JP2011237987A - 操作入力装置およびマニピュレータシステム - Google Patents
操作入力装置およびマニピュレータシステム Download PDFInfo
- Publication number
- JP2011237987A JP2011237987A JP2010108344A JP2010108344A JP2011237987A JP 2011237987 A JP2011237987 A JP 2011237987A JP 2010108344 A JP2010108344 A JP 2010108344A JP 2010108344 A JP2010108344 A JP 2010108344A JP 2011237987 A JP2011237987 A JP 2011237987A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- display
- input device
- operation input
- head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 0 CC1*CCC1 Chemical compound CC1*CCC1 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G3/00—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes
- G09G3/001—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes using specific devices not provided for in groups G09G3/02 - G09G3/36, e.g. using an intermediate record carrier such as a film slide; Projection systems; Display of non-alphanumerical information, solely or in combination with alphanumerical information, e.g. digital display on projected diapositive as background
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/02—Hand grip control means
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/012—Head tracking input arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2048—Tracking techniques using an accelerometer or inertia sensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
- A61B2034/2057—Details of tracking cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
- A61B2090/3612—Image-producing devices, e.g. surgical cameras with images taken automatically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/368—Correlation of different images or relation of image positions in respect to the body changing the image on a display according to the operator's position
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B2090/502—Headgear, e.g. helmet, spectacles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/35—Nc in input of data, input till input file format
- G05B2219/35482—Eyephone, head-mounted 2-D or 3-D display, also voice and other control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45117—Medical, radio surgery manipulator
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Heart & Thoracic Surgery (AREA)
- Biomedical Technology (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Mechanical Engineering (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Optics & Photonics (AREA)
- Biophysics (AREA)
- Computer Hardware Design (AREA)
- Manipulator (AREA)
- User Interface Of Digital Computer (AREA)
- Position Input By Displaying (AREA)
Abstract
【解決手段】ディスプレイ5と、該ディスプレイ5上に表示された表示物2を操作する操作部7と、操作者Bの頭部Cに装着される頭部装着部6と、該頭部装着部6または操作部7の一方に対する他方の相対位置および相対姿勢を検出する相対位置センサ9,12と、該相対位置センサ9,12により検出された相対位置および相対姿勢の変化に基づいてディスプレイ5内に表示されている表示物2を作動させる制御部8とを備える操作入力装置1を提供する。
【選択図】図1
Description
本発明は、ディスプレイと、該ディスプレイ上に表示された表示物を操作する操作部と、操作者の頭部に装着される頭部装着部と、該頭部装着部または前記操作部の一方に対する他方の相対位置および相対姿勢を検出する相対位置センサと、該相対位置センサにより検出された相対位置および相対姿勢の変化に基づいて前記ディスプレイ内に表示されている表示物を作動させる制御部とを備える操作入力装置を提供する。
