JP2012144198A - 車両の操舵装置 - Google Patents
車両の操舵装置 Download PDFInfo
- Publication number
- JP2012144198A JP2012144198A JP2011005350A JP2011005350A JP2012144198A JP 2012144198 A JP2012144198 A JP 2012144198A JP 2011005350 A JP2011005350 A JP 2011005350A JP 2011005350 A JP2011005350 A JP 2011005350A JP 2012144198 A JP2012144198 A JP 2012144198A
- Authority
- JP
- Japan
- Prior art keywords
- operating device
- hand
- operating
- transmission
- interlocking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Automatic Cycles, And Cycles In General (AREA)
- Non-Deflectable Wheels, Steering Of Trailers, Or Other Steering (AREA)
- Flexible Shafts (AREA)
- Friction Gearing (AREA)
Abstract
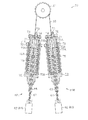
【解決手段】この操舵装置1には、右後輪15の回転速度および左後輪16の回転速度を変速比に応じた大きさに変更する無段変速装置50が設けられている。また操作装置60には、この無段変速装置50内のねじ機構を動作させて変速比を変更するドラム61が設けられている。また、右後輪15および左後輪16が直進するときの変速比を直進変速比とし、右後輪15および左後輪16が旋回するときの変速比を旋回変速比とし、変速比が直進変速比のときの無段変速装置50の動作状態を直進動作状態とし、変速比が旋回変速比のときの無段変速装置50の動作状態を旋回動作状態として、無段変速装置50の動作状態を旋回動作状態から直進動作状態に復帰させる復帰装置70が設けられている。
【選択図】図1
Description
(1)請求項1に記載の発明は、右駆動輪の回転速度および左駆動輪の回転速度を変速比に応じた大きさに変更する変速装置が設けられていること、この変速装置内の機構を動作させて前記変速比を変更する変更部材が設けられていること、ならびに、車両が直進するときの前記変速比を直進変速比とし、車両が旋回するときの前記変速比を旋回変速比とし、前記変速比が前記直進変速比のときの前記変速装置の動作状態を直進動作状態とし、前記変速比が前記旋回変速比のときの前記変速装置の動作状態を旋回動作状態として、前記変速装置の動作状態を前記旋回動作状態から前記直進動作状態に復帰させる復帰装置が設けられていることを要旨としている。
図1〜図5を参照して、本発明の一実施形態について説明する。本実施形態では、本発明の車両の操舵装置を三輪自転車の操舵装置として具体化した場合の一例を示している。なお、以下の説明に記載において、「前」、「後」、「左」および「右」の各方向は、三輪自転車の運転者を基準としている。
無段変速装置50においては、入力ディスク51の入力支持面51Aと出力ディスク53の出力支持面53Aとにより各ボール55が支持されている。各ボール55が回転するとき、入力支持面51Aに形成された湾曲面としての入力伝達面51B、および出力支持面53Aに形成された湾曲面としての出力伝達面53Bのそれぞれに対してボール55が摺動する。
ボール55の回転軸55Aの傾きが変更されたとき、入力伝達面51Bに対してボール55が接触する部分と回転軸55Aとの距離(以下、「第1作用半径R1」)、および出力伝達面53Bに対してボール55が接触する部分と回転軸55Aとの距離(以下、「第2作用半径R2」)が変更される。すなわち、無段変速装置50の変速比が変更される。
三輪自転車1においては、運転者によるペダル21の踏み込み動作により生じる動力が駆動スプロケット31、入力チェーン43、および入力スプロケット32を介して入力軸52に伝達される。また、ペダル21からの動力が入力チェーン43、右後輪スプロケット36、および右後車軸15Aを介して右後輪15に伝達される。
運転者は、三輪自転車1を右進させるとき、右手用の操舵レバー63の操作量を増大させる。このとき、ワイヤ65の移動量に応じてボール55の回転軸55Aが入力軸52および出力軸54に対して傾き、第2作用半径R2が第1作用半径R1よりも大きくなる。これにより、左後輪16の回転速度が右後輪15の回転速度よりも大きくなるため、この回転速度差により三輪自転車1が右進する。
三輪自転車1には、操作装置60として右手用操作装置60Rおよび左手用操作装置60Lが設けられている。各操作装置60R,60Lには、三輪自転車1の左右方向の中心線を基準として左右対称に構成となる点を除いては共通の構成が採用されているため、以下の説明では共通の符号を用いて各操作装置60R,60Lの構成を説明する。また、「操作装置60」と記載されている部分については、右手用操作装置60Rおよび左手用操作装置60Lの双方を示すものとする。
左手用操作装置60Lおよび右手用操作装置60Rの操舵レバー63の操作量が「0」のとき、ワイヤ65、クリップ73およびシリンダ74が初期の位置に保持される。また、ドラム61の回転位置が中立位置に保持される。また、無段変速装置50の動作状態が直進動作状態に保持される。
復帰装置70においては、ハウジング相対位置を変更することにより、クリップ73がシリンダ74に押し付けられていない状態においてのスプリング75の長さ(以下、「スプリング75の圧縮前長さ」)、すなわちスプリング75の予圧の大きさを変更することができる。
本実施形態の三輪自転車1によれば以下の効果が得られる。
(1)三輪自転車1の操舵装置2には、右後輪15および左後輪16の回転速度を変更する無段変速装置50と、無段変速装置50の変速比を変更するドラム61とが設けられている。
図6を参照して、本発明の第2実施形態について説明する。なお、本実施形態の三輪自転車1は第1実施形態の三輪自転車1に対して次の変更が加えられたものに相当する。すなわち、第1実施形態の復帰装置70においては、ドラム61と操舵レバー63との間にクリップ73、シリンダ74およびスプリング75の順でこれら構成要素が設けられている。これに対して本実施形態の復帰装置80においては、ドラム61と操舵レバー63との間にスプリング75、シリンダ74およびクリップ73の順でこれら構成要素が設けられている。
左手用操作装置60Lおよび右手用操作装置60Rの操舵レバー63の操作量が「0」のとき、ワイヤ65、クリップ83およびピストン84が初期の位置に保持される。また、ドラム61の回転位置が中立位置に保持される。また、無段変速装置50の動作状態が直進動作状態に保持される。
本実施形態の三輪自転車1によれば、第1実施形態の(1)〜(7)の効果に準じた効果が得られる。
なお、本発明の実施態様は上記各実施形態に限られるものではなく、例えば以下に示すように変更することもできる。また以下の各変形例は、上記各実施形態についてのみ適用されるものではなく、異なる変形例同士を互いに組み合わせて実施することもできる。
Claims (7)
- 右駆動輪の回転速度および左駆動輪の回転速度を変速比に応じた大きさに変更する変速装置が設けられていること、
この変速装置内の機構を動作させて前記変速比を変更する変更部材が設けられていること、
ならびに、車両が直進するときの前記変速比を直進変速比とし、車両が旋回するときの前記変速比を旋回変速比とし、前記変速比が前記直進変速比のときの前記変速装置の動作状態を直進動作状態とし、前記変速比が前記旋回変速比のときの前記変速装置の動作状態を旋回動作状態として、前記変速装置の動作状態を前記旋回動作状態から前記直進動作状態に復帰させる復帰装置が設けられていること
を特徴とする車両の操舵装置。 - 請求項1に記載の車両の操舵装置において、
当該操舵装置には、前記変更部材を駆動する操作装置が設けられていること、
この操作装置には、運転者により操作される操作部材と、この操作部材に入力された力により前記変更部材を駆動する接続部材とが設けられていること、
ならびに、前記変速比が前記旋回変速比から前記直進変速比に向けて変化する前記変更部材の動作を復帰変速動作として、前記変更部材を同復帰変速動作させる力が前記復帰装置から前記接続部材に付与されること
を特徴とする車両の操舵装置。 - 請求項2に記載の車両の操舵装置において、
前記復帰装置には、前記接続部材に対して移動する相対移動部材と、前記接続部材に連動する連動部材と、この連動部材の移動方向において前記相対移動部材に対して前記連動部材とは反対側に設けられた弾性部材とが設けられていること、
前記変更部材と前記操作部材との間においては前記連動部材および前記相対移動部材および前記弾性部材の順にこれらの構成要素が設けられていること、
前記変速比が前記直進変速比から前記旋回変速比に向けて変化する前記変更部材の動作を旋回変速動作とし、前記連動部材が前記相対移動部材に接近する方向を接近方向とし、前記連動部材が前記相対移動部材から離間する方向を離間方向として、前記操作部材の操作により前記接続部材が前記接近方向に移動するとき、前記変更部材が前記旋回変速動作すること、
ならびに、前記操作部材の操作により前記変速装置が前記旋回動作状態にあるとき、前記弾性部材の復元力により前記変更部材を前記復帰変速動作させる力が前記相対移動部材および前記連動部材を介して前記接続部材に付与されること
を特徴とする車両の操舵装置。 - 請求項3に記載の車両の操舵装置において、
前記操作装置として、右手用操作装置および左手用操作装置が設けられていること、
前記右手用操作装置の操作部材の操作により同操作装置の前記連動部材が前記接近方向に移動するとき、前記左手用操作装置において同操作装置の前記連動部材が前記離間方向に移動するとともに前記変更部材が前記旋回変速動作すること、
前記左手用操作装置の操作部材の操作により同操作装置の前記連動部材が前記接近方向に移動するとき、前記右手用操作装置において同操作装置の前記連動部材が前記離間方向に移動するとともに前記変更部材が前記旋回変速動作すること、
前記右手用操作装置の操作部材の操作により前記変速装置が前記旋回動作状態にあるとき、前記右手用操作装置の弾性部材の復元力により同操作装置において前記変更部材を前記復帰変速動作させる力が同操作装置の前記相対移動部材および前記連動部材を介して前記接続部材に付与されること、
ならびに、前記左手用操作装置の操作部材の操作により前記変速装置が前記旋回動作状態にあるとき、前記左手用操作装置の弾性部材の復元力により同操作装置において前記変更部材を前記復帰変速動作させる力が同操作装置の前記相対移動部材および前記連動部材を介して前記接続部材に付与されること
を特徴とする車両の操舵装置。 - 請求項2に記載の車両の操舵装置において、
前記操作装置として、右手用操作装置および左手用操作装置が設けられていること、
前記復帰装置には、前記接続部材に対して移動する相対移動部材と、前記接続部材に連動する連動部材と、この連動部材の移動方向において前記相対移動部材に対して前記連動部材とは反対側に設けられた弾性部材とが設けられていること、
前記変更部材と前記操作部材との間においては前記弾性部材および前記相対移動部材および前記連動部材の順にこれらの構成要素が設けられていること、
前記変速比が前記直進変速比から前記旋回変速比に向けて変化する前記変更部材の動作を旋回変速動作とし、前記連動部材が前記相対移動部材に接近する方向を接近方向とし、前記連動部材が前記相対移動部材から離間する方向を離間方向として、
前記右手用操作装置の操作部材の操作により同操作装置の前記連動部材が前記離間方向に移動するとき、前記左手用操作装置において同操作装置の前記連動部材が前記接近方向に移動するとともに前記変更部材が前記旋回変速動作すること、
前記左手用操作装置の操作部材の操作により同操作装置の前記連動部材が前記離間方向に移動するとき、前記右手用操作装置において同操作装置の前記連動部材が前記接近方向に移動するとともに前記変更部材が前記旋回変速動作すること、
前記右手用操作装置の操作部材の操作により前記変速装置が前記旋回動作状態にあるとき、前記左手用操作装置の弾性部材の復元力により同操作装置において前記変更部材を前記復帰変速動作させる力が同操作装置の前記相対移動部材および前記連動部材を介して前記接続部材に付与されること、
ならびに、前記左手用操作装置の操作部材の操作により前記変速装置が前記旋回動作状態にあるとき、前記右手用操作装置の弾性部材の復元力により同操作装置において前記変更部材を前記復帰変速動作させる力が同操作装置の前記相対移動部材および前記連動部材を介して前記接続部材に付与されること
を特徴とする車両の操舵装置。 - 請求項4または5に記載の車両の操舵装置において、
前記弾性部材においての前記連動部材側の端部である第1端部が前記相対移動部材に取り付けられていること、
前記復帰装置には、前記接近方向および前記離間方向において相対的な移動が可能な第1ハウジングおよび第2ハウジングが設けられていること、
ならびに、前記弾性部材においての前記連動部材側とは反対側の端部である第2端部が前記第2ハウジングに取り付けられていること
を特徴とする車両の操舵装置。 - 請求項2〜6のいずれか一項に記載の車両の操舵装置において、
前記操作部材には、前記接続部材に連結された操舵レバーと、前記右駆動輪および前記左駆動輪を制動するための制動レバーとが設けられていること
を特徴とする車両の操舵装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011005350A JP5707952B2 (ja) | 2011-01-13 | 2011-01-13 | 車両の操舵装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011005350A JP5707952B2 (ja) | 2011-01-13 | 2011-01-13 | 車両の操舵装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012144198A true JP2012144198A (ja) | 2012-08-02 |
| JP5707952B2 JP5707952B2 (ja) | 2015-04-30 |
Family
ID=46788233
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011005350A Expired - Fee Related JP5707952B2 (ja) | 2011-01-13 | 2011-01-13 | 車両の操舵装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5707952B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002037119A (ja) * | 2000-07-21 | 2002-02-06 | Yanmar Agricult Equip Co Ltd | 作業車 |
| JP2002250421A (ja) * | 2000-12-21 | 2002-09-06 | Kayseven Co Ltd | 無段変速機 |
-
2011
- 2011-01-13 JP JP2011005350A patent/JP5707952B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002037119A (ja) * | 2000-07-21 | 2002-02-06 | Yanmar Agricult Equip Co Ltd | 作業車 |
| JP2002250421A (ja) * | 2000-12-21 | 2002-09-06 | Kayseven Co Ltd | 無段変速機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5707952B2 (ja) | 2015-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5523636B1 (ja) | 電動アシスト自転車 | |
| US9994284B2 (en) | Bicycle assist unit | |
| JP6226115B2 (ja) | 電動アシスト自転車 | |
| GB2481230A (en) | Arm powered cycle | |
| CN106604863A (zh) | 电动助力自行车 | |
| JP2016165911A (ja) | 電動自転車 | |
| CN106414227A (zh) | 电动辅助自行车 | |
| JP6820244B2 (ja) | 自転車用変速機およびこれを備える自転車用アシストシステム | |
| JP2002525537A (ja) | 車両の変速及び操向用伝動装置 | |
| JP6214778B2 (ja) | オートバイ用後進装置 | |
| JP6118569B2 (ja) | 可変界磁モータ及び電動車両 | |
| JP5707952B2 (ja) | 車両の操舵装置 | |
| WO2012021023A2 (ko) | 핸들부를 앞뒤로 왕복시키는 동작으로 전륜올 구동하는 자전거 | |
| CN109154335A (zh) | 动力传递装置 | |
| EP2055623B1 (en) | Dual-mode wheel rotating apparatus | |
| CN113167378B (zh) | 用于具有反向驱动装置的机动车辆的传动单元以及包括所述传动单元的机动车辆 | |
| KR20030067016A (ko) | 자전거의 추진장치 | |
| JP6168783B2 (ja) | 自転車 | |
| JP2815854B2 (ja) | 車輌の前後進切換制限装置 | |
| JP2014008933A (ja) | 車両の操舵装置 | |
| TWI885055B (zh) | 人力驅動車用曲柄組件 | |
| KR101644747B1 (ko) | 외발자전거 | |
| TW202134110A (zh) | 自行車儲能助力系統 | |
| JPH04197103A (ja) | 乗用作業機 | |
| JP5896736B2 (ja) | シフト操作装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140701 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140829 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5707952 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |