JP2012220641A - アクチュエーター、光スキャナーおよび画像形成装置 - Google Patents
アクチュエーター、光スキャナーおよび画像形成装置 Download PDFInfo
- Publication number
- JP2012220641A JP2012220641A JP2011084841A JP2011084841A JP2012220641A JP 2012220641 A JP2012220641 A JP 2012220641A JP 2011084841 A JP2011084841 A JP 2011084841A JP 2011084841 A JP2011084841 A JP 2011084841A JP 2012220641 A JP2012220641 A JP 2012220641A
- Authority
- JP
- Japan
- Prior art keywords
- center axis
- plan
- view
- rotation center
- movable plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images












Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/16—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with polarised armatures moving in alternate directions by reversal or energisation of a single coil system
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/085—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting means being moved or deformed by electromagnetic means
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/04—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa
- H04N1/113—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using oscillating or rotating mirrors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/18—Mechanical movements
- Y10T74/18568—Reciprocating or oscillating to or from alternating rotary
Abstract
【解決手段】光スキャナー1は、光反射性を有する光反射部211を備える可動板21と、支持部22と、可動板21を支持部22に対して回動可能に連結する1対の連結部23、24とを有し、可動板21は、可動板21の回動中心軸(軸線X)に対して垂直な方向で両側へ突出する1対の突出部215、216と、軸線Xに対して平行な方向で両側に突出する1対の突出部213、214とを有する十字状をなし、突出部213〜216の突出長さが最適化されている。
【選択図】図4
Description
例えば、特許文献1には、可動板(可動部)と、支持枠(支持部)と、可動板を支持枠に対して捩り回動可能に支持する1対の弾性支持部(連結部)とを有し、各弾性支持部が2本の棒(梁部材)で構成された光偏向器が開示されている。
また、特許文献1に係る光偏向器では、可動板が平面視にて八角形をなしている。このような平面視形状をなす可動板は、回動軸から離れた位置での可動板の重量を小さくし、慣性モーメントを低減できるという利点がある。
しかし、平面視形状が八角形をなす可動板は、前述したような異方性エッチングを用いて製造した場合、結晶面との関係から、形状のばらつきが大きくなる。
本発明のアクチュエーターは、所定の回動中心軸まわりに回動可能な板状の可動部と、
前記可動部に連結し、かつ前記可動部の回動に伴って捩り変形する連結部と、
前記連結部を支持する支持部と、を有し、
前記可動部は、前記可動部の板厚方向からの平面視にて、前記回動中心軸に対して垂直な方向で両側へ突出する1対の第1突出部と、前記回動中心軸に対して平行な方向で両側に突出する1対の第2突出部とを有する十字状をなし、
前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記可動部の長さをAとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記可動部の長さをBとし、前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記第1突出部の長さをaとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記第2突出部の長さをbとしたときに、下記式(A)および(B)をそれぞれ満たすことを特徴とする。

これにより、可動板の回動時の慣性モーメントを効果的に低減することができる。
本発明のアクチュエーターでは、下記式(C)および(D)を満たすことが好ましい。
これにより、製造における可動部の形状ばらつきを小さくすることができる。
本発明のアクチュエーターでは、前記可動部、前記支持部および前記連結部は、シリコン基板を異方性エッチングすることにより形成されたものであることが好ましい。
これにより、形状ばらつきを小さくして、可動部、支持部および連結部を容易に形成することができる。
これにより、板面が(100)面で構成されたシリコン基板を異方性エッチングすることにより、形状ばらつきを小さくして、可動部、支持部および連結部を容易に形成することができる。
これにより、板面が(100)面で構成されたシリコン基板を異方性エッチングすることにより、シリコンの(111)面をエッチングの停止層として利用し、形状ばらつきを小さくして、可動部、支持部および連結部を容易に形成することができる。
これにより、可動部の慣性モーメントを低減することができる。また、このような溝は、板面が(100)面で構成されたシリコン基板を異方性エッチングすることにより、シリコンの(111)面をエッチングの停止層として利用し、形状ばらつきを小さくして、可動部を容易に形成することができる。
本発明のアクチュエーターでは、前記連結部の表面は、シリコンの(100)面および(111)面で構成されていることが好ましい。
これにより、シリコンの(111)面をエッチングの停止層として利用し、形状ばらつきを小さくして、連結部を容易に形成することができる。
前記可動部に連結し、かつ前記可動部の回動に伴って捩り変形する連結部と、
前記連結部を支持する支持部と、を有し、
前記可動部は、前記可動部の板厚方向からの平面視にて、前記回動中心軸に沿った1対の辺と前記回動中心軸に対して垂直な方向に沿った1対の辺とで構成された四角形の四隅の部分をそれぞれ四角形に欠いた形状をなし、
前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記可動部の長さをAとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向での前記可動部の長さをBとし、前記板厚方向からの平面視における前記四隅の部分の前記回動中心軸に対して垂直な方向の長さをaとし、前記可動部の平面視における前記四隅の部分の前記回動中心軸に対して平行な方向の長さをbとしたときに、下記式(A)および(B)をそれぞれ満たすことを特徴とする。
前記光反射部を備え、かつ所定の回動中心軸まわりに回動可能な板状の可動部と、
前記可動部に連結し、かつ前記可動部の回動に伴って捩り変形する連結部と、
前記連結部を支持する支持部と、を有し、
前記可動部は、前記可動部の板厚方向からの平面視にて、前記回動中心軸に対して垂直な方向で両側へ突出する1対の第1突出部と、前記回動中心軸に対して平行な方向で両側に突出する1対の第2突出部とを有する十字状をなし、
前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記可動部の長さをAとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記可動部の長さをBとし、前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記第1突出部の長さをaとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記第2突出部の長さをbとしたときに、下記式(A)および(B)をそれぞれ満たすことを特徴とする。
前記光源からの光を走査する光スキャナーと、を備え、
前記光スキャナーは、
光反射性を有する光反射部と、
前記光反射部を備え、かつ所定の回動中心軸まわりに回動可能な板状の可動部と、
前記可動部に連結し、かつ前記可動部の回動に伴って捩り変形する連結部と、
前記連結部を支持する支持部と、を有し、
前記可動部は、前記可動部の板厚方向からの平面視にて、前記回動中心軸に対して垂直な方向で両側へ突出する1対の第1突出部と、前記回動中心軸に対して平行な方向で両側に突出する1対の第2突出部とを有する十字状をなし、
前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記可動部の長さをAとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記可動部の長さをBとし、前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記第1突出部の長さをaとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記第2突出部の長さをbとしたときに、下記式(A)および(B)をそれぞれ満たすことを特徴とする。
<第1実施形態>
まず、本発明の光スキャナーの第1実施形態について説明する。
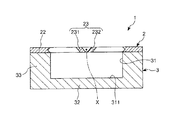
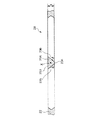
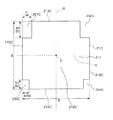
図1は、本発明の第1実施形態に係る光スキャナー(アクチュエーター)を示す平面図、図2は、図1中のA−A線断面図、図3は、図1に示す光スキャナーに備えられた可動板を説明するための平面図、図4は、図1中のB−B線断面図、図5は、図4の部分拡大断面図である。図6は、図1に示す光スキャナーの製造方法を説明する断面図、図7は、図1に示す光スキャナーの製造方法を説明する断面図である。図8は、図1に示す光スキャナーの製造方法を説明する断面図、図9は、図8(e)に示すエッチング工程における連結部の形成(マスクずれのない場合)を説明するための図、図10は、図8(e)に示すエッチング工程における連結部の形成(マスクずれのある場合)を説明するための図である。なお、以下では、説明の便宜上、図2、4〜10中の上側を「上」、下側を「下」と言う。
また、基体2は、光反射部211が設けられた可動板(可動部)21と、可動板21に連結する1対の連結部23、24と、1対の連結部23、24とを支持する支持部22とを有している。支持部22は連結部23、24を介して可動板21を支持しているとも言え、1対の連結部23、24は可動板21と支持部22とを連結しているとも言える。
このような光スキャナー1では、駆動部4の駆動力により、各連結部23、24を捩り変形させながら、可動板21を連結部23、24に沿った所定の軸まわりに回動させる。これにより、光反射部211で反射した光を所定の一方向に走査することができる。
[基体]
基体2は、前述したように、光反射部211が設けられた可動板21と、可動板21を支持する支持部22と、可動板21と支持部22とを連結する1対の連結部23、24とを有する。
また、このような基体2の上面および下面は、それぞれ、シリコンの(100)面で構成されている。また、支持部22の内周面、可動板21の側面、および、各連結部23、24の側面の軸線Xに平行な部分は、それぞれ、シリコンの(111)面で構成されている。
支持部22は、図1に示すように、枠状をなしている。より具体的には、支持部22は、四角環状をなしている。このような支持部22は、1対の連結部23、24を介して可動板21を支持する。なお、支持部22の形状としては、1対の連結部23、24を介して可動板21を支持することができれば、特に限定されず、例えば、各連結部23、24に対応して分割された形状をなしていてもよい。
可動板21は、板状をなしている。また、本実施形態では、可動板21は、可動板21の板厚方向からの平面視にて、可動板21の回動中心軸(軸線X)に沿った1対の辺と軸線Xに対して垂直な方向(線分Yに沿った方向)に沿った1対の辺とで構成された四角形の四隅の部分をそれぞれ四角形に欠いた形状(十字状)をなしている。これにより、可動板21の上面の光反射部211の面積(光反射領域)を十分に確保しつつ、可動板21の回動時の慣性モーメントを低減することができる。また、このような可動板21は後に詳述するようにシリコン基板を異方性エッチングすることにより、簡単かつ高精度に形成することができる。
