JP2012202686A - Fbg振動センサ - Google Patents
Fbg振動センサ Download PDFInfo
- Publication number
- JP2012202686A JP2012202686A JP2011064275A JP2011064275A JP2012202686A JP 2012202686 A JP2012202686 A JP 2012202686A JP 2011064275 A JP2011064275 A JP 2011064275A JP 2011064275 A JP2011064275 A JP 2011064275A JP 2012202686 A JP2012202686 A JP 2012202686A
- Authority
- JP
- Japan
- Prior art keywords
- fbg
- optical fiber
- vibration
- elastic member
- leaf spring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 239000013307 optical fiber Substances 0.000 claims abstract description 86
- 230000005489 elastic deformation Effects 0.000 claims abstract description 11
- 238000005259 measurement Methods 0.000 abstract description 23
- 239000000853 adhesive Substances 0.000 abstract description 10
- 230000001070 adhesive effect Effects 0.000 abstract description 9
- 230000035945 sensitivity Effects 0.000 description 13
- 230000008602 contraction Effects 0.000 description 11
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 3
- 238000001228 spectrum Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 238000005253 cladding Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




Landscapes
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
Abstract
【課題】振動測定時における温度補償を行いつつ、小型化することを実現したFBG振動センサを提供することを目的とする。
【解決手段】FBG振動センサ1は、振動体Wに固定端2b側が固定される板バネ2を備えている。板バネ2の自由端2c側には錘4が設けられており、振動体Wの振動に同期して板バネ2が弾性変形する。また、板バネ2の上部表面2a上には、FBG5が形成された光ファイバ3が固定されている。光ファイバ3は、FBG5を間に挟む一対の接着剤7a、7bによって板バネ2に固定されており、FBG5にはプリテンションFが作用している。振動体Wの振動は、板バネ2の弾性変形に応じてFBG5に生じるひずみに基づいて測定される。また、板バネ2は、光ファイバ3の熱膨張係数と同一の熱膨張係数を有しており、FBG5に作用するプリテンションFが一定に保たれる。
【選択図】図3
【解決手段】FBG振動センサ1は、振動体Wに固定端2b側が固定される板バネ2を備えている。板バネ2の自由端2c側には錘4が設けられており、振動体Wの振動に同期して板バネ2が弾性変形する。また、板バネ2の上部表面2a上には、FBG5が形成された光ファイバ3が固定されている。光ファイバ3は、FBG5を間に挟む一対の接着剤7a、7bによって板バネ2に固定されており、FBG5にはプリテンションFが作用している。振動体Wの振動は、板バネ2の弾性変形に応じてFBG5に生じるひずみに基づいて測定される。また、板バネ2は、光ファイバ3の熱膨張係数と同一の熱膨張係数を有しており、FBG5に作用するプリテンションFが一定に保たれる。
【選択図】図3
Description
この発明は、振動体の振動を測定するFBG振動センサに係り、特に、振動測定時における温度補償を行うための構成に関する。
近年、例えば測定対象物のひずみ量等の物理量を測定するためのセンサに、FBG(ファイバブラッググレーティング)が形成された光ファイバが利用される。FBGとは、光ファイバのコアの屈折率を軸方向に沿った所定の長さ周期(グレーティング周期)で変化させた回折格子であって、光ファイバへの入射光に対し、グレーティング周期に応じた特定の波長(ブラッグ波長)を有する光を反射し、残りの光を透過するという特性を有するものである。
例えば特許文献1には、FBGを利用して測定対象物に生じるひずみを測定する光ファイバセンサが開示されている。これによれば、光ファイバと測定対象物とが、FBGを間に挟むように配置された一対の金属板を介して固定されている。測定対象物にひずみが生じるとFBGにもひずみが生じ、そのひずみ量に応じてグレーティング周期が変化するため、ブラッグ波長が長波長側または短波長側にシフトする。したがって、ブラッグ波長のシフト量を測定することにより、測定対象物のひずみ量を求めることが可能となる。
また、特許文献1に記載されているような光ファイバセンサは、振動体の振動を測定するための振動センサとして適用することが可能となっている。具体的には、振動体の振動に同期して弾性変形する弾性部材を準備し、この部材が弾性変形する際に生じる伸張ひずみ及び圧縮ひずみが光ファイバに印加されるように構成すれば、ブラッグ波長のシフト量及びシフト周期に基づいて振動体の振動量及び振動周期を求めることが可能となる。
ここで、特許文献1に記載されているような光ファイバセンサを用いて圧縮ひずみを測定する場合、FBGに緩みが生じた状態では圧縮ひずみが印加されてもグレーティング周期が変化しないため、FBGに対して予め所定の張力を与えておくこと、すなわちプリテンションを与えておくことが必要となる。しかしながら、光ファイバと測定対象物とが互いに異なる熱膨張係数を有する場合、これらの部材が測定時の雰囲気温度に応じて熱膨張または熱収縮する量も互いに異なるものとなる。すなわち、FBGに与えられていたプリテンションが雰囲気温度に応じて変化してしまうため、ひずみ量の測定感度も変化するという問題点が生じる。特に、光ファイバの熱膨張量が測定対象物の熱膨張量を上回った場合、または光ファイバの熱収縮量が測定対象物の熱収縮量を下回った場合にFBGに緩みが生じると、圧縮ひずみを測定することが不可能になるという問題点が生じる。
尚、特許文献1に記載の光ファイバセンサはひずみセンサとして適用されたものであるが、この光ファイバセンサを上述したように振動センサとして適用した場合においても問題点は共通のものである。
この発明は、このような問題点を解決するためになされたもので、雰囲気温度に応じた温度補償を行うことにより測定感度を一定に保つことを実現したFBG振動センサを提供することを目的とする。
この発明に係る振動センサは、振動体の振動に伴って弾性変形可能な弾性部材と、所定の張力が作用した状態で弾性部材に固定され、弾性部材の弾性変形量に応じて入射光に対する反射光の波長と入射光に対する透過光の波長とを変化させるFBGを有する光ファイバとを備え、反射光の波長の変化量または透過光の波長の変化量に基づいて振動体の振動を測定するFBG振動センサにおいて、弾性部材の熱膨張係数は、光ファイバの熱膨張係数と同一の値であることを特徴とするものである。
振動体の振動に伴って弾性部材が弾性変形すると、光ファイバのFBGに伸張ひずみ及び圧縮ひずみが生じて反射光または透過光の波長が変化するため、その変化量及び変化周期に基づいて振動体の振動量及び振動周期が求められる。このように振動を測定する際、弾性部材及び光ファイバは雰囲気温度に応じて熱膨張または熱収縮するが、これらの熱膨張係数は同一であるため、熱膨張量及び熱収縮量も同一となる。すなわち、FBGに作用するプリテンションによる張力は雰囲気温度にかかわらず一定となり、温度補償された状態となるため、弾性部材の弾性変形に伴ってFBGに印加される伸張ひずみ及び圧縮ひずみに対し、一定の感度で反射光または透過光の波長を変化させることが可能となる。したがって、FBG振動センサにおいて、雰囲気温度に応じた温度補償を行うことにより測定感度を一定に保つことが可能となる。
弾性部材は平板状であり、弾性部材の一方の端部は振動体に固定可能であり、弾性部材の他方の端部は錘が取り付け可能であってもよい。弾性部材の他方の端部側に錘を取り付けることにより、振動体の振動に伴って弾性部材が弾性変形する際、弾性部材の一方の端部側に作用する曲げモーメントが増大される。すなわち、他方の端部側に錘を取り付けない場合と比較すると、所定量のひずみをFBGに生じさせるために必要となる弾性部材の長さが短縮される。したがって、FBG振動センサを小型化することが可能となる。
光ファイバを前記弾性部材に固定する一対の取り付け部材をさらに備え、一対の取り付け部材は、FBGの長さ以上の間隔をおいて配置され、FBGは間隔の内側に対応する部位に配置されてもよい。
また、光ファイバ及び弾性部材は長手方向をそれぞれ有し、弾性部材の長手方向と光ファイバの長手方向とが互いに沿うように配置されてもよい。
また、光ファイバ及び弾性部材は長手方向をそれぞれ有し、弾性部材の長手方向と光ファイバの長手方向とが互いに沿うように配置されてもよい。
また、この発明に係るFBG振動センサは、車両の衝突を検知する車両用センサとして用いられ、この場合の車両用センサは、車両は複数の被測定部を有し、光ファイバは複数の被測定部に設けられる複数のFBGを有し、複数の被測定部の少なくとも1つから対応するFBGに印加される振動に基づいて、車両の衝突を検知することを特徴とする。
この発明によれば、FBG振動センサにおいて、雰囲気温度に応じた温度補償を行うことにより測定感度を一定に保つことが可能となる。
以下に、この発明の実施の形態について添付図に基づいて説明する。
実施の形態1.
図1に、この発明の実施の形態1に係るFBG振動センサ1を概略的に示す。
FBG振動センサ1は、振動体W(図3参照)の振動を測定するセンサであって、矩形に形成された平板状の弾性部材である板バネ2と、板バネ2の上部表面2a上に固定される光ファイバ3とを備えている。板バネ2は、図1の矢印Aで示される方向を長手方向とする部材であって、この長手方向における一方の端部が、振動体Wに固定される固定端2bとなっている。一方、板バネ2の他方の端部は自由端2cとなっており、その上部表面2a上には、所定の質量を有する錘4が取り付けられている。光ファイバ3は、その軸方向が矢印Aで示される方向に沿って延びるように、すなわち板バネ2の長手方向と光ファイバ3の長手方向とが互い沿うように、板バネ2の中央部に配置されている。また、光ファイバ3は、以下に説明するFBG(ファイバブラッググレーティング)5を有しており、FBG5が板バネ2の上部表面2a上に配置されている。
実施の形態1.
図1に、この発明の実施の形態1に係るFBG振動センサ1を概略的に示す。
FBG振動センサ1は、振動体W(図3参照)の振動を測定するセンサであって、矩形に形成された平板状の弾性部材である板バネ2と、板バネ2の上部表面2a上に固定される光ファイバ3とを備えている。板バネ2は、図1の矢印Aで示される方向を長手方向とする部材であって、この長手方向における一方の端部が、振動体Wに固定される固定端2bとなっている。一方、板バネ2の他方の端部は自由端2cとなっており、その上部表面2a上には、所定の質量を有する錘4が取り付けられている。光ファイバ3は、その軸方向が矢印Aで示される方向に沿って延びるように、すなわち板バネ2の長手方向と光ファイバ3の長手方向とが互い沿うように、板バネ2の中央部に配置されている。また、光ファイバ3は、以下に説明するFBG(ファイバブラッググレーティング)5を有しており、FBG5が板バネ2の上部表面2a上に配置されている。
図2に示すように、光ファイバ3は、図示しない光源から入射される入射光L1が伝播するコア11と、コア11の外周部を覆うクラッド12とを有しており、例えば石英ガラス等の材料から形成されている。FBG5は、コア11の屈折率を軸方向に沿った所定の長さ周期(グレーティング周期)Λで変化させた回折格子であって、入射光L1に対し、ブラッグ波長と呼ばれる特定の波長を有する光を反射光L2として反射し、残りの光を透過光L3として透過するという特性を有している。ここで、FBG5におけるグレーティング周期Λは、ブラッグ波長を規定する要素の1つとなっている。すなわち、FBG5に軸方向のひずみが生じると、それに伴ってグレーティング周期Λも変化するため、グレーティング周期Λの変化量に応じてブラッグ波長がシフトする。具体的には、FBG5に伸張ひずみが生じるとブラッグ波長は長波長側にシフトし、FBG5に圧縮ひずみが生じるとブラッグ波長は短波長側にシフトする。
ブラッグ波長のシフト量はFBG5のひずみ量に比例するため、ブラッグ波長のシフト量を測定することにより、FBG5に印加されたひずみ量を求めることが可能となっている。尚、FBG5が透過する透過光L3は、光ファイバ3に入射される入射光L1からブラッグ波長を有する反射光L2を除いたものであるため、ブラッグ波長のシフト量は、反射光L2だけではなく、透過光L3から求めることも可能となっている。また、FBG5は、光ファイバ3のコア11に紫外線等を照射することによって形成される。
次に、FBG振動センサ1が振動体Wに取り付けられている状態を図3に示す。
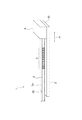
図3に示すように、振動体Wに対するFBG振動センサ1の設置は、板バネ2の固定端2b側を、固定部材6を介して振動体Wに固定することによって行われる。固定部材6は、一方の端面6a側に開口する溝部6bを有しており、この溝部6b内に板バネ2の固定端2bが挿入され、接着等によって固定されている。また、固定部材6の他方の端面6cは接着等によって振動体Wに固定されており、それにより、振動体Wと板バネ2とが一体として固定された状態となっている。したがって、振動体Wが矢印B1で示される方向に振動すると、その振動が固定部材6を介して板バネ2に伝達され、矢印B2及び矢印B3で示される方向における板バネ2の弾性変形が振動体Wの振動に同期して繰り返される。
図3に示すように、振動体Wに対するFBG振動センサ1の設置は、板バネ2の固定端2b側を、固定部材6を介して振動体Wに固定することによって行われる。固定部材6は、一方の端面6a側に開口する溝部6bを有しており、この溝部6b内に板バネ2の固定端2bが挿入され、接着等によって固定されている。また、固定部材6の他方の端面6cは接着等によって振動体Wに固定されており、それにより、振動体Wと板バネ2とが一体として固定された状態となっている。したがって、振動体Wが矢印B1で示される方向に振動すると、その振動が固定部材6を介して板バネ2に伝達され、矢印B2及び矢印B3で示される方向における板バネ2の弾性変形が振動体Wの振動に同期して繰り返される。
光ファイバ3の一方の端部は、錘4に隣接する部位で切断されている。また、光ファイバ3の他方の端部は、固定部材6の内部に導かれるとともに、固定部材6の側部に形成された図示しない貫通孔から外部に引き出されている。固定部材6の外部に引き出された光ファイバ3には、光ファイバ3に入射光L1(図2参照)を入射するための図示しない光源や、FBG5からの反射光L2(図2参照)を測定するための、すなわちブラッグ波長を測定するための図示しない計測器等が接続されている。
また、光ファイバ3は、固定部材6に隣接する部位に塗布された接着剤7aと、錘4に隣接する部位に塗布された接着剤7bとによって、板バネ2の上部表面2aに固定されており、FBG5には、所定の張力であるプリテンションFが作用した状態となっている。接着剤7a及び接着剤7bは、FBG5の軸方向に沿った長さd1以上の間隔d2をおいて配置されており、この間隔d1の内側に対応する部位にFBG5が配置されている。ここで、接着剤7a及び接着剤7bは、FBG振動センサ1における取り付け部材を構成するものである。尚、光ファイバ3を板バネ2に固定する箇所の一方を固定部材6に隣接する部位、すなわち板バネ2が弾性変形したときに最大の応力が作用する部位としたことにより、板バネ2の弾性変形を確実にFBG5に伝達することが可能となっている。
振動体Wの振動に伴って板バネ2が矢印B2で示される方向に弾性変形すると、その弾性変形量に応じてFBG5に圧縮ひずみが生じるため、FBG5のグレーティング周期Λが変化してブラッグ波長が短波長側にシフトする。一方、振動体Wの振動に伴って板バネ2が矢印B3で示される方向に弾性変形すると、その弾性変形量に応じた伸張ひずみがFBG5に生じるため、FBG5のグレーティング周期Λが変化してブラッグ波長が長波長側にシフトする。尚、FBG5に作用するプリテンションFの値は、板バネ2が矢印B2で示される方向に弾性変形してFBG5に圧縮ひずみが生じた場合に、FBG5に緩みが生じることのない値が予め選択される。
以上のように構成されるFBG振動センサ1において、板バネ2は、光ファイバ3の熱膨張係数と同一となる値の熱膨張係数を有する材料から形成されている。以下に、板バネ2の熱膨張係数と光ファイバ3の熱膨張係数とが同一である場合と互いに異なる場合との差異について、図4(a)及び図4(b)を用いて詳細に説明する。
図4(a)に示すように、板バネ2の熱膨張係数が光ファイバ3の熱膨張係数より大きい場合、FBG振動センサ1の周囲温度である雰囲気温度が板バネ2と光ファイバ3とが接着された時点の温度T0から温度T1に上昇すると、板バネ2の熱膨張量(直線C11参照)が光ファイバ3の熱膨張量(直線C12参照)を上回るため、FBG5に作用するプリテンションFが増加する。プリテンションFが増加することにより、FBG5のグレーティング周期も変化してしまうため、温度T0の時点と同様の感度で振動の測定を行うことが不可能となる。
図4(a)に示すように、板バネ2の熱膨張係数が光ファイバ3の熱膨張係数より大きい場合、FBG振動センサ1の周囲温度である雰囲気温度が板バネ2と光ファイバ3とが接着された時点の温度T0から温度T1に上昇すると、板バネ2の熱膨張量(直線C11参照)が光ファイバ3の熱膨張量(直線C12参照)を上回るため、FBG5に作用するプリテンションFが増加する。プリテンションFが増加することにより、FBG5のグレーティング周期も変化してしまうため、温度T0の時点と同様の感度で振動の測定を行うことが不可能となる。
逆に、雰囲気温度が温度T0から温度T2に低下すると、板バネ2の熱収縮量(直線C11参照)が光ファイバ3の熱収縮量(直線C12参照)を上回ってプリテンションFが減少する。また、板バネ2及び光ファイバ3の熱収縮量の差が大きくなり、FBG5にプリテンションFを作用させることが可能な範囲を超えてしまうと、FBG5に緩みが生じた状態となるため、FBG5に生じる圧縮ひずみを測定することが不可能となる。一方、本発明における板バネ2と光ファイバ3とは同一の熱膨張係数を有しているため、これらの熱膨張量(及び熱収縮量)を示す直線C21、C22は、互いに重なり合って同一の直線となる。すなわち、雰囲気温度の変化に対し、板バネ2と光ファイバ3とが同一量で熱膨張または熱収縮するようになっているため、FBG5に作用するプリテンションFは、雰囲気温度の変化にかかわらず一定に保たれる。したがって、板バネ2の熱膨張係数と光ファイバ3の熱膨張係数とが互いに異なる場合のように、雰囲気温度に応じて測定感度が変化してしまうことや、FBG5に緩みが生じて圧縮ひずみの測定が不可能となることがない。
また、図4(b)に示すように板バネ2の熱膨張係数が光ファイバ3の熱膨張係数より小さい場合、雰囲気温度が温度T0から温度T1に上昇すると、板バネ2の熱膨張量(直線C13参照)が光ファイバ3の熱膨張量(直線C14参照)を下回ってプリテンションFが減少する。また、これらの熱膨張量の差異が大きくなってFBG5に緩みが生じると、圧縮ひずみを測定することが不可能となる。逆に、雰囲気温度が温度T0から温度T2に低下すると、板バネ2の熱収縮量(直線C13参照)が光ファイバ3の熱収縮量(直線C14参照)を上回ってプリテンションFが増加する。一方、本発明における板バネ2と光ファイバ3とは同一量で熱膨張または熱収縮(直線C21、22参照)するため、雰囲気温度にかかわらず、測定感度が一定に保たれる。
次に、この発明の実施の形態1に係るFBG振動センサ1を用いて振動体Wの振動を測定する方法、及び振動体Wの振動を測定する際のFBG振動センサ1の動作について説明する。
図3に示すように、まず、固定部材6の端面6cを接着等によって振動体Wに固定することにより、FBG振動センサ1が振動体Wに固定される。尚、固定部材6に対する板バネ2の固定は、振動体Wに対する固定部材6の固定前及び固定後のどちらで行ってもよい。次いで、固定部材6の図示しない貫通孔から外部に引き出されている光ファイバ3に対し、図示しない光源や図示しない計測器等が接続される。この計測器は、FBG5のブラッグ波長のシフト量及びシフト周期に基づいて、振動体Wの振動量及び振動周期を算出するものである。
図3に示すように、まず、固定部材6の端面6cを接着等によって振動体Wに固定することにより、FBG振動センサ1が振動体Wに固定される。尚、固定部材6に対する板バネ2の固定は、振動体Wに対する固定部材6の固定前及び固定後のどちらで行ってもよい。次いで、固定部材6の図示しない貫通孔から外部に引き出されている光ファイバ3に対し、図示しない光源や図示しない計測器等が接続される。この計測器は、FBG5のブラッグ波長のシフト量及びシフト周期に基づいて、振動体Wの振動量及び振動周期を算出するものである。
振動体WにFBG振動センサ1が固定されると、図示しない光源から光ファイバ3に入射光L1(図2参照)が入射される。入射光L1に対し、FBG5はブラッグ波長を有する光を反射光L2として反射し、残りの光を透過光L3として透過する(図2参照)。このような状態で、振動体Wが矢印B1で示される方向に振動すると、その振動が固定部材6を介して板バネ2に伝達され、矢印B2及び矢印B3で示される方向への板バネ2の弾性変形が振動体Wの振動に同期して繰り返される。また、板バネ2の弾性変形は二箇所の接着剤7a、7bを介して光ファイバ3に伝達されるため、これらの接着剤7a、7bの間に配置されているFBG5には、板バネ2の弾性変形量に応じた伸張ひずみ(矢印B3の方向に弾性変形する場合)及び圧縮ひずみ(矢印B2の方向に弾性変形する場合)が周期的に印加される。
尚、板バネ2の自由端2c側には錘4が設けられているため、板バネ2が弾性変形する際に固定端2b側に作用する曲げモーメントが増大された状態となっている。したがって、自由端2c側に錘4を設けない場合と比較すると、所定量のひずみをFBG5に生じさせるために必要となる板バネ2の長さを短縮してFBG振動センサ1を小型化することが可能となっている。
FBG5に伸張ひずみ及び圧縮ひずみが周期的に印加されることに伴い、グレーティング周期Λの周期的な伸縮が繰り返される。また、グレーティング周期Λの周期的な伸縮に伴い、ブラッグ波長の長波長側及び短波長側への周期的なシフトが繰り返される。光ファイバ3に接続された図示しない計測器はブラッグ波長を常時監視しており、ブラッグ波長のシフト量及びシフト周期に基づいて、振動体Wの振動量及び振動周期が算出される。ここで、板バネ2及び光ファイバ3は雰囲気温度の変化に応じて熱膨張または熱収縮するが、これらの熱膨張係数は同一の値であるため、FBG5に作用しているプリテンションFが雰囲気温度の変化に起因して変化することがない。すなわち、
FBG5には、温度補償が行われて常に一定のプリテンションFが作用した状態となっているため、プリテンションFの変化に起因して測定感度が変化してしまうことや、FBG5に緩みが生じて圧縮ひずみの測定が不可能となることがない。
FBG5には、温度補償が行われて常に一定のプリテンションFが作用した状態となっているため、プリテンションFの変化に起因して測定感度が変化してしまうことや、FBG5に緩みが生じて圧縮ひずみの測定が不可能となることがない。
このように、FBG5を有する光ファイバ3を板バネ2に固定したので、振動体Wの振動に伴って板バネ2が弾性変形すると、光ファイバ3のFBG5にひずみが生じてブラッグ波長がシフトする。したがって、ブラッグ波長のシフト量及びシフト周期に基づいて振動体Wの振動量及び振動周期が求められる。振動を測定する際、板バネ2及び光ファイバ3は雰囲気温度に応じて熱膨張または熱収縮するが、これらの熱膨張係数は同一であるため、熱膨張量及び熱収縮量も同一となる。すなわち、FBG5に作用するプリテンションFは雰囲気温度にかかわらず一定となり、温度補償された状態となるため、板バネ2の弾性変形に伴ってFBG5に印加される伸張ひずみ及び圧縮ひずみに対し、一定の感度で反射光L2または透過光L3の波長を変化させることが可能となる。したがって、FBG振動センサ1において、雰囲気温度に応じた温度補償を行うことにより測定感度を一定に保つことが可能となる。
また、板バネ2の自由端2cに錘4を設けたので、振動体Wの振動に伴って板バネ2が弾性変形する際、板バネ2の固定端2b側に作用する曲げモーメントが増大される。すなわち、錘4を設けない場合と比較すると、所定量のひずみをFBG5に生じさせるために必要となる板バネ2の長さが短縮されるため、FBG振動センサ1を小型化することが可能となる。
実施の形態2.
次に、この発明の実施の形態2に係るFBG振動センサについて説明する。この実施の形態2に係るFBG振動センサは、実施の形態1におけるFBG振動センサ1がFBG5からの反射光L2に基づいて振動体Wの振動を測定していたのに対し、透過光L3に基づいて振動を測定するように構成したものである(図2、3参照)。尚、以下に説明する実施の形態において、図1〜4に示される符号と同一の符号は同一または同様な構成要素であるので、その詳細な説明は省略する。
次に、この発明の実施の形態2に係るFBG振動センサについて説明する。この実施の形態2に係るFBG振動センサは、実施の形態1におけるFBG振動センサ1がFBG5からの反射光L2に基づいて振動体Wの振動を測定していたのに対し、透過光L3に基づいて振動を測定するように構成したものである(図2、3参照)。尚、以下に説明する実施の形態において、図1〜4に示される符号と同一の符号は同一または同様な構成要素であるので、その詳細な説明は省略する。
図5に示すように、FBG振動センサ21における板バネ2の上部表面2a上には、貫通孔24aを有する錘24と、貫通孔24aを貫通して延びる光ファイバ23とが固定されている。光ファイバ23の一方の端部側23aには、入射光L1を光ファイバ23に入射するための図示しない光源が接続されている。また、錘24の貫通孔24aを貫通した光ファイバ13の端部側23bには、FBG5が透過した透過光L3を測定可能な図示しない計測器が接続されている。他の構成については、実施の形態1と同様である。
以上のように構成されるFBG振動センサ21において、図示しない計測器によって測定される透過光L3のスペクトルは、入射光L1に対して反射光L2の波長、すなわちブラッグ波長が欠落した状態のスペクトルとなる。したがって、透過光L3のスペクトルからブラッグ波長の欠落した部分のシフト量及びシフト周期を読み取ることにより、振動体Wの振動量及び振動周期を算出することが可能となる。すなわち、透過光L3を利用して振動体Wの振動測定を行う場合においても、実施の形態1と同様に、雰囲気温度に応じた温度補償を行って測定感度を一定に保つという効果を得ることが可能となる。
また、実施の形態1におけるFBG振動センサ1のように、FBG5からの反射光L2を利用して振動測定を行う場合、反射光L2を計測器に導くためにサーキュレータ等を用いることが一般的である。一方、FBG振動センサ21のように透過光L3を利用する場合、光ファイバ23の一端側に光源を接続し、他端側に計測器を接続すれば振動の測定を行うことが可能となるため、サーキュレータ等を用いることが不要となり、振動を計測するシステム全体としての構成が簡素化される。
実施の形態3.
次に、この発明の実施の形態3に係るFBG振動センサについて説明する。この実施の形態3に係るFBG振動センサは、車両の衝突を検知する車両用センサとして適用されたものであり、単一の光ファイバに対してFBG及び板バネが複数となるように構成されている。
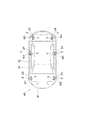
図6に示すように、車両用センサ31は、例えばエアバッグ等の機器を作動させるために車両40の衝突を検知するセンサであって、車両40は、例えばボディー41の前部、中間部及び後部における両側等に、実施の形態1、2における振動体Wに相当する複数の被測定部W1〜W6を有している。また、ボディー41の内部には、各被測定部W1〜W6を順次通過するように単一の光ファイバ33が敷設されている。
次に、この発明の実施の形態3に係るFBG振動センサについて説明する。この実施の形態3に係るFBG振動センサは、車両の衝突を検知する車両用センサとして適用されたものであり、単一の光ファイバに対してFBG及び板バネが複数となるように構成されている。
図6に示すように、車両用センサ31は、例えばエアバッグ等の機器を作動させるために車両40の衝突を検知するセンサであって、車両40は、例えばボディー41の前部、中間部及び後部における両側等に、実施の形態1、2における振動体Wに相当する複数の被測定部W1〜W6を有している。また、ボディー41の内部には、各被測定部W1〜W6を順次通過するように単一の光ファイバ33が敷設されている。
各被測定部W1〜W6には、実施の形態2におけるFBG振動センサ21と同様に、貫通孔24aを有する錘24が設けられた板バネ2が固定されている。また、光ファイバ33は複数のFBG5を有しており、FBG5が形成された各部位が被測定部W1〜W6における板バネ2上でそれぞれ固定されている。すなわち、車両用センサ31は、実施の形態2におけるFBG振動センサ21を各被測定部W1〜W2にそれぞれ設け、これらを単一の光ファイバ33によって直列に接続したものである。尚、光ファイバ33の一端には、光ファイバ33に入射光L1(図2参照)を入射するための図示しない光源が接続されている。また、光ファイバ33の他端には、被測定部W1〜W6に対応する各FBG5が透過した透過光L3(図2参照)を測定して振動の有無を検出可能な図示しない検知部が接続されている。この検知部は、車両40の図示しない制御部に電気的に接続されており、検知部から制御部への出力に基づいて、エアバッグ等の機器の作動が制御される。他の構成については実施の形態2と同様である。
以上のように構成される車両用センサ31において、車両40が衝突を起こして各被測定部W1〜W6の少なくとも一箇所が振動すると、振動した箇所に対応する板バネ2が弾性変形するのに伴ってFBG5におけるブラッグ波長がシフトする。図示しない制御部は、各被測定部W1〜W6における振動量や振動周期が予め設定された値を上回ると、車両40が衝突したと判断してエアバッグ等の機器を作動させる。ここで、車両用センサ31では、実施の形態1、2と同様に振動測定を行う際の温度補償が行われるため、車両40内の温度変化にかかわらずFBG5へのプリテンションFを一定に保つことが可能となっている。すなわち、振動を一定の感度で雰囲気温度に起因する誤差なく測定することが可能となっている。また、車両用センサ31にように、単一の光ファイバ33に対してFBG及び板バネが複数となるように構成した場合、光ファイバ33が断線すると検知部に透過光が届かなくなるため、断線の有無の判定を行うことが可能となる。
実施の形態1(図3参照)において、振動体Wに対するFBG振動センサ1の固定は、固定部材6の溝部6b内に板バネ2の固定端2b側を固定することによって行われたが、固定部材6を用いること、及び固定部材6が溝部6bを有することに限定するものではない。振動体Wの振動をFBG振動センサ1に伝達することが可能であればよいため、板バネ2を直接振動体Wに接着することや、例えば板バネ2の両側部を保持するような固定部材を用いることも可能である。
また、実施の形態1(図3参照)において、光ファイバ3は接着剤7a、7bによって二箇所で板バネ2に固定されたが、板バネ2に対する光ファイバ3の固定構造を限定するものではない。板バネ2の弾性変形を光ファイバ3のFBG5に伝達可能であればよく、例えば板バネ2と光ファイバ3との固定を三箇所以上で固定を行うことや、全面で固定することも可能である。
実施の形態3における車両用センサは、各FBGが透過する透過光に基づいて振動の測定が行われるように構成されたが、透過光を利用することに限定されるものではない。入射光が光源から入射される方向における上流側に計測器を配置し、各FBGからの反射光を計測器に導くためのサーキュレータ等を設ければ、反射光に基づいて振動の測定を行うことも可能である。この場合、光ファイバに断線が生じると、断線箇所より上流側、すなわち光源側に配置されているFBGからの反射光のみが計測器に導かれ、断線箇所より下流側に配置されているFBGからの反射光は計測器に届かなくなる。したがって、光ファイバの断線の有無を判定する他に、断線箇所を特定することが可能となる。
実施の形態1〜3における弾性部材は、長手方向を有する矩形、すなわち長方形に形成された平板状の部材として形成されているが、弾性部材の形状を限定するものではない。振動体の振動に伴って弾性変形可能であればよく、例えば、長手方向を有さない正方形や円形等の形状とすること、あるいはその他の多角形や棒状等の形状とすることも可能である。
1,21 FBG振動センサ、2 板バネ(弾性部材)、2b 固定端、2c 自由端、3,23,33 光ファイバ、4,24 錘、5 FBG、7a,7b (一対の)取り付け部材、31 車両用センサ、40 車両、d1 FBGの長さ、d2 一対の取り付け部材の間隔、F プリテンション(張力)、L1 入射光、L2 反射光、L3 透過光、W 振動体、W1〜W6 被測定部。
Claims (5)
- 振動体の振動に伴って弾性変形可能な弾性部材と、
所定の張力が作用した状態で前記弾性部材に固定され、前記弾性部材の弾性変形量に応じて入射光に対する反射光の波長と前記入射光に対する透過光の波長とを変化させるFBGを有する光ファイバと
を備え、前記反射光の波長の変化量または前記透過光の波長の変化量に基づいて前記振動体の振動を測定するFBG振動センサにおいて、
前記弾性部材の熱膨張係数は、前記光ファイバの熱膨張係数と同一の値であることを特徴とするFBG振動センサ。 - 前記弾性部材は平板状であり、前記弾性部材の一方の端部は前記振動体に固定可能であり、前記弾性部材の他方の端部は錘が取り付け可能である請求項1に記載のFBG振動センサ。
- 前記光ファイバを前記弾性部材に固定する一対の取り付け部材をさらに備え、
前記一対の取り付け部材は、前記FBGの長さ以上の間隔をおいて配置され、前記FBGは前記間隔の内側に対応する部位に配置される請求項1または2に記載のFBG振動センサ。 - 前記光ファイバ及び前記弾性部材は長手方向をそれぞれ有し、
前記弾性部材の長手方向と前記光ファイバの長手方向とが互いに沿うように配置される請求項1〜3のいずれか一項に記載のFBG振動センサ。 - 請求項1〜4のいずれか一項に記載のFBG振動センサを用いて車両の衝突を検知する車両用センサであって、
前記車両は複数の被測定部を有し、
前記光ファイバは前記複数の被測定部に設けられる複数の前記FBGを有し、
前記複数の被測定部の少なくとも1つから対応する前記FBGに印加される振動に基づいて、前記車両の衝突を検知する車両用センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011064275A JP2012202686A (ja) | 2011-03-23 | 2011-03-23 | Fbg振動センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011064275A JP2012202686A (ja) | 2011-03-23 | 2011-03-23 | Fbg振動センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012202686A true JP2012202686A (ja) | 2012-10-22 |
Family
ID=47183873
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011064275A Withdrawn JP2012202686A (ja) | 2011-03-23 | 2011-03-23 | Fbg振動センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012202686A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3187841A4 (en) * | 2014-08-25 | 2018-04-25 | Nuctech Company Limited | Fibre bragg grating vibration sensor and vibration measurement element thereof |
| CN114777900A (zh) * | 2022-03-31 | 2022-07-22 | 西安交通大学 | 一种具有温度自补偿功能的光纤振动传感器 |
| CN116499576A (zh) * | 2023-06-27 | 2023-07-28 | 山东省计算中心(国家超级计算济南中心) | 一种光纤光栅振动传感器及其测量方法 |
-
2011
- 2011-03-23 JP JP2011064275A patent/JP2012202686A/ja not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3187841A4 (en) * | 2014-08-25 | 2018-04-25 | Nuctech Company Limited | Fibre bragg grating vibration sensor and vibration measurement element thereof |
| CN114777900A (zh) * | 2022-03-31 | 2022-07-22 | 西安交通大学 | 一种具有温度自补偿功能的光纤振动传感器 |
| CN116499576A (zh) * | 2023-06-27 | 2023-07-28 | 山东省计算中心(国家超级计算济南中心) | 一种光纤光栅振动传感器及其测量方法 |
| CN116499576B (zh) * | 2023-06-27 | 2023-09-12 | 山东省计算中心(国家超级计算济南中心) | 一种光纤光栅振动传感器及其测量方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20070193362A1 (en) | Fiber optic strain gage | |
| JP2010112867A (ja) | 振動又は弾性波検出装置 | |
| CN110121651B (zh) | 加速度检测设备和方法及检测至少两个空间方向上的加速度的设备 | |
| JP2005091151A (ja) | Fbgひずみゲージ | |
| JP6301963B2 (ja) | 歪みセンサ及び歪みセンサの設置方法 | |
| JP2003222507A (ja) | 光ファイバセンサ及びそれを利用した歪み監視システム | |
| JP2012202686A (ja) | Fbg振動センサ | |
| WO2012144272A1 (ja) | Fbgひずみセンサ | |
| KR101203700B1 (ko) | 광섬유격자센서 및 이를 이용한 온도/스트레인 측정 시스템 | |
| JP6864375B2 (ja) | 光ファイバセンサ | |
| JP2005055450A (ja) | 光ファイバ式ひずみゲージ | |
| JP3711905B2 (ja) | 光ファイバグレーティング歪センサ及び歪計測方法 | |
| JP2012202684A (ja) | Fbgひずみセンサ | |
| CN103697828A (zh) | 一种支持解耦温度和应变的光纤光栅应变传感器 | |
| JP2007024527A (ja) | 光ファイバセンサ及びセンサシステム | |
| JP7047366B2 (ja) | 光ファイバセンサ | |
| JP2012202685A (ja) | Fbg振動センサ | |
| KR100685186B1 (ko) | 광섬유 기반의 가속도계/경사계 | |
| JP3755601B2 (ja) | Fbg式温度センサ | |
| US8590385B2 (en) | High pressure fiber optic sensor system | |
| JP2005030796A (ja) | 光式加速度計 | |
| JP6736044B2 (ja) | 歪みセンサ及び歪みセンサの取付治具 | |
| JP2016217852A (ja) | 変位量測定システム及び変位量測定方法 | |
| KR20130098724A (ko) | 온도 보상구조를 갖는 광섬유격자 압력변위센서 | |
| JPH11101617A (ja) | 構造体ひずみ監視方法およびその監視装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140603 |