JP2012166789A - ポンプ装置 - Google Patents
ポンプ装置 Download PDFInfo
- Publication number
- JP2012166789A JP2012166789A JP2011026945A JP2011026945A JP2012166789A JP 2012166789 A JP2012166789 A JP 2012166789A JP 2011026945 A JP2011026945 A JP 2011026945A JP 2011026945 A JP2011026945 A JP 2011026945A JP 2012166789 A JP2012166789 A JP 2012166789A
- Authority
- JP
- Japan
- Prior art keywords
- oil supply
- pump
- oil
- pulley
- belt
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Loading And Unloading Of Fuel Tanks Or Ships (AREA)
- Details Of Reciprocating Pumps (AREA)
Abstract
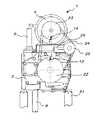
【解決手段】給油ポンプ3のプーリー22に第1の被検出器27を設け、給油ポンプ3に設けた第1の検出器13で、第1の被検出器27を検出することにより、給油ポンプ3の回転数を検出することが出来、制御装置に設けたポンプ監視手段給油ポンプ3がロックして、回転を停止しているか否か、駆動力を伝達するベルト24が緩んでいるか否かを、検出することが出来る。
【選択図】図2
Description
係る給油装置においては、給油モータのプーリーと給油ポンプのプーリーにベルトを掛けて、ベルト伝動方式にて、給油モータから給油ポンプに対して、必要な駆動力を伝達している。
テンションプーリーを取り付けるため、給油装置のハウジング本体に(テンションプーリーを取り付けるための)保持ブラケットを固定し、保持ブラケットに形成された長孔を貫通する調整ボルトにより、テンションプーリーを保持ブラケットに取り付けている。
例えば、貯油タンク内が錆等のゴミ等の異物が生じ、係る異物が油と共に給油ポンプへ送られて、給油ポンプのギヤに噛み込んで、給油ポンプがロックしてしまう場合が存在する。その様な場合には、ポンプ装置駆動用の給油モータが過負荷状態となり、過熱してしまう。
これに対して、従来の給油装置では、給油モータの電流値を監視するサーマルリレーを設けており、ポンプ装置駆動用の給油モータが過負荷状態になると、サーマルリレーが給油モータへの給電を停止している。
また、給油ポンプがロックしていなくても、経年劣化その他の原因でベルトの張力が減少して、プーリーに対してベルトがスリップすると、上述した様な摩擦が生じてしまう。それと共に、給油モータから給油ポンプへの駆動力の伝達効率が低下して、給油装置からの給液量(吐出量)が減少し、給油作業に長時間が必要になってしまうという問題も存在する。
ここで、上述したポンプ装置は、給油モータ(4)のプーリ(23)と給油ポンプ(3)のプーリ(22)にベルト(24:例えば、Vベルト)を掛け、給油モータ(4)の回転をベルト(24)を介して給油ポンプ(3)に伝達する様に構成されているのが好ましい。
そして、制御装置に設けたポンプ監視手段(15b)が、第1の検出器(13)の検出信号を受けて給油ポンプ(3)のプーリー(22)の回転数を演算することが出来る。そして、給油ポンプ(3)の回転数を把握することによって、給油ポンプ(3)が適正に駆動しているか否か、すなわち、給油ポンプ(3)がロックして、回転を停止しているか否かを監視することが出来る。
また、給油ポンプ(3)の回転数から、給油モータ(4)から給油ポンプ(3)に駆動力を伝達するベルト(24)が緩んでいるか否かを、検出することが出来る。
給油モータ(4)の回転数(Nm)が求まれば、給油モータ(4)のプーリー(23)と給油ポンプ(3)のプーリー(22)の減速比(S)は予め決まっているので、給油ポンプ(3)の理論回転数(Npc=Nm/S)を求めることが出来る。
そして、上述した第1の被検出器(27)及び第1の検出器(13)で検出した給油ポンプ(3)の実際の回転数(Np)から、給油モータ(4)から給油ポンプ(3)への駆動力の伝達効率(ε=Np/Npc=Np・S/Nm)を求めることが出来る。
この伝達効率(ε)は、プーリー(22、23)とベルト(24)がスリップしているか否かを判断するパラメータとして、極めて有効である。同様に、給油装置からの給液量(吐出量)が減少しているか否か、給油作業に長時間が必要な状態であるか否かを判断するパラメータとしても、伝達効率(ε)は有効である。
また、伝達効率(ε)が、しきい値よりも低ければ、給油装置からの給液量(吐出量)が減少し、給油作業に長時間が必要になってしまう恐れがあると判断出来るので、当該ベルト(24)を交換する等の処置を施して、伝達効率(ε)をしきい値以上にせしめ、給油装置からの給液量(吐出量)及び給油作業時間を適正化することが出来る。
また、本発明によれば、ポンプ装置がロックしていなくとも、プーリー(22、23)とベルト(24)がスリップしているか否か、給油装置からの給液量(吐出量)が減少しているか否か、給油作業に長時間が必要な状態であるか否かを、検出することが出来る。
そのため、重大な故障や異常が生じる以前の段階でポンプ装置の不具合を検出して、重大な故障や異常に対する処置を実行することが可能であり、保守性及び安全性が高く、給液作業効率を向上するポンプ装置が提供できるのである。
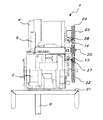
ポンプ装置1は、給油ポンプ3と、給油ポンプ3を駆動する給油モータ4を有している。
給油ポンプ3は、ハウジング5内に配設された給油管6に介装されている。給油ポンプ3吸引側の給油管6は、地下に設けられた貯油タンク7に接続されている。一方、給油ポンプ3吐出側の給油管6は、流量計8及び給油ホース9を介して、給油ノズル10に接続されている。
ここで、流量計8は、当該給油管6を流れる作動流体(油:ガソリン、オイル等)の流量を計測して、計測結果を流量信号として発信する。
ノズル掛け11にはノズルスイッチ12が設けられている。ノズルスイッチ12は、給油ノズル10をノズル掛け11に係止したことを検知して、給油ノズル10がノズル掛け11に係止された旨の検出信号を発信する機能を有している。それと共に、ノズルスイッチ12は、給油ノズル10をノズル掛け11から外したことを検知して、給油ノズル10をノズル掛け11から外した旨の検出信号を発信する機能を有している。
制御装置15からは、給油モータ4へ駆動信号が出力され、表示器16へ給油量表示信号が出力され、報知器17へ作動信号が出力される。
図2、図3において、ポンプ装置1はブラケット21を備え、ブラケット21には給油ポンプ3が取り付けられている。そして、給油ポンプ3の上方には、給油モータ4が取り付けられている。
給油ポンプ3はプーリー22を有し、給油モータ4はプーリー23を有し、プーリー22とプーリー23にはベルト24(例えば、Vベルト)が掛けられている。このベルト24に適度の張りを持たせるため、ベルト24はテンションプーリー25にも掛けられている。
ベルト24を掛けた状態では、プーリー22、プーリー23のV字状の溝はベルト24により隠れるが、図3では、ベルト24と共に、プーリー22、プーリー23のV字状の溝も表示している。
明確には図示されてはいないが、給油モータ4の電流値を監視するサーマルリレーが設けられている。図示しないサーマルリレーは、給油中にもかかわらず給油ポンプ3が停止(いわゆる「ロック」)してしまった場合には、給油モータ4に供給される電力を遮断する機能を有している。
図示しないサーマルリレーについては、公知、市販のものを適用可能である。
一方、給油ポンプ3には、第1の検出器として磁気センサ13が設けられており、給油モータ4には、第2の検出器として磁気センサ14が設けられている。磁気センサ13はプーリー22の磁石27が近接した旨を検知する機能を有しており、磁気センサ14はプーリー23の磁石28が近接した旨を検知する機能を有している。
プーリー22、23の回転を検出する機構としては、磁石27、28と磁気センサ13、14とによる構造に限定される訳ではない。例えば、反射部材と光学センサにより、プーリー22、23の回転を検出するが可能である。また、ロータリーエンコーダを用いても良い。すなわち、プーリー22、23の回転を検出する機構については、従来、公知の技術を適用することが出来る。
給油制御手段15aは、ノズルスイッチ12から、給油ノズル10をノズル掛け11から外した旨の信号(ノズル外し信号)を受信して、給油モータ4へ駆動信号を出力する。
そして、流量計8が発信した油(ガソリン、オイル等)の流量信号から給油量を演算して、演算された給油量の信号を表示器16へ発信して、表示器16に給油量を表示させる。
さらに給油制御手段15aは、ノズルスイッチ12から、給油ノズル10をノズル掛け11に係止した旨の信号(ノズル掛け信号)を受信して、給油モータ4へ駆動停止信号を発生する。或いは、給油モータ4への駆動信号の発信を停止する。
そしてポンプ監視手段15bは、給油ポンプ3の駆動状態が異常な場合に、報知器17を作動する機能を有している。「給油ポンプ3の駆動状態が異常な場合」については、後述する。
図6において、ステップST1では、給油ノズル10をノズル掛け11から外したか否かを判断する。給油ノズル10をノズル掛け11から外すと(ステップST1が「Y」)、ノズルスイッチ12からノズル外し信号が制御装置15へ出力される。そして給油制御手段15aは、表示器16に表示されていた前回の給油量の表示を帰零し、給油モータ4へ駆動信号を出力する(ステップST2)。そして、給油ノズル10から給油が開始される。
ステップST3において、流量計8から流量信号が入力されていなければ(ステップST3が「N」)、ステップST4をパスしてステップST5へ進む。
ノズルスイッチ12からノズル掛け信号が制御装置15へ入力された場合には(ステップST5が「Y」)、給油が完了したと判断して、給油モータ4への駆動信号を停止して、或いは、給油モータ4へ停止信号を出力して、給油ポンプ3を停止する(ステップST6)。
ノズルスイッチ12からノズル掛け信号が制御装置15へ入力されていない場合には(ステップST5が「N」)、ステップST3に戻って、ステップST3〜ST5を繰り返す(ステップST5が「N」のループ)。
図7の制御は、図6で説明した給油に関する制御に並行して実行される。
図7において、ステップST11では、給油モータ4が駆動しているか否かを判断する。換言すれば、ポンプ監視手段15bによって給油ポンプ3の駆動状態が異常であるか否かを監視する制御を実行する段階(給油モータ4が駆動している状態)であるか否かが、ステップST11で判断される。
給油モータ4が駆動しているか否かは、例えば、図示しない電流計により給油モータ4へ駆動電流が供給されているか否かを検出することで、判断することが出来る。或いは、上述したサーマルリレーによって、給油モータ4に供給される電力を遮断されているか否かを検出することによっても判断することが出来る。
その他、従来、公知の手法により、給油モータ4が駆動しているか否かを判断することが可能である。
図1〜図3を参照して説明した通り、給油ノズル10がノズル掛け11から外されて、ノズルスイッチ12からノズル外し信号が制御装置15へ入力している場合に、給油モータ4に対して駆動信号が伝達されて、給油モータ4は駆動する。
給油モータ4が駆動すると、その出力軸に取り付けられたプーリー23は回転し、プーリー23の回転はベルト24を介して給油ポンプ3のプーリー22へ伝達され、以って、給油ポンプ3が駆動される。
給油モータ4のプーリー23が回転していると、検出器14が断続的に被検出器28を検出し、その旨の検出信号が制御装置15へ伝達されることにより、制御装置15において、プーリー23及び給油モータ4の回転数を演算することが出来る。
給油ポンプ3の回転数がゼロである場合(ステップST13が「Y」)、給油モータ4が駆動しているにも拘らず給油ポンプ3が回転していないということなので、何らかの原因で給油ポンプ3がロックされてしまい、サーマルリレーにより供給電力が遮断されたと判断する。
そしてステップST14に進み、報知器17を作動して給油ポンプ3が停止していることを報知して、供給電力が遮断された状態の給油モータ4に対して必要な措置(例えば、停止用のボタン等の操作:図7ではステップST14において「給油モータ停止」と標記)を実行する。
そして、給油作業を行なっている作業者は、給油ポンプ3がロックされてしまい、サーマルリレーにより供給電力が遮断されたこと、すなわち故障が発生したという事実を把握することが出来るので、当該故障に対して必要な処置をして、給油作業を復旧すること、或いは、復旧に寄与することが出来る。
この際に、例えば、停止用ボタン等により給油モータ4を駆動しないための措置を実行するので、サーマルリレーによる供給電力遮断が解除された際に、給油モータ4及び給油ポンプ3が駆動してしまうことはない。
給油ポンプ3のプーリー22が回転していると、検出器13が断続的に被検出器27を検出し、その旨の検出信号が制御装置15へ伝達される。当該検出信号に基いて、制御装置15において、プーリー22及び給油ポンプ3の回転数を演算することが出来る。
ここで、ステップST15で求めた給油モータ4の回転数をNm、プーリー22、23の径比による減速比をS(例えば、1.5)とすれば、給油ポンプ3のプーリー22の理論回転数Npcは Npc=Nm/S なる数式で求まる。
ステップST12で求めた給油ポンプ3或いはプーリー22の実際の回転数をNpとすれば、ステップS16で求めたプーリー22の理論回転数Npcとプーリー22の実際の回転数Npより、プーリー22、23及びベルト24による伝達率εは、 ε=Np/Npc=Np・S/Nm なる数式で求まる。
なお、図7では、ステップST17において、プーリー22、23及びベルト24による伝達率εを、「ベルト伝達率」と標記している。
この「しきい値」については、ベルト24の仕様、給油装置の設計条件、使用状況、その他の条件に基いて、ケース・バイ・ケースで決定される。図示の実施形態では、例えば、0.85に設定されている。
報知器17を作動すれば、給油作業を行なっている作業者は、ポンプ装置1に何等かの不具合が発生していることを把握すること出来る。そのため、当該給油作業の終了後、ポンプ装置1が完全に故障する以前の段階で、例えば、ベルト24を交換する等の処置を講じることが出来る。その結果、給油作業の安全性が保証される。
また、給油モータ4を停止することにより、重大な故障が発生する以前の段階で給油を停止して、重大な異常事態の発生を未然に防止することが出来る。
そして、ステップST11に戻り(リターン)、ステップST11以下の制御を繰り返す。
例えば、ステップST15で検出器14の検知信号から演算される給油モータ4の回転数Nmが1500rpmであり、プーリー22、23の径比に基づく減速比Sが1.5であれば、ステップST16において、給油ポンプ3のプーリー22の理論回転数Npcは、1500÷1.5=1000rpmである。
ステップST12で検出器13の検出信号から演算される給油ポンプ3のプーリー22の実際の回転数Npを950rpmとすれば、プーリー22、23及びベルト24による伝達率εは 950÷1000=0.95 となる。
一方、伝達率εが0.85よりも小さい場合には、何らかの原因でベルト24が緩み、ベルト24がスリップして摩擦熱が発生している可能性が高く、給油ノズル10からの吐出量が低減し、給油時間が長時間化していると判断し、報知器17を作動して、給油モータを停止する。
給油ポンプ3が駆動している場合(ステップST13が「N」)には、第2段階として、ベルト24が緩んでいるか否かを判断する(ステップST15〜ST19)。
例えば貯油タンク7内が錆等のゴミにより汚れ、このゴミが油と共に給油ポンプ3へ送られて給油ポンプ3がロックされると、その旨が第1段階の制御で検出される。
それに対して、図示の実施形態では、ベルト24が緩んでいるか否かが第2段階でチェックされ、ベルト24が緩んで伝達効率εが低下すると、その旨が報知器17により報知される。
そのため、ベルト24が緩み、駆動力の伝達効率εが低下した状態で給油モータ4及び給油ポンプ3を駆動して、プーリー22、23に対してベルト24がスリップして、摩擦熱が発生して加熱してしまうことが防止される。また、駆動力の伝達効率εが低下した状態で給油を行なうことにより、給油ノズル10からの吐出量が低減して、給油時間が長時間化してしまうことも防止される。
この様に、図示の実施形態によれば、給油ポンプ3の異常を二段構えでチェックしているので、給油ポンプ3の異常を早期に発見することができて、給油作業の安全性及び作業効率の向上に役立つ。
2・・・給油装置
3・・・給油ポンプ
4・・・給油モータ
5・・・ハウジング
6・・・給油管
7・・・貯油タンク
8・・・流量計
9・・・給油ホース
10・・・給油ノズル
11・・・ノズル掛け
12・・・ノズルスイッチ
13、14・・・検出器(磁気センサ)
15・・・制御装置
15a・・・給油制御手段
15b・・・ポンプ監視手段
16・・・表示器
17・・・報知器
21・・・ブラケット
22、23・・・プーリー
24・・・ベルト
25・・・テンションプーリー
26・・・調整ネジ
27、28・・・被検出器(磁石)
Claims (3)
- 給油ポンプのプーリーに第1の被検出器を設け、第1の被検出器を検出する第1の検出器を給油ポンプに設けたことを特徴とするポンプ装置。
- 前記給油モータのプーリーに第2の被検出器を設け、第2の被検出器を検出する第2の検出器を給油モータに設ける請求項1のポンプ装置。
- 給油モータと給油ポンプの駆動力伝達効率が所定値よりも小さい値になった場合には給油モータを停止する機能を有する制御装置を有する請求項2のポンプ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011026945A JP5709088B2 (ja) | 2011-02-10 | 2011-02-10 | ポンプ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011026945A JP5709088B2 (ja) | 2011-02-10 | 2011-02-10 | ポンプ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012166789A true JP2012166789A (ja) | 2012-09-06 |
| JP5709088B2 JP5709088B2 (ja) | 2015-04-30 |
Family
ID=46971350
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011026945A Expired - Fee Related JP5709088B2 (ja) | 2011-02-10 | 2011-02-10 | ポンプ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5709088B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017094464A (ja) * | 2015-11-26 | 2017-06-01 | 株式会社モリタ環境テック | 切断処理装置及び切断処理装置の運転方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4946054A (ja) * | 1972-09-09 | 1974-05-02 | ||
| JPS55100430A (en) * | 1979-01-24 | 1980-07-31 | Hitachi Ltd | Protector for compressor driver |
| JPS6474358A (en) * | 1987-09-14 | 1989-03-20 | Tokyo Tatsuno Kk | Tension pulley |
| JPH0618937U (ja) * | 1992-08-10 | 1994-03-11 | 船井電機株式会社 | 電気機器の駆動ベルト張り具合検査装置 |
| JPH06156596A (ja) * | 1992-11-25 | 1994-06-03 | Tatsuno Co Ltd | 給油ユニット |
| JPH11190405A (ja) * | 1997-12-24 | 1999-07-13 | Mori Seiki Co Ltd | 動力伝達機構の異常検出装置 |
| JP2003184967A (ja) * | 2001-12-21 | 2003-07-03 | Toshiba Mach Co Ltd | タイミングベルトの歯飛び検知装置およびこれを用いた電動式射出成形機 |
-
2011
- 2011-02-10 JP JP2011026945A patent/JP5709088B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4946054A (ja) * | 1972-09-09 | 1974-05-02 | ||
| JPS55100430A (en) * | 1979-01-24 | 1980-07-31 | Hitachi Ltd | Protector for compressor driver |
| JPS6474358A (en) * | 1987-09-14 | 1989-03-20 | Tokyo Tatsuno Kk | Tension pulley |
| JPH0618937U (ja) * | 1992-08-10 | 1994-03-11 | 船井電機株式会社 | 電気機器の駆動ベルト張り具合検査装置 |
| JPH06156596A (ja) * | 1992-11-25 | 1994-06-03 | Tatsuno Co Ltd | 給油ユニット |
| JPH11190405A (ja) * | 1997-12-24 | 1999-07-13 | Mori Seiki Co Ltd | 動力伝達機構の異常検出装置 |
| JP2003184967A (ja) * | 2001-12-21 | 2003-07-03 | Toshiba Mach Co Ltd | タイミングベルトの歯飛び検知装置およびこれを用いた電動式射出成形機 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017094464A (ja) * | 2015-11-26 | 2017-06-01 | 株式会社モリタ環境テック | 切断処理装置及び切断処理装置の運転方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5709088B2 (ja) | 2015-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5694481B1 (ja) | 主軸とモータとの間の動力伝達部の異常を検出するモータ制御装置 | |
| JP2012071925A (ja) | コンベアのベルトスリップ検出方法、およびコンベアのベルトスリップ検出機構 | |
| KR102095851B1 (ko) | 모터 부하에 따라 정화 절차 또는 정지를 포함하는 펌프 장치를 제어하기 위한 방법 | |
| JP2013010175A (ja) | グラインダー用駆動装置及びそれを備えたグラインダー | |
| JP5709088B2 (ja) | ポンプ装置 | |
| WO2016063672A1 (ja) | 風力発電装置の異常監視装置 | |
| JP4981773B2 (ja) | 産業車両のクラッチ故障診断方法及び装置 | |
| JP2010206964A (ja) | 回転機械システム | |
| JP5941608B2 (ja) | ギヤモータ | |
| CN113894365B (zh) | 数控铣齿机主轴箱的在线故障检测系统 | |
| JP2000205140A (ja) | 圧縮機の予防保全方法及び装置 | |
| JP6130487B2 (ja) | ベルトスリップ診断システム | |
| KR20020023685A (ko) | 이상진단 자기제어 시스템을 갖춘 교반기 | |
| JP6499718B2 (ja) | シール部材の異常摩耗検知装置及び回転体装置 | |
| JP2014093932A (ja) | 過負荷保護装置付きギヤードモータ | |
| KR101879385B1 (ko) | 진동 감시 설비용 신호 처리 장치 | |
| JP2011088266A (ja) | ワイヤソー切断装置 | |
| CN104236746B (zh) | 用于马达的温度监控装置及监控方法 | |
| US10267325B2 (en) | Air cycle machine speed diagnostic | |
| TWI750511B (zh) | 氣體壓縮機 | |
| KR102382381B1 (ko) | 트랙터 기어펌프의 작동유 산화 감지 시스템 및 방법 | |
| JP2022076551A (ja) | 締付装置及び締付方法 | |
| JP2004160617A (ja) | 高圧クーラント供給装置 | |
| CN218876411U (zh) | 榨油机安全装置及榨油机 | |
| KR200268371Y1 (ko) | 이상진단 자기제어 시스템을 갖춘 교반기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140127 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140718 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140908 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5709088 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150222 |
|
| LAPS | Cancellation because of no payment of annual fees |