメモリ214に動作可能に接続され、接続220を介して入出力(I/O)ポート218との間で情報を送受信するように更に構成される。この場合、I/Oポート218は、ナビゲーション装置200の外部のI/O装置222に接続可能である。外部I/O装置222は、例えばイヤホン等の外部聴音装置を含んでもよいが、これに限定されない。更に、I/O装置222への接続は、例えばハンズフリー動作及び/又は音声起動動作のため、イヤホン又はヘッドフォンへの接続のため、並びに/あるいは例えば移動電話への接続のためのカーステレオユニット等の他の任意の外部装置への有線接続又は無線接続であってもよい。この場合、移動電話接続は、ナビゲーション装置200とインターネット又は例えば他の任意のネットワークとの間のデータ接続を確立するため、及び/又はインターネット又は例えば他の任意のネットワークを介するサーバへの接続を確立するために使用されてもよい。
図3は、接続226を介するプロセッサ202とアンテナ/受信機224との間の動作可能な接続を更に示す。この場合、アンテナ/受信機224は、例えばGPSアンテナ/受信機であってもよい。参照番号224で示されるアンテナ及び受信機は、図示のために概略的に組み合わされるが、アンテナ及び受信機は、別個に位置する構成要素であってもよく、アンテナは、例えばGPSパッチアンテナ又はヘリカルアンテナであってもよいことが理解されるだろう。
当然、図3に示された電子構成要素が従来の方法で1つ以上の電源(不図示)により電力を供給されることは、当業者には理解されるだろう。図3に示された構成要素の種々の構成が考えられることは、当業者には理解されるだろう。例えば、図3に示された構成要素は、有線及び/又は無線接続等を介して互いに通信してもよい。従って、本明細書において説明されたナビゲーション装置200は、ポータブルナビゲーション装置200又はハンドヘルドナビゲーション装置200である。
更に、図3のポータブル又はハンドヘルドナビゲーション装置200は、例えば自転車、バイク、自動車、又は船舶等の電動車両に周知の方法で接続されるか又は「ドッキング」される。その場合、そのようなナビゲーション装置200は、ポータブル又はハンドヘルドナビゲーションとして使用するために、ドッキング場所から取り外し可能である。
図4を参照すると、ナビゲーション装置200は、一体型入力表示装置206及び図2の他の構成要素(内部GPS受信機224、マイクロプロセッサ202、電源(不図示)、メモリシステム214等を含むがそれらに限定されない)を含むユニットであってもよい。
ナビゲーション装置200は、アーム252上に備え付けられても良い。このアーム252は、吸着カップ254を用いて、車両のダッシュボード/窓/等に取り付けても良い。このアーム252は、ナビゲーション装置200がドッキング可能なドッキングステーションの一例である。ナビゲーション装置200は、例えば、アーム252に対してナビゲーション装置200をスナップ接続することで、ドッキングステーションのアーム252にドッキング若しくは接続することができる。ナビゲーション装置200は、アーム252上で回転可能である。ナビゲーション装置200とドッキングステーションとの間の接続を解除するためには、例えば、ナビゲーション装置200上のボタン(不図示)を押下すればよい。ナビゲーション装置200をドッキングステーションに結合し且つナビゲーション装置200をドッキングステーションから切り離す他の同様に適切な構成は、当業者にはよく知られている。
図5を参照すると、ナビゲーション装置200は、車両内にドッキングされた場合に車両の少なくとも1つの電子データバス300と通信する。ナビゲーション装置200は、ドッキングステーションにおける直接接続又は無線接続のいずれかを介してインタフェースユニット301を使用してバス300と通信してもよい。例えばインタフェースユニット301は、車両の無線インタフェース(例えば、Bluetoothインタフェース)であってもよい。データバス300は、車両の種々のセンサモジュール302と制御モジュール304との間で信号を搬送することにより、種々のユニットが通信できるようにする。モジュール302、304は、車両の動作を制御する車両の組込みシステムの一部を形成する。制御モジュールの限定しない例には、エンジン制御ユニット(ECU)304a、トラクション制御モジュール304b、サスペンション及び安定性制御モジュール304c、エアバッグ制御モジュール304d、ワイパ制御モジュール304e、盗難防止モジュール304f、アンチロックブレーキモジュール304g、送信制御モジュール304h、走行制御モジュール304i、気候制御モジュール304j等が含まれてもよい。センサモジュールの限定しない例には、雨量センサ302a、ステアリング位置センサ302b、1つ以上のサスペンション移動センサ302c、外部周囲温度センサ302d、1つ以上の送信及びエンジン性能センサ302e、マイク302f、車両速度センサ302g、駐車支援カメラ302i等が含まれてもよい。センサは、3次元空間において車両の変位の現行の推定値を維持する推測航法位置センサ302hを更に含んでもよい。データバス300により、種々の制御ユニット間における情報の伝達及びセンサからの情報の問合せ又は受信が可能になる。データバス300は、分散型通信ネットワークを実現するために自動車産業において広く使用されるコントローラエリアネットワークバス(CAN−bus)プロトコル等の確立されたデータバスプロトコルに従って動作してもよい。あるいは又は更にバス300を介して通信する1つ以上のセンサ302は、専用の直接接続(不図示)を介して各制御ユニット304と通信してもよい。そのような直接接続は、例えばセンサからの連続信号が制御ユニットにより必要とされる場合又は信号が安全なデータパスを介して送信される必要がある場合に使用されてもよい。バス300から全てのセンサ信号が得られなくてもよいが、本発明の実施形態により使用された情報の種類は、一般に、バス300及び/又はインタフェースユニット301を介して直接的にあるいは間接的に取得可能である。
図6を参照すると、ナビゲーション装置200内において、プロセッサ202及びメモリ214は、協働してナビゲーション装置200の機能ハードウェア構成要素280と装置により実行されたソフトウェアとの間のインタフェースとして機能するBIOS(基本入出力システム)282をサポートする。プロセッサ202は、メモリ214からのオペレーティングシステム284をロードする。これにより、アプリケーションソフトウェア286(上述の経路計画及びナビゲーション機能性の一部又はすべてを実現する)が実行できる環境を提供する。アプリケーションソフトウェア286は、ナビゲーション装置の中核機能、例えば地図閲覧、経路計画、ナビゲーション機能及びそれらと関連付けられた他のあらゆる機能をサポートするGUIを含む動作環境を提供する。アプリケーションソフトウェア286は、位置判定モジュール288、経路計画モジュール290、地図閲覧生成モジュール292及びデータログ記録モジュール294を含んでもよい。
本発明の原理に従って、データログ記録モジュール294の機能のうちの1つは、車両のデータバス300に関する情報を監視すること及びデジタル地図に対して補足道路情報を収集するのに有用な情報をログ記録することである。車両のセンサモジュール302は、地図情報を収集することを意図せず且つ確かに特にこのために構成されないが、センサ302のうちのいくつかにより生成された情報は、統計的解析を使用して補足道路情報を導出するのに驚くほど有用である。ナビゲーション装置によりログ記録されたセンサデータは、データがプールされ且つ統計的解析が実行されるサーバ150にアップロードされる。統計的精度は、同一の経路を複数回移動する同一の車両から収集されたセンサデータを解析し且つ/あるいは種々の車両から収集されたデータを共に組み合わせることにより、著しく向上する。多数のデータソースを収集することにより、通常平均的な車両において得られる種類のセンサ情報から予想できるものよりも驚くほどより正確な補足道路情報が提供される。
図7を参照すると、データログ記録モジュール294は、少なくとも1つの情報源から情報入力を受け入れる。情報入力は以下から選択されてもよい:
−車両の名前及び種類を識別する識別情報310。そのような情報は、インタフェースユニット301から取得可能であってもよい。
−車両速度312。この情報は、車両の速度センサ302gから得られてもよく且つ/あるいは位置の変化率に従ってナビゲーション装置200内で計算されてもよい。
−車両のステアリングセンサ302bから得られるステアリングホイールの角度位置314。
−車両の雨量センサ302aから得られる雨量検出316。
−周囲の車両騒音を示すマイク信号318。この信号は、車両のマイク302f及び/又は提供された場合はナビゲーション装置のマイクから取得されてもよい。
−車両の1つ以上のサスペンション移動センサ302cから取得可能なサスペンション移動320。
−提供された場合は車両の推測航法センサ302hから取得可能な推測航法位置322。
−実際の日時情報324。最新の日時情報は、ナビゲーション装置200内で自動的に維持されるが、車両のインタフェースユニット301から更に得られてもよい。
−車両のリアルタイムの位置を示し且つその位置を地図上の道路に一致させるナビゲーション装置内で取得された位置情報326。
−提供された場合は駐車支援カメラ302hから出力された画像。
−車両の名前及び種類を識別する識別情報310。そのような情報は、インタフェースユニット301から取得可能であってもよい。
−車両速度312。この情報は、車両の速度センサ302gから得られてもよく且つ/あるいは位置の変化率に従ってナビゲーション装置200内で計算されてもよい。
−車両のステアリングセンサ302bから得られるステアリングホイールの角度位置314。
−車両の雨量センサ302aから得られる雨量検出316。
−周囲の車両騒音を示すマイク信号318。この信号は、車両のマイク302f及び/又は提供された場合はナビゲーション装置のマイクから取得されてもよい。
−車両の1つ以上のサスペンション移動センサ302cから取得可能なサスペンション移動320。
−提供された場合は車両の推測航法センサ302hから取得可能な推測航法位置322。
−実際の日時情報324。最新の日時情報は、ナビゲーション装置200内で自動的に維持されるが、車両のインタフェースユニット301から更に得られてもよい。
−車両のリアルタイムの位置を示し且つその位置を地図上の道路に一致させるナビゲーション装置内で取得された位置情報326。
−提供された場合は駐車支援カメラ302hから出力された画像。
上記の情報源の全てが得られなくてもよく且つナビゲーション装置により使用されなくてもよい。あるいは、より多くの情報源が得られてもよく且つナビゲーション装置により使用されてもよい。上記の情報源は、後で説明される例に対して有用な情報源のリストにすぎない。
データログ記録モジュール294は、情報入力310〜326を受信する第1の信号解析及び/又は圧縮符号化セクション330と、第2の情報記録セクション332とを含む。第1のセクション330は、情報量を第2のセクションにより更に効率的に記録できるレベルに減らすように働く。第2のセクション332は、記録がサーバ150にアップロードされる準備ができるまで(ログ記録ステップ294の後に実行されたステップ336において)情報を記録する。第2のセクション332は、ナビゲーション装置のトリップログ記録機能の一部を形成してもよい。一形態において、第1のセクション330が圧縮符号化を実行するため、信号レベルは圧縮形式で連続的に記録される。ランレングス符号化、デルタ符号化、予測符号化、シンボル符号化を含むがそれらに限定されないあらゆる適切な圧縮符号化が使用されてもよい。あるいは、第1のセクション330は、信号を連続的に圧縮しないように構成されてもよいが、参照データベース334に格納されたパターンモデルにより識別されたように、1つ以上の着目パターンを代わりに認識してもよい。着目パターンが認識される場合、イベントを特徴付ける情報及び信号を示す情報「イベント」が第1のセクション330により生成される。後で例を説明する。着目イベントのみが記録されるため、イベント符号化はより効率的であってもよい。これにより、後でサーバにアップロードされるデータ量を更に減らす。しかし、イベント符号化は、ナビゲーション装置200内でより多くの処理オーバヘッドを必要とするだろう。
次に、補足道路情報を導出するために情報源310〜324を使用する方法の限定しない例を説明する。補足道路情報の種類は、道路の危険要素を判定し且つ特に悪い気象条件において道路の安全を定量化するのに有用である。後で説明するように、これは、安全性の高いナビゲーション経路の計算を支援するために使用される。
図8に示された第1の例を参照すると、車線342の幅340の表示は、運転者が車両のステアリングをどのように補正するかを解析することにより取得されてもよい。通常、運転者は、正確に車線342の中央を走行するのではなく、車線周縁部の縁内でセンターライン344の左右を揺れ動く傾向がある。自動車がセンターラインのいずれかの側の車線周縁部に対してドリフトするため、運転者はステアリングを適当に、通常は僅かに補正する。ステアリング補正、その頻度及び/又は振幅、並びに車両の種類及び速度を解析することにより、車線幅340の統計的指示を提供する。統計的精度は、多数の車両及び/又は同一の経路を移動する同一の車両から取得された情報を組み合わせることにより著しく向上する。
図9(a)を参照すると、センサ情報を記録する1つの方法は、位置及び道路情報326、車両速度312、ステアリング角度314、並びに実際の日時情報324から選択された連続情報源を圧縮符号化することである。そのような情報は、ステアリングホイールの位置によりステアリングを補正する地点346(図8)を識別するために後で解析される。図9(b)を参照すると、別の技術は、リアルタイムに情報信号326、312、314及び324を解析し且つステアリングが補正される地点346に対応する情報のパターンを検出することである。情報「イベント」はステアリング補正地点346毎に生成される。イベントは、イベントの種類(車線ステアリング補正)及び/又はイベント指数を示すイベント識別子348、地点346における位置及び道路情報326、地点346における速度、地点346に対する実際の日時情報324、並びにステアリング補正の振幅(例えば、ステアリングを補正するためにステアリングホイールが回転される角度)のうちの1つ以上を含む特性情報を含む。連続信号ではなくイベントのみを記録することにより、ステップ332において記録されたデータ量を減らし、重要なイベントが既に判別されているため後の処理を簡略化する。
以下の第2〜第4の例は、道路を規定する物理的表面に関する補足道路情報を示す。
図10を参照すると、第2の例は、窪み又は減速帯等の路面における運転障害物352の検出である。そのような障害物がある場合、車両は大幅なサスペンション移動を示して障害物を通過するか、あるいは破線350で示されたように運転者は障害物352の周囲で操作するかのいずれかである。双方とも、特に操作352は、一般に低速で行われる。サスペンション移動の場合、2つの状態が判別されるだろう。減速帯を通過する場合、サスペンションは、最初にホイールが上昇するにつれ圧縮され、次にホイールが下降するにつれ拡張する。窪みを通過する場合、逆が発生する。サスペンションは、最初にホイールが穴に下降するにつれ拡張され、次にホイールが穴から上昇するにつれ圧縮する。また、サスペンション移動情報320の特性に依存して、障害物を通過中の車両のホイールを識別できてもよく、それにより障害物の相対位置を識別できる。単一の車両により1回のそのようなサスペンション移動又は操作が行われることは、減速帯又は窪みのような障害物を明確に示さない。しかし、種々の車両の全てが、障害物を回避するためのサスペンション移動又はステアリングのいずれかを同一の位置で示す場合、これは、道路における減速帯又は窪み等の永続的な特徴を統計的に示す。同一の車両が同一の道路を移動するか又は多数の車両が毎回センサデータを収集しながら同一の道路を移動するほど、統計的精度は向上する。
図11(a)を参照すると、センサ情報を記録する1つの方法は、位置及び道路情報326、車両速度312、ステアリング角度314、サスペンション移動320、並びに実際の日時情報324から選択された連続情報源を圧縮符号化することである。そのような情報は、障害物又は操作350(図10)の種類を識別するために後で解析される。図11(b)を参照すると、別の技術は、リアルタイムで情報信号326、312、314、320及び324を解析し且つ障害物352を通過すること又は障害物352を回避するための操作350に対応する情報のパターンを検出することである。情報「イベント」は検出毎に生成される。イベントは、イベント(運転障害物)の種類を示すイベント識別子354、検出が実行される位置及び道路情報326、車両速度312、実際の日時情報324、運転者により実行されたステアリングの程度に基づく障害物の周囲の偏差量、サスペンション移動量及び種類のうちの1つ以上を含む特性情報を含む。連続信号ではなくイベントのみを記録することにより、ステップ332において記録されたデータ量を減らし、重要なイベントが既に判別されているため後の処理を簡略化する。上記の例において、単一のイベント種類は、障害物を通過すること又は障害物の周囲をステアリングすることの双方を検出し且つ説明するために使用され、単一のイベントにおいてステアリング情報及びサスペンション移動情報の双方を組み合わせる。あるいは、必要に応じて、2つの異なる個別のイベントは、(i)障害物の周囲のステアリング及び(ii)障害物を通過する場合のサスペンション移動を検出し且つ説明するために使用される。更に、異なるイベントは、(i)窪みを通過し且つ(ii)減速帯を通過する場合に異なる種類のサスペンション移動を検出し且つ説明するために更に使用される。
図12a及び図12bを参照すると、補足道路情報の第3の例は、道路の状態、すなわち平坦か又は凹凸かである。一般に平坦な表面は、舗装された表面(例えば、アスファルト、タールマカダム又は他の完成した舗装を含む)を示す。一般に非平坦な表面は、煉瓦の表面又は舗装されていない表面(例えば、凹凸がある道路又は土の道路)を示す。そのような情報は、サスペンション移動センサ302cから取得されたサスペンション移動情報入力320から導出可能である。図12(a)を参照すると、サスペンションが不定期の窪みに対処するように移動するため、一般に平坦な道路は、不定期のスパイクを含む平坦な信号により示される。図12(b)を参照すると、一般に舗装されていない道路が非平坦な信号により示される結果、車両が凹凸の舗装されていない表面上を移動するため、サスペンションがほぼ連続して移動する。信号は、車両が凹凸の路面上で跳ね返る際の車両の動きの結果であるが、同様の情報パターンは推測航法センサにより更に生成される。この場合も、車両が同一の道路を移動する回数又は多数の車両が同一の道路を移動し且つ毎回センサデータを収集する回数が多いほど、統計的精度は著しく向上する。
図13(a)を参照すると、センサ情報を記録する1つの方法は、位置及び道路情報326、車両速度312、サスペンション移動320(及び/又は推測航法情報322)、並びに実際の日時情報324から選択された連続情報源を圧縮符号化することである。そのような情報は、路面が平坦か又は凹凸の表面に対応するかを識別するために後で解析される。図13(b)を参照すると、別の技術は、リアルタイムで情報信号326、312、320/322及び324を解析すること、並びに種々の路面状態に対応する情報のパターンを検出することである。情報「イベント」は、路面状態が大幅に変化する度に及び/又は車両が地図上の一方の道路から他方の道路に移動する場合は常に生成される。イベントは、イベントの種類(平坦/凹凸の路面状態)を示すイベント識別子354、検出が行われる位置及び道路情報326、車両速度312、実際の日時情報324、並びに路面の種類(平坦又は凹凸)のうちの1つ以上を含む特性情報を含む。連続信号ではなくイベントのみを記録することにより、ステップ332において記録されたデータ量を減らし、重要なイベントが既に判別されているため後の処理を簡略化する。
図14及び図15を参照すると、補足道路情報の第4の例は、舗装道路の場合に舗装が非多孔性であるか又は多孔性であるかである。非多孔性の舗装の一例は従来のタールマカダム舗装である。雨の場合、水は、一般に表面に浸透するのではなく、路面上を表面排水に流れる。多孔性の舗装の一例は、雨水が路面の下に浸透するように粒子状物質間に空隙を有する多孔性のタールマカダム舗装である。これは、排水を促進し且つ路面上に水たまりがたまる危険性を低くすると考えられる。センサ情報は、現在の路面が多孔性であるか又は非多孔性であるかを直接示さなくてもよいが、車両が一方の道路の種類から他方の道路の種類に通過する時を検出できる。図14を参照すると、マイク信号318から取得された車両のタイヤの周囲の転動音量により、一例が提供される。多孔性の表面における空隙が騒音の一部を吸収するため、転動音は多孔性の路面上を移動する場合は大幅に軽減される。車両速度(及び/又はエンジン速度)が上がらずに周囲の道路騒音が著しく急激に増加することは、車両が多孔性の舗装から非多孔性の舗装に通過したことを示すだろう。逆に、車両速度(及び/又はエンジン速度)が下がらずに周囲の道路騒音が著しく急激に減少することは、車両が非多孔性の舗装から多孔性の舗装に通過したことを示すだろう。この例の精度は、道路上の同一の地点を通過する同一の特徴が複数回観察される(例えば、他の車両から又は後で同一の車両から)場合に向上する。
図15を参照すると、雨量センサ302aが道路のしぶきに応答するタイプのものであるである場合、別の例は雨量センサ302aにより検出された雨量であってもよい。路面上で収集する表面の水量は、一般に非多孔性の舗装の場合により多い。その結果、水が車両のタイヤにより路面からはねられるため、しぶきは大幅に増加するだろう。検出された雨の著しい急激な増加又は減少は、それぞれ、多孔性の舗装から非多孔性の舗装に通過すること、あるいは非多孔性の舗装から多孔性の舗装に通過することを示すだろう。この例の精度は、車両が非多孔性の舗装から多孔性の舗装に通過したことである。この例の精度は、道路上の同一の地点を通過する同一の特徴が複数回観察される(例えば、他の車両から又は後で同一の車両から)場合に向上する。
別の例は、上述したように、検出された騒音及び/又は雨における急激な変化のいずれかと関連付けられた車両の速度であってもよい。非多孔性の舗装から多孔性の舗装に通過する場合、運転者は、道路上の表面の水量が減少してより良い運転条件を知覚するため、徐々に速度を上げる傾向があることが観察される。
図16(a)を参照すると、センサ情報を記録する1つの方法は、位置及び道路情報326、車両速度312、周囲の騒音318、検出された雨量316、並びに実際の日時情報324から選択された連続情報源を圧縮符号化することである。そのような情報は、上記の情報パターンが多孔性の道路舗装と非多孔性の道路舗装との間を通過することに対応するかを1回以上識別するために後で解析される。図16(b)を参照すると、別の技術は、リアルタイムに情報信号326、312、320/322及び324を解析すること、並びに種々の路面状態に対応する情報のパターンを検出することである。情報「イベント」は、多孔性の道路舗装と非多孔性の道路舗装との間の変化を示す上記の情報パターンのうちの1つが検出される度に生成される。イベントは、イベントの種類(多孔性/非多孔性の舗装)を示すイベント識別子354、検出が行われる位置及び道路情報326、車両速度312、実際の日時情報324、並びに検出された情報のパターンのうちの1つ以上を含む特性情報を含む。連続信号ではなくイベントのみを記録することにより、ステップ332において記録されたデータ量を減らし、重要なイベントが既に判別されているため後の処理を簡略化する。
図17を参照すると、サーバ150は、各通信チャネル152を介してナビゲーション装置と通信することにより、複数のナビゲーション装置200によりログ記録されたデータを受信する。上述したように、ナビゲーション装置200が通信する種々の手段がある。1つの一般的な技術は、ナビゲーション装置200をユーザのホームコンピュータ又はPCに接続すること及びサーバ150との通信を確立するためにコンピュータのインターネット接続を使用することである。そのような接続の間、ログ記録されたデータはサーバ150にアップロードされる(図7のステップ336)。ナビゲーション装置200により使用されたデジタル地図に対する更新は、デジタル地図を最新の状態に維持するようにサーバからダウンロードされる。ナビゲーション装置に対するあらゆるソフトウェア又はファームウェアの更新は、サーバ150から更にダウンロードされる。サーバ150のある特定の構成要素は、図2に関連して既に説明された。これらの構成要素は、複数の装置から受信したログ記録されたデータを格納するライブラリ400、信頼できる補足道路情報を示す情報パターンを識別するためにライブラリ400においてログ記録されたデータの集合を解析する統計的解析器402及び新しい補足道路情報でデジタル地図を更新するデジタル地図更新器404の形態で処理リソースを規定するように機能する。補足道路情報は、デジタル地図と統合されてもよく又はデジタル地図と共に使用される別個の情報成分の一部を形成してもよい。更新されたデジタル地図、すなわちその構成要素は、その後ナビゲーション装置200にダウンロードされる(通常、後で又は後続の通信セッションにおいて)。
本実施形態の非常に有利な特徴は、サーバがナビゲーション装置200から自動的に情報を受信することである。ユーザがより頻繁に車両においてナビゲーション装置を使用し且つ更新のためにサーバ150に接続するほど、サーバに供給する情報量は増え且つ解析器402により推測された補足道路情報はより正確である。これにより、特別に搭載されたマッピング車両がなくても、補足道路情報を取得でき且つ最新の状態に維持できる。
車線幅情報と、速度情報と、他の補足道路情報とを組み合わせることにより、道路の種類、例えば高速道路、通過道路、ローカル目的地道路等を推論できる。
図18は、例えばナビゲーション装置200において使用されてもよい経路計算アルゴリズム410に対して選択された情報入力を概略的に示す。情報入力は、出発(又は現在の)位置/住所412、運転者が到着したい目的地位置/住所414及び運転者が途中で訪問したい1つ以上の経由地416を含む。入力は、経路を計算するために主な要素を選択すること418を更に含む。例には、最適な速度(目的地に迅速に到着するための)、安全性(特に悪天候における事故の危険性を最小限にするための)、通行料がかからない(有料道路を回避するため)、景色のよい(景色のよい眺望を含む経路を見つけるか又は着目地点を通過するため)及び平坦(凹凸がある道路、あるいは結果として加速された車両の摩耗を招く減速帯又は窪みを含む道路を回避するため)が含まれる。情報入力は、経路計算を実行し且つ補足道路情報を含むデジタル地図の構成要素を更に含む。
補足道路情報は、(i)運転者に道路の障害物及び危険要素を警告し且つ(ii)運転者が安全な経路を希望する場合に経路計算を向上するように道路の安全性を定量化するのに非常に有用である。例えば車線幅は、安全性の一例を提供する。車両が接触する危険性がより低く且つ走行中に巧みに移動するための余地がより多いため、より広い道路は一般により安全な道路と同等に考えられてもよい。平坦な道路は、凹凸がある道路より更に安全であり、一般車両に対してより適切だろう。多孔性の道路は路面からより適切に排水し且つ車両が路面の水膜で滑る危険を招く要因となる路面上にたまる水量を減らすため、多孔性の舗装道路は、大雨の場合には非多孔性の舗装道路より安全だろう。特に悪天候においてそのような危険要素の視認性が制限されるため、窪み等の障害物又は危険要素を回避することは、更に安全性を高めるだろう。そのような情報は、歩行者の密度が高くなる危険性のある学校及び宗教施設の場所等、他の安全性に関連した情報と組み合わせて使用されてもよい。
更に又はあるいは、道路の障害物及び危険要素に関する情報、並びに道路状態に関する情報は、平坦な経路を見つけるのに有用である。
最も安全な道路を判断するために、天気予報情報が更に組み合わされてもよい。潜在的な運転安全性の問題、障害物及び危険要素のプレトリップ警告が生成されてもよい。
車両が駐車支援カメラ302i等のカメラを含む場合、カメラ出力はデータログ記録モジュール294により更に使用されてもよい。他のセンサ出力情報に基づいて対象の信号パターンが識別されているため、カメラ画像はデータログ記録モジュール294により撮像及び記録される。画像は、情報解析を支援するために後でサーバ150にアップロードされてもよい。更に又はあるいは、その位置が対象の道路のうちの1つと一致することをナビゲーション装置が検出する場合、サーバ150は、撮影される対象の1つ以上の道路のリストでナビゲーション装置を構成してもよい。
経路計画に加え、道路における窪みの発生を確実に検出する機能により、そのような情報を適宜商業ベースで道路整備を担う会社又は機関に提供できる。
上記詳細な記述において説明した実施形態はGPSを参照するが、ナビゲーション装置は、GPSの代わりに(又は実際にはGPSに加えて)あらゆる種類の位置感知技術を利用してもよい。例えばナビゲーション装置は、欧州Galileoシステム等の他のグローバルナビゲーション衛星システムを利用してもよい。同様に、ナビゲーション装置は、衛星を用いたものに限定されず、装置が地理的場所を判定できるようにする地上ビーコン又は他のあらゆる種類のシステムを使用して容易に機能する。
本発明の別の実施形態は、コンピュータシステムと共に使用するためのコンピュータプログラムとして実現される。コンピュータプログラムは、例えばディスケット、CD−ROM、ROM又は固定ディスク等の有形のデータ記録媒体に格納された一連のコンピュータ命令であり、あるいはマイクロ波又は赤外線等の有形の媒体又は無線媒体を介して送信されるコンピュータデータ信号において具体化される。一連のコンピュータ命令は、上述の機能性の全て又は一部を構成し、半導体メモリ装置、磁気メモリ装置、光メモリ装置又は他のメモリ装置等の揮発性又は不揮発性のあらゆるメモリ装置に更に格納される。
好適な実施形態はソフトウェアを使用してある特定の機能性を実現するが、その機能性がハードウェア単独で(例えば、1つ以上のASIC(特定用途向け集積回路)を使用して)又は実際にはハードウェアとソフトウェアとの組み合わせにより同様に実現されることは、当業者には更によく理解されるだろう。従って、本発明の範囲は、ソフトウェアにおいて実現されることのみに限定するものとして解釈すべきではない。
また、最後に、添付の特許請求の範囲は本明細書において説明された特徴の特定の組合せについて述べるが、本発明の範囲は、以下において請求された特定の組合せに限定されるのではなく、特定の組合せが今回添付の特許請求の範囲において具体的に列挙されているか否かに関係なく本明細書において開示された特徴又は実施形態のあらゆる組合せを含む。
Claims (17)
- デジタル地図を示すデータを含むデータストアに動作可能に結合された処理リソースと;
前記処理リソースに動作可能に結合され且つ場所を判定できる場所判定ユニットと;
車両ステアリング制御の角度位置を感知する少なくともステアリング位置センサから取得された感知した情報を搬送するために、車両内データシステムと通信する車両通信インタフェースと;
サーバと通信するサーバ通信インタフェースとを備える車両搭載型のナビゲーション装置であって、
前記処理リソースが:
(i)前記車両通信インタフェースを介してステアリングの角度位置を示す前記感知した情報を受信し;
(ii)前記感知した情報から取得された情報及び前記場所判定ユニットにより判定された感知した情報の発生に対応する前記車両の位置を前記データストアに選択的に格納し;
(iii)車線幅を判定するサーバにアップロードするために、ログ記録された情報を前記サーバ通信インタフェースに選択的に出力するように構成されることを特徴とするナビゲーション装置。 - 前記処理リソースは、前記感知した情報の前記発生に対応する車両速度を示す情報を格納するように更に動作可能であることを特徴とする請求項1記載のナビゲーション装置。
- 前記車両速度は、前記車両の速度センサから前記車両通信インタフェースを介して取得されることを特徴とする請求項2記載のナビゲーション装置。
- 前記車両速度は、前記場所判定ユニットにより判定された位置の変化率を計算することにより取得されることを特徴とする請求項2記載のナビゲーション装置。
- 前記ナビゲーション装置はポータブルナビゲーション装置であり、前記車両通信インタフェースは無線インタフェースであることを特徴とする請求項1乃至4のいずれか1項に記載のナビゲーション装置。
- 前記処理リソースは、前記感知したステアリング位置情報を解析し、車線内ステアリング補正の発生を判定し且つ車線内ステアリングステアリング補正の各々の発生を規定する情報を格納するように構成されることを特徴とする請求項1乃至5のいずれか1項に記載のナビゲーション装置。
- 車両において使用可能である複数のナビゲーション装置と通信する装置であり:
ナビゲーション装置にアップロードするためのデジタル地図情報を示すデータを含むデータストアに動作可能に結合された処理リソースと;
ナビゲーション装置と通信し、且つ前記ナビゲーション装置に情報をダウンロードし及び前記ナビゲーション装置から情報をアップロードするように構成された通信インタフェースとを備える装置であって、
前記処理リソースが:
走行中の前記車両のステアリング及び前記ステアリング時の前記対応する車両の位置を示す格納された情報を少なくとも1つのナビゲーション装置から受信し;
前記車両により使用された道路の推定された車線幅をそれから判定するために前記情報を統計的に解析するように構成されることを特徴とする装置。 - 前記格納された情報はステアリング時の車両速度を示す情報を更に含み、前記処理リソースは、車線内ステアリング補正に統計的に対応するステアリングの繰り返しの頻度、車線内ステアリング補正に統計的に対応するステアリングの振幅、車両速度、のうちの1つ以上に基づいて前記車線幅を判定するように構成されることを特徴とする請求項7記載の装置。
- 前記処理リソースは、ステアリングの連続記録を示すサンプルデータストリームとして前記格納された情報を受信するように構成されることを特徴とする請求項7又は8記載の装置。
- 前記処理リソースは、各々が車両ステアリングにおける変化に対応する一連の情報イベントとして前記格納された情報を受信するように構成されることを特徴とする請求項7又は8記載の装置。
- 前記処理リソースは、複数のナビゲーション装置から受信した前記情報を統計的に組み合わせるように更に構成されることを特徴とする請求項7、8、9又は10記載の装置。
- 車両搭載型のナビゲーション装置の動作の方法であり:
前記ナビゲーション装置の場所を判定するために場所判定を実行するステップと;
車両ステアリング制御の角度位置を感知する少なくともステアリング位置センサから取得された感知した情報を搬送するために、前記ナビゲーション装置と車両内データシステムとの間で通信を確立するステップとを含む方法であって、
ステアリングの角度位置を示す前記感知した情報を受信し;
前記感知した情報から取得された情報及び前記場所判定ステップにより判定された感知した情報の発生に対応する前記車両の前記位置を少なくとも1つの車両の移動中に選択的に格納し;
前記ナビゲーション装置とサーバ装置との間の通信を確立し;
出力された情報を使用して車線幅を判定する前記サーバに前記格納された情報を選択的に出力することを特徴とする方法。 - 複数のナビゲーション装置と通信する装置の動作の方法であり:
前記複数のナビゲーション装置のうちの少なくとも1つとの通信を確立するステップを有する方法であって、
走行中の前記車両のステアリング及び前記ステアリング時の対応する車両位置を示す格納された情報を前記少なくとも1つのナビゲーション装置から受信し;
前記情報を統計的に解析し、それらから前記車両により使用された前記道路の推定された車線幅を判定することを特徴とする方法。 - 前記解析するステップは、少なくとも1つの道路に対する情報を共有する複数のナビゲーション装置からの情報を解析することを含むことを特徴とする請求項13記載の方法。
- プロセッサリソースにより実行された場合、前記プロセッサリソースが請求項12乃至14のいずれか1項に記載の方法を実現するようにするコンピュータプログラムコードを含むことを特徴とするコンピュータプログラム。
- コンピュータ可読媒体上で具体化された請求項15に記載のコンピュータプログラム。
- 道路の車線幅を判定する方法であって:
路上の車両のステアリングを示す各車両のステアリングセンサから取得された情報を格納するようにそれぞれ構成される複数の車両搭載型のナビゲーション装置を提供することと;
前記複数のナビゲーション装置から前記格納された情報を受信することと;
車線内ステアリング補正の特徴から前記道路に対する車線幅の値を判定するために、前記受信した情報を統計的に解析することとを有することを特徴とする方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2008/063484 WO2010040404A1 (en) | 2008-10-08 | 2008-10-08 | Improvements relating to navigation apparatus used in-vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012505449A true JP2012505449A (ja) | 2012-03-01 |
Family
ID=40752878
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011530371A Withdrawn JP2012505449A (ja) | 2008-10-08 | 2008-10-08 | 車両搭載型のナビゲーション装置に関する改善 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US20110224901A1 (ja) |
| EP (1) | EP2344843A1 (ja) |
| JP (1) | JP2012505449A (ja) |
| KR (1) | KR20110063823A (ja) |
| CN (1) | CN102037317A (ja) |
| AU (1) | AU2008362588A1 (ja) |
| BR (1) | BRPI0822748A2 (ja) |
| CA (1) | CA2725780A1 (ja) |
| TW (1) | TW201017126A (ja) |
| WO (1) | WO2010040404A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013525771A (ja) * | 2010-04-21 | 2013-06-20 | トムトム インターナショナル ベスローテン フエンノートシャップ | 電子地図にわたり経路を生成するシステム及び方法 |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI371576B (en) * | 2008-09-03 | 2012-09-01 | Compal Communications Inc | Navigation system capable of updating map data and method thereof |
| US9140325B2 (en) * | 2009-03-19 | 2015-09-22 | Fox Factory, Inc. | Methods and apparatus for selective spring pre-load adjustment |
| US9422018B2 (en) | 2008-11-25 | 2016-08-23 | Fox Factory, Inc. | Seat post |
| US10036443B2 (en) | 2009-03-19 | 2018-07-31 | Fox Factory, Inc. | Methods and apparatus for suspension adjustment |
| US11299233B2 (en) | 2009-01-07 | 2022-04-12 | Fox Factory, Inc. | Method and apparatus for an adjustable damper |
| US8936139B2 (en) | 2009-03-19 | 2015-01-20 | Fox Factory, Inc. | Methods and apparatus for suspension adjustment |
| GB2471727A (en) * | 2009-07-11 | 2011-01-12 | I Mob Plc | Vehicle tracking, monitoring & information transfer device |
| WO2011023247A1 (en) | 2009-08-25 | 2011-03-03 | Tele Atlas B.V. | Generating raster image representing road existence probability based on probe measurements |
| US9140562B2 (en) * | 2011-03-24 | 2015-09-22 | Claude Mignen | System and method for transferring vehicle operating data to an external navigation system |
| EP2518445B1 (en) * | 2011-04-29 | 2019-02-27 | Harman Becker Automotive Systems GmbH | Database for a navigation device, method of outputting a three-dimensional representation of a terrain and method of generating a database |
| US9319065B2 (en) | 2012-03-15 | 2016-04-19 | Nokia Technologies Oy | Encoding and decoding of data |
| CN102662358A (zh) * | 2012-04-06 | 2012-09-12 | 杭州鸿泉数字设备有限公司 | 车载信息终端实现装置 |
| US9304520B2 (en) * | 2012-04-27 | 2016-04-05 | Hewlett-Packard Development Company, L.P. | Thermal management |
| US9031779B2 (en) * | 2012-05-30 | 2015-05-12 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and method for hazard detection and sharing |
| US9062983B2 (en) * | 2013-03-08 | 2015-06-23 | Oshkosh Defense, Llc | Terrain classification system for a vehicle |
| US9204258B2 (en) * | 2013-05-17 | 2015-12-01 | Theodore C. Chen | Device and method for disabling communication and/or other application functions on a mobile communication device |
| DE102013009082A1 (de) | 2013-05-29 | 2013-12-12 | Daimler Ag | Verfahren zum Betrieb eines Fahrzeugs |
| US9014977B2 (en) | 2013-06-21 | 2015-04-21 | Here Global B.V. | Method and apparatus for route determination based on one or more non-travel lanes |
| EP3627446B1 (en) * | 2013-12-19 | 2021-06-16 | Apple Inc. | System, method and medium for generating a geometric model |
| DE102014002113A1 (de) * | 2014-02-15 | 2015-08-20 | Audi Ag | Verfahren zum Betrieb eines Sicherheitssystems eines Kraftfahrzeugs und Kraftfahrzeug |
| CN103968850B (zh) * | 2014-05-14 | 2016-11-02 | 百度在线网络技术(北京)有限公司 | 更新兴趣点引导信息的方法及装置 |
| US9959289B2 (en) * | 2014-08-29 | 2018-05-01 | Telenav, Inc. | Navigation system with content delivery mechanism and method of operation thereof |
| US9721471B2 (en) * | 2014-12-16 | 2017-08-01 | Here Global B.V. | Learning lanes from radar data |
| US9728086B2 (en) * | 2015-05-01 | 2017-08-08 | CVIA Ltd. | System and method for providing bumper alerts |
| EP3130891B1 (en) | 2015-08-11 | 2018-01-03 | Continental Automotive GmbH | Method for updating a server database containing precision road information |
| EP3131020B1 (en) | 2015-08-11 | 2017-12-13 | Continental Automotive GmbH | System and method of a two-step object data processing by a vehicle and a server database for generating, updating and delivering a precision road property database |
| EP3159853B1 (en) * | 2015-10-23 | 2019-03-27 | Harman International Industries, Incorporated | Systems and methods for advanced driver assistance analytics |
| US9848308B2 (en) | 2016-01-06 | 2017-12-19 | Michael P. DEMELE | System and method for generating driver status and destination arrival notifications for reducing distracted driving and increasing driver safety |
| US9786171B2 (en) | 2016-01-26 | 2017-10-10 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for detecting and distributing hazard data by a vehicle |
| US10828954B2 (en) * | 2016-07-13 | 2020-11-10 | Ford Global Technologies, Llc | Ride performance optimization systems and devices, and related methods |
| DE102017216584A1 (de) * | 2017-09-19 | 2019-03-21 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Erstellen einer Karte |
| US10816345B2 (en) * | 2018-06-22 | 2020-10-27 | Qualcomm Incorporated | Enhancing navigation experience using V2X supplemental information |
| US10928522B2 (en) * | 2018-12-18 | 2021-02-23 | Continental Teves Ag & Co. Ohg | Method and device for determining navigation information |
| JP2020160943A (ja) * | 2019-03-27 | 2020-10-01 | いすゞ自動車株式会社 | 検出装置及び検出方法 |
| GB201909556D0 (en) * | 2019-07-03 | 2019-08-14 | Tomtom Traffic Bv | Collecting user-contributed data relating to a navibable network |
| CN110779535B (zh) * | 2019-11-04 | 2023-03-03 | 腾讯科技(深圳)有限公司 | 一种获得地图数据及地图的方法、装置和存储介质 |
Family Cites Families (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2695414B2 (ja) * | 1987-07-10 | 1997-12-24 | アイシン・エィ・ダブリュ株式会社 | 車両用ナビゲーション装置 |
| DE3851604T3 (de) * | 1987-10-30 | 1999-01-21 | Aisin Aw Co | Navigationseinrichtung, die auf einem System zur Berechnung der gegenwärtigen Position beruht. |
| JP2659742B2 (ja) * | 1988-03-02 | 1997-09-30 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置 |
| DE69219006T2 (de) * | 1991-05-21 | 1997-11-13 | Matsushita Electric Ind Co Ltd | Fahrzeugpositionsbestimmungsvorrichtung |
| EP0580166B1 (en) * | 1992-07-23 | 1999-06-16 | Aisin Aw Co., Ltd. | Vehicle navigation system |
| JP3227272B2 (ja) * | 1993-05-28 | 2001-11-12 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置 |
| US5557522A (en) * | 1993-09-10 | 1996-09-17 | Nissan Motor Co., Ltd. | Apparatus and method for guiding vehicle occupant to travel from present position of vehicle to set destination through display unit |
| EP0699894B1 (en) * | 1994-09-01 | 2002-03-27 | Aisin Aw Co., Ltd. | Navigation system |
| DE19521929A1 (de) * | 1994-10-07 | 1996-04-11 | Mannesmann Ag | Einrichtung zur Zielführung von Personen |
| US5842147A (en) * | 1995-03-06 | 1998-11-24 | Aisin Aw Co., Ltd. | Navigation display device which indicates goal and route direction information |
| US6732077B1 (en) * | 1995-05-12 | 2004-05-04 | Trimble Navigation Limited | Speech recognizing GIS/GPS/AVL system |
| US6405132B1 (en) * | 1997-10-22 | 2002-06-11 | Intelligent Technologies International, Inc. | Accident avoidance system |
| US7672756B2 (en) * | 1995-06-07 | 2010-03-02 | Automotive Technologies International, Inc. | Vehicle communications using the internet |
| US6526352B1 (en) * | 2001-07-19 | 2003-02-25 | Intelligent Technologies International, Inc. | Method and arrangement for mapping a road |
| US6370475B1 (en) * | 1997-10-22 | 2002-04-09 | Intelligent Technologies International Inc. | Accident avoidance system |
| US5911773A (en) * | 1995-07-24 | 1999-06-15 | Aisin Aw Co., Ltd. | Navigation system for vehicles |
| DE69631458T2 (de) * | 1995-10-04 | 2004-07-22 | Aisin AW Co., Ltd., Anjo | Fahrzeugnavigationssystem |
| KR960042490A (ko) * | 1995-11-09 | 1996-12-21 | 모리 하루오 | 차량용 네비게이션(navigation) 장치 및 그를 위한 기록매체 |
| US5910882A (en) * | 1995-11-14 | 1999-06-08 | Garmin Corporation | Portable electronic device for use in combination portable and fixed mount applications |
| KR100269069B1 (ko) * | 1996-08-30 | 2000-10-16 | 모리 하루오 | 차량용네비게이션장치및기억매체 |
| KR100269070B1 (ko) * | 1996-08-30 | 2000-10-16 | 모리 하루오 | 차량용네비게이션장치 |
| US6381533B1 (en) * | 1997-10-16 | 2002-04-30 | Navigation Technologies Corp. | Method and system using positions of cellular phones matched to road network for collecting data |
| US6047234A (en) * | 1997-10-16 | 2000-04-04 | Navigation Technologies Corporation | System and method for updating, enhancing or refining a geographic database using feedback |
| JP3045713B1 (ja) * | 1998-12-09 | 2000-05-29 | 富士通株式会社 | 車載型車両誘導装置及び通信サーバシステム並びに代替車両誘導システム |
| US6208934B1 (en) * | 1999-01-19 | 2001-03-27 | Navigation Technologies Corp. | Method and system for providing walking instructions with route guidance in a navigation program |
| JP3896728B2 (ja) * | 1999-06-23 | 2007-03-22 | トヨタ自動車株式会社 | 携帯型端末装置及び車載情報処理装置 |
| JP2001221643A (ja) * | 2000-02-04 | 2001-08-17 | Pioneer Electronic Corp | カーナビゲーションシステムからの地図情報切り出し装置 |
| JP2001289654A (ja) * | 2000-04-11 | 2001-10-19 | Equos Research Co Ltd | ナビゲーション装置、ナビゲーション装置の制御方法、及びそのプログラムを記録した記録媒体 |
| JP2001328451A (ja) * | 2000-05-18 | 2001-11-27 | Denso Corp | 進行路推定装置、先行車認識装置、及び記録媒体 |
| US6873998B1 (en) * | 2000-10-18 | 2005-03-29 | Navteq North America, Llc | System and method for updating a geographic database using satellite imagery |
| JP3598986B2 (ja) * | 2001-03-22 | 2004-12-08 | 日産自動車株式会社 | 地図情報提供装置及び地図情報提供方法 |
| US6545637B1 (en) * | 2001-12-20 | 2003-04-08 | Garmin, Ltd. | Systems and methods for a navigational device with improved route calculation capabilities |
| US6970786B2 (en) * | 2001-12-25 | 2005-11-29 | Aisin Aw Co., Ltd. | Method for transmitting map data and map display apparatus and system |
| US20040249534A1 (en) * | 2002-04-12 | 2004-12-09 | Kunihiro Yamada | Power supply management system for vehicle mounted apparatus |
| US6681176B2 (en) * | 2002-05-02 | 2004-01-20 | Robert Bosch Gmbh | Method and device for a detachable navigation system |
| CN100432627C (zh) * | 2002-06-21 | 2008-11-12 | 爱信艾达株式会社 | 导航系统、利用者终端以及导航装置 |
| JP3997917B2 (ja) * | 2003-01-10 | 2007-10-24 | 株式会社デンソー | 地図検索装置 |
| US7421334B2 (en) * | 2003-04-07 | 2008-09-02 | Zoom Information Systems | Centralized facility and intelligent on-board vehicle platform for collecting, analyzing and distributing information relating to transportation infrastructure and conditions |
| US7188026B2 (en) * | 2003-05-12 | 2007-03-06 | Dash Navigation, Inc. | Hierarchical floating car data network |