言い換えると、可動板21の板厚方向からの平面視において、可動板21(本体部212)の外周に沿って、欠損部251、突出部213、欠損部252、突出部216、欠損部254、突出部214、欠損部252、突出部215がこの順で並んで設けられている。
このような突出部213〜216および欠損部251〜254は、それぞれ、可動板21の板厚方向からの平面視にて四角形をなしている。なお、図1、3では、各欠損部251〜254の平面視形状が正方形をなす状態を一例として図示している。また、突出部213〜216および欠損部251〜254の平面視形状の角部が丸み付けされていてもよい。可動板21の十字状の外形における角部には、所定の結晶面だけではなく複数の結晶面が現れるため角部は厳密には直角とならず、各欠損部251〜254は厳密には四角形ではない。しかし、本実施形態においては、上記の状態を含めて各欠損部251〜254は四角形であるとみなす。
また、可動板21は、平面視にて可動板21の中心Pを通りかつ可動板21の回動中心軸(軸線X)に対して垂直な線分Yに対して対称な形状をなしている。これにより、可動板の設計が容易となる。
また、可動板21の側面(特に軸線Xに平行な面)は、主として、シリコンの(111)面で構成されている。これにより、後述するように板面が(100)面で構成されたシリコン基板を異方性エッチングすることにより、シリコンの(111)面をエッチングの停止層として利用し、可動板21、支持部22および1対の連結部23、24を簡単かつ高精度に形成することができる。なお、可動板21の板厚方向からの平面視における外形の角部においては、可動板21の側面は(111)面以外の結晶面を含んでいる。従って、可動板21の側面は、少なくとも当該角部における側面を除いて、シリコンの(111)面で構成されている。
これに対し、長さa、bがそれぞれ前記下限値未満であると、可動板21の回動時における慣性モーメントを低減する効果が小さい傾向となる。そのため、可動板21の厚さによっては、可動板21の動撓みが大きくなり、光スキャナー1の光学特性を低下させる場合がある。
なお、図3では、上記式(A)、(B)を満たし、a、bをそれぞれ最大とした場合の可動板21A、a、bをそれぞれ最小とした場合の可動板21Bをそれぞれ鎖線で示している。
図3に示すように平面視にて可動板21に光Lの円形または楕円形のスポットが内接する場合、各欠損部251〜254が光Lのスポットの外側で面積が最大となるのは、a=(1−1/√2)A、b=(1−1/√2)Bである。また、このとき、各欠損部251〜254の角P3が光Lのスポットの外周縁状に位置し、a/b=A/Bである。
ただし、実際のレーザーは、上記有効範囲の外側であっても、若干の光が存在する。また、可動板21の回動時の慣性モーメントは、可動板21の動撓みが波長λ/4以下となるように抑えられていればよい。よって、a、bが上記値に対して若干小さかったり大きかったりしても、実使用上問題なく許容できる。
ここで、A=B=2.0mm、a=(1−1/√2)A[mm]、b=(1−1/√2)B[mm]とした場合を基準として、a、bをそれぞれ−20%とした場合、−200%とした場合、+205%とした場合の可動板21での反射光の輝度を目視により評価した結果を表1に示す。
また、上述したように、動撓みの許容範囲は、波長λ/4以下とされている。したがって、例えばλ=530nmの場合、動撓みの許容範囲は、133nm以下である。上記基準において、FEM解析により、機械角10°、駆動周波数18kHzで駆動したときの動撓みを求めると、動撓み量が122nmであり、上記許容範囲内となる。また、上記基準の−20%において、FEM解析により、機械角10°、駆動周波数18kHzで駆動したときの動撓みを求めると、動撓み量が130nmであり、上記許容範囲内となる。これに対し、上記基準の−25%において、FEM解析により、機械角10°、駆動周波数18kHzで駆動したときの動撓みを求めると、動撓み量が140nmであり、上記許容範囲外となる。
以上のようなことから、上記式(A)、(B)が得られる。
本実施形態では、可動板21の平面視における四隅の部分(欠損部251〜254)のそれぞれについて、a≦bの関係を満たす。これにより、可動板21の回動時の慣性モーメントを最も効果的に低減することができる。
また、下記式(C)および(D)を満たすのがより好ましい。
このような可動板21の上面には、光反射性を有する光反射部211が設けられている。一方、可動板21の下面には、後述する駆動部4の永久磁石41が設けられている。なお、永久磁石41については、後述する駆動部4の説明において詳述する。
より具体的には、各梁部材231、232の横断面の外形は、それぞれ、シリコンの(100)に沿った1対の辺と、シリコンの(111)面に沿った1対の辺とで構成された平行四辺形をなしている。すなわち、梁部材231は、上面2311および下面2312がそれぞれシリコンの(100)面で構成され、1対の側面2313、2314がそれぞれシリコンの(111)面で構成されている。同様に、梁部材232は、上面2321および下面2322がそれぞれシリコンの(100)面で構成され、1対の側面2323、2324がそれぞれシリコンの(111)面で構成されている。ここで、側面2313、2314、2323、2324は、それぞれ、シリコンの(111)面で構成されているので、基体2の上面または下面(すなわちシリコンの(100)面)に対する傾斜角θが54.73°となっている。このような横断面形状をなす各梁部材231、232は、板面がシリコンの(100)面で構成されたシリコン基板を異方性エッチングすることにより簡単かつ確実に形成することができる。
このように連結部23の外表面がシリコンの(100)面および(111)面で構成されていると、後述するようにシリコンの(111)面をエッチングの停止層として利用し、簡単かつ高精度に連結部23を形成することができる。
また、図5に示す断面において、連結部23全体の幅(梁部材231の側面2313と梁部材232の側面2323との面間距離)は、下側から上側に向けて拡がっている。
すなわち、1対の梁部材231、232間の距離は、可動板21の回動中心軸に平行な方向からみたときに、可動板21の一方の面側から他方の面側に向けて(本実施形態では下側から上側に向けて)漸増している。
また、1対の梁部材231、232の下側の端同士の間の距離をW1とし、1対の梁部材231、232の可動板21の厚さ方向での厚さをtとしたとき、下記式(1)を満たす。
このようにして、光スキャナー1は、駆動時の応力集中による破損を比較的簡単に防止することができる。
また、1対の梁部材231、232の上側の端同士の間の距離をW2としたとき、下記式(2)を満たす。
支持体3は、前述した基体2を支持する機能を有する。また、支持体3は、後述する駆動部4のコイル42を支持する機能をも有する。
この支持体3は、上方に開放する凹部31を有する箱状をなしている。言い換えると、支持体3は、板状をなす板状部32と、その板状部32の上面の外周部に沿って設けられた枠状をなす枠状部33とで構成されている。
このような支持体3の上面のうち凹部31の外側の部分、すなわち、枠状部33の上面には、前述した基体2の支持部22の下面が接合されている。これにより、基体2の可動板21および1対の連結部23、24と支持体3との間には、可動板21の回動を許容する空間が形成されている。
また、基体2と支持体3との接合方法としては、支持体3の構成材料、形状等に応じて適宜決められるものであり、特に限定されないが、接着剤を用いた方法、陽極接合法、直接接合法等が挙げられる。
駆動部4は、永久磁石41およびコイル42を有し、前述した基体2の可動板21を電磁駆動方式(より具体的にはムービングマグネット型の電磁駆動方式)により回動駆動させるものである。電磁駆動方式は、大きな駆動力を発生させることができる。そのため、電磁駆動方式を採用する駆動部4によれば、低駆動電圧化を図りつつ、可動板21の振れ角を大きくすることができる。
このような永久磁石41としては、特に限定されず、例えば、ネオジウム磁石、フェライト磁石、サマリウムコバルト磁石、アルニコ磁石、ボンド磁石などの、硬磁性体を着磁したものを好適に用いることができる。
まず、図示しない電源によりコイル42に例えば交番電圧を印加する。これにより、コイル42の上側(可動板21側)がN極、下側がS極となる第1の磁界と、コイル42の上側がS極、下側がN極となる第2の磁界とが、交互にかつ周期的に発生する。
第1の電界では、永久磁石41のN極側がコイル42に引きつけられ、反対にS極側がコイル42から遠ざかるように、可動板21が軸線Xを中心に図2にて反時計回りに回動する(第1の状態)。反対に、第2の電界では、永久磁石41のS極側がコイル42に引きつけられ、反対にN極側がコイル42から遠ざかるように、可動板21が軸線Xを中心に図2にて時計回りに回動する(第2の状態)。このような第1の状態と第2の状態とが交互に繰り返され、可動板21が軸線Xを中心に回動する。
以上のような光スキャナー1は、例えば、次のようにして製造することができる。以下、本発明のアクチュエーターの製造方法の一例として、図6ないし図10に基づいて、光スキャナー1の製造方法を説明する。また、図6ないし図8は、それぞれ、図2に対応する断面で示されており、図9および図10は、それぞれ、図5に対応する断面で示されている。
光スキャナー1の製造方法は、基体2を形成する工程を有する。
基体2を形成する工程は、[A]凹部218を形成する工程と、[B]可動板21、支持部22および1対の連結部23、24を形成する工程とを有する。
[A]凹部218を形成する工程
−A1−
まず、図6(a)に示すように、シリコン基板102を用意する。
このシリコン基板102は、後述するエッチングを経ることにより基体2となるものである。
具体的には、シリコン基板102は、その主面がシリコンの(100)面で構成されたものである。
次に、図6(b)に示すように、シリコン基板102の上面上に窒化膜51を形成するとともに、シリコン基板102の下面上に窒化膜52を形成する。
この窒化膜51、52は、それぞれ、例えば、SiNで構成されている。
また、窒化膜51、52の形成方法は、ぞれぞれ、特に限定されないが、例えば、プラズマCVD等の気相成膜法を用いることができる。
また、窒化膜51、52の厚さは、特に限定されないが、0.01μm以上0.2μm以下程度である。
なお、窒化膜51、52に代えて、SiOで構成された酸化膜を例えば熱酸化法により形成してもよい。
次に、図6(c)に示すように、窒化膜51上にレジスト膜61を形成し、図6(d)に示すように、窒化膜52上にレジスト膜62を形成する。
このレジスト膜61、62は、それぞれ、ポジ型またはネガ型のレジスト材料で構成されている。
−A4−
次に、レジスト膜62を露光および現像することにより、レジスト膜62の凹部218の形成領域に対応した部分を除去する。これにより、図6(e)に示すように、開口621を有するレジスト膜62Aを得る。
次に、レジスト膜62Aをマスクとして用いて、窒化膜52の一部をエッチングにより除去する。これにより、図6(f)に示すように、開口521を有する窒化膜52Aを得る。
上記エッチング(開口521の形成方法)としては、特に限定されないが、例えば、リアクティブイオンエッチング(RIE)、CF4を用いたドライエッチング等が挙げられる。
次に、レジスト膜61、62Aを除去する。これにより、図6(g)に示すように、シリコン基板102は、その上面が窒化膜51で覆われ、下面が窒化膜52Aで覆われた状態となる。
レジスト膜61、62の除去方法としては、特に限定されないが、例えば、硫酸による洗浄、O2アッシング等が挙げられる。
次に、窒化膜52Aをマスクとして用いて、シリコン基板102をエッチングする。これにより、図7(a)に示すように、凹部218を有するシリコン基板102Aを得る。
上記エッチング(凹部218の形成方法)としては、特に限定されないが、後述する可動板21、支持部22等の形成のためのエッチングと同様、異方性エッチングが好適に用いられる。
かかる異方性エッチングは、特に限定されないが、例えば、KOH水溶液等を用いたウェットエッチングにより行うことができる。
次に、窒化膜51、52Aを除去する。これにより、図7(b)に示すように、シリコン基板102Aの上面および下面が露出した状態となる。
窒化膜51、52Aの除去方法としては、特に限定されないが、上記工程A5と同様、例えば、リアクティブイオンエッチング(RIE)、CF4を用いたドライエッチング等が挙げられる。
−B1−
次に、図7(c)に示すように、シリコン基板102Aの上面上に窒化膜71を形成するとともに、シリコン基板102Aの下面上に窒化膜72を形成する。
この窒化膜71、72は、それぞれ、例えば、SiNで構成されている。
また、窒化膜71、72の厚さは、特に限定されないが、0.01μm以上0.3μm以下程度である。
なお、窒化膜71、72に代えて、SiOで構成された酸化膜を例えば熱酸化法により形成してもよい。
次に、図7(d)に示すように、窒化膜71上にレジスト膜81を形成する。
このレジスト膜81は、ポジ型またはネガ型のレジスト材料で構成されている。
−B3−
次に、レジスト膜81を露光および現像することにより、レジスト膜81の可動板21、支持部22および1対の連結部23、24の形成領域に対応した部分が残存するように、レジスト膜81の一部を除去する。これにより、図7(e)に示すように、開口811を有するレジスト膜81Aを得る。なお、図7(e)では図示しないが、レジスト膜81Aには、1対の梁部材231、232の上端同士の間の隙間に対応して形成された開口も形成されている。
次に、レジスト膜81Aをマスクとして用いて、窒化膜71の一部をエッチングにより除去する。これにより、図7(f)に示すように、開口711を有する窒化膜71Aを得る。なお、図7(f)では図示しないが、窒化膜71Aには、1対の梁部材231、232の上端同士の間の隙間に対応して形成された開口も形成されている。
上記エッチング(開口711の形成方法)としては、特に限定されないが、上記工程A5と同様、例えば、リアクティブイオンエッチング(RIE)、CF4を用いたドライエッチング等が挙げられる。
次に、レジスト膜81Aを除去する。これにより、図7(g)に示すように、シリコン基板102Aは、その上面が窒化膜71Aで覆われ、下面が窒化膜72で覆われた状態となる。
レジスト膜81Aの除去方法としては、特に限定されないが、例えば、硫酸による洗浄、O2アッシング等が挙げられる。
次に、図8(a)に示すように、窒化膜72上にレジスト膜82を形成する。
このレジスト膜82は、ポジ型またはネガ型のレジスト材料で構成されている。
−B7−
次に、レジスト膜82を露光および現像することにより、レジスト膜82の可動板21、支持部22および1対の連結部23、24の形成領域に対応した部分が残存するように、レジスト膜82の一部を除去する。これにより、図8(b)に示すように、開口821を有するレジスト膜82Aを得る。なお、図8(b)では図示しないが、レジスト膜82Aには、1対の梁部材231、232の下端同士の間の隙間に対応して形成された開口も形成されている。
次に、レジスト膜82Aをマスクとして用いて、窒化膜72の一部をエッチングにより除去する。これにより、図8(c)に示すように、開口721を有する窒化膜72Aを得る。なお、図8(c)では図示しないが、窒化膜72Aには、1対の梁部材231、232の下端同士の間の隙間に対応して形成された開口も形成されている。
上記エッチング(開口721の形成方法)としては、特に限定されないが、上記工程A5と同様、例えば、リアクティブイオンエッチング(RIE)、CF4を用いたドライエッチング等が挙げられる。
次に、レジスト膜82Aを除去する。これにより、図8(d)に示すように、シリコン基板102Aは、その上面が窒化膜71Aで覆われ、下面が窒化膜72Aで覆われた状態となる。
レジスト膜82Aの除去方法としては、特に限定されないが、例えば、硫酸による洗浄、O2アッシング等が挙げられる。
次に、窒化膜71A、72Aをマスクとして用いて、シリコン基板102Aを異方性エッチングする。これにより、図8(e)に示すように、基体2を得る。すなわち、本工程の異方性エッチングでは、第1のマスクである窒化膜72Aと第2のマスクである窒化膜71Aとを介してシリコン基板102Aをその両面側から異方性エッチングすることにより、可動板21、支持部22および1対の連結部23、24を形成する。
上記異方性エッチング(基体2の形成方法)は、特に限定されないが、例えば、KOH水溶液等を用いたウェットエッチングにより行うことができる。
ここで、かかる異方性エッチングによる連結部23の形成について詳述する。なお、連結部24の形成については、連結部23の形成と同様であるので、その説明を省略する。
ここで、開口724の幅をWm1とし、シリコン基板102Aの厚さをTとしたときに、下記式(3)の関係を満たす。
開口714の幅をWm2としたとき、下記式(4)を満たす。
以下、本工程の異方性エッチングにおける段差の発生について詳述する。
本工程における異方性エッチングに際し、マスクとして用いる窒化膜71A、72Aの形成位置がずれていない場合、図9(a)〜図9(d)に示すように、開口711、714を介してシリコン基板102Aの上面がエッチングされるとともに、開口721、724を介してシリコン基板102Aの下面がエッチングされていき、1対の梁部材231、232が形成される。
この場合、開口714および開口724の幅方向での中心位置が互いに幅方向で一致しているので、図9(d)に示すように、各梁部材231、232の各側面は、段差のない、シリコンの(111)面で構成された一定の傾斜面となる。
これに対し、段差2315は、窒化膜71Aの開口711および窒化膜72Aの開口721の幅はシリコン基板102Aの厚さに対して大きすぎるため、シリコン基板102Aの厚さ方向での中央に形成される。
そのため、段差2315と段差2316とはシリコン基板102Aの厚さ方向での位置が異なっている。同様に、段差2325と段差2326とはシリコン基板102Aの厚さ方向での位置が異なっている。
次に、窒化膜71A、72Aを除去する。これにより、図8(f)に示すように、基体2の上面および下面が露出した状態となる。
窒化膜71A、72Aの除去方法としては、特に限定されないが、上記工程A5と同様、例えば、リアクティブイオンエッチング(RIE)、CF4を用いたドライエッチング、熱りん酸によるウェットプロセス等が挙げられる。
また、必要に応じて、基体2の角部を丸める処理を行う。
かかる処理(丸め処理)は、特に限定されないが、例えば、フッ酸と硝酸と酢酸(または水)とによる等方性エッチング、熱処理(減圧下、1000〜1200℃程度、H2を導入したAr雰囲気下)等が挙げられる。
また、可動板21の上面に、金属膜を形成し、光反射部211を形成する。この金属膜の形成方法としては、特に限定されず、真空蒸着、スパッタリング(低温スパッタリング)、イオンプレーティング等の乾式メッキ法、電解メッキ、無電解メッキ等の湿式メッキ法、溶射法、金属箔の接合等が挙げられる。
また、図示しないが、支持体3上にコイル42を設け、支持体3と基体2とを接合する。
以上の工程により、光スキャナー1が得られる。
以上説明したような第1実施形態に係る光スキャナー1(アクチュエーター)によれば、可動板21が平面視にて十字状をなし、かつ、前記式(A)および(B)を満たすので、可動板21の光反射領域を確保しながら、可動板21の回動時の慣性モーメントを低減することができる。
また、シリコン基板を異方性エッチングすることにより、可動板21を簡単かつ高精度に形成することができる。
次に、本発明の第2実施形態について説明する。
図11は、本発明の第2実施形態に係る光スキャナーを示す平面図、図12は、図11中のB−B線部分拡大断面図である。
以下、第2実施形態の光スキャナーについて、前述した実施形態の光スキャナーとの相違点を中心に説明し、同様の事項については、その説明を省略する。
本実施形態の光スキャナー1Aは、図11に示すように、振動系を有する基体2Aを有している。基体2Aは、可動板21と、支持部22と、可動板21を支持部22に対して回動可能に連結する1対の連結部23A、24Aとを有する。
連結部23Aは、軸線Xに沿って設けられている。また、連結部23Aは、その横断面形状が台形をなしている。
より具体的には、連結部23Aは、軸線Xに平行な方向からみたときに(言い換えると、図12に示す断面でみたとき)、上下に延び軸線Xを通る線分に対して対称(図12にて左右対称)な形状をなしている。
また、図12に示す断面において、連結部23A全体の幅は、下側から上側に向けて拡がっている。
以上説明したような第2実施形態の光スキャナー1Aによっても、光反射領域を確保しながら可動板の回動時の慣性モーメントを低減するとともに、可動板の寸法精度を簡単に優れたものとすることができる。
次に、本発明の第3実施形態について説明する。
図13は、本発明の第3実施形態に係る光スキャナーに備えられた可動板を説明するための平面図である。
以下、第3実施形態の光スキャナーについて、前述した実施形態の光スキャナーとの相違点を中心に説明し、同様の事項については、その説明を省略する。
第3実施形態の光スキャナーは、可動板の平面視形状が異なる以外は、第1実施形態の光スキャナー1とほぼ同様である。なお、前述した実施形態と同様の構成には、同一符号を付してある。
そして、可動板21Cの外周に沿った方向における突出部213Cと突出部215Cとの間には、欠損部251Cが形成されている。また、可動板21Cの外周に沿った方向における突出部213Cと突出部216Cとの間には、欠損部252Cが形成されている。また、可動板21Cの外周に沿った方向における突出部214Cと突出部216Cとの間には、欠損部254Cが形成されている。また、可動板21Cの外周に沿った方向における突出部214Cと突出部215Cとの間には、欠損部253Cが形成されている。
より具体的に説明すると、欠損部251の線分Y方向に沿った長さをa1とし、欠損部251Cの軸線X方向に沿った長さをb1としたとき、a1<b1の関係を満たす。すなわち、欠損部251Cは、軸線X方向に沿った長さが線分Y方向に沿った長さよりも長い長方形をなしている。これにより、可動板21Cの軸線Xから遠位の端部の質量を効率的に低減することができる。そのため、可動板21Cの回動時の慣性モーメントを効果的に抑えることができる。
また、この可動板21Cにおいても、可動板21Cの平面視における線分Y方向での長さをAとし、可動板21Cの軸線X方向での長さをBとし、各欠損部251C〜254Cの線分Y方向での長さをaとし、各欠損部251C〜254Cの軸線X方向での長さをbとしたとき、前記式(A)、(B)をそれぞれ満たす。
以上説明したような第3実施形態の光スキャナーによっても、光反射領域を確保しながら可動板の回動時の慣性モーメントを低減するとともに、可動板の寸法精度を簡単に優れたものとすることができる。
次に、本発明の第4実施形態について説明する。
図14は、本発明の第4実施形態に係る光スキャナーに備えられた可動板を説明するための平面図である。
以下、第4実施形態の光スキャナーについて、前述した実施形態の光スキャナーとの相違点を中心に説明し、同様の事項については、その説明を省略する。
第4実施形態の光スキャナーは、可動板の平面視形状が異なる以外は、第1実施形態の光スキャナー1とほぼ同様である。なお、前述した実施形態と同様の構成には、同一符号を付してある。
そして、可動板21Dの外周に沿った方向における突出部213Dと突出部215Dとの間には、欠損部251Dが形成されている。また、可動板21Dの外周に沿った方向における突出部213Dと突出部216Dとの間には、欠損部252Dが形成されている。また、可動板21Dの外周に沿った方向における突出部214Dと突出部216Dとの間には、欠損部254Dが形成されている。また、可動板21Dの外周に沿った方向における突出部214Dと突出部215Dとの間には、欠損部253Dが形成されている。
また、可動板21Dの平面視における四隅の部分(欠損部251D〜254D)のうち、可動板21Dの回動中心軸(軸線X)に対して一方側(図14中の左側)に位置する2つの部分(欠損部251D、253D)について、a≦bの関係を満たし、可動板21Dの回動中心軸(軸線X)に対して他方側(図14中の右側)に位置する他の2つの部分(欠損部252D、254D)について、b≦aの関係を満たす。これにより、可動板21Dが平面視にて回動中心軸に対して非対称な形状であっても、可動板21Dの重心と可動板21Dの回動中心軸とのズレを抑えることができる。
また、この可動板21Dにおいても、可動板21Dの平面視における線分Y方向での長さをAとし、可動板21Dの軸線X方向での長さをBとし、各欠損部251D〜254Dの線分Y方向での長さをaとし、各欠損部251D〜254Dの軸線X方向での長さをbとしたとき、前記式(A)、(B)をそれぞれ満たす。
以上説明したような光スキャナーは、例えば、プロジェクター、レーザープリンター、イメージング用ディスプレイ、バーコードリーダー、走査型共焦点顕微鏡などの画像形成装置に好適に適用することができる。その結果、優れた描画特性を有する画像形成装置を提供することができる。
ここで、図15に基づいて、本発明の画像形成装置の一例を説明する。
図15は、本発明の画像形成装置の構成の一例を示す概略図である。なお、以下では、説明の便宜上、スクリーンSCの長手方向を「横方向」といい、長手方向に直角な方向を「縦方向」という。
光源装置91は、赤色光を照出する赤色光源装置911と、青色光を照出する青色光源装置912と、緑色光を照出する緑色光源装置913とを備えている。
クロスダイクロイックプリズム92は、4つの直角プリズムを貼り合わせて構成され、赤色光源装置911、青色光源装置912、緑色光源装置913のそれぞれから照出された光を合成する光学素子である。
まず、クロスダイクロイックプリズム92で合成された光は、光スキャナー93によって横方向に走査される(主走査)。そして、この横方向に走査された光は、光スキャナー94によってさらに縦方向に走査される(副走査)。これにより、2次元カラー画像をスクリーンSC上に形成することができる。このような光スキャナー93、94として本発明の光スキャナーを用いることで、極めて優れた描画特性を発揮することができる。
このように構成されたプロジェクター9によれば、前述した光スキャナー1と同様の構成の光スキャナー93、94を備えるので、安価に、高品位な画像を得ることができる。
また、前述した実施形態では、本発明のアクチュエーターを光スキャナーに適用した場合を例に説明したが、本発明のアクチュエーターは、これに限定されず、例えば、光スイッチ、光アッテネータ等の他の光学デバイスに適用することも可能である。
また、前述した実施形態では、可動板を回動させる駆動部がムービングマグネット型の電磁駆動方式を採用した構成を例に説明したが、かかる駆動部は、ムービングコイル型の電磁駆動方式であってもよいし、また、静電駆動方式、圧電駆動方式等の電磁駆動方式以外の駆動方式を採用するものであってもよい。
Claims (12)
- 所定の回動中心軸まわりに回動可能な板状の可動部と、
前記可動部に連結し、かつ前記可動部の回動に伴って捩り変形する連結部と、
前記連結部を支持する支持部と、を有し、
前記可動部は、前記可動部の板厚方向からの平面視にて、前記回動中心軸に対して垂直な方向で両側へ突出する1対の第1突出部と、前記回動中心軸に対して平行な方向で両側に突出する1対の第2突出部とを有する十字状をなし、
前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記可動部の長さをAとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記可動部の長さをBとし、前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記第1突出部の長さをaとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記第2突出部の長さをbとしたときに、下記式(A)および(B)をそれぞれ満たすことを特徴とするアクチュエーター。
- 前記可動部は、a≦bの関係を満たす請求項1に記載のアクチュエーター。
- 下記式(C)および(D)を満たす請求項1または2に記載のアクチュエーター。
- 前記板厚方向からの平面視における前記可動部の外形は、主として、前記可動部の回動中心軸に平行な線分と、前記可動部の回動中心軸に対して垂直な線分とで構成されている請求項1ないし3のいずれかに記載のアクチュエーター。
- 前記可動部、前記支持部および前記連結部は、シリコン基板を異方性エッチングすることにより形成されたものである請求項1ないし4のいずれかに記載のアクチュエーター。
- 前記可動部の板面は、シリコンの(100)面で構成されている請求項5に記載のアクチュエーター。
- 前記可動部の側面は、主として、シリコンの(111)面で構成されている請求項5または6に記載のアクチュエーター。
- 前記可動部の側面には、前記可動部の板面に直交する断面においてV字状をなす溝が形成されている請求項7に記載のアクチュエーター。
- 前記連結部の表面は、シリコンの(100)面および(111)面で構成されている請求項5ないし8のいずれかに記載のアクチュエーター。
- 所定の回動中心軸まわりに回動可能な板状の可動部と、
前記可動部に連結し、かつ前記可動部の回動に伴って捩り変形する連結部と、
前記連結部を支持する支持部と、を有し、
前記可動部は、前記可動部の板厚方向からの平面視にて、前記回動中心軸に沿った1対の辺と前記回動中心軸に対して垂直な方向に沿った1対の辺とで構成された四角形の四隅の部分をそれぞれ四角形に欠いた形状をなし、
前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記可動部の長さをAとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向での前記可動部の長さをBとし、前記板厚方向からの平面視における前記四隅の部分の前記回動中心軸に対して垂直な方向の長さをaとし、前記可動部の平面視における前記四隅の部分の前記回動中心軸に対して平行な方向の長さをbとしたときに、下記式(A)および(B)をそれぞれ満たすことを特徴とするアクチュエーター。
- 光反射性を有する光反射部と、
前記光反射部を備え、かつ所定の回動中心軸まわりに回動可能な板状の可動部と、
前記可動部に連結し、かつ前記可動部の回動に伴って捩り変形する連結部と、
前記連結部を支持する支持部と、を有し、
前記可動部は、前記可動部の板厚方向からの平面視にて、前記回動中心軸に対して垂直な方向で両側へ突出する1対の第1突出部と、前記回動中心軸に対して平行な方向で両側に突出する1対の第2突出部とを有する十字状をなし、
前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記可動部の長さをAとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記可動部の長さをBとし、前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記第1突出部の長さをaとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記第2突出部の長さをbとしたときに、下記式(A)および(B)をそれぞれ満たすことを特徴とする光スキャナー。
- 光を出射する光源と、
前記光源からの光を走査する光スキャナーと、を備え、
前記光スキャナーは、
光反射性を有する光反射部と、
前記光反射部を備え、かつ所定の回動中心軸まわりに回動可能な板状の可動部と、
前記可動部に連結し、かつ前記可動部の回動に伴って捩り変形する連結部と、
前記連結部を支持する支持部と、を有し、
前記可動部は、前記可動部の板厚方向からの平面視にて、前記回動中心軸に対して垂直な方向で両側へ突出する1対の第1突出部と、前記回動中心軸に対して平行な方向で両側に突出する1対の第2突出部とを有する十字状をなし、
前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記可動部の長さをAとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記可動部の長さをBとし、前記板厚方向からの平面視における前記回動中心軸に対して垂直な方向の前記第1突出部の長さをaとし、前記板厚方向からの平面視における前記回動中心軸に対して平行な方向の前記第2突出部の長さをbとしたときに、下記式(A)および(B)をそれぞれ満たすことを特徴とする画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011084841A JP2012220641A (ja) | 2011-04-06 | 2011-04-06 | アクチュエーター、光スキャナーおよび画像形成装置 |
| US13/439,239 US8614831B2 (en) | 2011-04-06 | 2012-04-04 | Actuator and optical scanner |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011084841A JP2012220641A (ja) | 2011-04-06 | 2011-04-06 | アクチュエーター、光スキャナーおよび画像形成装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012220641A true JP2012220641A (ja) | 2012-11-12 |
| JP2012220641A5 JP2012220641A5 (ja) | 2014-05-15 |
Family
ID=46965927
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011084841A Withdrawn JP2012220641A (ja) | 2011-04-06 | 2011-04-06 | アクチュエーター、光スキャナーおよび画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8614831B2 (ja) |
