JP2012250083A - 超音波診断装置および超音波診断装置のデータ処理プログラム - Google Patents
超音波診断装置および超音波診断装置のデータ処理プログラム Download PDFInfo
- Publication number
- JP2012250083A JP2012250083A JP2012209386A JP2012209386A JP2012250083A JP 2012250083 A JP2012250083 A JP 2012250083A JP 2012209386 A JP2012209386 A JP 2012209386A JP 2012209386 A JP2012209386 A JP 2012209386A JP 2012250083 A JP2012250083 A JP 2012250083A
- Authority
- JP
- Japan
- Prior art keywords
- blood flow
- flow rate
- instantaneous
- ultrasonic diagnostic
- graph
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
- A61B8/065—Measuring blood flow to determine blood output from the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
- A61B5/318—Heart-related electrical modalities, e.g. electrocardiography [ECG]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
- A61B5/318—Heart-related electrical modalities, e.g. electrocardiography [ECG]
- A61B5/33—Heart-related electrical modalities, e.g. electrocardiography [ECG] specially adapted for cooperation with other devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/467—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient characterised by special input means
- A61B8/469—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient characterised by special input means for selection of a region of interest
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Cardiology (AREA)
- Gynecology & Obstetrics (AREA)
- Hematology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
【課題】より適切な部位において血流の流量を計測することが可能な超音波診断装置および超音波診断装置のデータ処理プログラムを提供することである。
【解決手段】超音波診断装置は、プローブを動かしながら行われる超音波の3次元走査によって被検体から3次元のドプラ速度情報を取得するドプラ速度情報取得手段と、前記3次元のドプラ速度情報を用いて、前記被検体に対する前記プローブの位置又は角度における血流の瞬時流量を求める瞬時流量算出手段と、前記血流の瞬時流量から血流の流量の時間変化を示すグラフ情報を作成し、前記グラフ情報をリアルタイムで表示するグラフ表示手段と、を有することを特徴とする。
【選択図】 図12
【解決手段】超音波診断装置は、プローブを動かしながら行われる超音波の3次元走査によって被検体から3次元のドプラ速度情報を取得するドプラ速度情報取得手段と、前記3次元のドプラ速度情報を用いて、前記被検体に対する前記プローブの位置又は角度における血流の瞬時流量を求める瞬時流量算出手段と、前記血流の瞬時流量から血流の流量の時間変化を示すグラフ情報を作成し、前記グラフ情報をリアルタイムで表示するグラフ表示手段と、を有することを特徴とする。
【選択図】 図12
Description
本発明は、被検体からのドプラ信号を取得して3次元血流情報を得る超音波診断装置および超音波診断装置のデータ処理プログラムに係り、特に、血流の流速情報を積算して得られる血流の流量の時間変化を表示させる超音波診断装置および超音波診断装置のデータ処理プログラムに関する。
超音波診断装置は、被検体内に超音波を送受信することによって、被検体内の組織の断層像を無侵襲に得る画像診断装置である。超音波診断法のうち、超音波のドプラ効果を利用して被検体内の血流や組織の速度を計測する手法は超音波ドプラ法と呼ばれる。さらに、超音波パルスを用いた超音波ドプラ法は、パルスドプラ法(PWD: pulsed wave Doppler method)として知られている。
従来、PWDによって血流の流速から流量が求められている。一般的な血流の流量の計測手法では、PWDによる2次元走査によって血流の流速が求められる。
図21は、従来の2次元走査によって計測された血流速度の時間変化を示す図である。
図21において横軸は時間を示し、縦軸は血流の流速を示す。図21に示すように血流の流速は、周期的に変化し、一定の間隔でピークとなる。そして、血流速度のピーク値Vpから血流の流量が求められる。
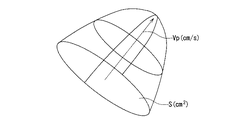
図22は、従来の2次元走査によって計測された血流速度を用いて血流の流量を求める一般的な方法を説明する模式図である。
図22に示すように、ある瞬間の血流の速度分布が線対称の楕円放物面状であると仮定する。そうすると、楕円放物面状の速度分布の中心軸にあたる血流速度のピーク値Vpを用いて式(1)に示すように2次元的な血流の瞬時流量を求めることができる。
[数1]
V2D=Vp×S (1)
但し、式(1)において、
V2D:血流の2次元瞬時流量(cm3/s)
Vp:中心軸上における血流速度のピーク値(cm/s)
S:血流断面積(cm2)
さらに、近年では、血流の流量計測を高精度かつ簡便に行うことができる3次元超音波診断装置が考案されている(例えば特許文献1参照)。この3次元超音波診断装置では、3次元走査によって得られたカラードプラ血流速度情報から血流量が計算される。3次元の血流速度情報から血流量を求める方法では、2次元断層像から補間等の処理を伴って体積を推定する方法に比べて高精度で安定した結果を得ることができる。そして、このように求められた血流の流量値がモニタに数値表示される。
V2D=Vp×S (1)
但し、式(1)において、
V2D:血流の2次元瞬時流量(cm3/s)
Vp:中心軸上における血流速度のピーク値(cm/s)
S:血流断面積(cm2)
さらに、近年では、血流の流量計測を高精度かつ簡便に行うことができる3次元超音波診断装置が考案されている(例えば特許文献1参照)。この3次元超音波診断装置では、3次元走査によって得られたカラードプラ血流速度情報から血流量が計算される。3次元の血流速度情報から血流量を求める方法では、2次元断層像から補間等の処理を伴って体積を推定する方法に比べて高精度で安定した結果を得ることができる。そして、このように求められた血流の流量値がモニタに数値表示される。
また、3次元走査により得られるカラードプラ速度情報の積算を自動的に行って心拍出量を計測する技術も考案されている。
しかしながら、従来の超音波診断装置による3次元のカラードプラ法では、得られる血流の速度情報のうち、超音波の進行方向である音軸方向の成分のみが検出される。このため、血流が流れる方向と超音波の音軸とのなす角度が90度付近になると、血流速度の検出精度が極端に低下するという問題がある。この結果、血流速度が誤認識される恐れがある。
従って、たとえ3次元の血流の速度情報から血流の流量を高精度で求める方法を採用したとしても、走査の方法、つまり血流が流れる方向と超音波の音軸との相対的な傾斜によっては、正確に血流の流量を求めることが困難な場合があるという問題がある。
この問題を解決するためには、血流の向きと超音波の音軸との相対角度ができるだけ小さな角度になるように走査することが必要になる。しかしながら、超音波診断は、被検体の限られた位置からしか走査することができない。例えば、骨や肺は超音波を通過させないので避けて走査しなければならない。
これに対し、血流の流れ方向と超音波の音軸との間の角度が大きい状態で、可能な限り血流速度の計測精度を向上させる方法として、走査する位置を動かしながら、検出される血流の流速や血流の流速から演算して得られる流量の絶対値が最大になるような位置を探るという方法が知られている。
従来の3次元走査によって得られる血流の流量を数値表示させた状態で、最大の血流の流量が得られる走査位置を見つけようとする場合には、走査位置を変化させて血流の流量の数値表示を最大にするという作業が必要になる。このため、操作者は超音波画像と数値表示された血流の流量を同時に注視することとなる。加えて、操作者は、血流の流量の最大値が得られた走査位置を記憶しなければならない。そして、このような負担が発生することから現実的には、容易に血流の最大流速や最大流量を捕らえることが困難な状況にある。
また、心拍出量についてみても、超音波の走査位置に依存して変化する。これは、上述したように超音波ドプラ法に特有の走査角度依存性によるものである。従って、ある走査位置の血流の流量を時間方向に積分することによって心拍出量を計測した場合に、適切な精度で心拍出量が計測されたか否かを判断することが困難である。
本発明はかかる従来の事情に対処するためになされたものであり、より適切な部位において血流の流量を計測することが可能な超音波診断装置および超音波診断装置のデータ処理プログラムを提供することを目的とする。
実施形態の超音波診断装置は、プローブを動かしながら行われる超音波の3次元走査によって被検体から3次元のドプラ速度情報を取得するドプラ速度情報取得手段と、前記3次元のドプラ速度情報を用いて、前記被検体に対する前記プローブの位置又は角度における血流の瞬時流量を求める瞬時流量算出手段と、前記血流の瞬時流量から血流の流量の時間変化を示すグラフ情報を作成し、前記グラフ情報をリアルタイムで表示するグラフ表示手段と、を有することを特徴とする。
本発明に係る超音波診断装置および超音波診断装置のデータ処理プログラムの実施の形態について添付図面を参照して説明する。
図1は本発明に係る超音波診断装置の実施の形態を示す機能ブロック図である。
超音波診断装置1は、送信回路2、2次元(2D: two-dimensional)アレイプローブ(2Dアレイ探触子)3、受信回路4、カラードプラ演算部5、3次元デジタルスキャンコンバータ(3D-DSC: three-dimensional-digital scan converter)座標変換部6、関心領域(ROI: region of interest)入力部7、流量演算部8、流量−時間グラフ処理部9、心拍出量演算部10、入力装置11および表示部12を備えている。各構成要素は、回路により、またはコンピュータにプログラムを読み込ませて構築することができる。
送信回路2は、2Dアレイプローブ3から所望の方向に所望の送信タイミングおよび送信間隔で超音波が送信されるように送信信号としてパルス信号を生成し、生成した送信信号を2Dアレイプローブ3に印加する機能を有する。
2Dアレイプローブ3は、超音波を送受信するための複数の超音波振動子を備えている。各超音波振動子は、2次元に配列される。そして2Dアレイプローブ3は、各超音波振動子を用いた遅延時間の制御による電子走査によって3次元走査を行うことができるように構成されている。そして、2Dアレイプローブ3は、送信回路2から電気信号として与えられた送信信号を超音波として被検体内に送信する一方、被検体内において生じた超音波エコーを受信して電気信号としてのエコー信号に変換し、受信回路4に与えるように構成される。特に超音波断層像であるBモード画像用のエコー信号の他、超音波ドプラ法による血流像を生成するための3次元のドプラ信号が2Dアレイプローブ3により受信され、受信されたドプラ信号は受信回路4に出力される。
受信回路4は、2Dアレイプローブ3からドプラ信号およびBモード画像用のエコー信号を取得してBモード画像用のエコー信号を図示しないBモード画像処理系に与える一方、ドプラ信号をカラードプラ演算部5に与える機能を有する。
カラードプラ演算部5は、受信回路4から取得したドプラ信号から血流の3次元的な速度情報であるカラードプラ速度情報を求める機能と、求めたカラードプラ速度情報を3D-DSC座標変換部6に与える機能とを有する。
3D-DSC座標変換部6は、カラードプラ演算部5から取得したカラードプラ速度情報の走査方式を2Dアレイプローブ3による走査方式からテレビ走査の方式に変換するための座標変換処理を行う機能と、座標変換後のカラードプラ速度情報を表示部12および流量演算部8に与える機能とを有する。また、3D-DSC座標変換部6には、フリーズや補間処理等の必要な画像処理機能が備えられる。
すなわち、3D-DSC座標変換部6から表示部12にテレビ走査方式にカラードプラ速度情報が出力されることによって、表示部12には、カラードプラ像が表示される。また、図示しないBモード画像処理系において生成されたBモード画像情報が表示部12に与えられる場合には、表示部12においてBモード画像上にカラードプラ像を重畳表示させることができる。
ROI入力部7は、入力装置11からの指示情報に従ってROIを設定する機能と、設定したROIを流量演算部8に与える機能とを有する。ROIは、任意の平面上または曲面上における2次元の領域として空間的に設定することができる。
流量演算部8は、3D-DSC座標変換部6から取得した3次元のカラードプラ速度情報に基づいてROI入力部7から取得したROI内における血流の瞬時流量を計算する機能と、計算により得られた血流の瞬時流量を流量−時間グラフ処理部9に与える機能とを有する。また、流量演算部8は、ROI内における血流の瞬時流量を計算するためのカラードプラ速度情報が不足する場合には、取得した他のカラードプラ速度情報から不足するカラードプラ速度情報を補間により求めることができるように構成される。
流量−時間グラフ処理部9は、流量演算部8から取得したROI内における各時刻の血流の瞬時流量値から血流の流量の時間変化を示すグラフを表示部12に表示させるためのグラフ情報を作成する機能と、作成したグラフ情報を表示部12に与えることによりグラフを表示させる機能とを有する。また、流量−時間グラフ処理部9は、作成したグラフ情報を心拍出量演算部10に与えるように構成される。
また、流量−時間グラフ処理部9には、生体信号取得部9aを設けることができる。生体信号取得部9aは、被検体から所望の生体信号の時間変化を示す信号を取得する機能を有する。生体信号取得部9aは、例えば、被検体からのECG(electro cardiogram)信号を取得するECG信号取得部で構成することができる。
そして、ECG信号等の生体信号が取得される場合には、血流の流量の時間変化と時相を同期させて生体信号の時間変化がグラフに並列表示されるように流量−時間グラフ処理部9がグラフ情報を作成するように構成される。
心拍出量演算部10は、流量−時間グラフ処理部9から取得したグラフ情報に基づいて心臓における1心拍分の拍出量、すなわち心拍出量を求める機能と、求めた心拍出量を表示部12に与えて表示させる機能とを有する。
次に超音波診断装置1の動作および作用について説明する。
図2は、図1に示す超音波診断装置1により超音波画像とともに血流量の時間変化を取得して表示させる手順を示すフローチャートであり、図中Sに数字を付した符号はフローチャートの各ステップを示す。
まずステップS1において、3次元走査により被検体からのドプラ信号が収集される。すなわち、送信回路2は、送信信号としてパルス信号を生成し、生成した送信信号を2Dアレイプローブ3に印加する。そうすると、2Dアレイプローブ3は、電気信号である送信信号を超音波に変換し、走査線に沿って被検体内の所定の深さの位置に送信する。そして、被検体内において生じたドプラ信号が2Dアレイプローブ3により受信され、受信されたドプラ信号は電気信号に変換されて受信回路4に出力される。受信回路4は、2Dアレイプローブ3から受けたドプラ信号をカラードプラ演算部5に与える。
このようなドプラ信号の収集は、3次元走査によって3次元的に行われる。3次元走査で得られる超音波画像用のデータの1単位は、Volumeと呼ばれる。1つのVolumeを得るためには2Dアレイプローブ3を血流像の生成対象となる部位へ向けて同一走査線上において必要な回数だけ超音波信号の送受信が行われ、複数回に亘って走査が行われる。そして、カラードプラ演算部5には被検体内の3次元空間の各位置からの複数のドプラ信号が蓄積される。
次にステップS2において、カラードプラ演算部5において、収集されたドプラ信号から3次元のカラードプラ速度情報が求められる。カラードプラ速度情報は3次元空間の各位置においてある空間的な大きさの単位を持ち、カラードプラ速度情報の各位置において単位となる大きさはピクセル(画素)と呼ばれる。一般的には血流像の表示用に求められるピクセルは全て均一な大きさとして扱われる。
図3は、図1に示すカラードプラ演算部5において求められる3次元カラードプラ速度情報の一例を示す模式図である。
図3に示すようにある断面A上の各位置には、同一サイズの複数のピクセルが形成される。そしてカラードプラ演算部5では、同一走査線上の複数のドプラ信号からピクセルごとに大きさと向きを持った3次元のカラードプラ速度情報が求められる。そして、求められたピクセルごとのカラードプラ速度情報は、3次元空間の対応する位置に配置される。
次に、カラードプラ演算部5において求められた3次元のカラードプラ速度情報は、3D-DSC座標変換部6に与えられる。3D-DSC座標変換部6では、カラードプラ演算部5から取得したカラードプラ速度情報の走査方式が2Dアレイプローブ3による走査方式からテレビ走査の方式に変換される。これにより血流像を表示部12に表示させるための血流像データとして座標変換後のカラードプラ速度情報が生成される。また、3D-DSC座標変換部6では、フリーズや補間処理等の必要な画像処理が施される。
3D-DSC座標変換部6において生成された座標変換後のカラードプラ速度情報は、流量演算部8および表示部12に与えられる。これにより、表示部12には、カラードプラ像が表示される。また、図示しないBモード画像処理系において生成されたBモード画像情報が表示部12に与えられる場合には、表示部12においてBモード画像上にカラードプラ像を重畳表示させることができる。
カラードプラ像は、前述のように1Volume分のドプラ信号から生成される。1Volumeのカラードプラ像の構成を完了させるために必要な時間は、超音波の被検体内における伝播速度、超音波信号の送信時間の間隔、1Volume分の3次元のドプラ信号を収集するための走査線の本数(超音波の送信回数)等の条件により決定される。これらの条件によって定まる1秒間に構成可能なVolume数はVolumeレートと呼ばれる。Volumeレートの単位は、Volume/秒である。
そしてカラードプラ像のVolumeごとの構成が繰返し行われることにより、時間的に連続した画像が作成される。そして、作成された画像が順次表示部12に表示されることにより、いわゆる画像のリアルタイム表示が実現される。
次に、ステップS3において、入力装置11の操作によって指示情報がROI入力部7に入力され、ROI入力部7において血流量を求めるための所望の領域がROIとして設定される。このとき表示部12には、ROIを設定するための画面が表示される。ROIを設定するための画面情報は、ROI入力部7において作成することができる。そして、GUI(Graphical User Interface)技術により表示部12に表示された画面を参照しつつマウス等の入力装置11の操作によってROIを容易に設定することができる。
ROIを設定するための画面には、例えばvolume rendering画像、surface rendering画像や単一又は複数の断面変換(MPR: multi-planar reconstruction)画像等の3次元画像を表示させることができる。このROI設定用の3次元画像は、3次元走査で得られる超音波画像用のvolumeデータから作成することができる。
そして、例えば、マウス等の入力装置11の操作によって3次元画像上の任意の位置に点を指定するとともに半径を入力することにより、指定された点を中心とする円内の2次元領域をROIとして設定することができる。但し、2次元領域は円に限らず任意の形状とすることができる。2次元領域を作成するための3次元空間内の平面或いは曲面は入力装置11の操作によって任意に決定することができる。
さらに、入力装置11の操作によって一旦作成したROIを任意の倍率で拡大あるいは縮小することが可能であり、任意方向へのROIの並行移動や任意に選択された軸を中心とするROIの回転移動を行うことができる。また、ROIは、1つのみならず、複数設定することもできる。また、データ収集が行われる全範囲をROIとして設定することもできる。
そして、ROI入力部7は、最終的に設定されたROIを流量演算部8に与える。
次に、ステップS4において、流量演算部8により、設定されたROI内におけるカラードプラ速度情報から血流の瞬時流量が求められる。すなわち、流量演算部8は、3次元走査によって得られたカラードプラ速度情報を1Volumeごとに積分(加算)し、積分(加算)の結果にカラーピクセルの大きさを乗算する。これにより、3次元の血流の瞬時流量が得られる。図3に示す断面A上における3次元カラードプラ速度情報から血流の瞬時流量を求める場合には、式(2)に示す演算が流量演算部8において行われる。

但し、式(2)において、
V3D:断面Aを通過する血流の3次元瞬時流量(cm3/s)
Vp:ピクセル上におけるカラードプラ速度情報(cm/s)
Sp:ピクセルのサイズ(cm2)
である。
V3D:断面Aを通過する血流の3次元瞬時流量(cm3/s)
Vp:ピクセル上におけるカラードプラ速度情報(cm/s)
Sp:ピクセルのサイズ(cm2)
である。
このように3次元走査により得られたカラードプラ速度情報から血流の瞬時流量を求めれば、2次元走査により得られたカラードプラ速度情報から血流の瞬時流量を求める場合に比べて、高い精度で血流の瞬時流量を求めることができる。その理由は、次に述べる通りである。
一般的な被検体内の血流は、血管が様々な方向に走行することからその速度分布が複雑となる。このため、式(1)のような2次元走査により得られたカラードプラ速度情報を用いた単純な計算では、正確な血流の流量を算出することが困難である。つまり、通常の血流の速度分布は図22に示すように中心線の周囲に回転対称な分布とはならない。このため、2次元走査による血流の流量測定には精度上の限界がある。
これに対し、3次元走査による血流の流量測定では、血管が様々な方向に走行していても、より適切に複雑な血流の速度分布を3次元的に求めることが可能である。このため、3次元走査による血流の流量測定は、精度上2次元走査による血流の流量測定に比べて有利である。
3次元カラードプラ速度情報から求められる血流の瞬時流量は、1Volumeごとに算出される。従って、連続するVolumeに対してそれぞれ3次元カラードプラ速度情報から血流の瞬時流量が順次算出される。
ここで、ROIが設定された断面と異なる複数の断面上のカラードプラ速度情報から血流の瞬時流量を算出することもできる。
図4は、図1に示す超音波診断装置1により3次元の走査対象となる複数の断面の例を示す図であり、図5は、図4に示す複数の断面を上方から見た図である。
図4に示すように、例えばROIが設定される断面と垂直な方向の複数の断面Sscanを走査対象とすることができる。このような場合、走査対象となる断面Sscan間においてカラードプラ速度情報のデータが不足する領域が発生する恐れがある。そこで、血流の瞬時流量の算出のためにカラードプラ速度情報が不足する場合には、流量演算部8により不足するカラードプラ速度情報が他の取得可能なカラードプラ速度情報から補間によって推定される。
カラードプラ速度情報を補間によって推定する場合には、推定精度を確保するために走査対象となる断面Sscan間における空間Rを十分に小さくすることが必要となる。そこで、流量演算部8にカラードプラ速度情報の補間精度を十分に得るために必要な走査断面Sscanを求める機能を設けてもよい。そして、流量演算部8により求められた走査断面Sscanを送信回路2に与えて超音波の送信条件を制御できるようにすることもできる。
また、流量演算部8に走査断面Sscanを求める機能を設けない場合には、十分な補間精度でカラードプラ速度情報が得られるように操作者により予め超音波の送受信による走査対象となる断面Sscanが設定される。
図6は、図1に示す超音波診断装置1によりROIに合わせて走査対象となる複数の断面間の空間の大きさを設定した例を示す図であり、図7は、図6に示す複数の断面を上方から見た図である。
図6に示すようにROIが設定された領域において、局所的に走査対象となる複数の断面Sscan間の距離が小さくなるように走査断面Sscanを設定すれば、走査線数の増加を抑制しつつ、カラードプラ速度情報の補間精度を確保することができる。
そして、このように必要に応じて補間処理を伴って求められた1Volumeごとの血流の瞬時流量は、流量演算部8から流量−時間グラフ処理部9に与えられる。
次に、ステップS5において、流量−時間グラフ処理部9は、流量演算部8から取得したROI内における血流の瞬時流量値から血流の流量の時間変化を示すグラフ情報を作成する。すなわち、流量−時間グラフ処理部9は、流量演算部8から順次取得した1Volumeごとの血流の瞬時流量の時間変化をプロットする。これにより血流の瞬時流量と時間を軸とするグラフを作成することができる。そして、流量−時間グラフ処理部9は、作成したグラフ情報を表示部12に与えることによりグラフを表示させる。
グラフ上の流量値は、3次元カラードプラ速度情報から血流の瞬時流量が算出される都度得られる。すなわち、カラードプラ像と同様に1Volumeごとに血流の流量を求めることができる。従って、1Volumeごとに継続的に血流の流量の時間変化グラフを更新することが可能である。このため、表示部12に1Volumeごとに更新しつつ血流の流量の時間変化グラフを表示させれば、カラードプラ像と同様にグラフのリアルタイム表示を行うことができる。
グラフは、任意の方式で表示部12に表示および更新させることができる。
図8は、図1に示す表示部12に血流の流量の時間変化グラフをムービングバー方式で表示させる場合の例を示す図である。
図8の(a),(b)において、横軸は時間を示し、縦軸は血流の流量を示す。図8(a),(b)に示すように、血流の流量の時間変化は、例えば時間方向に移動するムービングバー(移動カーソル)Bを用いて表示することができる。すなわち、図8(a)に示すようにムービングバーBで示されるある時刻以前の血流の流量の時間変化が表示される。そして、時間が経過すると、図8(b)に示すようにムービングバーBが時間方向に移動し、血流の流量の時間変化が順次追加表示される。
すなわち、ムービングバー方式は、画像更新の位置を移動カーソルで示すものである。ムービングバー方式によるグラフの表示方法は、超音波診断装置1において一般的に利用されている表示方法であり、Mモード像やパルスドプラモードにより得られる画像の表示にもしばしば用いられている。このため、操作者の読影に適していると言える。
図9は、図1に示す表示部12に血流の流量の時間変化グラフをスクロール方式で表示させる場合の例を示す図である。
図9の(a),(b)において、横軸は時間を示し、縦軸は血流の流量を示す。図9(a),(b)に示すように、血流の流量の時間変化は、例えば血流の流量変化を示す波形Wを時間とともに移動させるスクロール方式により表示させることもできる。すなわち、図9(a)に示すようにある時刻以前における血流の流量の時間変化が表示部12に表示される。そして、時間が経過すると、図9(b)に示すように血流の流量変化を示す波形Wが左側(過去方向)に向かって移動し、時間の経過後の時刻以前における血流の流量の時間変化が表示部12に表示される。すなわち、スクロール方式では、最新の血流の流量が常に左端に固定表示される。
また、複数のROIが設定されている場合には、ROIごとに血流の流量の時間変化がグラフとして表示部12に表示される。
図10は、図1に示すROI入力部7において複数のROIを設定した例を示す図であり、図11は、図10に示す各ROI内における血流の流量の時間変化をそれぞれグラフ表示させた例を示す図である。
図10に示すように走査範囲内の血流が存在する領域R1, R2の一部が含まれるように、例えば2箇所の断面をROI 1, ROI 2としてそれぞれ設定することができる。
そして、図11に示すように、図10に示すROI 1, ROI 2におけるそれぞれ血流の流量の時間変化グラフをECG波形と時間的に同期して並列表示させることができる。すなわち、図11において横軸は時間を示す。また図11の上段における縦軸は、ROI 1における血流の流量を、中段における縦軸は、ROI 2における血流の流量を、下段における縦軸は、ECG波形の値をそれぞれ示す。
このように、3次元走査により得られるカラードプラ速度情報のうち、ある限られた空間内の速度情報のみを利用して血流の瞬時流速を求めることが診断に有用である。このため、ROIを操作者の指定により設定できるようにすることで、操作者の利便性を向上させることができる。
また、ここまでは、2Dアレイプローブ3を固定した場合における血流の流量の時間変化グラフの例を示したが、前述したように、血流の流れ方向と超音波の音軸との間の角度が大きい場合には、血流速度の計測精度を向上させるために2Dアレイプローブ3により走査する位置を動かしながら、最大の血流の流量が得られる走査位置を見つけることが必要となる。2Dアレイプローブ3を動かしながら走査を行った場合には、血流の瞬時流量が同様な振幅の波形の繰返しとならずに、振幅が大きく変化することとなる。
図12は、図1に示す2Dアレイプローブ3を動かしながら走査を行った場合に得られる血流の流量の時間変化グラフの例を示す図である。
図12において、横軸は時間を示し、縦軸は血流の流量を示す。図12に示すように2Dアレイプローブ3を動かしながら走査を行うと、血流の流れ方向と超音波の音軸との間の角度が変化するため、血流の流量が変化する。そして、操作者は、血流の流量が最大となる走査位置を把握する作業が必要となる。
このような作業にあたり、操作者が図12に示すような血流の流量の時間変化グラフを参照できるようにすることで、操作者は容易に血流の流量の最大値や起伏を把握することが可能となる。また、時間と走査位置との間には相関関係があるため、時間と走査位置との関係が既知であれば、走査位置ごとの血流の流量値をグラフとして間接的に記録することができる。このため、操作者は血流の流量値と走査位置との関係を走査中のみならず事後的にも把握することができる。従って、操作者は走査中に超音波画像を重点的に注視することが可能となる。また、時間と走査位置とを予め決めておけば、走査位置や走査位置に対応する血流の流量を操作者が記憶する必要がない。そして、このような操作者の負担軽減により適切な走査位置および血流の流量を取得することが期待できる。
さらに、このように作成されたグラフ情報は、流量−時間グラフ処理部9から心拍出量演算部10にも与えられる。そして、2Dアレイプローブ3が固定されている場合には、心拍出量演算部10において、心拍出量を求めることができる。
すなわち、ステップS6において、心拍出量演算部10において、血流量の時間変化を示すグラフ情報から心拍出量が求められる。心拍出量は、心臓における1心拍分の拍出量に相当する1心拍分の流量の総和であり、心機能の診断に用いられる。一般的に被検体内の血流は、心臓が拍動することで周期的に移動している。このため、ドプラ信号から得られるカラードプラ速度情報や、血流の瞬時流量は心拍に同期して周期的に変化している。
そこで、血流の瞬時流量の時間変化を利用して1心拍分の周期を求め、求めた周期の区間における血流量から心拍出量を求めることができる。
図13は、図1に示す心拍出量演算部10において血流の流量の時間変化グラフから心拍出量を算出する方法を説明する図であり、図14は、図13に示す血流の流量の時間変化グラフにおいて選択された時刻間の血流量の時間変化を示す拡大図である。
図13において横軸は時間を示し、縦軸は血流の流量を示す。図13に示すような血流の流量の時間変化グラフから、血流の流量が最低値となる時刻または血流の流量が最高値となる時刻が心拍出量演算部10により自動検出される。血流の流量が最低値となる時刻または血流の流量が最高値となる時刻の検出方法としては、例えば一般的にパルスドプラの自動トレース等の処理に用いられる公知のアルゴリズムを用いて検出する方法が挙げられる。
図13は、血流の流量が最低値となる時刻を自動検出した例を示しており、自動検出された流量が最低となる時刻には、マーカM1が表示されている。このように心拍出量演算部10においてマーカM1を表示部12に表示させるための画像情報を作成し、グラフ上にマーカM1を表示させるようにしてもよい。
次に、心拍出量演算部10では、検出された時刻を用いて周期性の確認が行われる。すなわち、安定した周期が得られている時刻間、すなわち血流の流量が最低となるある時刻から次に血流の流量が最低となる時刻までの間が1周期分の区間として選択される。1周期分の区間として選択された時刻間における血流の流量は、図14に示すように1Volumeに対応する時間Tvおきの各瞬時流量で構成される。そして、心拍出量演算部10は、選択した1周期分の区間における血流の各瞬時流量を積算することにより、心拍出量を算出する。
このような血流の流量変化に基づく1心周期の検出方法には、心電図のECG信号に同期して1心周期を検出する方法に比べて被検体の体位移動による影響を受け難いという利点がある。
図15は、1心周期の検出に通常用いられる正常な安定したECG波形を呈する心電図を示し、図16は、被検体の体位変化によりECG波形が乱れた心電図の例を示す図である。
図15,図16において横軸は時間を示し、縦軸はECG信号の値を示す。図15に示すように正常な安定したECG波形を呈する心電図から1心周期を検出する手法がしばしばとられる。しかしながら、被検体の動きにより体位が変化すると、図16に示すようにECG波形に乱れが生じる。このため、図16に示すようなECG波形から1心周期を検出しようとすると、被検体の体位移動の影響を受けて適切に1心周期を検出できない恐れがある。
これに対し、血流の流量変化に基づいて1心周期を検出すれば、被検体の体位移動による影響を抑制し、適切に1心周期を検出することが可能となる。
さらに、上述したような1心周期の区間における血流の瞬時流量の積算による心拍出量の算出方法以外の方法で心拍出量を算出することもできる。例えば、複数周期分の区間に含まれる血流の瞬時流量を加算し、加算の対象となった区間に含まれる心拍数で除算することにより心拍平均をとれば、より安定した心拍出量を算出することができる。
このようにして得られる心拍出量は、心拍出量演算部10から表示部12に与えられて表示される。このため、操作者は、超音波診断装置1の表示部12を目視することにより、数値として被検体の心拍出量を知ることができる。心拍出量とともに表示されるカラードプラ像および血流の流量の時間変化グラフは、1Volume分の画像生成に必要な時間の経過に伴って常時更新される。そこで、心拍出量については、例えば1心拍ごとに算出し、表示部12に数値として表示させる心拍出量も常時更新させることができる。
ここで、複数周期分の区間に含まれる血流の瞬時流量から心拍平均により心拍出量を算出した場合には、心拍出量の演算に用いた血流の瞬時流量の範囲を表示部12に表示させることが診断に有用である場合がある。そこで、記号や色を用いて心拍出量の演算に用いた血流の瞬時流量の範囲を視覚的に表示部12に示すことも可能である。血流の瞬時流量の範囲を視覚的に表示させるための画像情報は、心拍出量演算部10において作成し、表示部12に出力することができる。
図17は、図1に示す表示部12に点線で示すマーカにより心拍出量の演算に用いた血流の瞬時流量の範囲を表示させた例を示す図、図18は、図1に示す表示部12に三角記号で示すマーカにより心拍出量の演算に用いた血流の瞬時流量の範囲を表示させた例を示す図、図19は、図1に示す表示部12に着色またはパターン表示により心拍出量の演算に用いた血流の瞬時流量の範囲を表示させた例を示す図である。
図17、図18、図19において、横軸は時間を示し、縦軸は血流の流量を示す。図17に示すように、心拍出量の演算に用いた血流の瞬時流量の区間を点線で示すマーカM2により視覚的に表示部12に表示させることができる。また、図18に示すように、心拍出量の演算に用いた血流の瞬時流量の区間を三角記号で示す2つのマーカM3により視覚的に表示部12に表示させることもできる。さらに、図19に示すように、心拍出量の演算に用いた血流の瞬時流量の区間を着色またはパターン表示することにより視覚的に表示部12に表示させることもできる。
そして、以上のように得られた3次元カラードプラ像、血流の流量の時間変化グラフおよび心拍出量は、表示部12に並列表示させることができる。
図20は、図1に示す超音波診断装置1の表示部12に3次元カラードプラ像、血流の流量の時間変化グラフおよび心拍出量を並列表示させた場合における画面の一例を示す図である。
図20に示すように表示部12の左側には、3次元の走査範囲とともにカラードプラ像Idが表示される。カラードプラ像Idには、別途作成したBモード画像を重畳表示させることもできる。カラードプラ像Id上には、血流の流量の算出範囲としてROIが設定される。また、表示部12の右側には、ROIとして設定されたある断面上における血流の流量の時間変化グラフが表示される。また、血流の流量の時間変化グラフと時間的に同期して心電図等の生体信号の時間変化を示すグラフを表示させることもできる。
さらに、表示部12の下部には、心拍出量が数値表示される。また、心拍出量の算出に用いた血流の瞬時流量の範囲は、点線で示すマーカM4により血流の流量の時間変化グラフ上において視覚的に示される。このため、操作者は表示部12を参照することによりリアルタイムに、或いは事後的にカラードプラ像Idとともに血流の流量や心拍出量を容易に知ることができる。
つまり以上のような超音波診断装置1は、3次元走査により得られるカラードプラ速度情報を用いて血流量の時間変化を求め、求めた血流量の時間変化をグラフとして視覚的に表示させるものである。超音波診断装置1に表示されるグラフの横軸である時間は、走査位置と相関関係を有する。
このため、超音波診断装置1によれば、操作者の記憶に頼ることなく、走査位置の移動による流量の変化の履歴を簡便に参照することができる。そして、血流量の時間変化グラフを参照しつつ走査を行えば、或いは走査後に血流量の時間変化グラフを参照すれば、血流量が最大になる走査位置を短時間で探すことができる。このため、最大の血流量を計測することが可能な走査位置で安定した走査を行うことが可能となる。
また、超音波診断装置1によれば、血流量の時間変化に基づいて心拍出量を求めることができる。このため、心電図に基づいて心拍出量を求める場合に比べて、被検体の体位の移動や呼吸による動きの影響を抑えることができる。これにより、良好な精度での血流量の計測を短時間で行うことが可能となる。さらに、診断の効率向上や操作者の負担軽減を図ることもできる。具体的には、心機能の診断効率および心拍出量の測定精度等の値として示される信頼性を格段に向上させることができる。
尚、上述した実施形態では、超音波の送受信による走査によって得られるカラードプラ速度情報から即時に血流量を演算し、かつ即時に血流量の時間変化グラフを表示させる、いわゆるリアルタイム処理を行う例を示したが、リアルタイム処理に限らず任意のタイミングで各処理を行うことができる。例えば、超音波走査後の任意のタイミングでカラードプラ速度情報からの血流量の演算および血流量の時間変化グラフの表示をそれぞれ行うことができる。
より具体的な例としては、超音波走査によってカラードプラ速度情報を取得した後、カラードプラ像を所定の時間分シネ画像メモリに記憶またはHDD(hard disk drive)に保存する場合が挙げられる。通常数心拍分に亘る複数枚のカラードプラ像の表示時間は、2秒から30秒程度であり、しばしばシネ画像メモリに記憶またはHDDに保存される。このような場合には、カラードプラ像の保存後の所望の機会に、必要なカラードプラ像を読み出して、血流量を計測したい空間的領域をROIとして設定することができる。そして、ROIとして設定された空間的領域におけるカラードプラ速度情報を用いて、上述したリアルタイム処理の場合と同様な方法で積分(加算)することによって血流の瞬時流量を求めることができる。さらに、複数のカラードプラ像に対して同様にROI内における血流の瞬時流量を求めれば、各カラードプラ像に対応するそれぞれの血流の瞬時流量から血流の流量の時間変化グラフを作成することができる。
また、上述した実施形態では、3次元走査により得られるカラードプラ速度情報のデータ群が等間隔に配列されたVolumeデータであるものとして説明した。しかし、カラードプラ速度情報のデータ群は、必ずしも等間隔に配列されたVolumeデータである必要はなく、カラードプラ像に向かって縦方向、横方向、奥行き方向のうち任意の方向におけるデータ間隔が他の方向におけるデータ間隔と異なっていても同様な血流量の時間変化グラフを作成することが可能である。
また、心臓にROIを設定し、心臓における血流の流量を求める例について説明したが、心臓に限らず任意の部位にROIを設定することができる。そして、心臓以外の任意の部位における血管内の流量を求め、グラフ表示させることができる。
1 超音波診断装置
2 送信回路
3 2次元(2D)アレイプローブ
4 受信回路
5 カラードプラ演算部
6 3次元デジタルスキャンコンバータ(3D-DSC)座標変換部
7 関心領域(ROI)入力部
8 流量演算部
9 流量−時間グラフ処理部
9a 生体信号取得部
10 心拍出量演算部
11 入力装置
12 表示部
2 送信回路
3 2次元(2D)アレイプローブ
4 受信回路
5 カラードプラ演算部
6 3次元デジタルスキャンコンバータ(3D-DSC)座標変換部
7 関心領域(ROI)入力部
8 流量演算部
9 流量−時間グラフ処理部
9a 生体信号取得部
10 心拍出量演算部
11 入力装置
12 表示部
Claims (9)
- プローブを動かしながら行われる超音波の3次元走査によって被検体から3次元のドプラ速度情報を取得するドプラ速度情報取得手段と、
前記3次元のドプラ速度情報を用いて、前記被検体に対する前記プローブの位置又は角度における血流の瞬時流量を求める瞬時流量算出手段と、
前記血流の瞬時流量から血流の流量の時間変化を示すグラフ情報を作成し、前記グラフ情報をリアルタイムで表示するグラフ表示手段と、
を有することを特徴とする超音波診断装置。 - 前記グラフ表示手段は、前記血流の流量の時間変化と時相を同期させて生体信号の時間変化が表示されるように前記グラフ情報を作成するように構成されることを特徴とする請求項1記載の超音波診断装置。
- 前記グラフ表示手段は、前記グラフ情報を前記3次元のドプラ速度情報から得られるドプラ像とともにリアルタイム表示させるように構成されることを特徴とする請求項1記載の超音波診断装置。
- 前記瞬時流量算出手段は、前記血流の瞬時流量を求めるために前記3次元のドプラ速度情報が不足する場合には、不足する3次元のドプラ速度情報を取得された他の3次元のドプラ速度情報から補間によって求めるように構成されることを特徴とする請求項1記載の超音波診断装置。
- 前記瞬時流量算出手段は、前記血流の瞬時流量を求めるために前記3次元のドプラ速度情報が不足する場合には、不足する3次元のドプラ速度情報を取得された他の3次元のドプラ速度情報から補間によって求め、かつ必要な補間精度が得られるような走査断面を決定するように構成されることを特徴とする請求項1記載の超音波診断装置。
- 前記グラフ情報から1心拍分の血流の流量を求める心拍出量算出手段をさらに備えることを特徴とする請求項1記載の超音波診断装置。
- 前記グラフ情報から周期的に変化する血流の流量の1周期分の区間を検出し、検出した前記1周期分の区間における前記血流の瞬時流量を積分することによって1心拍分の血流の流量を求める心拍出量算出手段をさらに備えることを特徴とする請求項1記載の超音波診断装置。
- 前記グラフ情報から周期的に変化する血流の流量の複数周期分の区間を検出し、検出した前記複数周期分の区間における前記血流の瞬時流量の積分値を、検出した周期の数を用いて平均処理することによって1心拍分の血流の流量を求める心拍出量算出手段をさらに備えることを特徴とする請求項1記載の超音波診断装置。
- コンピュータを、
プローブを動かしながら行われる超音波の3次元走査によって被検体から取得された3次元のドプラ速度情報を用いて、前記被検体に対する前記プローブの位置又は角度における血流の瞬時流量を求める瞬時流量算出手段、および
前記血流の瞬時流量から血流の流量の時間変化を示すグラフ情報を作成し、前記グラフ情報をリアルタイムで表示するグラフ表示手段と、
として機能させることを特徴とする超音波診断装置のデータ処理プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012209386A JP2012250083A (ja) | 2006-08-28 | 2012-09-24 | 超音波診断装置および超音波診断装置のデータ処理プログラム |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006230863 | 2006-08-28 | ||
| JP2006230863 | 2006-08-28 | ||
| JP2012209386A JP2012250083A (ja) | 2006-08-28 | 2012-09-24 | 超音波診断装置および超音波診断装置のデータ処理プログラム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007202042A Division JP5231768B2 (ja) | 2006-08-28 | 2007-08-02 | 超音波診断装置および超音波診断装置のデータ処理プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012250083A true JP2012250083A (ja) | 2012-12-20 |
Family
ID=39197570
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012209386A Pending JP2012250083A (ja) | 2006-08-28 | 2012-09-24 | 超音波診断装置および超音波診断装置のデータ処理プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20080051661A1 (ja) |
| JP (1) | JP2012250083A (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101060436B1 (ko) * | 2007-09-04 | 2011-08-29 | 삼성메디슨 주식회사 | 초음파 영상을 형성하는 초음파 시스템 및 방법 |
| CN101601593B (zh) * | 2008-06-10 | 2013-01-16 | 株式会社东芝 | 超声波诊断装置 |
| JP5259267B2 (ja) * | 2008-06-19 | 2013-08-07 | 株式会社東芝 | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム |
| JP2011087710A (ja) * | 2009-10-21 | 2011-05-06 | Toshiba Corp | 超音波診断装置 |
| KR100977367B1 (ko) * | 2009-10-28 | 2010-08-20 | (주)메디슨 | 3차원 pw 스펙트럼 초음파 진단 장치 및 3차원 pw 스펙트럼 데이터 생성 방법 |
| US9320496B2 (en) * | 2010-02-25 | 2016-04-26 | Siemens Medical Solutions Usa, Inc. | Volumetric is quantification for ultrasound diagnostic imaging |
| US8696579B2 (en) | 2010-06-04 | 2014-04-15 | Siemens Medical Solutions Usa, Inc. | Cardiac flow quantification with volumetric imaging data |
| CN104684488B (zh) * | 2012-09-27 | 2017-08-15 | 皇家飞利浦有限公司 | 用于超声狭窄评估的自动双平面‑pw工作流程 |
| KR102185726B1 (ko) | 2014-01-28 | 2020-12-02 | 삼성메디슨 주식회사 | 관심 영역에 대응하는 초음파 영상 표시 방법 및 이를 위한 초음파 장치 |
| KR20160087221A (ko) * | 2015-01-13 | 2016-07-21 | 삼성메디슨 주식회사 | 초음파 진단 장치 및 그 동작방법 |
| JP6194031B2 (ja) * | 2016-02-03 | 2017-09-06 | パイオニア株式会社 | 流体評価装置及び方法 |
| EP3493744B1 (en) * | 2016-08-02 | 2019-11-27 | Koninklijke Philips N.V. | System for determining cardiac output |
| CN110575198B (zh) * | 2018-06-08 | 2022-07-01 | 佳能医疗系统株式会社 | 解析装置及解析方法 |
| JP7449957B2 (ja) * | 2019-03-19 | 2024-03-14 | コーニンクレッカ フィリップス エヌ ヴェ | 三次元ボリューム流量の定量化測定 |
| CN113558659B (zh) * | 2021-07-30 | 2023-07-04 | 重庆安酷科技有限公司 | 一种高精度超声波肺功能检测仪及其检测方法 |
| CN114869335B (zh) * | 2022-04-07 | 2023-12-08 | 皖南医学院第一附属医院(皖南医学院弋矶山医院) | 一种局部血流指数的测定方法及设备 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0614922A (ja) * | 1992-03-26 | 1994-01-25 | Toshiba Corp | 超音波診断装置 |
| JPH0866399A (ja) * | 1994-06-22 | 1996-03-12 | Toshiba Corp | 超音波診断装置 |
| JPH09131346A (ja) * | 1995-11-07 | 1997-05-20 | Toshiba Corp | 2次元ドプラ超音波診断装置 |
| JP2000201930A (ja) * | 1999-01-19 | 2000-07-25 | Toshiba Corp | 3次元超音波診断装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5849137A (ja) * | 1981-09-18 | 1983-03-23 | 株式会社東芝 | 超音波血流測定装置 |
| US4476874A (en) * | 1982-06-01 | 1984-10-16 | Sri International | Ultrasonic imaging with volume flow measuring method and apparatus |
| US5769079A (en) * | 1996-10-22 | 1998-06-23 | Acuson Corporation | Method and apparatus for determining quantitative measures of flow parameters |
| US6423006B1 (en) * | 2000-01-21 | 2002-07-23 | Siemens Medical Solutions Usa, Inc. | Method and apparatus for automatic vessel tracking in ultrasound systems |
| US6419633B1 (en) * | 2000-09-15 | 2002-07-16 | Koninklijke Philips Electronics N.V. | 2D ultrasonic transducer array for two dimensional and three dimensional imaging |
| US6780155B2 (en) * | 2001-12-18 | 2004-08-24 | Koninklijke Philips Electronics | Method and system for ultrasound blood flow imaging and volume flow calculations |
| JP4202697B2 (ja) * | 2002-08-12 | 2008-12-24 | 株式会社東芝 | 超音波診断装置、超音波画像表示装置および超音波画像表示方法 |
-
2007
- 2007-08-24 US US11/844,652 patent/US20080051661A1/en not_active Abandoned
-
2012
- 2012-09-24 JP JP2012209386A patent/JP2012250083A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0614922A (ja) * | 1992-03-26 | 1994-01-25 | Toshiba Corp | 超音波診断装置 |
| JPH0866399A (ja) * | 1994-06-22 | 1996-03-12 | Toshiba Corp | 超音波診断装置 |
| JPH09131346A (ja) * | 1995-11-07 | 1997-05-20 | Toshiba Corp | 2次元ドプラ超音波診断装置 |
| JP2000201930A (ja) * | 1999-01-19 | 2000-07-25 | Toshiba Corp | 3次元超音波診断装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080051661A1 (en) | 2008-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5231768B2 (ja) | 超音波診断装置および超音波診断装置のデータ処理プログラム | |
| JP2012250083A (ja) | 超音波診断装置および超音波診断装置のデータ処理プログラム | |
| JP4745133B2 (ja) | 超音波診断装置、医用画像処理装置及び医用画像処理プログラム | |
| JP5624258B2 (ja) | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム | |
| JP6160487B2 (ja) | 超音波診断装置およびその制御方法 | |
| CN101066211B (zh) | 用于在超声波系统中显示信息的方法 | |
| JP5240994B2 (ja) | 超音波診断装置、超音波画像処理装置、及び超音波画像処理プログラム | |
| JP5509437B2 (ja) | 超音波診断装置 | |
| US20050085729A1 (en) | Ultrasonic image processor and ultrasonic diagnostic instrument | |
| JP2009136446A (ja) | 超音波診断装置、及び超音波診断装置の制御プログラム | |
| US9877698B2 (en) | Ultrasonic diagnosis apparatus and ultrasonic image processing apparatus | |
| JPH07178086A (ja) | 超音波診断装置及び超音波診断方法 | |
| JP5100084B2 (ja) | 超音波診断装置、画像処理装置、及び画像処理プログラム | |
| JP2008073423A (ja) | 超音波診断装置、診断パラメータ計測装置及び診断パラメータ計測方法 | |
| JP2007222533A (ja) | 超音波診断装置及び超音波画像処理方法 | |
| JP4149177B2 (ja) | 超音波診断装置及び画像処理装置 | |
| JP2007117252A (ja) | 超音波診断装置 | |
| US20100234730A1 (en) | Image processing device, ultrasonic imaging apparatus including the same, and image processing method | |
| JP4709937B2 (ja) | 超音波診断装置及び画像処理装置 | |
| JP2008289548A (ja) | 超音波診断装置及び診断パラメータ計測装置 | |
| JP6530961B2 (ja) | 超音波診断装置 | |
| JP2009112374A (ja) | 超音波診断装置、超音波画像処理装置、及び超音波画像処理プログラム | |
| JP5390081B2 (ja) | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム | |
| JP5331313B2 (ja) | 超音波診断装置 | |
| JP5784085B2 (ja) | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120924 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140311 |