JP2012173775A - ポンプ制御システム - Google Patents
ポンプ制御システム Download PDFInfo
- Publication number
- JP2012173775A JP2012173775A JP2011032097A JP2011032097A JP2012173775A JP 2012173775 A JP2012173775 A JP 2012173775A JP 2011032097 A JP2011032097 A JP 2011032097A JP 2011032097 A JP2011032097 A JP 2011032097A JP 2012173775 A JP2012173775 A JP 2012173775A
- Authority
- JP
- Japan
- Prior art keywords
- pump
- slab
- water
- water level
- tank
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims abstract description 209
- 238000004364 calculation method Methods 0.000 claims description 12
- 239000010865 sewage Substances 0.000 description 23
- 239000013598 vector Substances 0.000 description 13
- 238000000034 method Methods 0.000 description 11
- 238000003860 storage Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 6
- 238000005096 rolling process Methods 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 4
- 238000000605 extraction Methods 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 238000001816 cooling Methods 0.000 description 2
- 238000007418 data mining Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 238000005098 hot rolling Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000005086 pumping Methods 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000002351 wastewater Substances 0.000 description 1
- 238000004065 wastewater treatment Methods 0.000 description 1
Images




Landscapes
- Continuous Casting (AREA)
- Feedback Control In General (AREA)
Abstract
【解決手段】スラブに使用する水を循環制御するポンプ制御システムであって、投入されるスラブの特徴に関するスラブ情報を収集する上位計算機1と、スラブに使用した水を貯めるための上位タンク5と、循環路上に設けられ、上位タンク5に貯められた水を循環させるためのポンプ6と、上位計算機1により収集されたスラブ情報に基づいて、上位タンク5の水位を所定範囲内に保つようにポンプ6のモータ回転数と稼働時間とを算出する制御装置2と、制御装置2により算出されたモータ回転数と稼働時間とに基づいて、ポンプ6のモータ回転数を制御するインバータ3とを備える。
【選択図】図1
Description
2 制御装置
3 インバータ
4 電動機
5 上位タンク
6 ポンプ
7 下位タンク
8 ポンプ
9 貯水タンク
10 スラブ情報
Claims (5)
- スラブに使用する水を循環させる循環水設備においてポンプ制御を行うポンプ制御システムであって、
投入される前記スラブの特徴に関するスラブ情報を収集する情報収集部と、
前記スラブに使用した水を貯めるためのタンクと、
循環路上に設けられ、前記タンクに貯められた水を循環させるためのポンプと、
前記情報収集部により収集されたスラブ情報に基づいて、前記タンクの水位を所定範囲内に保つように前記ポンプのモータ回転数と稼働時間とを算出するモータ回転数算出部と、
前記モータ回転数算出部により算出されたモータ回転数と稼働時間とに基づいて、前記ポンプのモータ回転数と稼働時間とを制御する回転数制御部と、
を備えることを特徴とするポンプ制御システム。 - 前記情報収集部は、投入されるスラブの特徴に関するスラブ情報として、各スラブの厚み、長さ、幅、温度、投入タイミングのうち少なくとも1つを収集することを特徴とする請求項1記載のポンプ制御システム。
- 前記モータ回転数算出部は、過去の運転実績と前記情報収集部により収集されたスラブ情報とに基づいて前記タンクの水位変動を予測するとともに、予測した前記タンクの水位変動に基づいて、前記タンクの水位を所定範囲内に保ちつつ前記ポンプの消費電力が最小になるように前記ポンプのモータ回転数と稼働時間とを算出することを特徴とする請求項1又は請求項2記載のポンプ制御システム。
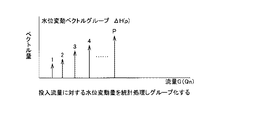
- 前記モータ回転数算出部は、過去の運転実績に基づいてスラブ情報と水位変動とを関連付けた複数のグループを予め生成し、前記情報収集部により収集されたスラブ情報が前記複数のグループのいずれに分類されるかに基づいて前記タンクの水位変動を予測することを特徴とする請求項3記載のポンプ制御システム。
- 前記モータ回転数算出部は、前記情報収集部により収集されたスラブ情報に基づいて省エネ運転領域を逸脱していると判断した場合に、前記ポンプのモータ回転数と稼働時間とを商用運転に切り替えることを特徴とする請求項1乃至請求項4のいずれか1項記載のポンプ制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011032097A JP5711995B2 (ja) | 2011-02-17 | 2011-02-17 | ポンプ制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011032097A JP5711995B2 (ja) | 2011-02-17 | 2011-02-17 | ポンプ制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012173775A true JP2012173775A (ja) | 2012-09-10 |
| JP5711995B2 JP5711995B2 (ja) | 2015-05-07 |
Family
ID=46976661
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011032097A Active JP5711995B2 (ja) | 2011-02-17 | 2011-02-17 | ポンプ制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5711995B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0968170A (ja) * | 1995-08-29 | 1997-03-11 | Hitachi Ltd | 下水処理場の汚水ポンプ制御装置 |
| JPH1137052A (ja) * | 1997-07-14 | 1999-02-09 | Ebara Corp | 送水装置のポンプ最適運転制御方法 |
| JPH11272336A (ja) * | 1998-03-26 | 1999-10-08 | Meidensha Corp | ポンプ場の処理水監視制御システム |
-
2011
- 2011-02-17 JP JP2011032097A patent/JP5711995B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0968170A (ja) * | 1995-08-29 | 1997-03-11 | Hitachi Ltd | 下水処理場の汚水ポンプ制御装置 |
| JPH1137052A (ja) * | 1997-07-14 | 1999-02-09 | Ebara Corp | 送水装置のポンプ最適運転制御方法 |
| JPH11272336A (ja) * | 1998-03-26 | 1999-10-08 | Meidensha Corp | ポンプ場の処理水監視制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5711995B2 (ja) | 2015-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102725078B (zh) | 轧制线上的注水控制装置、注水控制方法、注水控制程序 | |
| US11953867B2 (en) | Multi-pump control system | |
| AU2017309374A1 (en) | Hydrocyclone wear maintenance control system | |
| JP5684616B2 (ja) | デスケーリングシステム | |
| CN103240288B (zh) | 轧制除鳞装置的控制装置 | |
| JP6373416B2 (ja) | デスケーリングシステム及びその制御装置及び制御方法 | |
| JP5711995B2 (ja) | ポンプ制御システム | |
| Moghaddas-Zadeh et al. | ANN-based procedure to obtain the optimal design and operation of the compression chiller network–Energy, economic and environmental analysis | |
| Schlei-Peters et al. | Assessing combined water-energy-efficiency measures in the automotive industry | |
| EP3428454B1 (en) | Determination of a zero-flow characteristic curve of a pump in a multi-pump system | |
| Lu et al. | Water-level based discrete integrated dynamic control to regulate the flow for sewer-WWTP operation | |
| JP5263093B2 (ja) | 水処理設備用の制御装置 | |
| CN104593826A (zh) | 供料净化系统的负压值控制方法及装置 | |
| JP2007202361A (ja) | 電力デマンド監視システム | |
| JP2009047038A (ja) | 雨水ポンプの制御装置 | |
| KR20180076454A (ko) | 에너지 절감을 위한 하수 처리장에서의 에너지 제어 방법 | |
| JPH05265513A (ja) | 排水ポンプ所のポンプ運転台数制御方法および装置 | |
| CN117252406B (zh) | 面向下游取用水需求的补水调度方法、设备及介质 | |
| CN115869745B (zh) | 一种脱硫处理方法及装置 | |
| JP6439840B2 (ja) | 雪氷利用空調システム、雪氷冷房機、制御装置 | |
| CN102049481B (zh) | 基于二冷配水量的连铸机蒸汽排出风机节能优化控制方法 | |
| KR100902824B1 (ko) | 열연 강판 냉각설비의 절전방법 | |
| JP2001182665A (ja) | ポンプ運転方法、ポンプ制御装置及びその記録媒体 | |
| JP6431356B2 (ja) | 送油水冷式変圧器の冷却塔用冷却水の供給方法および装置 | |
| CN116624975A (zh) | 基于能耗目标和电流百分比的冷却侧设备台数控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140325 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140826 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150224 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150309 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5711995 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |