JP2012130178A - 電動ポンプ用ブラシレスモータの制御装置 - Google Patents
電動ポンプ用ブラシレスモータの制御装置 Download PDFInfo
- Publication number
- JP2012130178A JP2012130178A JP2010280367A JP2010280367A JP2012130178A JP 2012130178 A JP2012130178 A JP 2012130178A JP 2010280367 A JP2010280367 A JP 2010280367A JP 2010280367 A JP2010280367 A JP 2010280367A JP 2012130178 A JP2012130178 A JP 2012130178A
- Authority
- JP
- Japan
- Prior art keywords
- oil temperature
- brushless motor
- motor
- electric pump
- duty ratio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Abstract
【解決手段】ECU4は、モータコイル12u,12v,12wに三相の駆動電力を通電する駆動回路21と、モータコイル12u,12v,12wへの通電パターンを所定の切り替え周期で順次切り替えることによりブラシレスモータ3を起動させるマイコン22とを備えた。そして、ECU4は、電動ポンプ1が供給する作動油の油温θを検出する油温センサ51を備え、マイコン22は、油温θが高くなるほど通電パターンの切り替え周期を早くするようにした。
【選択図】図1
Description
図1に示す電動ポンプ1は、一時停車時にエンジンを自動停止する所謂アイドルストップ機能を備えた車両に搭載され、トランスミッション等に油圧を供給する。同図に示すように、電動ポンプ1は、ポンプ本体2を駆動するブラシレスモータ3と、ブラシレスモータ3の作動を制御する制御装置としてのECU4とを備えている。
ブラシレスモータ3の停止時には誘起電圧が発生しないため、マイコン22は、ロータ11の回転位置にかかわらず、通電パターンを予め定められた順序で切り替えること(強制転流)により、ロータ11を強制的に回転させてブラシレスモータ3を起動させる。そして、ロータ11の回転速度が上昇し、各モータコイル12u,12v,12wに生じる誘起電圧が安定することで、所定時間継続して回転位置信号S1〜S3の組み合わせが上記した順序で規則的に変化すると、これら回転位置信号S1〜S3及び電流指令値I*に基づいてブラシレスモータ3を駆動(センサレス駆動)する。なお、モータ制御信号生成部28には、回転位置信号S1〜S3が規則的に変化する順序を記憶したメモリ42及びタイマ43が設けられている。すなわち、本実施形態では、マイコン22が起動手段に相当する。
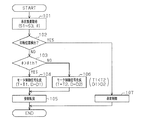
マイコン22は、センサ値として回転位置信号S1〜S3及び油温θを取得すると(ステップ101)、所定時間継続して回転位置信号S1〜S3が規則的に変化し、ロータ11の回転位置を検出できるようになったか否かを判定する(ステップ102)。続いて、ロータ11の回転位置を検出できるようになっていない場合には(ステップ102:NO)には、油温θが閾値θthよりも大きいか否かを判定する(ステップ103)。そして、油温θが閾値θthよりも大きい場合には(ステップ103:YES)、切り替え周期Tを第1の切り替え周期T1とするとともにデューティ比Dを第1のデューティ比D1とするモータ制御信号を生成し(ステップ104)、強制転流を行う(ステップ105)。
(1)ECU4は、電動ポンプ1が供給する作動油の油温θを検出する油温センサ51を備えた。そして、マイコン22は、油温θが閾値θthよりも大きい場合には、通電パターンの切り替え周期Tを第1の切り替え周期T1とし、油温θが閾値θth以下の場合には、切り替え周期Tを第1の切り替え周期T1よりも遅い第2の切り替え周期T2とするようにした。
・上記実施形態では、油温θと閾値θthとの比較に基づいて通電パターンの切り替え周期Tを変更したが、これに限らず、例えば図6(a)に示すような油温θと切り替え周期Tとの関係を示したマップをモータ制御信号生成部28に設け、同マップを参照することにより油温θに応じた切り替え周期Tを演算するようにしてもよい。また、例えば図6(b)に示すような油温θとデューティ比Dとの関係を示したマップをモータ制御信号生成部28に設け、同マップを参照することにより油温θに応じたデューティ比Dを演算するようにしてもよい。この構成では、作動油の油温θ、すなわちブラシレスモータ3の負荷に応じて高精度に通電パターンの切り替え周期T及びデューティ比Dを演算することができ、効果的に消費電流の増加や脱調を抑制することができる。
・上記実施形態では、作動油の油温θを油温センサ51により直接検出するようにしたが、これに限らず、例えばマイコン22が設けられる基板温度を検出し、同基板温度に基づいて油温θを推定するようにしてもよい。
次に、上記実施形態及び別例から把握できる技術的思想について、それらの効果とともに以下に追記する。
Claims (2)
- 電動ポンプを駆動するブラシレスモータのモータコイルに三相の駆動電力を通電する駆動回路と、前記モータコイルへの複数の通電パターンを予め定められた順序で切り替えることによりロータを強制的に回転させて前記ブラシレスモータを起動させる起動手段とを備えた電動ポンプ用ブラシレスモータの制御装置であって、
前記電動ポンプが供給する作動油の油温を検出する油温検出手段を備え、
前記起動手段は、前記油温が高くなるほど前記通電パターンの切り替え周期を早くすることを特徴とする電動ポンプ用ブラシレスモータの制御装置。 - 請求項1に記載の電動ポンプ用ブラシレスモータの制御装置において、
前記ブラシレスモータは、前記駆動回路を構成するスイッチング素子のデューティ比の変更を通じてモータ出力が制御されるものであって、
前記起動手段は、前記油温が高いほど前記デューティ比を高くすることを特徴とする電動ポンプ用ブラシレスモータの制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010280367A JP5724353B2 (ja) | 2010-12-16 | 2010-12-16 | 電動ポンプ用ブラシレスモータの制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010280367A JP5724353B2 (ja) | 2010-12-16 | 2010-12-16 | 電動ポンプ用ブラシレスモータの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012130178A true JP2012130178A (ja) | 2012-07-05 |
| JP5724353B2 JP5724353B2 (ja) | 2015-05-27 |
Family
ID=46646589
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010280367A Expired - Fee Related JP5724353B2 (ja) | 2010-12-16 | 2010-12-16 | 電動ポンプ用ブラシレスモータの制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5724353B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014087213A (ja) * | 2012-10-25 | 2014-05-12 | Kubota Corp | モータ制御装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005110345A (ja) * | 2003-09-29 | 2005-04-21 | Aisin Seiki Co Ltd | 油圧ポンプ駆動用センサレスブラシレスdcモータの起動制御方法及び制御装置 |
| JP2008238882A (ja) * | 2007-03-26 | 2008-10-09 | Jtekt Corp | 油圧パワーステアリング装置 |
| JP2009247082A (ja) * | 2008-03-31 | 2009-10-22 | Hitachi Ltd | モータ制御装置、空気圧縮機、空気調和機、乗客コンベアの制御装置及びコンベアの制御装置 |
-
2010
- 2010-12-16 JP JP2010280367A patent/JP5724353B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005110345A (ja) * | 2003-09-29 | 2005-04-21 | Aisin Seiki Co Ltd | 油圧ポンプ駆動用センサレスブラシレスdcモータの起動制御方法及び制御装置 |
| JP2008238882A (ja) * | 2007-03-26 | 2008-10-09 | Jtekt Corp | 油圧パワーステアリング装置 |
| JP2009247082A (ja) * | 2008-03-31 | 2009-10-22 | Hitachi Ltd | モータ制御装置、空気圧縮機、空気調和機、乗客コンベアの制御装置及びコンベアの制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014087213A (ja) * | 2012-10-25 | 2014-05-12 | Kubota Corp | モータ制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5724353B2 (ja) | 2015-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20120306416A1 (en) | Brushless motor drive device and drive method | |
| JP5787054B2 (ja) | 電動ポンプ装置 | |
| JP2008141828A (ja) | モータ駆動装置及びモータ駆動方法 | |
| US20130069575A1 (en) | Brushless motor driving apparatus and brushless motor driving method | |
| JP4735681B2 (ja) | モータ制御回路,車両用ファン駆動装置及びモータ制御方法 | |
| JP2010252619A (ja) | ブラシレスモータの起動方法及び制御装置 | |
| US8890451B2 (en) | Sensorless control unit for brushless DC motor | |
| US8729840B2 (en) | Sensorless control unit for brushless DC motor | |
| US10218295B2 (en) | Motor drive controller and method for controlling motor | |
| JP2007151267A (ja) | モータ駆動装置 | |
| JP5724353B2 (ja) | 電動ポンプ用ブラシレスモータの制御装置 | |
| JP5087411B2 (ja) | モータ駆動装置 | |
| JP6150694B2 (ja) | ブラシレスモータの駆動装置 | |
| JP6058449B2 (ja) | ブラシレスモータの駆動装置 | |
| US20130280101A1 (en) | Electric pump device | |
| JP6244694B2 (ja) | ブラシレスモータの制御装置 | |
| JP2007074834A (ja) | センサレスモータの起動装置 | |
| JP2005278320A (ja) | ブラシレスモータの起動方法、ブラシレスモータの制御装置及び電動ポンプ | |
| WO2018037830A1 (ja) | モータ制御装置 | |
| JP2005312145A (ja) | ブラシレスモータの駆動装置 | |
| JP2013236431A (ja) | ブラシレスモータの制御方法及び制御装置 | |
| JP2018198497A (ja) | モータ駆動制御装置及びモータの駆動制御方法 | |
| JP5396828B2 (ja) | ブラシレスモータの安定制御装置 | |
| JP2005278360A (ja) | ブラシレスモータのセンサレス制御方法、ブラシレスモータのセンサレス制御装置及び電動ポンプ | |
| US20150249410A1 (en) | Control Device and Control Method for Brushless Motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140812 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150303 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150316 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5724353 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |