JP2012135656A - Massage machine - Google Patents
Massage machine Download PDFInfo
- Publication number
- JP2012135656A JP2012135656A JP2012093401A JP2012093401A JP2012135656A JP 2012135656 A JP2012135656 A JP 2012135656A JP 2012093401 A JP2012093401 A JP 2012093401A JP 2012093401 A JP2012093401 A JP 2012093401A JP 2012135656 A JP2012135656 A JP 2012135656A
- Authority
- JP
- Japan
- Prior art keywords
- massage
- user
- neck
- shoulder
- treatment element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Massaging Devices (AREA)
- Finger-Pressure Massage (AREA)
Abstract
Description
本発明は、椅子型のマッサージ機に係り、詳しくは、首から左右の肩を連続的且つ満遍なくマッサージすることができるようにしたマッサージ機構を制御する制御部を備えているマッサージ機に関するものである。 The present invention relates to a chair-type massage machine, and more particularly, to a massage machine including a control unit that controls a massage mechanism that can continuously and evenly massage the left and right shoulders from the neck. .
従来、この種のマッサージ機としては、被施療者が腰掛ける座部の後部に背凭れ部を設けた椅子型のマッサージ機があり、例えば、背凭れ部に、施療子(揉み玉)が具備されたマッサージ機構等を設け、被施療者の背中をマッサージする構成のものが広く知られている。 Conventionally, as this type of massage machine, there is a chair-type massage machine in which a backrest portion is provided at the back of a seat portion on which a user sits down. For example, a treatment element (bump ball) is provided in the backrest portion. The thing of the structure which provides the massage mechanism etc. which massaged the back of a user is widely known.
かかるマッサージ機では、被施療者が腰掛けて背凭れ部に凭れかかった状態で、その背中に対して前記施療子を前後動、あるいは上下動させ、被施療者の背中に「揉み」や「叩き」と同様の刺激を与えてマッサージを行うことができるようになっている。 In such a massage machine, while the user sits down and leans on the backrest, the therapeutic element is moved back and forth or up and down with respect to the back, so that the patient's back is "stigmatized" or "struck" The massage can be performed with the same stimulus as "".
さらに最近では、このような形態のマッサージ機において、被施療者の肩部や首部に対してより大きなマッサージ効果が得られる構成のものが開示されている。 Furthermore, recently, a massage machine having such a configuration has been disclosed in which a greater massage effect is obtained on the shoulder and neck of the user.
例えば図11に示すように、背凭れ部に上下昇降可能及び前後進退可能に施療体(施療子)を配設し、背凭れ部に設定した施療体7の上下可動範囲内で、施療体7を前記背凭れ部から第1の進出限度位置L1まで前方進出可能としてマッサージを行なうよう構成したマッサージ機において、施療体7の上下可動範囲内に設けた特別施療領域では、第1の進出限度位置L1よりも前方に設定した第2の進出限度位置L2まで施療体7の前方進出を許可し、被施療者の肩部をその上方からマッサージできるように構成したものがある。 For example, as shown in FIG. 11, a treatment body (treatment element) is disposed on the backrest portion so that it can be moved up and down and back and forth, and the treatment body 7 is within a vertically movable range of the treatment body 7 set at the backrest portion. In the massage machine configured to perform massage from the backrest to the first advance limit position L1, the first advance limit position is provided in the special treatment region provided within the vertically movable range of the treatment body 7. There is a configuration in which the treatment body 7 is allowed to advance forward to a second advance limit position L2 set in front of L1, and the shoulder portion of the user can be massaged from above.
この前記施療体7により被施療者の肩部上方からマッサージする具体的な方法について、もみ玉7,7の位置を基準位置たる被施療者の肩位置から6mm程度上方まで移動させた後、該基準位置からもみ玉7,7を12mm程度降下させ、12rpm程度のもみ速度でもみ玉7,7の間を「狭い→広い→狭い→広い」に移動させる往復動作によってもみを行なった後、前記肩位置から6mm程度上方まで、20mm/s程度の速度でもみ玉7,7を上昇させる操作を所定回数繰り返えさせるものとしている。 With respect to a specific method of massaging from above the shoulder of the user by the treatment body 7, after moving the position of the kneading balls 7, 7 from the shoulder position of the treatment person as the reference position to about 6 mm above, The kneading balls 7 and 7 are lowered from the reference position by about 12 mm, and the kneading is performed by a reciprocating operation in which the kneading balls 7 and 7 are moved in a “narrow → wide → narrow → wide” manner even at a kneading speed of about 12 rpm. The operation of raising the balls 7 and 7 is repeated a predetermined number of times at a speed of about 20 mm / s from the shoulder position to about 6 mm.
さらに、被施療者の首部に対するマッサージの具体的な方法について、もみ玉7,7の間を普通に、もみ玉7,7の高さ位置を基準位置に、もみ玉7,7の前後位置を基準位置より所定寸法後方まで移動させた後、もみ玉7,7の間を「狭い」に移動させ、もみ玉7,7の高さ位置を基準位置から36mm程度上方へ移動させ、もみ玉7,7の間の幅を210°→「狭い」に移動させた後、もみ玉7,7の高さ位置を基準位置に移動させる。そして、もみ玉7,7の間の幅を普通に移動させた後、再びもみ玉7,7の高さ位置を基準位置から36mm程度上方へ移動させる操作を所定回数繰り返えさせるものとしている。 Furthermore, about the specific method of massage for the neck of the user, the distance between the kneading balls 7 and 7 is normally set, the height position of the kneading balls 7 and 7 is set as a reference position, and the front and rear positions of the kneading balls 7 and 7 are set. After moving from the reference position to the rear of the predetermined dimension, the distance between the kneading balls 7 and 7 is moved to “narrow”, and the height position of the kneading balls 7 and 7 is moved upward by about 36 mm from the reference position. , 7 is moved from 210 ° to “narrow”, and then the height position of the kneading balls 7, 7 is moved to the reference position. And after moving the width between the kneading balls 7 and 7 normally, the operation of moving the height position of the kneading balls 7 and 7 upward about 36 mm from the reference position is repeated a predetermined number of times. .
ところで、上記のような従来のマッサージ機は、被施療者の背中、肩部及び首部に応じてそれぞれの部位を個別集中的にマッサージするよう構成したものである。 By the way, the conventional massage machine as described above is configured to individually massage each part according to the back, shoulder, and neck of the user.
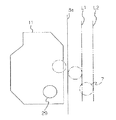
しかしながら、図10に示すように、東洋医学的には、特に首から肩にかけての部位に全身の「経絡」が通う要所とされており、これらの「経絡」に沿って多数の「ツボ」が存在するため、マッサージも首から肩にかかる「経絡」に沿って連続的にマッサージすることが望ましいのであるが、上記のような従来のマッサージ機の構成では、このような首から肩にかかる「経絡」に沿った連続的マッサージの実施には及ばないものであるため、この種の新たな構成のマッサージ機構における開発が課題となっていた。 However, as shown in FIG. 10, in oriental medicine, the “meridian” of the whole body passes especially from the neck to the shoulder, and a large number of “acupuncture points” along these “meridians”. Therefore, it is desirable to massage continuously along the “meridian” that extends from the neck to the shoulder. However, in the conventional massage machine configuration as described above, it is applied from the neck to the shoulder. Development of a massage mechanism with a new configuration of this kind has been an issue because it does not extend to the implementation of continuous massage along the “meridians”.
そこで、本発明は、上記問題点を解消する為に成されたものであり、「経絡」の通う首から肩を連続的に満遍なくマッサージすることができるマッサージ機構を備えたマッサージ機を提供する事を目的としてなされたものである。
Accordingly, the present invention has been made to solve the above-described problems, and provides a massage machine equipped with a massage mechanism that can continuously and uniformly massage a shoulder from a neck through which a “meridian” passes. It was made for the purpose.
すなわち、本発明のマッサージ機は、背凭れ部内に左右一対の施療子を有するマッサージ機構を備えたマッサージ機であって、該マッサージ機構には、このマッサージ機構自体を背凭れ部に対して前後の方向に移動させる前後動用駆動部と、背凭れ部の上下方向に沿ってこのマッサージ機構を昇降させる昇降用駆動部とを有しており、前記施療子が前方に突出しているときに被施療者の首部に当接する位置を首部当接基準位置とし、前記基準位置から被施療者の肩部に当接する肩部当接位置まで前記施療子を下降移動させる動作に並行して、その下降移動の移動量に比例した所定の関係を保ちつつ前記施療子を後方に移動させるようにマッサージ機構を制御する制御部を備えたものとしている。 That is, the massage machine of the present invention is a massage machine including a massage mechanism having a pair of left and right treatment elements in the backrest part, and the massage mechanism itself is placed in front of and behind the backrest part. A drive unit for back and forth movement that moves in a direction and a drive unit for raising and lowering the massage mechanism along the vertical direction of the backrest, and the user is treated when the treatment element protrudes forward In parallel with the operation of moving the treatment element downward from the reference position to the shoulder contact position that contacts the shoulder of the user, the position of contact with the neck of the patient is referred to as the neck contact reference position. A control unit for controlling the massage mechanism is provided so as to move the treatment element backward while maintaining a predetermined relationship proportional to the amount of movement.
また、本発明のマッサージ機は、前記マッサージ機構には被施療者の体形を検出するための体形検出部を備えており、該体形検出部によって算出した被施療者の首部当接基準位置から肩部当接位置の体形に沿って前記施療子を移動させるように制御するものとしている。 In the massage machine of the present invention, the massage mechanism includes a body shape detection unit for detecting the body shape of the user, and the shoulder from the neck contact reference position calculated by the body shape detection unit. The treatment element is controlled to move along the body shape of the part contact position.
さらに、本発明のマッサージ機は、前記左右一対の施療子におけるそれぞれの幅間隔を変化させながら被施療者の首部当接基準位置から肩部当接位置における前記施療子の移動動作をさせるように制御したものとしている。 Furthermore, the massage machine of the present invention moves the treatment element from the neck contact reference position of the user to the shoulder contact position while changing the width interval between the pair of left and right treatment elements. It is supposed to be controlled.
また、本発明のマッサージ機は、前記マッサージ機構に被施療者に対して揉みマッサージを行なう揉み用駆動部と、叩きマッサージを行なう叩き用駆動部とを備えており、揉み用駆動部及び\又は叩き用駆動部により被施療者にマッサージ動作をさせながら、被施療者の首部当接基準位置から肩部当接位置における前記施療子の移動動作を実行させるように制御したものとしている。 Further, the massage machine of the present invention comprises a massage drive unit for massaging the user to be massaged in the massage mechanism, and a drive unit for tapping to perform massage, and a massage drive unit and / or Control is performed such that the movement operation of the treatment element from the neck contact reference position of the user to the shoulder contact position is performed while the massage operation is performed on the user by the tapping drive unit.
さらに、本発明のマッサージ機は、被施療者の首部当接基準位置から肩部当接位置における前記施療子の移動動作を複数サイクルにおいて継続実行させるように制御したものとしている。
Furthermore, the massage machine of the present invention is controlled so that the movement operation of the treatment element from the neck contact reference position of the user to the shoulder contact position is continuously executed in a plurality of cycles.
よって、本発明のマッサージ機は、左右一対の施療子を有するマッサージ機構を背凭れ部内に備え、該マッサージ機構は、該マッサージ機構自体を背凭れ部に対して前後の方向に移動させる前後動用駆動部と、背凭れ部の上下方向に沿って該マッサージ機構を昇降させる昇降用駆動部とを有しており、前記施療子が前方に突出しているときに被施療者の首部に当接する位置を首部当接基準位置とし、前記基準位置から被施療者の肩部に当接する肩部当接位置まで前記施療子を下降移動させる動作に並行して、該下降移動の移動量に比例した所定の関係を保ちつつ前記施療子を後方に移動させるように前記マッサージ機構を制御する制御部を備えたものとしているため、「経絡」の通う首から左右の肩を連続的に満遍なくマッサージすることができ、「経絡」上のコリを効果的に解消できる。 Therefore, the massage machine of the present invention includes a massage mechanism having a pair of left and right treatment elements in the backrest part, and the massage mechanism moves forward and backward to move the massage mechanism itself in the front-rear direction with respect to the backrest part. And a drive unit for raising and lowering the massage mechanism along the vertical direction of the backrest, and the position where the treatment element abuts on the neck of the user when the treatment element protrudes forward In parallel with the operation of moving the treatment element downward from the reference position to the shoulder contact position that contacts the shoulder of the user, the neck contact reference position is set to a predetermined proportion proportional to the moving amount of the downward movement. Because it is equipped with a control unit that controls the massage mechanism so as to move the treatment element backward while maintaining the relationship, it is possible to massage the left and right shoulders continuously from the neck where the “meridian” passes. Can, it is possible to effectively eliminate the stiffness on the "meridians".
また、本発明のマッサージ機は、該マッサージ機構には被施療者の体形を検出するための体形検出部を備えており、該体形検出部によって算出した被施療者の首部当接基準位置から肩部当接位置の体形に沿って前記施療子を移動させるように制御したものとしているため、被施療者の体型個人差に対応した、より的確なマッサージを実施できる。 In the massage machine of the present invention, the massage mechanism includes a body shape detection unit for detecting the body shape of the user, and the shoulder from the neck contact reference position calculated by the body shape detection unit. Since the treatment element is controlled to move along the body shape of the part contact position, more accurate massage corresponding to the individual differences in the body shape of the user can be performed.
さらに、本発明のマッサージ機は、前記左右一対の施療子におけるそれぞれの幅間隔を変化させながら被施療者の首部当接基準位置から肩部当接位置における前記施療子の移動動作をさせるように制御したものとしているため、「引き揉み」「揉み上げ」など特殊なマッサージが実現でき、しかも、首から肩にかけて左右に広がる「経絡」に沿ったマッサージができるものとなる。 Furthermore, the massage machine of the present invention moves the treatment element from the neck contact reference position of the user to the shoulder contact position while changing the width interval between the pair of left and right treatment elements. Because it is controlled, special massages such as “squeezing” and “squeaking up” can be realized, and massage along the “meridian” that extends from the neck to the shoulder can be performed.
また、本発明のマッサージ機は、該マッサージ機構に被施療者に対して揉みマッサージを行なう揉み用駆動部と、叩きマッサージを行なう叩き用駆動部とを備えており、揉み用駆動部及び\又は叩き用駆動部により被施療者にマッサージ動作をさせながら、被施療者の首部当接基準位置から肩部当接位置における前記施療子の移動動作を実行させるように制御したものとしているため、より多彩なマッサージが実現できる。 In addition, the massage machine of the present invention includes a massage drive unit that performs massage massage for the user and a drive drive unit that performs massage, and the massage mechanism and / or Since it is controlled to perform the movement operation of the treatment element at the shoulder contact position from the neck contact reference position of the user while performing the massage operation to the user by the driving unit for tapping, more A variety of massages can be realized.
さらに、本発明のマッサージ機は、被施療者の首部当接基準位置から肩部当接位置における前記施療子の移動動作を複数サイクルにおいて継続実行させるように制御したものとしているため、「経絡」上のコリを十分にマッサージできる。
Furthermore, the massage machine of the present invention is controlled so that the movement operation of the treatment element from the neck contact reference position of the user to the shoulder contact position is continuously executed in a plurality of cycles. You can fully massage the upper stiffness.
以下に、本発明のマッサージ機を、図面に示す一実施形態に基づきこれを詳細に説明する。
図1は本発明のマッサージ機の一実施形態を示す斜視図であり、図2は本発明のマッサージ機の一実施形態を示す使用状態図であり、図3は本発明のマッサージ機の一実施形態を示す左側面断面説明図であり、図4は本発明のマッサージ機におけるマッサージ機構の一実施形態を示す斜視説明図であり、図5は本発明のマッサージ機におけるマッサージ機構の一実施形態を示す右側面断面説明図であり、図6は本発明のマッサージ機における背凭れ部内部でマッサージ機構が移動する状態の一実施形態を示す右側面断面説明図であり、図7は本発明のマッサージ機におけるマッサージ機構の施療子が首から肩を移動する状態の一実施形態を示す右側面説明図であり、図8は本発明のマッサージ機におけるマッサージ機構の施療子が肩から下方へ移動する状態の一実施形態を示す右側面説明図であり、図9は本発明のマッサージ機におけるマッサージ機構の施療子が人体の「経絡」に沿って移動する状態の一実施形態を示す説明図であり、図10は人体の首から肩及び背中にかけて存する「経絡」を示した図であり、図11は従来技術を示す図面である。
Below, the massage machine of this invention is demonstrated in detail based on one Embodiment shown on drawing.
FIG. 1 is a perspective view showing an embodiment of the massage machine of the present invention, FIG. 2 is a use state diagram showing an embodiment of the massage machine of the present invention, and FIG. 3 is an embodiment of the massage machine of the present invention. FIG. 4 is a perspective explanatory view showing an embodiment of a massage mechanism in the massage machine of the present invention, and FIG. 5 is an embodiment of the massage mechanism in the massage machine of the present invention. FIG. 6 is a right side cross-sectional explanatory view, and FIG. 6 is a right side cross-sectional explanatory view showing an embodiment of a state in which the massage mechanism moves inside the backrest part of the massage machine of the present invention. FIG. 7 is a massage according to the present invention. FIG. 8 is a right side explanatory view showing one embodiment of a state in which the massager of the massage mechanism in the machine moves from the neck to the shoulder, and FIG. 8 is a view of the massager of the massage mechanism in the massage machine of the present invention downward from the shoulder FIG. 9 is a right side explanatory view showing an embodiment of a moving state, and FIG. 9 is an explanatory view showing an embodiment of a state in which the treatment element of the massage mechanism in the massage machine of the present invention moves along the “meridian” of the human body. FIG. 10 is a view showing a “meridian” existing from the neck of the human body to the shoulder and back, and FIG. 11 is a view showing the prior art.
すなわち本発明のマッサージ機1aは、図1〜図3に示すように椅子型のものであり、被施療者の肩、腰、背中の接触部となる背凭れ部11aと、被施療者の尻の接触部となる座部12aを備え、該背凭れ部11aは、前記座部12aの後部にアクチュエータ等を備えたリクライニング機構2aによりリクライニング自在として取り付けたものとしている。
That is, the
また、前記座部12aの左右には肘掛け部14a・14aを設けると共に、該座部12aの前端部に出没自在とした足載せ部13aを備えている。
In addition,
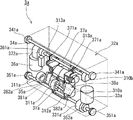
さらに、本発明のマッサージ機1aは、左右一対の施療子311a・311aを有するマッサージ機構3aを前記背凭れ部11a内に備えている。すなわち、該背凭れ部11aの内部に、左右一対の断面コ字状のガイドレール111aに沿って昇降可能となるように、該マッサージ機構3aを配設しており、該マッサージ機構3a内に設けた施療子駆動部31aの前端に該各施療子311aを配して、揉み、叩き、指圧、ローリング等多彩な形態のマッサージを被施療者に実施することを可能としている。
Furthermore, the
前記足載せ部13aは、必要に応じて内部に足部マッサージ機構(図示せず)を備えることができる。
The
また、本発明のマッサージ機1aは、制御部41aを介して該マッサージ機1a全体の操作をリモコン4aにて被施療者が行えるようにしている。該リモコン4aは、各種スイッチボタンを配した操作部(図示せず)と、液晶画面からなる表示部(図示せず)とを備えている。尚、制御部41aはリモコン4aに内装している。
In addition, the
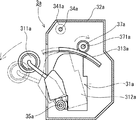
さらに、前記マッサージ機構3aは図4と図5に示すように、前記背凭れ部11aの上下方向に沿って該マッサージ機構3aを昇降させるモータを備えた昇降用駆動部33aとを有している。
Further, as shown in FIGS. 4 and 5, the
すなわち、略矩形箱型状の外部ケーシング32aの前方視右側下部に、前記昇降用駆動部33aを設けており、該昇降用駆動部33aはギヤ(図示せず)とウォーム(図示せず)とからなる昇降用ギアボックス部331aと噛合すると共に、該昇降用ギアボックス部331aは、該外部ケーシング32aの下部に回動自在に配設する左右幅方向に伸延させた昇降軸35aと噛合している。
That is, the raising / lowering
さらに、前記昇降軸35aの左右端部には、前記ガイドレール111aに固設するラック(図示せず)と夫々噛合する左右一対の各昇降用ピニオンギヤ351aを設けている。
Further, a pair of left and right lifting
また、前記外部ケーシング32aの上部に回動自在に配設する左右幅方向に伸延させたガイド軸34aを設けるとともに、該ガイド軸34aの左右端部には該ガイドレール111a内部にて回転自在である回転輪341aを設けている。
A
これらの構成により、前記昇降用駆動部33aの回転が、前記昇降用ギアボックス部331a、昇降軸35a、左右一対の各昇降用ピニオンギヤ351aに夫々伝達され、該各昇降用ピニオンギヤ351aは噛合している前記ラック(図示せず)上を回転走行することにより、前記マッサージ機構3aは、前記ガイドレール111aに沿って昇降可能となるのである。
With these configurations, the rotation of the elevating
尚、前記昇降軸35aには、前記昇降用駆動部33aによって該昇降軸35aが駆動(回動)した量を検出するためのロータリーエンコーダからなる昇降用駆動量検出手段352aを配設しており、該昇降用駆動量検出手段352aは、前記制御部41aに接続している。
The
さらに、前記マッサージ機構3aは図4と図5に示すように、該マッサージ機構3a自体を前記背凭れ部11aに対して前後の方向に移動させるモータを備えた前後動用駆動部36aを有している。
Further, as shown in FIGS. 4 and 5, the
すなわち、前記マッサージ機構3aに設けた前記施療子駆動部31aは、前記背凭れ部11aの表側(被施療者と接する側)に向けて進退移動可能となるよう構成されており、具体的には前記外部ケーシング32aの下部に左右幅方向に向けて伸延させた状態で配設した前記昇降軸35aの中央部に、該施療子駆動部31aのケーシングを構成する内部ケーシング312aを前後方向に向けて揺動自在に取付け、該昇降軸35aを揺動支点として該施療子駆動部31aが前後方向に向けて揺動できるようにしている。
That is, the treatment
また、前記外部ケーシング32aの前方視左側上部に、前記施療子駆動部31aを進退させるための前記前後動用駆動部36aを設け、該前後動用駆動部36aはギヤ(図示せず)とウォーム(図示せず)とからなる進退用ギアボックス部361aと噛合するとともに、該進退用ギアボックス部361aは、該外部ケーシング32aの上部に回動自在に配設する左右幅方向に伸延させた進退軸37aと噛合している。
The front /
さらに、前記進退軸37aの中途部に左右一対の各進退用ピニオンギヤ371aを取付ける一方、左右一対の該各進退用ピニオンギヤ371aと夫々噛合する左右一対の前記内部ケーシング312a上部に円弧状ラック313aを設けている。
Further, a pair of left and right advancing / retreating
これらの構成により、前記前後動用駆動部36aの回転が、前記進退用ギアボックス部361a、進退軸37a、左右一対の各進退用ピニオンギヤ371aに夫々伝達すると共に、左右一対の各該進退用ピニオンギヤ371aは噛合している前記円弧状ラック313aを移動させるので、前記施療子駆動部31aは、前記昇降軸35aを揺動支点として前後方向に向けて揺動し、該施療子駆動部31a、ひいては施療子311aが前後方向へ進退することになる。
With these configurations, the rotation of the forward /
尚、前記進退軸37aには、前記前後動用駆動部36aによって該進退軸37aが駆動(回動)された量を検出するためのロータリーエンコーダからなる進退用駆動量検出手段372aを配設しており、該進退用駆動量検出手段372aは、前記制御部41aに接続している。
The advancing / retreating
このように、本実施例に係るマッサージ機1aは、前記制御部41aによって前記昇降用駆動量検出手段352aと前記進退用駆動量検出手段372aの夫々の駆動量を検出しながら、前記昇降用駆動部33aと前後動用駆動部36aを駆動させることができるので、前記施療子311aの位置をきめ細かく制御することができ、また該昇降用駆動部33aと前後動用駆動部36aの駆動を適宜組み合わせることによって、被施療者の体の肩、背中、腰等を多彩なモードでマッサージすることができる。
As described above, the
すなわち、前記制御部41aによって昇降用駆動部33aを駆動させると、昇降軸35aが回動し、それに伴って左右一対の前記各昇降用ピニオンギヤ351aが左右一対の前記ガイドレール111aに固設するラック(図示せず)に沿って夫々走行し、前記マッサージ機構3aが前記背凭れ部11aに沿って昇降移動する。その際に、該制御部41aは、ロータリーエンコーダからなる前記昇降用駆動量検出手段352aで昇降軸35aの回動量を検出して、該マッサージ機構3aの昇降量を検出している。この動作によりローリングマッサージが可能となる。
That is, when the lifting
また、前記制御部41aによって前後動用駆動部36aを駆動すると、前記進退軸37aが回動し、それに伴って左右一対の前記各進退用ピニオンギヤ371aの回転が前記内部ケーシング312a上部に取り付けている左右一対の前記円弧状ラック313aに伝達することにより、左右一対の該円弧状ラック313aが移動して、前記施療子駆動部31aが前後方向に進退移動するとともに、前記施療子311aが前後方向に進退移動する。その際に、該制御部41aは、ロータリーエンコーダからなる前記進退用駆動量検出手段372aで前記進退軸37aの回動量を検出して、該施療子駆動部31aの進退量を検出している。この動作により指圧マッサージが可能となる。
Further, when the
上記の基本となる各作動を組み合わせることによって、被施療者の体の肩、背中、腰等を、多彩なモードでマッサージすることができ、しかも、前記施療子311aの進退量を簡単な構成で従来よりも大きくすることができるので、マッサージ力を多段階に調整することが可能である。
By combining the above basic operations, the shoulder, back, waist, etc. of the body of the user can be massaged in various modes, and the amount of advancement / retraction of the
また、本発明のマッサージ機1aは、図6に示すように上記のように構成することにより前記マッサージ機構3aに被施療者の体形を検出するための体形検出部411aを備えている。すなわち、前記昇降用駆動部33aの駆動量を前記昇降用駆動量検出手段352aから検出しつつ前記制御部41aにより制御されるとともに、前記前後動用駆動部36aの駆動量を前記進退用駆動量検出手段372aから検出しつつ同制御部41aにより制御されることになるので、前記施療子311aの進退量を該進退用駆動量検出手段372aにより検出する複数の進退量検出ポイントを前記マッサージ機構3aの昇降範囲において所定間隔毎に設け、該進退量検出ポイント毎に該マッサージ機構3aを昇降しつつ、該進退量検出ポイント毎に前記施療子311aを被施療者背部に向けて移動させて、該施療子311aの進退量を該進退用駆動量検出手段372aから検出することにより、複数の各該進退量検出ポイントから検出された該施療子311aの進退量に基づいて、被施療者の側方向から見た背筋曲線(首部から腰部)の状態及び肩位置を検出するようにしているのである。尚、該背筋曲線を前記リモコン4aの液晶画面からなる表示部(図示せず)に表示してもよい。
Moreover, the
さらに、前記背凭れ部11aのリクライニング機構2aには、該背凭れ部11aの傾斜角度を検出するリクライニング角度検出センサ(図示せず)を設けて、前記肩位置の自動補正を可能としてもよく、例えば該リクライニング角度に応じた所定量の偏差を補正するようにすることができる。すなわち、実験的に得られた標準的な偏差を加えることができる。
Further, the
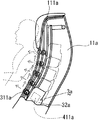
また、本発明のマッサージ機1aは、図7に示すように前記施療子311aが前方に突出しているときに被施療者の首部に当接する位置を首部当接基準位置f1とし、前記基準位置f1から被施療者の肩部に当接する肩部当接位置f2まで前記施療子311aを下降移動させる動作に並行して、該下降移動の移動量に比例した所定の関係を保ちつつ前記施療子311aを後方に移動させるように前記マッサージ機構3aを制御する前記制御部41aを備えたことを特徴とするものである。
Further, in the
すなわち、まず前記肩部当接位置f2は、前述した背筋曲線の検出と同時に検出される肩位置として設定される。同時に、前記首部当接基準位置f1は、設定された肩部当接位置f2より上方へ所定間隔を存して設定される。尚、首部当接基準位置f1と肩部当接位置f2との所定間隔は、肩部当接位置f2の検出設定により標準体型を割り出し、該標準体型に応じた肩上部から頚椎上部までの距離となるようにしてもよい。 That is, first, the shoulder contact position f2 is set as a shoulder position that is detected simultaneously with the detection of the above-described back muscle curve. At the same time, the neck contact reference position f1 is set at a predetermined interval above the set shoulder contact position f2. The predetermined interval between the neck contact reference position f1 and the shoulder contact position f2 is determined by determining the standard body shape based on the detection setting of the shoulder contact position f2, and the distance from the upper shoulder portion to the upper cervical spine according to the standard body shape. You may make it become.
この時、図7に示すように、前記首部当接基準位置f1の方が前記肩部当接位置f2よりも前記施療子311aが前方に突出した状態となる。
At this time, as shown in FIG. 7, the
よって、前記首部当接基準位置f1から前記肩部当接位置f2まで前記施療子311aを下降移動させる場合、この動作に伴って該下降移動の移動量に比例した所定の関係を保ちつつ前記施療子311aを後方に移動させるよう前記制御部41aにより制御しているのである。
Therefore, when the
また、本発明のマッサージ機1aは、前述のように前記マッサージ機構3aにおいて被施療者の体形を検出するための前記体形検出部411aを備えているので、該体形検出部411aによって算出した被施療者の前記首部当接基準位置f1から前記肩部当接位置f2の体形に沿って前記施療子311aを移動させるように制御してもよい。
Moreover, since the
さらに、図9に示すように前記左右一対の施療子311a・311aにおけるそれぞれの幅間隔を変化させながら被施療者の前記首部当接基準位置f1から前記肩部当接位置f2における前記施療子311a・311aの移動動作をさせるように制御できる。
Further, as shown in FIG. 9, the
前記左右一対の施療子311a・311aの相互の幅間隔を変化する構成として、図4に示すように、幅間隔変化機構38aを設けている。すなわち、該幅間隔変化機構38aとして、前記施療子駆動部31a内に幅方向に延設する螺軸381aを設けると共に、該螺軸381aの左右両側にそれぞれ移動体382a・382aを螺合させ、これら各移動体382aにそれぞれ各施療子311aを取り付けている。尚、前記螺軸381aは左右両側がそれぞれ対称となるネジ溝を設けたものである。
As shown in FIG. 4, a width
よって、前記螺軸381aをモータ(図示せず)により回転させると、左右に螺合する前記移動体382a・382aが相互接離することになり、前記左右一対の施療子311a・311aもこれに伴って相互の幅間隔を変化・調節することが可能となる。
Therefore, when the
例えば、前記首部当接基準位置f1から被施療者の肩部に当接する前記肩部当接位置f2まで前記左右一対の施療子311a・311aを下降移動させる動作に並行して、該下降移動の移動量に比例した所定の関係を保ちつつ前記施療子311aを後方に移動させつつ、左右一対の施療子311a・311aにおけるそれぞれの幅間隔を変化させると、「引き揉み」を実施することができる。
For example, in parallel with the operation of moving the pair of left and
または、逆に前記肩部当接位置f2から前記首部当接基準位置f1まで前記左右一対の施療子311a・311aを昇降移動及び後方移動しつつ、左右一対の施療子311a・311aにおけるそれぞれの幅間隔を変化させると、「揉み上げ」を実施することができる。
Or, conversely, while moving the pair of left and
さらに、図9に示すような被施療者の「経絡」に沿って、前記施療子311aによるマッサージがなされるよう、昇降する前記左右一対の施療子311a・311aの相互間隔を変化させられる。
Further, along the “meridian” of the user as shown in FIG. 9, the mutual distance between the pair of left and
そのために、前記制御部41aの記憶手段42aに身長毎の「経絡」を記憶しておき、その記憶データに基づいて前記左右一対の施療子311a・311aが移動しつつマッサージすることができるようにしてもよい。尚、被施療者の身長は前記肩部当接位置f2の検出されるデータから割り出されるものとすることができる。
For this purpose, the meridian for each height is stored in the storage means 42a of the
また、本発明のマッサージ機1aは、図4に示すように前記マッサージ機構3aについて、被施療者に対して揉みマッサージを行なうモータを備えた揉み用駆動部310aと、叩きマッサージを行なうモータを備えた叩き用駆動部310bとを備えており、揉み用駆動部310a及び\又は叩き用駆動部310bにより被施療者にマッサージ動作をさせながら、図9に示すような前記首部当接基準位置f1から前記肩部当接位置f2における前記各施療子311aの移動動作を実行させるように制御したものとしている。
Further, as shown in FIG. 4, the
さらに、図9に示すような前記首部当接基準位置f1から肩部当接位置f2における前記各施療子311aの移動動作を、複数サイクルにおいて継続実行させるように前記制御部41aにより制御してもよい。
Furthermore, even if the
図8に示すのは、前記左右一対の施療子311a・311aを前記肩部当接位置f2より下方及び後方へ所定距離移動させて、「肩引き」マッサージを実施する形態のものである。この肩部当接位置f2から所定距離移動した位置における前記各施療子311aの移動動作は、基本的に前述した前記首部当接基準位置f1から肩部当接位置f2における移動動作と同様となるので説明を省略する。
FIG. 8 shows an embodiment in which a “shouldering” massage is performed by moving the pair of left and
尚、本実施例では、前記背凭れ部11aで被施療者の身体を支持する、いわゆる椅子式のマッサージ機を例として説明しているが、これに限らず、ベッドで被施療者の身体を支持するベッド式のマッサージ機でもよい。
In addition, although the present Example demonstrates as an example what is called a chair type massage machine which supports a to-be-treated person's body by the said
1a マッサージ機
11a 背凭れ部
111a ガイドレール
12a 座部
121a 着座検出手段
13a 足載せ部
14a 肘掛け部
2a リクライニング機構
3a マッサージ機構
31a 施療子駆動部
310a 揉み用駆動部
310b 叩き用駆動部
311a 施療子
312a 内部ケーシング
313a 円弧状ラック
32a 外部ケーシング
33a 昇降用駆動部
331a 昇降用ギアボックス部
34a ガイド軸
341a 回転輪
35a 昇降軸
351a 昇降用ピニオンギヤ
352a 昇降用駆動量検出手段
36a 前後動用駆動部
361a 進退用ギアボックス部
37a 進退軸
371a 進退用ピニオンギヤ
372a 進退用駆動量検出手段
38a 幅間隔変化機構
381a 螺軸
382a 移動体
4a リモコン
41a 制御部
411a 体形検出部
42a 記憶手段
f1 首部当接基準位置
f2 肩部当接位置
DESCRIPTION OF
Claims (5)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012093401A JP2012135656A (en) | 2012-04-16 | 2012-04-16 | Massage machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012093401A JP2012135656A (en) | 2012-04-16 | 2012-04-16 | Massage machine |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007163724A Division JP5599133B2 (en) | 2007-06-21 | 2007-06-21 | Massage machine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012135656A true JP2012135656A (en) | 2012-07-19 |
Family
ID=46673582
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012093401A Pending JP2012135656A (en) | 2012-04-16 | 2012-04-16 | Massage machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012135656A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104287956A (en) * | 2014-10-21 | 2015-01-21 | 西安电子科技大学 | Neck massager |
| CN106943284A (en) * | 2017-03-30 | 2017-07-14 | 张金柱 | A kind of cervical-vertebra curing instrument and operating method |
| CN108310635A (en) * | 2018-02-11 | 2018-07-24 | 重庆医科大学附属永川医院 | A kind of cervical vertebra massage apparatus |
| US10966901B2 (en) | 2017-03-02 | 2021-04-06 | Fuji Medical Instruments Mfg. Co., Ltd. | Massage system |
| TWI840493B (en) * | 2019-01-24 | 2024-05-01 | 日商大東電機工業股份有限公司 | Shoulder massage institution |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3128260B2 (en) * | 1991-05-22 | 2001-01-29 | 三洋電機株式会社 | Chair type massage machine |
| JP2001104425A (en) * | 1999-07-28 | 2001-04-17 | Omron Corp | Massaging apparatus |
-
2012
- 2012-04-16 JP JP2012093401A patent/JP2012135656A/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3128260B2 (en) * | 1991-05-22 | 2001-01-29 | 三洋電機株式会社 | Chair type massage machine |
| JP2001104425A (en) * | 1999-07-28 | 2001-04-17 | Omron Corp | Massaging apparatus |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104287956A (en) * | 2014-10-21 | 2015-01-21 | 西安电子科技大学 | Neck massager |
| US10966901B2 (en) | 2017-03-02 | 2021-04-06 | Fuji Medical Instruments Mfg. Co., Ltd. | Massage system |
| CN106943284A (en) * | 2017-03-30 | 2017-07-14 | 张金柱 | A kind of cervical-vertebra curing instrument and operating method |
| CN108310635A (en) * | 2018-02-11 | 2018-07-24 | 重庆医科大学附属永川医院 | A kind of cervical vertebra massage apparatus |
| TWI840493B (en) * | 2019-01-24 | 2024-05-01 | 日商大東電機工業股份有限公司 | Shoulder massage institution |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5599133B2 (en) | Massage machine | |
| JP2007029481A (en) | Massage machine | |
| JP2012135656A (en) | Massage machine | |
| TWI731938B (en) | Massage machine and control method of massage machine | |
| TWI604838B (en) | Massage machine | |
| CN110478218A (en) | A kind of novel therapeutic device of internal medicine migraine | |
| WO2014171466A2 (en) | Massager | |
| JP2007143779A (en) | Massaging machine | |
| JP2009240688A (en) | Massage machine | |
| JP4723121B2 (en) | Massage machine | |
| TWI632906B (en) | Massage machine | |
| TWI384979B (en) | Massage machine | |
| JP4663915B2 (en) | Massage machine | |
| JP2008302059A (en) | Massage machine | |
| JP4938183B2 (en) | Massage machine | |
| JP4563570B2 (en) | Massage machine | |
| JP5268560B2 (en) | Chair massage machine | |
| JP4404293B2 (en) | Treatment machine | |
| JP2003339810A (en) | Massage machine | |
| JP2003024400A (en) | Massage machine | |
| JP4723122B2 (en) | Massage machine | |
| JP4723120B2 (en) | Massage machine | |
| CN106618989A (en) | Waist and hip massage device | |
| JP5348857B2 (en) | Grudge balls | |
| JP5806522B2 (en) | Massage machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130521 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130722 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140204 |