JP2011510786A - 操縦係合カテーテルの装置、システム、および方法 - Google Patents
操縦係合カテーテルの装置、システム、および方法 Download PDFInfo
- Publication number
- JP2011510786A JP2011510786A JP2010545853A JP2010545853A JP2011510786A JP 2011510786 A JP2011510786 A JP 2011510786A JP 2010545853 A JP2010545853 A JP 2010545853A JP 2010545853 A JP2010545853 A JP 2010545853A JP 2011510786 A JP2011510786 A JP 2011510786A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- elongated tube
- distal end
- catheter
- wire
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 145
- 210000002216 heart Anatomy 0.000 claims abstract description 153
- 210000001519 tissue Anatomy 0.000 claims description 276
- 239000012530 fluid Substances 0.000 claims description 73
- 210000005003 heart tissue Anatomy 0.000 claims description 62
- 230000001746 atrial effect Effects 0.000 claims description 43
- 238000002347 injection Methods 0.000 claims description 39
- 239000007924 injection Substances 0.000 claims description 39
- 238000001802 infusion Methods 0.000 claims description 38
- 239000000126 substance Substances 0.000 claims description 21
- 210000001008 atrial appendage Anatomy 0.000 claims description 20
- 230000004044 response Effects 0.000 claims description 18
- 238000005452 bending Methods 0.000 claims description 15
- 239000000853 adhesive Substances 0.000 claims description 12
- 230000001070 adhesive effect Effects 0.000 claims description 12
- 239000000463 material Substances 0.000 claims description 12
- 238000003780 insertion Methods 0.000 claims description 11
- 230000037431 insertion Effects 0.000 claims description 11
- 230000002441 reversible effect Effects 0.000 claims description 11
- 206010052428 Wound Diseases 0.000 claims description 10
- 238000004891 communication Methods 0.000 claims description 10
- 238000007789 sealing Methods 0.000 claims description 6
- 210000004204 blood vessel Anatomy 0.000 claims description 5
- 230000001788 irregular Effects 0.000 claims description 5
- 230000036961 partial effect Effects 0.000 claims description 2
- 238000012974 catheter insertion method Methods 0.000 claims 2
- 238000000576 coating method Methods 0.000 description 37
- 239000011248 coating agent Substances 0.000 description 35
- 208000005228 Pericardial Effusion Diseases 0.000 description 23
- 210000003516 pericardium Anatomy 0.000 description 19
- 239000003814 drug Substances 0.000 description 18
- 229940079593 drug Drugs 0.000 description 17
- 238000013459 approach Methods 0.000 description 14
- 239000007789 gas Substances 0.000 description 13
- 238000011282 treatment Methods 0.000 description 12
- 208000006017 Cardiac Tamponade Diseases 0.000 description 11
- 239000008280 blood Substances 0.000 description 8
- 210000004369 blood Anatomy 0.000 description 8
- 238000009125 cardiac resynchronization therapy Methods 0.000 description 8
- 239000007788 liquid Substances 0.000 description 8
- 230000002861 ventricular Effects 0.000 description 8
- 238000007726 management method Methods 0.000 description 7
- 210000002837 heart atrium Anatomy 0.000 description 6
- 238000002560 therapeutic procedure Methods 0.000 description 6
- 239000002775 capsule Substances 0.000 description 5
- 230000000747 cardiac effect Effects 0.000 description 5
- 238000003745 diagnosis Methods 0.000 description 5
- 238000002594 fluoroscopy Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 230000005291 magnetic effect Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 108090000623 proteins and genes Proteins 0.000 description 5
- 230000009885 systemic effect Effects 0.000 description 5
- 230000001225 therapeutic effect Effects 0.000 description 5
- 230000007704 transition Effects 0.000 description 5
- 206010007558 Cardiac failure chronic Diseases 0.000 description 4
- 208000025584 Pericardial disease Diseases 0.000 description 4
- 201000010099 disease Diseases 0.000 description 4
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 4
- 238000012377 drug delivery Methods 0.000 description 4
- 238000002386 leaching Methods 0.000 description 4
- 208000031225 myocardial ischemia Diseases 0.000 description 4
- 210000004165 myocardium Anatomy 0.000 description 4
- 229910001000 nickel titanium Inorganic materials 0.000 description 4
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 4
- 210000005247 right atrial appendage Anatomy 0.000 description 4
- 238000002679 ablation Methods 0.000 description 3
- 239000003242 anti bacterial agent Substances 0.000 description 3
- 229940088710 antibiotic agent Drugs 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000001574 biopsy Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 210000000038 chest Anatomy 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 238000002651 drug therapy Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 210000005240 left ventricle Anatomy 0.000 description 3
- 230000003211 malignant effect Effects 0.000 description 3
- 210000004379 membrane Anatomy 0.000 description 3
- 239000012528 membrane Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 210000000056 organ Anatomy 0.000 description 3
- 210000004912 pericardial fluid Anatomy 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- -1 polytetrafluoroethylene Polymers 0.000 description 3
- 210000005241 right ventricle Anatomy 0.000 description 3
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 3
- 239000003106 tissue adhesive Substances 0.000 description 3
- 102000005741 Metalloproteases Human genes 0.000 description 2
- 108010006035 Metalloproteases Proteins 0.000 description 2
- 206010028980 Neoplasm Diseases 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 2
- TZCXTZWJZNENPQ-UHFFFAOYSA-L barium sulfate Chemical compound [Ba+2].[O-]S([O-])(=O)=O TZCXTZWJZNENPQ-UHFFFAOYSA-L 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 239000000227 bioadhesive Substances 0.000 description 2
- 230000003115 biocidal effect Effects 0.000 description 2
- 230000017531 blood circulation Effects 0.000 description 2
- KVVSCMOUFCNCGX-UHFFFAOYSA-N cardol Chemical compound CCCCCCCCCCCCCCCC1=CC(O)=CC(O)=C1 KVVSCMOUFCNCGX-UHFFFAOYSA-N 0.000 description 2
- 239000005018 casein Substances 0.000 description 2
- BECPQYXYKAMYBN-UHFFFAOYSA-N casein, tech. Chemical compound NCCCCC(C(O)=O)N=C(O)C(CC(O)=O)N=C(O)C(CCC(O)=N)N=C(O)C(CC(C)C)N=C(O)C(CCC(O)=O)N=C(O)C(CC(O)=O)N=C(O)C(CCC(O)=O)N=C(O)C(C(C)O)N=C(O)C(CCC(O)=N)N=C(O)C(CCC(O)=N)N=C(O)C(CCC(O)=N)N=C(O)C(CCC(O)=O)N=C(O)C(CCC(O)=O)N=C(O)C(COP(O)(O)=O)N=C(O)C(CCC(O)=N)N=C(O)C(N)CC1=CC=CC=C1 BECPQYXYKAMYBN-UHFFFAOYSA-N 0.000 description 2
- 235000021240 caseins Nutrition 0.000 description 2
- 239000003054 catalyst Substances 0.000 description 2
- 238000002659 cell therapy Methods 0.000 description 2
- 230000004087 circulation Effects 0.000 description 2
- 210000003748 coronary sinus Anatomy 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000005553 drilling Methods 0.000 description 2
- 210000000416 exudates and transudate Anatomy 0.000 description 2
- 210000003191 femoral vein Anatomy 0.000 description 2
- 230000005294 ferromagnetic effect Effects 0.000 description 2
- 238000002695 general anesthesia Methods 0.000 description 2
- 230000004217 heart function Effects 0.000 description 2
- 208000015181 infectious disease Diseases 0.000 description 2
- 239000003112 inhibitor Substances 0.000 description 2
- 210000004731 jugular vein Anatomy 0.000 description 2
- 210000005248 left atrial appendage Anatomy 0.000 description 2
- 230000000670 limiting effect Effects 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 238000002324 minimally invasive surgery Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000001613 neoplastic effect Effects 0.000 description 2
- 208000008494 pericarditis Diseases 0.000 description 2
- 229920002635 polyurethane Polymers 0.000 description 2
- 239000004814 polyurethane Substances 0.000 description 2
- 230000002035 prolonged effect Effects 0.000 description 2
- 210000005245 right atrium Anatomy 0.000 description 2
- 231100000241 scar Toxicity 0.000 description 2
- 239000003229 sclerosing agent Substances 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 230000000638 stimulation Effects 0.000 description 2
- 208000024891 symptom Diseases 0.000 description 2
- 229920001059 synthetic polymer Polymers 0.000 description 2
- 238000012800 visualization Methods 0.000 description 2
- 210000002417 xiphoid bone Anatomy 0.000 description 2
- LIHIBNOHKSQVFV-UHFFFAOYSA-N 3-cyano-2-methylprop-2-enoic acid Chemical compound OC(=O)C(C)=CC#N LIHIBNOHKSQVFV-UHFFFAOYSA-N 0.000 description 1
- 206010002091 Anaesthesia Diseases 0.000 description 1
- 206010003130 Arrhythmia supraventricular Diseases 0.000 description 1
- 206010003658 Atrial Fibrillation Diseases 0.000 description 1
- 206010006187 Breast cancer Diseases 0.000 description 1
- 208000026310 Breast neoplasm Diseases 0.000 description 1
- 206010058039 Cardiac perforation Diseases 0.000 description 1
- 208000006029 Cardiomegaly Diseases 0.000 description 1
- 206010048610 Cardiotoxicity Diseases 0.000 description 1
- 208000035473 Communicable disease Diseases 0.000 description 1
- 108010080379 Fibrin Tissue Adhesive Proteins 0.000 description 1
- 108050007372 Fibroblast Growth Factor Proteins 0.000 description 1
- 102000018233 Fibroblast Growth Factor Human genes 0.000 description 1
- CEAZRRDELHUEMR-URQXQFDESA-N Gentamicin Chemical compound O1[C@H](C(C)NC)CC[C@@H](N)[C@H]1O[C@H]1[C@H](O)[C@@H](O[C@@H]2[C@@H]([C@@H](NC)[C@@](C)(O)CO2)O)[C@H](N)C[C@@H]1N CEAZRRDELHUEMR-URQXQFDESA-N 0.000 description 1
- 229930182566 Gentamicin Natural products 0.000 description 1
- AEMRFAOFKBGASW-UHFFFAOYSA-N Glycolic acid Polymers OCC(O)=O AEMRFAOFKBGASW-UHFFFAOYSA-N 0.000 description 1
- 206010058467 Lung neoplasm malignant Diseases 0.000 description 1
- 206010061309 Neoplasm progression Diseases 0.000 description 1
- 208000001388 Opportunistic Infections Diseases 0.000 description 1
- 208000031481 Pathologic Constriction Diseases 0.000 description 1
- 239000004952 Polyamide Substances 0.000 description 1
- 229920002732 Polyanhydride Polymers 0.000 description 1
- 229920000954 Polyglycolide Polymers 0.000 description 1
- 206010051308 Radiation pericarditis Diseases 0.000 description 1
- 208000001647 Renal Insufficiency Diseases 0.000 description 1
- 206010039897 Sedation Diseases 0.000 description 1
- 206010041899 Stab wound Diseases 0.000 description 1
- 208000031737 Tissue Adhesions Diseases 0.000 description 1
- 108010073929 Vascular Endothelial Growth Factor A Proteins 0.000 description 1
- 102000005789 Vascular Endothelial Growth Factors Human genes 0.000 description 1
- 108010019530 Vascular Endothelial Growth Factors Proteins 0.000 description 1
- 206010047281 Ventricular arrhythmia Diseases 0.000 description 1
- 206010047472 Viral pericarditis Diseases 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 206010000891 acute myocardial infarction Diseases 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000037005 anaesthesia Effects 0.000 description 1
- 230000003444 anaesthetic effect Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000002491 angiogenic effect Effects 0.000 description 1
- 230000003288 anthiarrhythmic effect Effects 0.000 description 1
- 230000000840 anti-viral effect Effects 0.000 description 1
- 239000003416 antiarrhythmic agent Substances 0.000 description 1
- 239000002246 antineoplastic agent Substances 0.000 description 1
- 229940041181 antineoplastic drug Drugs 0.000 description 1
- 210000000709 aorta Anatomy 0.000 description 1
- 210000001765 aortic valve Anatomy 0.000 description 1
- 230000001580 bacterial effect Effects 0.000 description 1
- 239000000560 biocompatible material Substances 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 229920001222 biopolymer Polymers 0.000 description 1
- 230000000740 bleeding effect Effects 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 239000010839 body fluid Substances 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 201000009613 breast lymphoma Diseases 0.000 description 1
- 201000011510 cancer Diseases 0.000 description 1
- UFMJCOLGRWKUKO-UHFFFAOYSA-N cardol diene Natural products CCCC=CCC=CCCCCCCCC1=CC(O)=CC(O)=C1 UFMJCOLGRWKUKO-UHFFFAOYSA-N 0.000 description 1
- 210000004027 cell Anatomy 0.000 description 1
- 230000032823 cell division Effects 0.000 description 1
- 238000002512 chemotherapy Methods 0.000 description 1
- 230000001684 chronic effect Effects 0.000 description 1
- 208000020832 chronic kidney disease Diseases 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 208000029078 coronary artery disease Diseases 0.000 description 1
- 231100000433 cytotoxic Toxicity 0.000 description 1
- 230000001472 cytotoxic effect Effects 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 238000000502 dialysis Methods 0.000 description 1
- 238000002592 echocardiography Methods 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 229940126864 fibroblast growth factor Drugs 0.000 description 1
- 238000002637 fluid replacement therapy Methods 0.000 description 1
- 238000009472 formulation Methods 0.000 description 1
- 238000001415 gene therapy Methods 0.000 description 1
- 229960002518 gentamicin Drugs 0.000 description 1
- 239000003862 glucocorticoid Substances 0.000 description 1
- 239000003292 glue Substances 0.000 description 1
- 239000003102 growth factor Substances 0.000 description 1
- 238000001631 haemodialysis Methods 0.000 description 1
- 230000035876 healing Effects 0.000 description 1
- 208000013210 hematogenous Diseases 0.000 description 1
- 230000000322 hemodialysis Effects 0.000 description 1
- 230000000004 hemodynamic effect Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000028993 immune response Effects 0.000 description 1
- 239000002955 immunomodulating agent Substances 0.000 description 1
- 229940121354 immunomodulator Drugs 0.000 description 1
- 230000002757 inflammatory effect Effects 0.000 description 1
- 210000000936 intestine Anatomy 0.000 description 1
- 238000001990 intravenous administration Methods 0.000 description 1
- 201000006370 kidney failure Diseases 0.000 description 1
- 208000032839 leukemia Diseases 0.000 description 1
- 239000002502 liposome Substances 0.000 description 1
- 238000002690 local anesthesia Methods 0.000 description 1
- 239000003589 local anesthetic agent Substances 0.000 description 1
- 229960005015 local anesthetics Drugs 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 201000005202 lung cancer Diseases 0.000 description 1
- 208000020816 lung neoplasm Diseases 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 201000010893 malignant breast melanoma Diseases 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 210000001370 mediastinum Anatomy 0.000 description 1
- 239000012567 medical material Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 239000011859 microparticle Substances 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 230000002107 myocardial effect Effects 0.000 description 1
- 230000001114 myogenic effect Effects 0.000 description 1
- 239000002831 pharmacologic agent Substances 0.000 description 1
- 229920000747 poly(lactic acid) Polymers 0.000 description 1
- 229920002647 polyamide Polymers 0.000 description 1
- 229920001610 polycaprolactone Polymers 0.000 description 1
- 239000004632 polycaprolactone Substances 0.000 description 1
- 239000004626 polylactic acid Substances 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 1
- 239000004810 polytetrafluoroethylene Substances 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 235000018102 proteins Nutrition 0.000 description 1
- 102000004169 proteins and genes Human genes 0.000 description 1
- 210000003492 pulmonary vein Anatomy 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000007632 sclerotherapy Methods 0.000 description 1
- 208000011571 secondary malignant neoplasm Diseases 0.000 description 1
- 230000036280 sedation Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 210000000130 stem cell Anatomy 0.000 description 1
- 230000036262 stenosis Effects 0.000 description 1
- 208000037804 stenosis Diseases 0.000 description 1
- 210000002784 stomach Anatomy 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000007460 surgical drainage Methods 0.000 description 1
- 238000011477 surgical intervention Methods 0.000 description 1
- 208000011580 syndromic disease Diseases 0.000 description 1
- 229940037128 systemic glucocorticoids Drugs 0.000 description 1
- 230000000699 topical effect Effects 0.000 description 1
- 230000001988 toxicity Effects 0.000 description 1
- 231100000419 toxicity Toxicity 0.000 description 1
- 230000005751 tumor progression Effects 0.000 description 1
- 210000005166 vasculature Anatomy 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
- 210000001631 vena cava inferior Anatomy 0.000 description 1
- 210000002620 vena cava superior Anatomy 0.000 description 1
- 230000003612 virological effect Effects 0.000 description 1
- 230000009278 visceral effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images









































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0147—Tip steering devices with movable mechanical means, e.g. pull wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0067—Catheters; Hollow probes characterised by the distal end, e.g. tips
- A61M25/0068—Static characteristics of the catheter tip, e.g. shape, atraumatic tip, curved tip or tip structure
- A61M25/0071—Multiple separate lumens
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0067—Catheters; Hollow probes characterised by the distal end, e.g. tips
- A61M25/0082—Catheter tip comprising a tool
- A61M25/0084—Catheter tip comprising a tool being one or more injection needles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12Q—MEASURING OR TESTING PROCESSES INVOLVING ENZYMES, NUCLEIC ACIDS OR MICROORGANISMS; COMPOSITIONS OR TEST PAPERS THEREFOR; PROCESSES OF PREPARING SUCH COMPOSITIONS; CONDITION-RESPONSIVE CONTROL IN MICROBIOLOGICAL OR ENZYMOLOGICAL PROCESSES
- C12Q1/00—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions
- C12Q1/68—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions involving nucleic acids
- C12Q1/6876—Nucleic acid products used in the analysis of nucleic acids, e.g. primers or probes
- C12Q1/6888—Nucleic acid products used in the analysis of nucleic acids, e.g. primers or probes for detection or identification of organisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/12—Surgical instruments, devices or methods for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels or umbilical cord
- A61B17/122—Clamps or clips, e.g. for the umbilical cord
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00238—Type of minimally invasive operation
- A61B2017/00243—Type of minimally invasive operation cardiac
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00238—Type of minimally invasive operation
- A61B2017/00243—Type of minimally invasive operation cardiac
- A61B2017/00247—Making holes in the wall of the heart, e.g. laser Myocardial revascularization
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00831—Material properties
- A61B2017/00867—Material properties shape memory effect
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/30—Surgical pincettes, i.e. surgical tweezers without pivotal connections
- A61B2017/306—Surgical pincettes, i.e. surgical tweezers without pivotal connections holding by means of suction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00351—Heart
- A61B2018/00392—Transmyocardial revascularisation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M2025/0004—Catheters; Hollow probes having two or more concentrically arranged tubes for forming a concentric catheter system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M2025/0004—Catheters; Hollow probes having two or more concentrically arranged tubes for forming a concentric catheter system
- A61M2025/0006—Catheters; Hollow probes having two or more concentrically arranged tubes for forming a concentric catheter system which can be secured against axial movement, e.g. by using a locking cuff
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M2025/0024—Expandable catheters or sheaths
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M25/0026—Multi-lumen catheters with stationary elements
- A61M2025/0036—Multi-lumen catheters with stationary elements with more than four lumina
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M25/0026—Multi-lumen catheters with stationary elements
- A61M2025/0039—Multi-lumen catheters with stationary elements characterized by lumina being arranged coaxially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M25/0026—Multi-lumen catheters with stationary elements
- A61M2025/004—Multi-lumen catheters with stationary elements characterized by lumina being arranged circumferentially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0147—Tip steering devices with movable mechanical means, e.g. pull wires
- A61M2025/015—Details of the distal fixation of the movable mechanical means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M2025/0161—Tip steering devices wherein the distal tips have two or more deflection regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M25/0026—Multi-lumen catheters with stationary elements
- A61M25/003—Multi-lumen catheters with stationary elements characterized by features relating to least one lumen located at the distal part of the catheter, e.g. filters, plugs or valves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0067—Catheters; Hollow probes characterised by the distal end, e.g. tips
- A61M25/0068—Static characteristics of the catheter tip, e.g. shape, atraumatic tip, curved tip or tip structure
- A61M25/007—Side holes, e.g. their profiles or arrangements; Provisions to keep side holes unblocked
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0067—Catheters; Hollow probes characterised by the distal end, e.g. tips
- A61M25/0074—Dynamic characteristics of the catheter tip, e.g. openable, closable, expandable or deformable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M29/00—Dilators with or without means for introducing media, e.g. remedies
- A61M29/02—Dilators made of swellable material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0587—Epicardial electrode systems; Endocardial electrodes piercing the pericardium
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biophysics (AREA)
- General Health & Medical Sciences (AREA)
- Anesthesiology (AREA)
- Pulmonology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Hematology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biomedical Technology (AREA)
- Chemical & Material Sciences (AREA)
- Organic Chemistry (AREA)
- Proteomics, Peptides & Aminoacids (AREA)
- Analytical Chemistry (AREA)
- Mechanical Engineering (AREA)
- Zoology (AREA)
- Wood Science & Technology (AREA)
- Genetics & Genomics (AREA)
- Biochemistry (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Microbiology (AREA)
- Immunology (AREA)
- Biotechnology (AREA)
- General Engineering & Computer Science (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Surgical Instruments (AREA)
Abstract
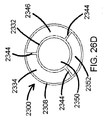
【選択図】図23
Description
I本開示の操縦係合カテーテル2300の実施形態において、操縦係合カテーテル2300は、2つ以上のアンカー位置2318を含み、制御装置2316の操作により、操縦ワイヤ2310を、2つ以上のアンカー位置2318に沿って摺動させ、細長いチューブ 2302を操縦ワイヤ2310の動きに従って2つ以上の場所で屈曲させる。 操縦係合カテーテル 2300の少なくとも1つ以上の実施形態において、制御装置2316の第1方向への操作により、操縦ワイヤ 2310はアンカー位置2318に沿って制御装置2316の第1方向へ摺動し、細長いチューブ 2302を第1方向へ屈曲させる。 さらに、同一または別の実施形態において、制御装置2316の第2方向への操作により、操縦ワイヤ 2310はアンカー位置2318に沿って制御装置2316から離れる方向へ摺動し、最初は屈曲した構成であった細長いチューブ 2302を少なくとも部分的に直線的にする。
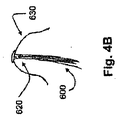
図23を参照するとスカート2326は、細長いチューブ2302の周囲と実質的に類似する周囲を持つ近位端2328を含むことができ、また、スカート2326はさらに、細長いチューブ2302の周囲より大きな周囲を持つ遠位端2330を含むことができる。
Claims (168)
- 以下を含む操縦係合カテーテル。
近位端と遠位端、細長いチューブの長さに沿って周囲に位置づけられた第1壁を有する細長いチューブ、細長いチューブは、送達カテーテルを細長いチューブへ少なくとも部分的に挿入し得るよう構成される。
近位端と遠位端を有する少なくとも1本の操縦ワイヤ、操縦ワイヤの遠位端は、細長いチューブの遠位端またはその近傍で細長いチューブの第1壁に連結する。
少なくとも1本の操縦ワイヤの近位端またはその近傍において、少なくとも1本の操縦ワイヤに動作可能に連結する制御装置、制御装置は、細長いチューブの近位端またはその近傍において細長いチューブに位置付けられる。 - 請求項1の操縦係合カテーテルにおいて、制御装置の操作は、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項1の操縦係合カテーテルにおいて、少なくとも1本の操縦ワイヤは細長いチューブに沿った1つ以上のアンカー位置において、細長いチューブに摺動係合する。
- 請求項3の操縦係合カテーテルにおいて、制御装置の操作により、少なくとも1本の操縦ワイヤは、1つ以上のアンカー位置に沿って摺動し、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項4の操縦係合カテーテルにおいて、細長いチューブの屈曲は、それまでほぼ直線的な細長いチューブを屈曲させる。
- 請求項4の操縦係合カテーテルにおいて、細長いチューブの屈曲は、それまで屈曲している細長いチューブをさらに屈曲させる。
- 請求項3の操縦係合カテーテルにおいて、1つ以上のアンカー位置は2つ以上のアンカー位置を含む場合、制御装置の操作により、少なくとも1本の操縦ワイヤは、2つ以上のアンカー位置に沿って摺動し、少なくとも1本の操縦ワイヤの動きに合わせて2か所以上の場所で細長いチューブを屈曲させる。
- 請求項3の操縦係合カテーテルにおいて、第1方向における制御装置の操作により、少なくとも1本の操縦ワイヤが、1つ以上のアンカー位置に沿って制御装置にむかう方向で摺動し、第1方向へ細長いチューブを屈曲させる。
- 請求項3の操縦係合カテーテルにおいて、第2方向における制御装置の操作により、少なくとも1本の操縦ワイヤが、1つ以上のアンカー位置に沿って制御装置から離れる方向に摺動し、細長いチューブを最初の屈曲構成から少なくとも部分的に伸展させる。
- 請求項1の操縦係合カテーテルにおいて、少なくとも1本の操縦ワイヤは、2本の操縦ワイヤを含み、2本の操縦ワイヤは細長いチューブに沿った2つ以上のアンカー位置において、細長いチューブに摺動係合する。
- 請求項10の操縦係合カテーテルにおいて、2つ以上のアンカー位置は4つのアンカー位置を含み、2本の操縦ワイヤのうち1本は4つのアンカー位置の2つで細長いチューブに摺動係合し、もう1本の操縦ワイヤは4つのアンカー位置の残りの2つで細長いチューブに摺動係合し、制御装置の操作により、2本の操縦ワイヤは4つのアンカー位置にそって摺動し、2本の操縦ワイヤの動きに合わせて2か所で細長いチューブを屈曲させる。
- 請求項1の操縦係合カテーテルにおいて、制御装置は、少なくとも1本の操縦ワイヤにその操縦ワイヤの近位端またはその近傍で連結するハンドルを含む。
- 請求項1の操縦係合カテーテルにおいて、少なくとも1本の操縦ワイヤは2本の操縦ワイヤを含み、制御装置は2本の操縦ワイヤのうちの1本に操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結した第1ハンドルを含み、また制御装置はもう1本の操縦ワイヤに、その操縦ワイヤの近位端またはその近傍において連結した第2ハンドルを含む。
- 請求項1の操縦係合カテーテルにおいて、制御装置は、少なくとも1本の操縦ワイヤにその操縦ワイヤの近位端またはその近傍で連結する回転可能なスプールを含む。回転可能なスプールは、少なくとも1本の操縦ワイヤの回収および分配するよう動作可能である。
- 請求項14の操縦係合カテーテルにおいて、回転可能なスプールは回転可能なダイヤルに連結し、回転可能なダイヤルの回転により、回転可能なスプールは回転し、回転可能なスプールの回転により、細長いチューブは少なくとも1本の操縦ワイヤの動きにあわせて屈曲する。
- 請求項1の操縦係合カテーテルにおいて、少なくとも1本の操縦ワイヤは2本の操縦ワイヤを含み、ここで制御装置は2本の操縦ワイヤのうちの1本に操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結した第1の回転可能なスプールを含み、また制御装置はもう1本の操縦ワイヤに、その操縦ワイヤの近位端またはその近傍において連結した第2の回転可能なスプールを含む。ここで第1の回転可能なスプール、第2の回転可能なスプールは、それぞれ2本のうち1本の操縦ワイヤを回収および分配するよう動作可能である。
- 請求項16の操縦係合カテーテルにおいて、第1の回転可能なスプールは、第1の回転可能なダイヤルの回転が第1の回転可能なスプールを回転させるような形で、第1の回転可能なダイヤルに連結し、ここで、第2の回転可能なスプールは、第2の回転可能なダイヤルの回転が第2の回転可能なスプールを回転させるような形で、第2の回転可能なダイヤルに連結し、またここで、第1の回転可能なスプールと第2の回転可能なスプールの回転は、2本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項1の操縦係合カテーテルにおいて、少なくとも1本の操縦ワイヤは3本の操縦ワイヤを含み、制御装置は3本の操縦ワイヤのうちの1本に操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結した第1の回転可能なスプールを含み、また制御装置は2本のうち2本目の操縦ワイヤに、3本のうち2本目の操縦ワイヤの近位端またはその近傍において連結した第2の回転可能なスプールを含み、また制御装置は3本のうち3本目の操縦ワイヤに、3本のうち3本目の操縦ワイヤの近位端またはその近傍において連結した第3の回転可能なスプールを含み、ここで第1の回転可能なスプール、第2の回転可能なスプール、第3の回転可能なスプールは、それぞれ3本のうち1本の操縦ワイヤの回収および分配するよう動作可能である。
- 請求項1の操縦係合カテーテルはさらに、細長いチューブの遠位端に動作可能な形で接続するスカートを含み、該スカートの近位端の周囲は、細長いチューブの外周とほとんど同じであり、さらに該スカートの遠位端の周囲は、細長いチューブの周囲より大きい。
- 請求項1の操縦係合カテーテルにおいて、細長いチューブはさらに以下を含む。
細長いチューブの長さに沿って周囲に位置づけられた第2壁、ここで第1壁と第2壁は、細長いチューブの長さに沿って第1壁と第2壁の間に少なくとも1つの吸引チャネルを形成する。
細長いチューブの近位端と連通する真空ポート、真空ポートは、少なくとも1つの吸引チャネルと動作可能な形で接続し、真空源と動作可能に接続できる。
細長いチューブの遠位端において少なくとも1つの吸引チャネルと連通する吸引ポート。吸引ポートは組織の表面に係合するよう構成される。 - 請求項20の操縦係合カテーテルはさらに、吸引ポートまたはその近傍で細長いチューブの遠位端に動作可能な形で接続するスカートを含み、該スカートの近位端の周囲は、細長いチューブの外周とほとんど同じであり、さらに該スカートの遠位端の周囲は、細長いチューブの周囲より大きい。これにより該スカートの遠位端は着脱可能な形で、組織の表面に係合するよう動作でき、スカートは、真空源を動作可能に真空ポートに取り付けた場合に組織表面に可逆的密閉を形成することができる。
- 請求項21の操縦係合カテーテルにおいて、スカートは変形可能な構成を含む。
- 請求項22の操縦係合カテーテルにおいて、スカートの変形可能な構成は、拡張構成へと拡張することができる。
- 請求項23の操縦係合カテーテルにおいて、拡張構成は、フラスト円錐形構成である。
- 請求項23の操縦係合カテーテルにおいて、拡張構成は、不定形のフラスト円錐形構成である。
- 請求項22の操縦係合カテーテルにおいて、スカートは、スカートが少なくとも部分的に細長いチューブの周囲に位置づけられたスリーブに囲まれている際に、折畳構成を有し、スカートがスリーブに囲まれていない際に拡張構成を有する。
- 請求項21の操縦係合カテーテルにおいて、操縦係合カテーテルのスカートが係合した組織は、心臓の周囲の組織を含む。
- 請求項27の操縦係合カテーテルにおいて、スカートは、心臓の内壁に取り付けられた際に、心臓と心膜嚢の間の心膜腔を広げることができる。
- 請求項20の操縦係合カテーテルはさらに、少なくとも1つの吸引チャネル内に位置づけられ、第1壁と第2壁に取り付けられた少なくとも1つの内部管腔支持を含み、また細長いチューブの長さの少なくとも大部分に沿って.細長いチューブの遠位端から延在する少なくとも1つの内部管腔支持を有する。
- 請求項29の操縦係合カテーテルにおいて、少なくとも1つの内部管腔支持は2つの内部管腔支持、および2つの吸引チャネルを含む少なくとも1つの吸引チャネルを含む。
- 請求項20の操縦係合カテーテルはさらに、細長いチューブの長さに沿って形成された注入チャネルを含む。注入チャネルは、その遠位端に、組織へ流体を投与するための少なくとも1つの開口を有する。注入チャネルは注入チャネルの近位端において外部流体源へ動作可能に取り付けることができる。外部流体源からの流体は、外部流体源を注入チャネルに動作可能に取り付けた場合に注入チャネルを通して組織へ流れ得る。
- 操縦係合カテーテルは以下を含む。
近位端と遠位端を有し、また細長いチューブの長さに沿って周囲に位置づけられた第1壁と第2壁を有する細長いチューブ。ここで第1壁と第2壁は、細長いチューブの長さに沿って第1壁と第2壁の間に少なくとも1つの吸引チャネルを形成する。
細長いチューブの近位端と連通する真空ポート、真空ポートは、少なくとも1つの吸引チャネルと動作可能な形で接続し、真空源と動作可能に接続できる。
細長いチューブの遠位端において少なくとも1つの吸引チャネルと連通する吸引ポート。吸引ポートは組織の表面に係合するよう構成される。
変形可能な構成を含むスカート。スカートは、吸引ポートまたはその近傍で細長いチューブの遠位端に動作可能な形で接続し、該スカートの近位端の周囲は、細長いチューブの外周とほとんど同じであり、さらに該スカートの遠位端の周囲は、細長いチューブの周囲より大きい。これにより該スカートの遠位端は着脱可能な形で、組織の表面に係合するよう動作でき、スカートは、真空源を動作可能に真空ポートに取り付けた場合に組織表面に可逆的密閉を形成することができる。
近位端と遠位端を有する少なくとも1本の操縦ワイヤ、操縦ワイヤの遠位端は、細長いチューブの近位端またはその近傍において、細長いチューブの第1壁に連結し、少なくとも1本の操縦ワイヤは、細長いチューブに沿った1つ以上のアンカー位置において、細長いチューブに摺動係合する。
少なくとも1本の操縦ワイヤへ、その操縦ワイヤの近位端またはその近傍において動作可能に連結する制御装置。細長いチューブの近位端またはその近傍に位置づけられた制御装置、ここで制御装置の操作により、少なくとも1本の操縦ワイヤは1つ以上のアンカー位置に沿って摺動し、細長いチューブを少なくとも1本の操縦ワイヤの動きに合わせて屈曲させる。 - 組織を係合するための真空源を使用するシステム。該システムは以下を含む。
操縦係合カテーテルは以下を含む。
近位端と遠位端、細長いチューブの長さに沿ってその周囲に位置づけられた第1壁と第2壁を有する細長いチューブ、近位端と遠位端の間に延在する第1および第2管腔を画定する第1および第2壁。
操縦係合カテーテルの近位端またはその近傍に位置する真空ポート、真空ポートは、操縦係合カテーテルの第1管腔に動作可能な形で接続し、真空源と動作可能に接続できる。
操縦係合カテーテルの遠位端またはその近傍に位置する吸引ポート、操縦係合カテーテルの第1管腔に動作可能な形で接続する吸引ポート、真空源を真空ポートへ動作可能に取り付けた場合に組織の表面を係合するよう構成された吸引ポート
近位端と遠位端を有するすくなくとも1つの操縦ワイヤ、操縦ワイヤの遠位端は、細長いチューブの遠位端またはその近傍で細長いチューブの第1壁に連結する。
少なくとも1本の操縦ワイヤの近位端またはその近傍において、少なくとも1本の操縦ワイヤに動作可能に連結する制御装置、細長いチューブの近位端またはその近傍において細長いチューブに位置付けられた制御装置。
以下を含む送達カテーテル
近位端と遠位端を有する中空チューブ、中空チューブが操縦係合カテーテルの第2管腔に挿入できるように構成された送達カテーテル
送達カテーテルの遠位端に位置づけられた針
この中で送達カテーテルは、標的部位へ物質を送達できる。 - 請求項の33のシステムにおいて、制御装置の操作は、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項33のシステムにおいて、少なくとも1本の操縦ワイヤは、細長いチューブに沿った1つ以上のアンカー位置において、細長いチューブに摺動係合する。
- 請求項の35のシステムにおいて、制御装置の操作は、少なくとも1本の操縦ワイヤを、1つ以上のアンカー位置に沿って摺動させ、細長いチューブを、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項36のシステムにおいて、細長いチューブの屈曲は、それまでほとんど直線的であった細長いチューブを屈曲させる。
- 請求項の36において、細長いチューブの屈曲は、それまで屈曲していた細長いチューブをさらに屈曲させる。
- 請求項の35のシステムにおいて、少なくとも1つのアンカー位置は、2つ以上のアンカー位置を含み、そこで、制御装置の操作は、少なくとも1本の操縦ワイヤを、2つ以上のアンカー位置に沿って摺動させ、細長いチューブを、少なくとも1本の操縦ワイヤの動きに合わせて2箇所以上で屈曲させる。
- 請求項の35のシステムにおいて、制御装置の第1方向における操作は、少なくとも1本の操縦ワイヤを、1つ以上のアンカー位置に沿って摺動させ、細長いチューブを、第1方向において、制御装置に向かう方向に屈曲させる。
- 請求項の35のシステムにおいて、制御装置の第2方向における操作は、少なくとも1本の操縦ワイヤを、1つ以上のアンカー位置に沿って摺動させ、細長いチューブを、最初に屈曲していた構成から少なくとも部分的に、制御装置から離れる方向へ伸展させる。
- 請求項33のシステムにおいて、少なくとも1本の操縦ワイヤは、2本の操縦ワイヤを含み、2本の操縦ワイヤは細長いチューブに沿った2つ以上のアンカー位置において、細長いチューブに摺動係合する。
- 請求項42のシステムにおいて、2つ以上のアンカー位置は4つのアンカー位置を含み、2本の操縦ワイヤのうち1本は4つのアンカー位置のうちの2つで細長いチューブに摺動係合し、もう1本の操縦ワイヤは4つのアンカー位置のうちの残りの2つで細長いチューブに摺動係合し、制御装置の操作により、2本の操縦ワイヤは4つのアンカー位置にそって摺動し、2か所で2本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項33のシステムにおいて、制御装置は、少なくとも1本の操縦ワイヤにその操縦ワイヤの近位端またはその近傍で連結するハンドルを含む。
- 請求項33のシステムにおいて、少なくとも1本の操縦ワイヤは2本の操縦ワイヤを含み、制御装置は2本の操縦ワイヤのうちの1本に操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結した第1ハンドルを含み、また制御装置はもう1本の操縦ワイヤに、その操縦ワイヤの近位端またはその近傍において連結した第2ハンドルを含む。
- 請求項33のシステムにおいて、制御装置は、少なくとも1本の操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結する回転可能なスプールを含む。回転可能なスプールは、少なくとも1本の操縦ワイヤを回収および分配するよう動作可能である。
- 請求項46のシステムにおいて、回転可能なスプールは回転可能なダイヤルに連結し、回転可能なダイヤルの回転により、回転可能なスプールは回転し、回転可能なスプールの回転により、細長いチューブは少なくとも1本の操縦ワイヤの動きにあわせて屈曲する。
- 請求項33のシステムにおいて、少なくとも1本の操縦ワイヤは2本の操縦ワイヤを含み、制御装置は2本の操縦ワイヤのうちの1本に操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結した第1の回転可能なスプールを含み、また制御装置はもう1本の操縦ワイヤに、その操縦ワイヤの近位端またはその近傍において連結した第2の回転可能なスプールを含む。ここで第1の回転可能なスプール、第2の回転可能なスプールは、それぞれ2本のうち1本の操縦ワイヤを回収および分配するよう動作可能である。
- 請求項48のシステムにおいて、第1の回転可能なスプールは、第1の回転可能なダイヤルの回転が第1の回転可能なスプールを回転させるような形で、第1の回転可能なダイヤルに連結し、ここで、第2の回転可能なスプールは、第2の回転可能なダイヤルの回転が第2の回転可能なスプールを回転させるような形で、第2の回転可能なダイヤルに連結し、またここで、第1の回転可能なスプールと第2の回転可能なスプールの回転は、2本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項33のシステムにおいて、少なくとも1本の操縦ワイヤは3本の操縦ワイヤを含み、制御装置は3本の操縦ワイヤのうちの1本に操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結した第1の回転可能なスプールを含み、また制御装置は2本のうち2本目の操縦ワイヤに、3本のうち2本目の操縦ワイヤの近位端またはその近傍において連結した第2の回転可能なスプールを含み、また制御装置は3本のうち3本目の操縦ワイヤに、3本のうち3本目の操縦ワイヤの近位端またはその近傍において連結した第3の回転可能なスプールを含み、ここで第1の回転可能なスプール、第2の回転可能なスプール、第3の回転可能なスプールは、それぞれ3本のうち1本の操縦ワイヤの回収および分配するよう動作可能である。
- 請求項33のシステムはさらに、吸引ポートまたはその近傍において、細長いチューブの遠位端に動作可能な形で接続するスカートを含み、該スカートの近位端の周囲は、細長いチューブの外周とほとんど同じであり、さらに該スカートの遠位端の周囲は、細長いチューブの周囲より大きい。
- 請求項33のシステムはさらに、近位端、遠位端、およびスリーブの近位端と遠位端の間に延在する管腔を含むスリーブを含む。ここで該スリーブは、操縦係合カテーテルの周囲に位置づけられ、スリーブは操縦係合カテーテルに摺動係合する。
- 請求項52のシステムはさらに、吸引ポートまたはその近傍で細長いチューブの遠位端に動作可能な形で接続するスカートを含み、該スカートの近位端の周囲は、細長いチューブの外周とほとんど同じであり、さらに該スカートの遠位端の周囲は、細長いチューブの周囲より大きい。これにより該スカートの遠位端は着脱可能な形で、組織の表面に係合するよう動作でき、スカートは、真空源を動作可能に真空ポートに取り付けた場合に組織表面に可逆的密閉を形成することができる。
- 請求項53のシステムにおいて、スカートは変形可能な構成を含む。
- 請求項54のシステムにおいて、スカートの変形可能な構成は、拡張構成へと拡張することができる。
- 請求項55のシステムにおいて、拡張構成は、フラスト円錐形構成である。
- 請求項55のシステムにおいて、拡張構成は、不定形のフラスト円錐形構成である。
- 請求項54のシステムにおいて、スカートは、スカートが少なくとも部分的に細長いチューブの周囲に位置づけられたスリーブに囲まれている際に、折畳構成を有し、スカートがスリーブに囲まれていない際に拡張構成を有する。
- 請求項53のシステムにおいて、操縦係合カテーテルのスカートが係合した組織は、心臓の周囲の組織を含む。
- 請求項59のシステムにおいて、スカートは、心臓の内壁に取り付けられた際に、心臓と心膜嚢の間の心膜腔を広げることができる。
- 請求項52のシステムはさらに、第2管腔内に位置づけられ、第1壁と第2壁に取り付けられた少なくとも1つの内部管腔支持を含む。かかる少なくとも1つの内部管腔支持は、細長いチューブの少なくとも大部分の長さに沿って、細長いチューブの遠位端から延在する。
- 請求項61のシステムにおいて、少なくとも1本の内部管腔支持は、2つの内部管腔支持を含む。
- 請求項52のシステムはさらに、細長いチューブの長さに沿って形成された注入チャネルを含む。注入チャネルは、その遠位端に、組織へ流体を投与するための少なくとも1つの開口を有する。注入チャネルは注入チャネルの近位端において外部流体源へ動作可能に取り付けることができる。外部流体源からの流体は、外部流体源を注入チャネルに動作可能に取り付けた場合に注入チャネルを通して組織へ流れ得る。
- 請求項33のシステムにおいて、システムは、心膜嚢.から組織を引き離すことにより、組織と心臓を囲む心膜嚢の間の心膜腔を広げることができる。
- 請求項54のシステムはさらに、近位端、遠位端、およびスリーブの近位端と遠位端の間に延在する管腔を含むスリーブを含む。ここで該スリーブは、操縦係合カテーテルの周囲に位置づけられ、スリーブは操縦係合カテーテルに摺動係合する。
- 請求項65のシステムにおいて、スリーブは操縦係合カテーテルの遠位端に位置づけることができ、該スリーブは少なくとも部分的にスカートを囲む。
- 請求項66のシステムにおいて、スカートの変形可能な構成は、スリーブによって少なくとも部分的に囲まれた際に、仕舞われる。
- 請求項65のシステムにおいて、スリーブは、スカートを囲むのではなく、操縦係合カテーテルに沿って位置づけられ、ここにおいて、スカートは、拡張構成へと拡張することができる。
- 請求項68のシステムにおいて、拡張構成は、フラスト円錐形構成である。
- 請求項68のシステムにおいて、拡張構成は、不定形のフラスト円錐形構成である。
- 請求項33のシステムにおいて、該組織は、心房壁の一部分を含む。
- 請求項33のシステムにおいて、該組織は、心耳の一部分を含む。
- 請求項33のシステムにおいて、係合カテーテルが係合した組織は、心臓周囲の組織で、また、第2管腔に中空チューブが挿入され、該組織に吸引ポートが取り付けられた際に、針が組織を穿刺できるよう位置づけられ、組織が穿刺された場合に心膜腔へのアクセスが達成される場所である。
- 請求項64のシステムはさらに、心膜腔に挿入するガイドワイヤを含む。
- 請求項74のシステムにおいて、該針は、中空チューブと連通する中空針を含み、中空チューブと中空針を通じてガイドワイヤを心膜腔へ挿入できる。
- 請求項33のシステムにおいて、操縦係合カテーテルはさらに細長いチューブの近位端と遠位端の間に延在する操縦係合カテーテルの第3管腔と流体連通する注入チャネルを含む。注入チャネルは組織に流体を投与するよう構成される。
- 請求項76のシステムにおいて、流体は接着剤を含む。
- 請求項76のシステムにおいて、注入チャネルはリング型をしている。
- 請求項33のシステムにおいて、操縦係合カテーテルはさらに、操縦係合カテーテルの長さに沿って形成された注入チャネルを含む。注入チャネルは、その遠位端に、標的組織へ流体を投与するための少なくとも1つの開口を有する。注入チャネルは注入チャネルの近位端において外部流体源へ動作可能に取り付けることができる。これにより外部流体源からの流体は、外部流体源を注入チャネルに動作可能に取り付けた場合に注入チャネルを通して標的組織へ流れ得る。
- 請求項33のシステムにおいて、針は、組織を穿刺するための針ワイヤを含む。
- 請求項33のシステムにおいて、針は圧力先端針を含む。
- 請求項33のシステムにおいて、操縦係合カテーテルは、操縦係合カテーテルの長さに沿った湾曲を含む。
- 請求項82のシステムにおいて、操縦係合カテーテルの湾曲は、約45度の角度を形成する。
- 請求項82のシステムにおいて、操縦係合カテーテルの湾曲が、約90度の角度を形成する際、操縦係合カテーテルの一部分は、操縦係合カテーテルの残りの部分に対してほぼ垂直となる。
- 請求項82のシステムにおいて、操縦係合カテーテルの湾曲がある角度を形成する際、操縦係合カテーテルの一部分は、操縦係合カテーテルの残りの部分に対してほぼ平行となる。
- 組織を係合するための真空源を使用するシステム。該システムは以下を含む。
以下を含む操縦係合カテーテル
近位端と遠位端、細長いチューブの長さに沿ってその周囲に位置づけられた第1壁と第2壁を有する細長いチューブ、近位端と遠位端の間に延在する第1および第2管腔を画定する第1および第2壁。
操縦係合カテーテルの近位端またはその近傍に位置する真空ポート、真空ポートは、操縦係合カテーテルの第1管腔に動作可能な形で接続し、真空源と動作可能に接続できる。
操縦係合カテーテルの遠位端またはその近傍に位置する吸引ポート、操縦係合カテーテルの第1管腔に動作可能な形で接続する吸引ポート、真空源を真空ポートへ動作可能に取り付けた場合に組織の表面を係合するよう構成された吸引ポート
変形可能な構成を含むスカート。細長いチューブの遠位端に動作可能に接続したスカート、近位端の周囲が細長いチューブの外周とほとんど同じであるスカート、遠位端の周囲が細長いチューブの周囲よりも大きいスカート、ここで、該スカートの遠位端は着脱可能な形で、組織の表面に係合するよう動作でき、該スカートは、真空源を動作可能に真空ポートに取り付けた場合に組織表面に可逆的密閉を形成することができる。
近位端と遠位端を有する少なくとも1本の操縦ワイヤ、操縦ワイヤの遠位端は、細長いチューブの近位端またはその近傍において、細長いチューブの第1壁に連結し、ここで少なくとも1本の操縦ワイヤは、細長いチューブに沿った1つ以上のアンカー位置において、細長いチューブに摺動係合する。
少なくとも1本の操縦ワイヤへ、その操縦ワイヤの近位端またはその近傍において動作可能に連結する制御装置。細長いチューブの近位端またはその近傍に位置づけられた制御装置、ここで制御装置の操作により、少なくとも1本の操縦ワイヤは1つ以上のアンカー位置に沿って摺動し、細長いチューブを少なくとも1本の操縦ワイヤの動きに合わせて屈曲させる。
以下を含む送達カテーテル
近位端と遠位端を有する中空チューブ、中空チューブが操縦係合カテーテルの第2管腔に挿入できるように構成された送達カテーテル
送達カテーテルの遠位端に位置づけられた針
この中で送達カテーテルは、標的部位へ物質を送達できる。 - 組織へリードを配置するための真空源を使用するシステム。該システムは以下を含む。
以下を含む操縦係合カテーテル
近位端と遠位端、細長いチューブの長さに沿ってその周囲に位置づけられた第1壁と第2壁を有する細長いチューブ、近位端と遠位端の間に延在する第1および第2管腔を画定する第1および第2壁。
近位端と遠位端を有するすくなくとも1つの操縦ワイヤ、操縦ワイヤの遠位端は、細長いチューブの遠位端またはその近傍で細長いチューブの第1壁に連結する。
少なくとも1本の操縦ワイヤの近位端またはその近傍において、少なくとも1本の操縦ワイヤに動作可能に連結する制御装置、細長いチューブの近位端またはその近傍において細長いチューブに沿って位置づけられた制御装置
1つの壁と第1管腔を有する中空チューブを含む送達カテーテル。ここで送達カテーテルは、操縦係合カテーテルの第2管腔に少なくとも部分的に挿入できるように構成される。
遠位端に先端を有するリード、このリードは送達カテーテルの第1管腔への少なくとも部分的な挿入を行うよう構成される。
操縦係合カテーテルの近位端またはその近傍に位置する真空ポート、真空ポートは、操縦係合カテーテルの第1管腔に動作可能な形で接続し、真空源と動作可能に接続できる。
操縦係合カテーテの第1管腔は、操縦係合カテーテルの遠位端またはその近傍に位置づけられた吸引ポートを含み、吸引ポートは、心臓の内壁の標的組織へ着脱可能に取り付くよう構成され、これにより、真空ポートに動作可能な形で真空源が取り付けられた際に、吸引ポートは、標的組織と可逆的密閉を形成できる。また、
ここでシステムは、標的組織を心膜嚢から引き離すことにより、標的組織と心臓を取り巻く心膜嚢の間の心膜腔を広げることができる。 - 請求項86のシステムにおいて、送達カテーテルの第1管腔は、中空チューブの近位端付近から、中空チューブの遠位端付近へ延在しており、送達カテーテルの第1管腔は、中空チューブの遠位端またはその近傍において中空チューブに対して屈曲し、また、中空チューブの遠位端またはその近傍において中空チューブの壁に出口を有する。
- 請求項87のシステムにおいて、送達カテーテルの第1管腔の屈曲は、約90度の角度を形成する。
- 請求項87のシステムにおいて、送達カテーテルの第2管腔は、送達カテーテルの中空チューブの近位端付近から、中空チューブの遠位端付近へ延在しており、送達カテーテルの第2管腔は、中空チューブの遠位端またはその近傍において中空チューブに対して屈曲し、また、中空チューブの遠位端またはその近傍において中空チューブの壁に出口を有する。
- 請求項90のシステムにおいて、送達カテーテルの第2管腔の屈曲は、約90度の角度を形成する。
- 請求項91のシステムにおいて、送達カテーテルの第1管腔の屈曲は、約90度の角度を形成する。
- 請求項88のシステムにおいて、リードは、ペーシングリードを含み、ペーシングリードの先端はネジのような形状を有する。
- 請求項の87のシステムにおいて、制御装置の操作は、少なくとも1本の操縦ワイヤの動きに合わせて操縦係合カテーテルの細長いチューブを屈曲させる。
- 請求項87のシステムにおいて、少なくとも1本の操縦ワイヤは、細長いチューブに沿った1つ以上のアンカー位置において、操縦係合カテーテルの細長いチューブに摺動係合する。
- 請求項の95のシステムにおいて、制御装置の操作は、少なくとも1本の操縦ワイヤを、1つ以上のアンカー位置に沿って摺動させ、操縦係合カテーテルの細長いチューブを、少なくとも1本の操縦ワイヤの動きに合わせて屈曲させる。
- 請求項96のシステムにおいて、操縦係合カテーテルの細長いチューブの屈曲は、それまでほとんど直線的であった細長いチューブを屈曲させる。
- 請求項96のシステムにおいて、操縦係合カテーテルの細長いチューブの屈曲は、それまで屈曲していた細長いチューブをさらに屈曲させる。
- 請求項の95のシステムにおいて、少なくとも1つのアンカー位置は、2つ以上のアンカー位置を含み、そこで、制御装置の操作は、少なくとも1本の操縦ワイヤを、2つ以上のアンカー位置に沿って摺動させ、細長いチューブを、少なくとも1本の操縦ワイヤの動きに合わせて2箇所以上で屈曲させる。
- 請求項の95のシステムにおいて、制御装置の第1方向における操作は、少なくとも1本の操縦ワイヤを、1つ以上のアンカー位置に沿って摺動させ、細長いチューブを、第1方向において、制御装置に向かう方向に屈曲させる。
- 請求項の95のシステムにおいて、制御装置の第2方向における操作は、少なくとも1本の操縦ワイヤを、1つ以上のアンカー位置に沿って摺動させ、細長いチューブを、最初に屈曲していた構成から少なくとも部分的に、制御装置から離れる方向へ伸展させる。
- 請求項87のシステムにおいて、少なくとも1本の操縦ワイヤは、2本の操縦ワイヤを含み、2本の操縦ワイヤは細長いチューブに沿った2つ以上のアンカー位置において、細長いチューブに摺動係合する。
- 請求項102のシステムにおいて、2つ以上のアンカー位置は4つのアンカー位置を含み、2本の操縦ワイヤのうち1本は4つのアンカー位置のうちの2つで細長いチューブに摺動係合し、もう1本の操縦ワイヤは4つのアンカー位置のうちの残りの2つで細長いチューブに摺動係合し、制御装置の操作により、2本の操縦ワイヤは4つのアンカー位置にそって摺動し、2か所で2本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項87のシステムにおいて、制御装置は、少なくとも1本の操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結する回転可能なスプールを含む。回転可能なスプールは、少なくとも1本の操縦ワイヤを回収および分配するよう動作可能である。
- 請求項104のシステムにおいて、回転可能なスプールは回転可能なダイヤルに連結し、回転可能なダイヤルの回転により、回転可能なスプールは回転し、回転可能なスプールの回転により、細長いチューブは少なくとも1本の操縦ワイヤの動きにあわせて屈曲する。
- 請求項87のシステムはさらに、細長いチューブの遠位端に動作可能な形で接続するスカートを含み、該スカートの近位端の周囲は、細長いチューブの外周とほとんど同じであり、さらに該スカートの遠位端の周囲は、細長いチューブの周囲より大きい。
- 請求項87のシステムにおいて、細長いチューブはさらに以下を含む。
細長いチューブの長さに沿って周囲に位置づけられた第2壁、ここで第1壁と第2壁は、細長いチューブの長さに沿って第1壁と第2壁の間に少なくとも1つの吸引チャネルを形成する。
細長いチューブの近位端と連通する真空ポート。真空ポートは、少なくとも1つの吸引チャネルと動作可能な形で接続し、真空源と動作可能に接続できる。
細長いチューブの遠位端において少なくとも1つの吸引チャネルと連通する吸引ポート。吸引ポートは組織の表面に係合するよう構成される。 - 請求項107のシステムはさらに、吸引ポートまたはその近傍で細長いチューブの遠位端に動作可能な形で接続するスカートを含み、該スカートの近位端の周囲は、細長いチューブの外周とほとんど同じであり、さらに該スカートの遠位端の周囲は、細長いチューブの周囲より大きい。これにより該スカートの遠位端は着脱可能な形で、組織の表面に係合するよう動作でき、スカートは、真空源を動作可能に真空ポートに取り付けた場合に組織表面に可逆的密閉を形成することができる。
- 請求項108のシステムにおいて、スカートは変形可能な構成を含む。
- 請求項109のシステムにおいて、スカートの変形可能な構成は、拡張構成へと拡張することができる。
- 請求項110のシステムにおいて、拡張構成は、フラスト円錐形構成である。
- 請求項110のシステムにおいて、拡張構成は、不定形のフラスト円錐形構成である。
- 請求項109のシステムにおいて、スカートは、スカートが少なくとも部分的に細長いチューブの周囲に位置づけられたスリーブに囲まれている際に、折畳構成を有し、スカートがスリーブに囲まれていない際に拡張構成を有する。
- 請求項108のシステムにおいて、操縦係合カテーテルのスカートが係合した組織は、心臓組織を含む。
- 請求項114のシステムにおいて、スカートは、心臓の内壁に取り付けられた際に、心臓と心膜嚢の間の心膜腔を広げることができる。
- 請求項87のシステムにおいて、システムは、心膜嚢.から組織を引き離すことにより、組織と心臓を囲む心膜嚢の間の心膜腔を広げることができる。
- 請求項109のシステムはさらに、近位端、遠位端、およびスリーブの近位端と遠位端の間に延在する管腔を含むスリーブを含む。ここで該スリーブは、操縦係合カテーテルの周囲に位置づけられ、スリーブは操縦係合カテーテルに摺動係合する。
- 請求項117のシステムにおいて、スリーブは操縦係合カテーテルの遠位端に位置づけることができ、該スリーブは少なくとも部分的にスカートを囲む。
- 請求項118のシステムにおいて、スカートの変形可能な構成は、スリーブによって少なくとも部分的に囲まれた際に、仕舞われる。
- 請求項119のシステムにおいて、スリーブは、スカートを囲むのではなく、操縦係合カテーテルに沿って位置づけられ、ここにおいて、スカートは、拡張構成へと拡張することができる。
- 請求項87のシステムにおいて、操縦係合カテーテルは、操縦係合カテーテルの長さに沿った湾曲を含む。
- 請求項121のシステムにおいて、操縦係合カテーテルの湾曲は、約45度の角度を形成する。
- 請求項121のシステムにおいて、操縦係合カテーテルの湾曲が、約90度の角度を形成する際、操縦係合カテーテルの一部分は、操縦係合カテーテルの残りの部分に対してほぼ垂直となる。
- 請求項121のシステムにおいて、操縦係合カテーテルの湾曲がある角度を形成する際、操縦係合カテーテルの一部分は、操縦係合カテーテルの残りの部分に対してほぼ平行となる。
- 標的組織を係合する方法、以下のステップを含む方法
以下を含む、操縦係合カテーテルを提供する
近位端と遠位端、細長いチューブの長さに沿って周囲に位置づけられた第1壁を有する細長いチューブ、細長いチューブの長さに沿って、第1管腔を画定する第1壁
近位端と遠位端を有するすくなくとも1つの操縦ワイヤ、操縦ワイヤの遠位端は、細長いチューブの遠位端またはその近傍で細長いチューブの第1壁に連結する。
少なくとも1本の操縦ワイヤの近位端またはその近傍において、少なくとも1本の操縦ワイヤに動作可能に連結する制御装置、該制御装置は、細長いチューブの近位端またはその近傍において細長いチューブに位置付けられる。
操縦係合カテーテルの遠位端が標的組織またはその近傍に位置づけられるよう、体内に操縦係合カテーテルを挿入する方法。 - 請求項125の方法において、操縦係合カテーテルは、心膜嚢.から組織を引き離すことにより、標的組織と心臓を囲む心膜嚢の間の心膜腔を広げることができる。
- 請求項126の方法において、操縦係合カテーテルを体内に挿入するステップには、操縦係合カテーテルの遠位端が心臓の内側に位置づけられ、操縦係合カテーテルの遠位端が心臓の内壁の標的組織に接触するようにするための、操縦係合カテーテルの挿入方法が含まれる。
- 請求項127の方法はさらに、操縦係合カテーテルの遠位端が心臓の内側の壁の標的組織に可逆的に取り付けられるよう、真空源を第1管腔へ動作可能に接続するステップを含む。
- 請求項125の方法において、操縦係合カテーテルはさらに、細長いチューブの遠位端に動作可能に接続したスカートを含む。
- 請求項130の方法において、操縦係合カテーテルを体内に挿入するステップには、操縦係合カテーテルの遠位端が心臓の内側に位置づけられ、スカートが心臓の内壁の標的組織に接触するようにするための、操縦係合カテーテルの挿入方法が含まれる。
- 請求項131の方法はさらに、スカートが心臓の内側の壁の標的組織に可逆的に取り付けるよう、真空源を第1管腔へ動作可能に接続するステップを含む。
- 請求項の125の方法はさらに、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させるよう、制御装置を操作するステップを含む。
- 請求項の125の方法において、少なくとも1本の操縦ワイヤは、細長いチューブに沿った1つ以上のアンカー位置において細長いチューブに摺動係合し、該方法はさらに、少なくとも1本の操縦ワイヤが1つ以上のアンカー位置に沿って摺動させ、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させるよう制御装置を操作するステップを含む。
- 請求項の125の方法において、細長いチューブに沿った1つ以上のアンカー位置において、少なくとも1本の操縦ワイヤが、細長いチューブに摺動係合する。また、該方法はさらに、少なくとも1本の操縦ワイヤが1つ以上のアンカー位置にそって摺動し、細長いチューブを、第1方向において、操縦装置に向かう方向に屈曲させるよう制御装置を第1方向において操作するステップを含む。
- 請求項の125の方法において、細長いチューブに沿った1つ以上のアンカー位置において、少なくとも1本の操縦ワイヤが、細長いチューブに摺動係合する。また、該方法はさらに、少なくとも1本の操縦ワイヤを1つ以上のアンカー位置に沿って制御装置から離れる方向に摺動し、最初は少なくとも部分的には屈曲していた構成の細長いチューブを伸展させるよう制御装置を第2方向に操作するステップを含む。
- 請求項の125の方法において、制御装置は、少なくとも1本の操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結した回転可能なスプールを含み、回転可能なスプールはその操作により、少なくとも1本の操縦ワイヤを回収および分配することができ、また、回転可能なスプールは回転可能なダイヤルに連結する。また、該方法はさらに、回転可能なダイヤルを回転させて、回転可能なスプールを回転させるステップを含み、ここで回転可能なスプールの回転は、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項の125の方法において、少なくとも1本の操縦ワイヤは2本の操縦ワイヤを含み、ここで制御装置は、少なくとも1本の操縦ワイヤに、その操縦ワイヤの近位端またはその近傍において連結する第1の回転可能なスプールを含み、また制御装置はさらに、2本の操縦ワイヤのもう1本に、その操縦ワイヤの近位端またはその近傍で連結する第2の回転可能なスプールを含み、ここで第1の回転可能なスプールと第2の回転可能なスプールは、2本の操縦ワイヤのうち1本を回収および分配するよう動作し、第1の回転可能なスプールと第2の回転可能なスプールの回転が、2本の操縦ワイヤの動きにあわせて細長いチューブを屈曲させるよう、第1の回転可能なダイヤルの回転が第1の回転可能なスプールを回転させるような形で第1の回転可能なスプールが第1の回転可能なダイヤルに連結し、また第2の回転可能なダイヤルの回転が第2の回転可能なスプールを回転させるような形で第2の回転可能なスプールが第2の回転可能なダイヤルに連結するステップを含む。
- 標的組織を係合する方法、以下のステップを含む方法
以下を含むシステムを提供する
以下を含む操縦係合カテーテル
近位端と遠位端、細長いチューブの長さに沿ってその周囲に位置づけられた第1壁と第2壁を有する細長いチューブ、近位端と遠位端の間に延在する第1および第2管腔を画定する第1および第2壁。
操縦係合カテーテルの近位端またはその近傍に位置する真空ポート、真空ポートは、操縦係合カテーテルの第1管腔に動作可能な形で接続し、真空源と動作可能に接続できる。
操縦係合カテーテルの遠位端またはその近傍に位置する吸引ポート、操縦係合カテーテルの第1管腔に動作可能な形で接続する吸引ポート、真空源を真空ポートへ動作可能に取り付けた場合に組織の表面を係合するよう構成された吸引ポート
近位端と遠位端を有するすくなくとも1本の操縦ワイヤ、操縦ワイヤの遠位端は、細長いチューブの遠位端またはその近傍で細長いチューブの第1壁に連結する。
少なくとも1本の操縦ワイヤの近位端またはその近傍において、少なくとも1本の操縦ワイヤに動作可能に連結する制御装置、該制御装置は、細長いチューブの近位端またはその近傍において細長いチューブに沿って位置付けられる。
以下を含む送達カテーテル
近位端と遠位端を有する中空チューブ、中空チューブが操縦係合カテーテルの第2管腔に挿入できるように構成された送達カテーテル
送達カテーテルの遠位端に位置づけられた針、および
操縦カテーテルの遠位端が標的組織またはその近傍に位置づけられるよう、体内に操縦係合カテーテルを挿入する方法 - 請求項139の方法において、操縦係合カテーテルは、心膜嚢.から組織を引き離すことにより、標的組織と心臓を囲む心膜嚢の間の心膜腔を広げることができる。
- 請求項140の方法において、操縦係合カテーテルを体内に挿入するステップには、操縦係合カテーテルの遠位端が心臓の内側に位置づけられ、操縦係合カテーテルの遠位端が心臓の内壁の標的組織に接触するようにするための、操縦係合カテーテルの挿入方法が含まれる。
- 請求項141の方法はさらに、操縦係合カテーテルの遠位端が心臓の内側の壁の標的組織に可逆的に取り付けられるよう、真空源を第1管腔へ動作可能に接続するステップを含む。
- 請求項139の方法において、操縦係合カテーテルはさらに、細長いチューブの遠位端へ動作可能に接続したスカートを含む。
- 請求項143の方法において、操縦係合カテーテルを体内に挿入するステップには、操縦係合カテーテルの遠位端が心臓の内側に位置づけられ、スカートが心臓の内壁の標的組織に接触するようにするための、操縦係合カテーテルの挿入方法が含まれる。
- 請求項144の方法はさらに、スカートが心臓の内側の壁の標的組織に可逆的に取り付けるよう、真空源を第1管腔へ動作可能に接続するステップを含む。
- 請求項145の方法はさらに、送達カテーテルを操縦係合カテーテルの第2管腔へ挿入するステップを含む。
- 請求項146の方法はさらに、心臓の内壁上の標的組織を針で穿刺するステップを含む。
- 請求項147の方法はさらに、心膜腔へ物質を投与するステップを含む。
- 請求項148の方法はさらに、標的組織から針を引き抜き、針を引き抜いたあと標的組織へ物質を投与するステップを含む。
- 請求項148の方法において、該物質は標的組織内の刺創を密閉する接着剤を含む。
- 請求項147の方法はさらに、ガイドワイヤを心臓の壁を経由して心膜腔へ挿入することにより、心膜腔へアクセスするステップを含む。
- 請求項の139の方法はさらに、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させるよう、制御装置を操作するステップを含む。
- 請求項の139の方法において、少なくとも1本の操縦ワイヤは、細長いチューブに沿った1つ以上のアンカー位置において細長いチューブに摺動係合し、該方法はさらに、少なくとも1本の操縦ワイヤが1つ以上のアンカー位置に沿って摺動させ、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させるよう制御装置を操作するステップを含む。
- 請求項の139の方法において、細長いチューブに沿った1つ以上のアンカー位置において、少なくとも1本の操縦ワイヤが、細長いチューブに摺動係合する。また、該方法はさらに、少なくとも1本の操縦ワイヤが1つ以上のアンカー位置にそって摺動し、細長いチューブを、第1方向において、操縦装置に向かう方向に屈曲させるよう制御装置を第1方向において操作するステップを含む。
- 請求項の139の方法において、細長いチューブに沿った1つ以上のアンカー位置において、少なくとも1本の操縦ワイヤが、細長いチューブに摺動係合する。また、該方法はさらに、少なくとも1本の操縦ワイヤを1つ以上のアンカー位置に沿って制御装置から離れる方向に摺動することにより最初は屈曲していた構成の細長いチューブを少なくとも部分的に伸展させるよう制御装置を第2方向に操作するステップを含む。
- 請求項の139の方法において、制御装置は、少なくとも1本の操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結した回転可能なスプールを含み、回転可能なスプールはその操作により、少なくとも1本の操縦ワイヤを回収および分配することができ、また、回転可能なスプールは回転可能なダイヤルに連結する。また、該ステップに、回転可能なダイヤルを回転させて、回転可能なスプールを回転させるステップを含み、ここで回転可能なスプールの回転は、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項の139の方法において、少なくとも1本の操縦ワイヤは2本の操縦ワイヤを含み、ここで制御装置は、少なくとも1本の操縦ワイヤに、その操縦ワイヤの近位端またはその近傍において連結する第1の回転可能なスプールを含み、また制御装置はさらに、2本の操縦ワイヤのもう1本に、その操縦ワイヤの近位端またはその近傍で連結する第2の回転可能なスプールを含み、ここで第1の回転可能なスプールと第2の回転可能なスプールは、2本の操縦ワイヤのうち1本を回収および分配するよう動作し、第1の回転可能なスプールと第2の回転可能なスプールの回転が、2本の操縦ワイヤの動きにあわせて細長いチューブを屈曲させるよう、第1の回転可能なダイヤルの回転が第1の回転可能なスプールを回転させるような形で第1の回転可能なスプールが第1の回転可能なダイヤルに連結し、また第2の回転可能なダイヤルの回転が第2の回転可能なスプールを回転させるような形で第2の回転可能なスプールが第2の回転可能なダイヤルに連結するステップを含む。
- 心臓の組織中にリードを配置する方法。この方法は以下を含む。
以下を含む操縦係合カテーテルを血管に延在させる。
近位端と遠位端、細長いチューブの長さに沿って周囲に位置づけられた第1壁を有する細長いチューブ、細長いチューブの長さに沿って、第1管腔を画定する第1壁
近位端と遠位端を有する少なくとも1本の操縦ワイヤ、操縦ワイヤの遠位端は、細長いチューブの遠位端またはその近傍で細長いチューブの第1壁に連結する。
少なくとも1本の操縦ワイヤの近位端またはその近傍において、少なくとも1本の操縦ワイヤに動作可能に連結する制御装置、細長いチューブの近位端またはその近傍において細長いチューブに沿って位置づけられた制御装置
これにより、細長いチューブの遠位端は、心臓の内壁の標的組織に接触する。
標的組織を吸い込み、心臓を囲む心膜嚢から心臓の壁を引き離すことにより、心膜嚢と心臓の壁との間の心膜腔を拡張する。
標的組織経由で心膜腔へアクセスする
ガイドワイヤの少なくとも遠位端を心膜腔へ挿入する
第1管腔を含む送達カテーテルを、細長いチューブの第1管腔へガイドワイヤの上から挿入する。ここで、送達カテーテルの第1管腔は送達カテーテルの遠位端の近くに出口を有する。
送達カテーテルの少なくとも遠位端を、標的組織をとおして心膜腔へ進める。
送達カテーテルの第1管腔の出口が、心臓の組織に隣接するよう、送達カテーテルを方向づける。
送達カテーテルの第1管腔を通ってリードを心臓の組織へ延在する。
送達カテーテルを心膜腔から引き抜く、また
ガイドワイヤを心膜腔から引き抜く - 請求項の158の方法において、送達カテーテルはさらに、操縦チャネルと、少なくとも部分的には操縦チャネルの中に位置する操縦ワイヤシステムを含む。ここで、送達カテーテルを送達カテーテルの第1管腔が心臓の組織に隣接するよう方向づけるステップには、操縦ワイヤシステムを使って送達カテーテルを方向づける作業が含まれる。
- 請求項159の方法はさらに、送達カテーテルの第2管腔を通して、レーザードップラー先端部を心膜腔へ延在させるステップを含む。
- 請求項159の方法において、リードはペーシングリードであり、また、操縦ワイヤシステムはさらに、操縦チャネルの内部において送達カテーテルに取り付けられた少なくとも2本の操縦ワイヤと、少なくとも2本の操縦ワイヤの近位端に取り付けられた制御装置を含む。制御装置は、少なくとも2本の操縦ワイヤの少なくとも1本を回収および分配することができる。
- 請求項161の方法において、操縦ワイヤシステムを使用して送達カテーテルを方向づけるステップは、制御装置を使って、少なくとも2本のうち少なくとも1本の操縦ワイヤを引き締める作業を含む。
- 請求項162の方法はさらに、第1端、第2端および、第1端から第2端まで延在する穴を有するプラグをガイドワイヤ上から標的組織へ挿入するステップを含む。
- 請求項163の方法において、このプラグの穴はガイドワイヤを引き抜いた後、自己密閉する。
- 請求項の158の方法において、少なくとも1本の操縦ワイヤは、細長いチューブに沿った1つ以上のアンカー位置において細長いチューブに摺動係合し、該方法はさらに、少なくとも1本の操縦ワイヤを1つ以上のアンカー位置に沿って摺動させ、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させるよう制御装置を操作するステップを含む。
- 請求項の158の方法において、細長いチューブに沿った1つ以上のアンカー位置において、少なくとも1本の操縦ワイヤが、細長いチューブに摺動係合する。また、該方法はさらに、少なくとも1本の操縦ワイヤが1つ以上のアンカー位置にそって摺動し、細長いチューブを、第1方向において、操縦装置に向かう方向に屈曲させるよう制御装置を第1方向において操作するステップを含む。
- 請求項の158の方法において、細長いチューブに沿った1つ以上のアンカー位置において、少なくとも1本の操縦ワイヤが、細長いチューブに摺動係合する。また、該方法はさらに、少なくとも1本の操縦ワイヤを1つ以上のアンカー位置に沿って制御装置から離れる方向に摺動することにより最初は屈曲していた構成の細長いチューブを少なくとも部分的に伸展させるよう制御装置を第2方向に操作するステップを含む。
- 請求項の158の方法において、制御装置は、少なくとも1本の操縦ワイヤにその操縦ワイヤの近位端またはその近傍において連結した回転可能なスプールを含み、回転可能なスプールはその操作により、少なくとも1本の操縦ワイヤを回収および分配することができ、また、回転可能なスプールは回転可能なダイヤルに連結する。また、該ステップは、回転可能なダイヤルを回転させて、回転可能なスプールを回転させるステップを含み、ここで回転可能なスプールの回転は、少なくとも1本の操縦ワイヤの動きに合わせて細長いチューブを屈曲させる。
- 請求項の158の方法において、少なくとも1本の操縦ワイヤは2本の操縦ワイヤを含み、ここで制御装置は、少なくとも1本の操縦ワイヤに、その操縦ワイヤの近位端またはその近傍において連結する第1の回転可能なスプールを含み、また制御装置はさらに、2本の操縦ワイヤのもう1本に、その操縦ワイヤの近位端またはその近傍で連結する第2の回転可能なスプールを含み、ここで第1の回転可能なスプールと第2の回転可能なスプール は、2本の操縦ワイヤのうち1本を回収および分配するよう動作し、第1の回転可能なスプールと第2の回転可能なスプールの回転が、2本の操縦ワイヤの動きにあわせて細長いチューブを屈曲させるよう、第1の回転可能なダイヤルの回転が第1の回転可能なスプールを回転させるような形で第1の回転可能なスプールが第1の回転可能なダイヤルに連結し、また第2の回転可能なダイヤルの回転が第2の回転可能なスプールを回転させるような形で第2の回転可能なスプールが第2の回転可能なダイヤルに連結するステップを含む。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/US2008/053061 WO2008134104A2 (en) | 2007-04-27 | 2008-02-05 | Devices, systems, and methods for accessing the epicardial surface of the heart |
| PCT/US2008/056666 WO2008134128A1 (en) | 2007-04-27 | 2008-03-12 | Devices, systems, and methods for pericardial access |
| PCT/US2008/060487 WO2008134245A1 (en) | 2007-04-27 | 2008-04-16 | Devices, systems, and methods for promotion of infarct healing and reinforcement of border zone |
| PCT/US2008/060513 WO2008134247A1 (en) | 2007-04-27 | 2008-04-16 | Devices, systems, and methods for obtaining biopsy tissue samples |
| PCT/US2008/060870 WO2008134267A2 (en) | 2007-04-27 | 2008-04-18 | Devices, systems, and methods to facilitate heart function |
| PCT/US2008/073004 WO2009099464A1 (en) | 2008-02-05 | 2008-08-13 | Steering engagement catheter devices, systems and methods |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011510786A true JP2011510786A (ja) | 2011-04-07 |
| JP2011510786A5 JP2011510786A5 (ja) | 2011-09-29 |
Family
ID=40956669
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010545853A Pending JP2011510786A (ja) | 2008-02-05 | 2008-08-13 | 操縦係合カテーテルの装置、システム、および方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9901710B2 (ja) |
| EP (1) | EP2249909A4 (ja) |
| JP (1) | JP2011510786A (ja) |
| AU (1) | AU2008349770B2 (ja) |
| CA (1) | CA2713341C (ja) |
| NZ (1) | NZ587007A (ja) |
| WO (1) | WO2009099464A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021512696A (ja) * | 2018-02-06 | 2021-05-20 | セプトゥラス エービー | 負圧式把持システム、方法およびツール |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8979828B2 (en) | 2008-07-21 | 2015-03-17 | The Spectranetics Corporation | Tapered liquid light guide |
| US9421065B2 (en) | 2008-04-02 | 2016-08-23 | The Spectranetics Corporation | Liquid light-guide catheter with optically diverging tip |
| US8372108B2 (en) * | 2009-01-16 | 2013-02-12 | Claret Medical, Inc. | Intravascular blood filter |
| JP5415925B2 (ja) * | 2009-03-02 | 2014-02-12 | オリンパス株式会社 | 内視鏡 |
| US8747297B2 (en) * | 2009-03-02 | 2014-06-10 | Olympus Corporation | Endoscopic heart surgery method |
| DE202009010388U1 (de) * | 2009-07-31 | 2010-12-09 | Düring, Klaus, Dr. | Fixiervorrichtung zur Fixierung eines Apnoe-Stents im Atemweg |
| CN102665615B (zh) * | 2009-09-22 | 2015-08-19 | 奥林巴斯株式会社 | 空间确保装置 |
| US10220134B2 (en) | 2010-04-23 | 2019-03-05 | Mark D. Wieczorek | Transseptal access device and method of use |
| US11419632B2 (en) | 2010-04-23 | 2022-08-23 | Mark D. Wieczorek, P.C. | Transseptal access device and method of use |
| US8940008B2 (en) | 2010-04-23 | 2015-01-27 | Assist Medical Llc | Transseptal access device and method of use |
| US9162038B2 (en) | 2011-04-11 | 2015-10-20 | The Spectranetics Corporation | Needle and guidewire holder |
| US20130018306A1 (en) * | 2011-07-13 | 2013-01-17 | Doron Moshe Ludwin | System for indicating catheter deflection |
| US8945146B2 (en) * | 2011-10-24 | 2015-02-03 | Medtronic, Inc. | Delivery system assemblies and associated methods for implantable medical devices |
| US8721587B2 (en) | 2011-11-17 | 2014-05-13 | Medtronic, Inc. | Delivery system assemblies and associated methods for implantable medical devices |
| US9216293B2 (en) | 2011-11-17 | 2015-12-22 | Medtronic, Inc. | Delivery system assemblies for implantable medical devices |
| US10300286B2 (en) | 2013-09-27 | 2019-05-28 | Medtronic, Inc. | Tools and assemblies thereof for implantable medical devices |
| US9526522B2 (en) * | 2013-09-27 | 2016-12-27 | Medtronic, Inc. | Interventional medical systems, tools, and assemblies |
| JP2015181485A (ja) * | 2014-03-20 | 2015-10-22 | テルモ株式会社 | カテーテル組立体 |
| US10736703B2 (en) * | 2014-05-29 | 2020-08-11 | Carnegie Mellon University | Deployable polygonal manipulator for minimally invasive surgical interventions |
| US10478620B2 (en) | 2014-08-26 | 2019-11-19 | Medtronic, Inc. | Interventional medical systems, devices, and methods of use |
| US9675798B2 (en) | 2014-08-26 | 2017-06-13 | Medtronic, Inc. | Interventional medical systems, devices, and components thereof |
| US9750931B2 (en) * | 2015-02-12 | 2017-09-05 | Medtronic, Inc. | Interventional medical systems, assemblies and methods |
| EP3256202A1 (en) * | 2015-02-13 | 2017-12-20 | Demcon Advanced Mechatronics B.V. | Method and system for connecting a lead to cardiac tissue |
| US20170043066A1 (en) * | 2015-08-12 | 2017-02-16 | TDL Innovations, LLC | Steerable Aspiration Catheter System |
| US10143823B2 (en) | 2016-04-29 | 2018-12-04 | Medtronic, Inc. | Interventional medical systems and improved assemblies thereof and associated methods of use |
| US10238864B2 (en) * | 2016-07-29 | 2019-03-26 | Medtronic, Inc. | Interventional medical systems and associated tethering assemblies and methods |
| US11478248B2 (en) * | 2017-05-12 | 2022-10-25 | National University Of Ireland, Galway | Percutaneous vascular surgical system and method |
| US20190275296A1 (en) * | 2018-03-12 | 2019-09-12 | Cardiovascular Systems, Inc. | Steerable sheath for intravascular medical devices |
| EP3781044B1 (en) * | 2018-07-09 | 2024-04-17 | AtriCure, Inc. | Pericardial access |
| CN111610624B (zh) * | 2019-02-25 | 2022-04-01 | 威强电工业电脑股份有限公司 | 具有镜头转向结构的内视镜 |
| US20220152382A1 (en) * | 2019-03-15 | 2022-05-19 | Biotronik Se & Co. Kg | Catheter Device for Implanting a Medical Device |
| US12089875B2 (en) * | 2019-07-09 | 2024-09-17 | Atricure, Inc. | Pericardial access |
| US20210138239A1 (en) | 2019-09-25 | 2021-05-13 | Swift Sync, Llc | Transvenous Intracardiac Pacing Catheter |
| US12151099B2 (en) | 2021-01-20 | 2024-11-26 | Swift Sync, Inc. | Transvenous intracardiac pacing catheter having improved leads |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003535621A (ja) * | 2000-02-15 | 2003-12-02 | イーバ コーポレイション | 送達カテーテル・アセンブリ、および手術処置中に手術用部品を血管に固定する方法 |
| JP2006506195A (ja) * | 2002-11-19 | 2006-02-23 | メドトロニック・インコーポレーテッド | 埋め込み可能な医療デバイス用の多腔ボディ |
Family Cites Families (60)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3583404A (en) | 1969-06-23 | 1971-06-08 | Kendall & Co | Nonblocking catheter |
| US3630207A (en) | 1969-08-08 | 1971-12-28 | Cutter Lab | Pericardial catheter |
| US4946457A (en) | 1987-12-03 | 1990-08-07 | Dimed, Incorporated | Defibrillator system with cardiac leads and method for transvenous implantation |
| US4991578A (en) * | 1989-04-04 | 1991-02-12 | Siemens-Pacesetter, Inc. | Method and system for implanting self-anchoring epicardial defibrillation electrodes |
| US6413234B1 (en) * | 1990-02-02 | 2002-07-02 | Ep Technologies, Inc. | Assemblies for creating compound curves in distal catheter regions |
| US6033378A (en) * | 1990-02-02 | 2000-03-07 | Ep Technologies, Inc. | Catheter steering mechanism |
| US5195968A (en) * | 1990-02-02 | 1993-03-23 | Ingemar Lundquist | Catheter steering mechanism |
| US5292332A (en) | 1992-07-27 | 1994-03-08 | Lee Benjamin I | Methods and device for percutanceous sealing of arterial puncture sites |
| US5715817A (en) | 1993-06-29 | 1998-02-10 | C.R. Bard, Inc. | Bidirectional steering catheter |
| CA2472373C (en) | 1993-07-19 | 2009-10-13 | Angiotech Pharmaceuticals, Inc. | Combination of paclitaxel and a polymer |
| US5407430A (en) * | 1994-03-21 | 1995-04-18 | Peters; Michael J. | Intravenous catheter |
| US6398776B1 (en) | 1996-06-03 | 2002-06-04 | Terumo Kabushiki Kaisha | Tubular medical device |
| US6733515B1 (en) | 1997-03-12 | 2004-05-11 | Neomend, Inc. | Universal introducer |
| US6200303B1 (en) | 1997-04-30 | 2001-03-13 | Beth Israel Deaconess Medical Center, Inc. | Method and kit for transvenously accessing the pericardial space via the right atrium |
| JPH1176403A (ja) * | 1997-07-11 | 1999-03-23 | Olympus Optical Co Ltd | 外科用処置具 |
| US6123699A (en) | 1997-09-05 | 2000-09-26 | Cordis Webster, Inc. | Omni-directional steerable catheter |
| US5972013A (en) | 1997-09-19 | 1999-10-26 | Comedicus Incorporated | Direct pericardial access device with deflecting mechanism and method |
| US6592552B1 (en) | 1997-09-19 | 2003-07-15 | Cecil C. Schmidt | Direct pericardial access device and method |
| US6340356B1 (en) | 1997-09-23 | 2002-01-22 | NAVIA JOSé ANTONIO | Intraluminal catheter with expandable tubular open-walled element |
| US6749617B1 (en) | 1997-11-04 | 2004-06-15 | Scimed Life Systems, Inc. | Catheter and implants for the delivery of therapeutic agents to tissues |
| US6113611A (en) | 1998-05-28 | 2000-09-05 | Advanced Vascular Technologies, Llc | Surgical fastener and delivery system |
| US6544215B1 (en) | 1998-10-02 | 2003-04-08 | Scimed Life Systems, Inc. | Steerable device for introducing diagnostic and therapeutic apparatus into the body |
| US6338345B1 (en) | 1999-04-07 | 2002-01-15 | Endonetics, Inc. | Submucosal prosthesis delivery device |
| US6773418B1 (en) | 1999-08-18 | 2004-08-10 | Iotek, Inc. | Device and method for delivery of agents to the female reproductive tract |
| US6626930B1 (en) | 1999-10-21 | 2003-09-30 | Edwards Lifesciences Corporation | Minimally invasive mitral valve repair method and apparatus |
| US6613062B1 (en) | 1999-10-29 | 2003-09-02 | Medtronic, Inc. | Method and apparatus for providing intra-pericardial access |
| US7842068B2 (en) | 2000-12-07 | 2010-11-30 | Integrated Vascular Systems, Inc. | Apparatus and methods for providing tactile feedback while delivering a closure device |
| GB2359024A (en) | 2000-02-09 | 2001-08-15 | Anson Medical Ltd | Fixator for arteries |
| US6589269B2 (en) * | 2000-02-24 | 2003-07-08 | Loma Linda University Medical Center | Patch and glue delivery system for closing tissue openings during surgery |
| US7373197B2 (en) | 2000-03-03 | 2008-05-13 | Intramedical Imaging, Llc | Methods and devices to expand applications of intraoperative radiation probes |
| US20040167558A1 (en) | 2000-07-26 | 2004-08-26 | Igo Stephen R. | Method and apparatus for accessing the pericardial space |
| CA2441883A1 (en) | 2000-09-01 | 2002-03-07 | Onux Medical, Inc. | Multi-fastener surgical apparatus and method |
| US6663633B1 (en) | 2000-10-25 | 2003-12-16 | Pierson, Iii Raymond H. | Helical orthopedic fixation and reduction device, insertion system, and associated methods |
| US20040018228A1 (en) | 2000-11-06 | 2004-01-29 | Afmedica, Inc. | Compositions and methods for reducing scar tissue formation |
| US6692458B2 (en) | 2000-12-19 | 2004-02-17 | Edwards Lifesciences Corporation | Intra-pericardial drug delivery device with multiple balloons and method for angiogenesis |
| US6890295B2 (en) * | 2002-10-31 | 2005-05-10 | Medtronic, Inc. | Anatomical space access tools and methods |
| MXPA03007665A (es) | 2001-02-26 | 2004-03-16 | Univ Duke | Polimeros dendriticos novedosos y sus usos biomedicos. |
| US20030009145A1 (en) | 2001-03-23 | 2003-01-09 | Struijker-Boudier Harry A.J. | Delivery of drugs from sustained release devices implanted in myocardial tissue or in the pericardial space |
| US20020173803A1 (en) | 2001-05-01 | 2002-11-21 | Stephen Ainsworth | Self-closing surgical clip for tissue |
| US6776784B2 (en) | 2001-09-06 | 2004-08-17 | Core Medical, Inc. | Clip apparatus for closing septal defects and methods of use |
| US20060052821A1 (en) | 2001-09-06 | 2006-03-09 | Ovalis, Inc. | Systems and methods for treating septal defects |
| US6755812B2 (en) | 2001-12-11 | 2004-06-29 | Cardiac Pacemakers, Inc. | Deflectable telescoping guide catheter |
| EP1494611A2 (en) | 2002-03-11 | 2005-01-12 | John L. Wardle | Surgical coils and methods of deploying |
| US6988987B2 (en) * | 2002-03-18 | 2006-01-24 | Olympus Corporation | Guide tube |
| US7029468B2 (en) | 2002-06-25 | 2006-04-18 | Enpath Medical, Inc. | Catheter assembly with side wall exit lumen and method therefor |
| US20050054994A1 (en) | 2002-09-25 | 2005-03-10 | Iulian Cioanta | Catheters with suction capability and related methods and systems for obtaining biosamples in vivo |
| US20050261673A1 (en) | 2003-01-15 | 2005-11-24 | Medtronic, Inc. | Methods and apparatus for accessing and stabilizing an area of the heart |
| CA2516559C (en) | 2003-02-21 | 2016-09-27 | Electro-Cat, Llc | System and method for measuring cross-sectional areas and pressure gradients in luminal organs |
| US7942897B2 (en) | 2003-07-10 | 2011-05-17 | Boston Scientific Scimed, Inc. | System for closing an opening in a body cavity |
| FR2862521B1 (fr) | 2003-11-24 | 2006-09-22 | Juan Carlos Chachques | Catheter de diagnostic et d'injection, notamment pour application cardiologique a coeur battant |
| US7186214B2 (en) | 2004-02-12 | 2007-03-06 | Medtronic, Inc. | Instruments and methods for accessing an anatomic space |
| AU2005228956B2 (en) * | 2004-03-23 | 2011-08-18 | Boston Scientific Limited | In-vivo visualization system |
| WO2005113061A1 (en) | 2004-05-19 | 2005-12-01 | The Board Of Trustees, The Leland Stanford Junior University | Devices and methods for treating cardiac pathologies |
| US7860555B2 (en) * | 2005-02-02 | 2010-12-28 | Voyage Medical, Inc. | Tissue visualization and manipulation system |
| US20060207607A1 (en) | 2005-02-08 | 2006-09-21 | Mark Hirotsuka | System and method for percutaneous palate remodeling |
| US20060270975A1 (en) | 2005-05-31 | 2006-11-30 | Prorhythm, Inc. | Steerable catheter |
| US20070010793A1 (en) | 2005-06-23 | 2007-01-11 | Cardiac Pacemakers, Inc. | Method and system for accessing a pericardial space |
| WO2007123770A2 (en) * | 2006-03-31 | 2007-11-01 | Automated Medical Instruments, Inc. | System and method for advancing, orienting, and immobilizing on internal body tissue a catheter or therapeutic device |
| EP2142071B1 (en) * | 2007-04-20 | 2018-04-04 | Cook Medical Technologies LLC | Steerable overtube |
| JP5174891B2 (ja) * | 2007-04-27 | 2013-04-03 | シーヴィ デヴァイシズ,エルエルシー | 心臓の心外膜表面にアクセスするための装置、システム、および方法 |
-
2008
- 2008-08-13 CA CA2713341A patent/CA2713341C/en active Active
- 2008-08-13 EP EP08797788.0A patent/EP2249909A4/en not_active Withdrawn
- 2008-08-13 AU AU2008349770A patent/AU2008349770B2/en not_active Ceased
- 2008-08-13 WO PCT/US2008/073004 patent/WO2009099464A1/en active Application Filing
- 2008-08-13 JP JP2010545853A patent/JP2011510786A/ja active Pending
- 2008-08-13 NZ NZ587007A patent/NZ587007A/xx not_active IP Right Cessation
- 2008-08-13 US US12/866,433 patent/US9901710B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003535621A (ja) * | 2000-02-15 | 2003-12-02 | イーバ コーポレイション | 送達カテーテル・アセンブリ、および手術処置中に手術用部品を血管に固定する方法 |
| JP2006506195A (ja) * | 2002-11-19 | 2006-02-23 | メドトロニック・インコーポレーテッド | 埋め込み可能な医療デバイス用の多腔ボディ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021512696A (ja) * | 2018-02-06 | 2021-05-20 | セプトゥラス エービー | 負圧式把持システム、方法およびツール |
| JP7389489B2 (ja) | 2018-02-06 | 2023-11-30 | セプトゥラス エービー | 負圧式把持システム、方法およびツール |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2713341C (en) | 2016-09-27 |
| AU2008349770A1 (en) | 2009-08-13 |
| EP2249909A4 (en) | 2013-06-19 |
| US20110144572A1 (en) | 2011-06-16 |
| CA2713341A1 (en) | 2009-08-13 |
| WO2009099464A1 (en) | 2009-08-13 |
| AU2008349770B2 (en) | 2014-10-16 |
| NZ587007A (en) | 2013-03-28 |
| EP2249909A1 (en) | 2010-11-17 |
| US9901710B2 (en) | 2018-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11013892B2 (en) | Steering engagement catheter devices, systems, and methods | |
| US9901710B2 (en) | Steering engagement catheter devices, systems, and methods | |
| US8876776B2 (en) | Engagement catheter systems and devices and methods of using the same | |
| US9955999B2 (en) | Systems, devices, and methods for transeptal atrial puncture using an engagement catheter platform | |
| US9050064B2 (en) | Systems for engaging a bodily tissue and methods of using the same | |
| US20210316119A1 (en) | Engagement catheter devices, systems, and methods to use the same under suctional tissue engagement | |
| US8211084B2 (en) | Devices, systems, and methods for accessing the epicardial surface of the heart | |
| US20120191181A1 (en) | Systems and methods for localization of a puncture site relative to a mammalian tissue of interest | |
| US20110224720A1 (en) | Devices, systems, and methods for closing a hole in cardiac tissue | |
| CA2684605C (en) | Devices, systems, and methods for pericardial access |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110809 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130104 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130110 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130604 |