このようにすることで、頭部装着部を装着した操作者は、眼前に配置されたディスプレイに表示された表示物を見ながら操作することができる。ディスプレイが操作者の頭部に装着されることにより、操作者の移動を可能にすることができる。
このようにすることで、頭部装着部または操作部の一方に設けられた指標を、他方に設けられた撮像部によって撮影することにより、頭部装着部と操作部との相対位置を直接的に検出することができる。頭部装着部に固定したディスプレイを、操作者の眼前に置くことで、操作者の視野を基準とした視線座標系での操作部の相対位置・姿勢情報が取得できるため、ディスプレイ上に表示される表示物と、それを表示する視線座標系との変換が省略あるいは容易になる。これにより、演算量を低減して高速処理が可能となると共に直感的な操作が可能となる。
この場合は、前記指標が同一平面上に配置されない少なくとも4箇所に設けられていればよい。
このようにすることで、4箇所の指標の全体的な位置の変化によって頭部装着部と操作部との相対姿勢の変化を検出し、4箇所の指標の指標間の位置の変化によって頭部装着部と操作部との相対位置の変化を検出することができる。
また、上記発明においては、前記撮像部を2以上備えていてもよい。
この場合は、前記指標が同一直線上に配置されない少なくとも3箇所に設けられていればよい。
このようにすることで、3箇所の指標の全体的な位置の変化によって頭部装着部と操作部との相対姿勢の変化を検出し、3箇所の指標の指標間の位置の変化によって頭部装着部と操作部との相対位置の変化を検出することができる。
また、上記発明においては、前記相対位置センサが、操作者の視線を取得可能な視線検出センサを備えていてもよい。このようにすることで、より正確な操作者の視線と操作部の相対位置が取得できる。
このようにすることで、空間センサが備えられた頭部装着部または操作部の空間座標系における変位情報と、頭部装着部と操作部との相対位置および相対姿勢とに基づいてディスプレイ内に表示されている表示物の動作の精度を向上することができる。
また、頭部装着部と操作部との間の相対位置あるいは相対姿勢の変化が、頭部装着部あるいは操作部のいずれを変位させたために発生したものであるのかを判別でき、制御部による表示物の作動をより正確に制御することが可能となる。
このようにすることで、空間座標系に固定されたディスプレイに備えられたディスプレイ用指標を撮像部によって撮影して、撮像部に対するディスプレイの角度や位置を検出することができる。これにより、操作者がディスプレイに対して移動しても、表示物の角度や方向を調節することができ、操作者の視線座標系に対して、表示物の座標を常に一定に保つことが可能となる。
このようにすることで、観察装置により取得された表示物であるマニピュレータの映像がディスプレイに表示され、操作入力装置に備えられた操作部と頭部装着部との相対位置および相対姿勢の変化によって制御部がマニピュレータを作動させる。これにより、操作部の可動範囲が他の障害物によって制限されてしまうのを防止ししながら、マニピュレータによる処置を行うことができる。
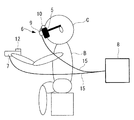
本実施形態に係るマニピュレータシステム1は、図1に示されるように、患者Aの体内に挿入されるマニピュレータ2と、該マニピュレータ2の映像を撮影する内視鏡(観察装置)3と、本実施形態に係る操作入力装置4とを備えている。
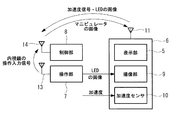
また、HMD6は、図2に示されるように、撮像部9により撮影した画像信号および加速度センサ10により検出したHMD6の空間座標系における加速度信号を無線送信する送信部11を備えている。
また、制御部8は、HMD6から無線送信されてきた画像信号および加速度信号と、操作部7から無線送信されてきた操作入力信号を受信部14により受信して、マニピュレータ2を動作させるための制御信号を生成し、生成した制御信号に基づいてマニピュレータ2のモータ2aを作動させ、マニピュレータ2を移動させあるいは作動状態を変化させるようになっている。また、これらの制御信号に基づいて内視鏡3のモータ3aを作動させ、内視鏡3を移動させあるいは作動状態を変化させることもできる。
また、HMD6に操作者の視線を取得できる視線検出センサ18を取り付けることで、より正確な操作者の視線と操作部の相対位置が取得できる。
また、撮像部9を2つ設けることで、操作部7もしくはHMD6に取り付けるLEDを3点として相対位置を取得してもよい。この場合、LEDつまり指標は同一直線上に配置されない位置に配置されて固定される。また、指標は、少なくとも3箇所あればよい。
また、加速度センサ10からなる空間センサをHMD6に設けることにしたが、これに代えて、操作部7に設けることにしてもよい。
また、加速度センサ10をHMD6および操作部7の両方に設けた場合、相対位置を撮像部9と少なくとも1つの指標とから検出し、相対姿勢を加速度センサ10により取得してもよい。
また、指標は5個以上設けることにしてもよい。
また、本実施形態においては、空間センサとして加速度センサ10を例示したが、これに代えてジャイロセンサや速度センサを採用してもよい。また、これらの組み合わせでもよい。
B 操作者
C 頭部
1 マニピュレータシステム
2 マニピュレータ(表示物)
3 内視鏡(観察装置)
4 操作入力装置
5 表示部(ディスプレイ)
6 HMD(頭部装着型ディスプレイ、頭部装着部)
7 操作部
8 制御部
9 撮像部(相対位置センサ)
10 加速度センサ(空間センサ)
12 LED(指標、相対位置センサ)
15 配線
16 ディスプレイ
17 指標(ディスプレイ用指標)
18 視線検出センサ
Claims (11)
- ディスプレイと、
該ディスプレイ上に表示された表示物を操作する操作部と、
操作者の頭部に装着される頭部装着部と、
該頭部装着部または前記操作部の一方に対する他方の相対位置および相対姿勢を検出する相対位置センサと、
該相対位置センサにより検出された相対位置および相対姿勢の変化に基づいて前記ディスプレイ内に表示されている表示物を作動させる制御部とを備える操作入力装置。 - 前記ディスプレイは、前記頭部装着部が前記操作者の頭部に装着されたときに前記操作者の眼前に配置されるように、前記頭部装着部に固定されている請求項1に記載の操作入力装置。
- 前記相対位置センサが、前記頭部装着部または前記操作部の一方に設けられた指標と、前記頭部装着部または前記操作部の他方に設けられ、前記指標を撮影する撮像部とを備える請求項1に記載の操作入力装置。
- 前記撮像部を1つ備える請求項3に記載の操作入力装置。
- 前記指標が同一平面上に配置されない少なくとも4箇所に設けられている請求項4に記載の操作入力装置。
- 前記撮像部を2以上備える請求項3に記載の操作入力装置。
- 前記指標が同一直線上に配置されない少なくとも3箇所に設けられている請求項6に記載の操作入力装置。
- 前記相対位置センサが、操作者の視線を取得可能な視線検出センサを備える請求項1に記載の操作入力装置。
- 前記頭部装着部または前記操作部の少なくとも一方に、その空間座標系における変位情報を検出する空間センサを備える請求項1に記載の操作入力装置。
- 前記ディスプレイが、空間座標系に固定されるとともに、前記頭部装着部または前記操作部の前記他方に設けられた前記撮像部により撮影されるディスプレイ用指標を備える請求項3に記載の操作入力装置。
- 請求項1から請求項10のいずれかに記載の操作入力装置と、
前記表示物であるマニピュレータと、
前記ディスプレイに表示する前記表示物の映像を取得する観察装置とを備えるマニピュレータシステム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010108344A JP5704833B2 (ja) | 2010-05-10 | 2010-05-10 | 操作入力装置およびマニピュレータシステム |
| CN201180021874.XA CN102869310B (zh) | 2010-05-10 | 2011-03-04 | 操作输入装置以及机械手系统 |
| EP11780422.9A EP2570890A4 (en) | 2010-05-10 | 2011-03-04 | OPERATING ENTRY AND MANIPULATOR SYSTEM |
| PCT/JP2011/055050 WO2011142165A1 (ja) | 2010-05-10 | 2011-03-04 | 操作入力装置およびマニピュレータシステム |
| US13/669,801 US9361818B2 (en) | 2010-05-10 | 2012-11-06 | Operation input device and manipulator system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010108344A JP5704833B2 (ja) | 2010-05-10 | 2010-05-10 | 操作入力装置およびマニピュレータシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011237987A true JP2011237987A (ja) | 2011-11-24 |
| JP5704833B2 JP5704833B2 (ja) | 2015-04-22 |
Family
ID=44914223
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010108344A Expired - Fee Related JP5704833B2 (ja) | 2010-05-10 | 2010-05-10 | 操作入力装置およびマニピュレータシステム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9361818B2 (ja) |
| EP (1) | EP2570890A4 (ja) |
| JP (1) | JP5704833B2 (ja) |
| CN (1) | CN102869310B (ja) |
| WO (1) | WO2011142165A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013240415A (ja) * | 2012-05-18 | 2013-12-05 | Olympus Corp | 手術支援装置 |
| JP2016519585A (ja) * | 2013-03-15 | 2016-07-07 | エスアールアイ インターナショナルSRI International | 超精巧外科システム |
| WO2016190057A1 (ja) * | 2015-05-22 | 2016-12-01 | コニカミノルタ株式会社 | ウェアラブル電子機器およびウェアラブル電子機器のジェスチャー検知方法 |
| JP2017517297A (ja) * | 2014-04-24 | 2017-06-29 | コヴィディエン リミテッド パートナーシップ | ロボットインターフェース位置調整決定システムおよび方法 |
| JP2018511359A (ja) * | 2015-02-20 | 2018-04-26 | コヴィディエン リミテッド パートナーシップ | 手術室及び手術部位認識 |
| WO2018143360A1 (ja) * | 2017-02-03 | 2018-08-09 | 良夫 川又 | 相対位置検出システム及び画像表示システム |
| JP2019506922A (ja) * | 2015-12-29 | 2019-03-14 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | ロボット手術のために仮想現実デバイスを使用するシステム、コントローラ、及び方法 |
| WO2024004941A1 (ja) * | 2022-06-27 | 2024-01-04 | 川崎重工業株式会社 | 手術支援システムおよび手術支援システムの制御方法 |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9943372B2 (en) | 2005-04-18 | 2018-04-17 | M.S.T. Medical Surgery Technologies Ltd. | Device having a wearable interface for improving laparoscopic surgery and methods for use thereof |
| US9259289B2 (en) | 2011-05-13 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Estimation of a position and orientation of a frame used in controlling movement of a tool |
| US9204939B2 (en) | 2011-08-21 | 2015-12-08 | M.S.T. Medical Surgery Technologies Ltd. | Device and method for assisting laparoscopic surgery—rule based approach |
| US11561762B2 (en) * | 2011-08-21 | 2023-01-24 | Asensus Surgical Europe S.A.R.L. | Vocally actuated surgical control system |