| JP (1) | JP2012220641A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5842356B2 (ja) * | 2011-03-24 | 2016-01-13 | セイコーエプソン株式会社 | アクチュエーター、光スキャナーおよび画像形成装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003131161A (ja) * | 2001-07-11 | 2003-05-08 | Canon Inc | 光偏向器及びその製造方法、それを用いた光学機器そしてねじれ揺動体 |
| JP2009089501A (ja) * | 2007-09-28 | 2009-04-23 | Nippon Signal Co Ltd:The | プレーナ型電磁アクチュエータ |
| JP2011128203A (ja) * | 2009-12-15 | 2011-06-30 | Toyota Central R&D Labs Inc | 光学装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4641378B2 (ja) * | 2004-02-16 | 2011-03-02 | キヤノン株式会社 | 光走査装置及びそれを有する画像表示装置 |
| JP4193817B2 (ja) * | 2005-06-22 | 2008-12-10 | セイコーエプソン株式会社 | アクチュエータ |
| JP2009069675A (ja) | 2007-09-14 | 2009-04-02 | Ricoh Co Ltd | 光スキャナ、光走査装置、画像形成装置及び光スキャナの製造方法 |
| JP2009148847A (ja) | 2007-12-19 | 2009-07-09 | Canon Inc | 異方性エッチングによる構造体の作製方法、及びエッチングマスク付きシリコン基板 |
| JP2011170370A (ja) | 2008-03-13 | 2011-09-01 | Seiko Epson Corp | 光偏向器及びその製造方法 |
| JP5521359B2 (ja) | 2008-03-13 | 2014-06-11 | セイコーエプソン株式会社 | 光偏向器及びその製造方法 |
| JP2011107675A (ja) | 2009-10-20 | 2011-06-02 | Seiko Epson Corp | 光偏向素子、光偏向器、及び画像形成装置 |
-
2011
- 2011-04-06 JP JP2011084841A patent/JP2012220641A/ja not_active Withdrawn
-
2012
- 2012-04-04 US US13/439,239 patent/US8614831B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003131161A (ja) * | 2001-07-11 | 2003-05-08 | Canon Inc | 光偏向器及びその製造方法、それを用いた光学機器そしてねじれ揺動体 |
| JP2009089501A (ja) * | 2007-09-28 | 2009-04-23 | Nippon Signal Co Ltd:The | プレーナ型電磁アクチュエータ |
| JP2011128203A (ja) * | 2009-12-15 | 2011-06-30 | Toyota Central R&D Labs Inc | 光学装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120257261A1 (en) | 2012-10-11 |
| US8614831B2 (en) | 2013-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5842356B2 (ja) | アクチュエーター、光スキャナーおよび画像形成装置 | |
| JP5842369B2 (ja) | アクチュエーターの製造方法、光スキャナーの製造方法および画像形成装置の製造方法、アクチュエーター、光スキャナーおよび画像形成装置 | |
| JP5909862B2 (ja) | アクチュエーター、光スキャナーおよび画像形成装置 | |
| US8988750B2 (en) | Optical scanner, mirror chip, method of manufacturing optical scanner, and image forming apparatus | |
| JP5333286B2 (ja) | 光スキャナーおよび画像形成装置 | |
| JP5834431B2 (ja) | アクチュエーター、アクチュエーターの製造方法、光スキャナーおよび画像形成装置 | |
| JP5640687B2 (ja) | アクチュエーター、アクチュエーターの製造方法、光スキャナーおよび画像形成装置 | |
| US8928962B2 (en) | Optical device, method for manufacturing optical device, and optical scanner | |
| JP2012220641A (ja) | アクチュエーター、光スキャナーおよび画像形成装置 | |
| JP5842837B2 (ja) | アクチュエーター、光スキャナーおよび画像形成装置 | |
| JP2012123117A (ja) | アクチュエーター、光スキャナーおよび画像形成装置 | |
| JP6003025B2 (ja) | アクチュエーター、光スキャナーおよび画像形成装置 | |
| JP5909914B2 (ja) | アクチュエーター、光スキャナーおよび画像形成装置 | |
| JP5354162B2 (ja) | 光学デバイス、光スキャナ及び画像形成装置 | |
| JP2011048229A (ja) | 光スキャナおよび画像形成装置 | |
| JP5168735B2 (ja) | 光学デバイス、光スキャナ及び画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140402 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140402 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150901 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20151020 |