| US6850841B1 (en) * | 2003-05-15 | 2005-02-01 | Navtech North American, Llc | Method and system for obtaining lane data |
| JP3969356B2 (ja) * | 2003-06-24 | 2007-09-05 | アイシン・エィ・ダブリュ株式会社 | ナビゲーションシステム及び地点検索方法のプログラム |
| JP3956910B2 (ja) * | 2003-07-10 | 2007-08-08 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置及びそれを備えたナビゲーションシステム |
| US7079946B2 (en) * | 2003-08-29 | 2006-07-18 | Denso Corporation | Iterative logical renewal of navigable map database |
| JP4392747B2 (ja) * | 2003-12-24 | 2010-01-06 | アイシン・エィ・ダブリュ株式会社 | ナビゲーションシステム |
| JP4576844B2 (ja) * | 2004-01-30 | 2010-11-10 | アイシン・エィ・ダブリュ株式会社 | 道路形状推測装置 |
| JP2006189325A (ja) * | 2005-01-06 | 2006-07-20 | Aisin Aw Co Ltd | 車両の現在地情報管理装置 |
| US7606660B2 (en) * | 2005-12-31 | 2009-10-20 | Alpine Electronics, Inc. | In-vehicle navigation system with removable navigation unit |
-
2008
- 2008-10-08 JP JP2011530371A patent/JP2012505449A/ja not_active Withdrawn
- 2008-10-08 EP EP08875164A patent/EP2344843A1/en not_active Withdrawn
- 2008-10-08 WO PCT/EP2008/063484 patent/WO2010040404A1/en active Application Filing
- 2008-10-08 CN CN2008801293125A patent/CN102037317A/zh active Pending
- 2008-10-08 AU AU2008362588A patent/AU2008362588A1/en not_active Abandoned
- 2008-10-08 CA CA2725780A patent/CA2725780A1/en not_active Abandoned
- 2008-10-08 BR BRPI0822748-9A patent/BRPI0822748A2/pt not_active IP Right Cessation
- 2008-10-08 KR KR1020117007951A patent/KR20110063823A/ko not_active Application Discontinuation
- 2008-10-08 US US12/736,894 patent/US20110224901A1/en not_active Abandoned
- 2008-10-24 TW TW097141087A patent/TW201017126A/zh unknown
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013525771A (ja) * | 2010-04-21 | 2013-06-20 | トムトム インターナショナル ベスローテン フエンノートシャップ | 電子地図にわたり経路を生成するシステム及び方法 |
| US9506764B2 (en) | 2010-04-21 | 2016-11-29 | Tomtom Navigation B.V. | System and method of generating a route across an electronic map |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2008362588A1 (en) | 2010-04-15 |
| CN102037317A (zh) | 2011-04-27 |
| BRPI0822748A2 (pt) | 2015-06-23 |
| EP2344843A1 (en) | 2011-07-20 |
| TW201017126A (en) | 2010-05-01 |
| CA2725780A1 (en) | 2010-04-15 |
| KR20110063823A (ko) | 2011-06-14 |
| US20110224901A1 (en) | 2011-09-15 |
| WO2010040404A1 (en) | 2010-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012505449A (ja) | 車両搭載型のナビゲーション装置に関する改善 | |
| JP6203331B2 (ja) | 駐車情報を判定する装置及び方法 | |
| JP5746976B2 (ja) | デジタル地図に対する補足情報を生成する装置及び方法、コンピュータプログラム、マシン可読情報媒体 | |
| WO2010040403A1 (en) | Improvements relating to navigation apparatus used in-vehicle | |
| JP6211927B2 (ja) | ポータブル処理装置、サーバ、これらにおける運転の提案を提供する方法、データ記録媒体 | |
| JP5281165B2 (ja) | ナビゲーション装置、サーバ、ナビゲーションシステム、及び、予め決められた事象を監視する方法 | |
| JP2013510300A (ja) | ナビゲーション装置及び方法 | |
| WO2010040385A1 (en) | Navigation apparatus and method for use therein | |
| WO2010040386A1 (en) | Navigation apparatus and method of determining a route therefor | |
| WO2009143903A1 (en) | Navigation apparatus and method that adapt to driver' s workload | |
| US20140046584A1 (en) | Non-uniform weighting factor as route algorithm input | |
| WO2010075874A1 (en) | Vehicle air circulation control | |
| WO2010040387A1 (en) | Navigation apparatus and method for providing instructions | |
| WO2010040401A1 (en) | A system and method for determining road attributes | |
| WO2010075875A1 (en) | Personal navigation device | |
| WO2010040382A1 (en) | Navigation apparatus and method for use therein | |
| WO2010012295A1 (en) | Navigation apparatus and method and computer software for use in the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A072 | Dismissal of procedure [no reply to invitation to correct request for examination] |
Free format text: JAPANESE INTERMEDIATE CODE: A073 Effective date: 20130111 |
|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20130205 |