| US10866783B2 (en) | 2011-08-21 | 2020-12-15 | Transenterix Europe S.A.R.L. | Vocally activated surgical control system |
| US9757206B2 (en) | 2011-08-21 | 2017-09-12 | M.S.T. Medical Surgery Technologies Ltd | Device and method for assisting laparoscopic surgery—rule based approach |
| US9795282B2 (en) | 2011-09-20 | 2017-10-24 | M.S.T. Medical Surgery Technologies Ltd | Device and method for maneuvering endoscope |
| JP5993127B2 (ja) * | 2011-10-25 | 2016-09-14 | オリンパス株式会社 | 頭部装着型表示装置、情報端末、プログラム、情報記憶媒体、画像処理システム、頭部装着型表示装置の制御方法及び情報端末の制御方法 |
| IL221863A (en) | 2012-09-10 | 2014-01-30 | Elbit Systems Ltd | Digital video photography system when analyzing and displaying |
| CN103699209A (zh) * | 2012-09-27 | 2014-04-02 | 联想(北京)有限公司 | 一种输入设备 |
| US9066323B2 (en) | 2012-11-15 | 2015-06-23 | Hewlett-Packard Development Company, L.P. | Ad Hoc network connection |
| JP5549749B1 (ja) * | 2013-01-16 | 2014-07-16 | 株式会社安川電機 | ロボット教示システム、ロボット教示プログラムの生成方法および教示ツール |
| BR112015022187A2 (pt) | 2013-03-14 | 2017-07-18 | Stanford Res Inst Int | ferramentas cirúrgicas minimamente invasivas |
| US20150187198A1 (en) * | 2013-12-27 | 2015-07-02 | Aaron G. Silverberg | Orientation Measurement And Guidance Of Manually Positioned Objects |
| WO2016005988A1 (en) * | 2014-07-10 | 2016-01-14 | M.S.T. Medical Surgery Technologies Ltd. | Improved interface for laparoscopic surgeries - movement gestures |
| KR101645392B1 (ko) | 2014-08-13 | 2016-08-02 | 주식회사 고영테크놀러지 | 트랙킹 시스템 및 이를 이용한 트랙킹 방법 |
| JP6788327B2 (ja) * | 2015-02-27 | 2020-11-25 | 株式会社ソニー・インタラクティブエンタテインメント | 表示制御プログラム、表示制御装置、及び表示制御方法 |
| KR20170139655A (ko) * | 2015-04-23 | 2017-12-19 | 에스알아이 인터내셔널 | 초정교 수술 시스템 사용자 인터페이스 디바이스 |
| US10828115B2 (en) | 2015-07-23 | 2020-11-10 | Sri International | Robotic arm and robotic surgical system |
| ITUB20153938A1 (it) * | 2015-09-28 | 2017-03-28 | Marco Raoul Marini | Dispositivo per endoscopia |
| JP6835850B2 (ja) * | 2015-12-29 | 2021-02-24 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 手術ロボットの制御のためのシステム、制御ユニット、及び方法 |
| WO2017145340A1 (ja) * | 2016-02-25 | 2017-08-31 | オリンパス株式会社 | マニピュレータシステムとその作動方法 |
| CN105868569A (zh) * | 2016-04-15 | 2016-08-17 | 福建水立方三维数字科技有限公司 | 一种产科护理虚拟仿真平台及其操作方法 |
| CN106175650A (zh) * | 2016-06-29 | 2016-12-07 | 上海波鸿医疗器械科技有限公司 | 一种穿戴型腔镜虚拟显示系统 |
| WO2018013979A1 (en) * | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Secondary instrument control in a computer-assisted teleoperated system |
| CN106137399B (zh) | 2016-08-31 | 2018-09-04 | 北京术锐技术有限公司 | 一种基于嵌入式计算机的手术机器人集成控制系统 |
| EP3531953A1 (en) * | 2016-10-25 | 2019-09-04 | Novartis AG | Medical spatial orientation system |
| CN106781972A (zh) * | 2016-12-27 | 2017-05-31 | 泉州医学高等专科学校 | 基于vr技术的胎儿平产接生模拟系统及方法 |
| JP6823018B2 (ja) * | 2018-08-03 | 2021-01-27 | ファナック株式会社 | 協調動作支援装置 |
| DE102018125592A1 (de) * | 2018-10-16 | 2020-04-16 | Karl Storz Se & Co. Kg | Steuerungsanordnung, Verfahren zur Steuerung einer Bewegung eines Roboterarms und Behandlungsvorrichtung mit Steuerungsanordnung |
| CN109498162B (zh) * | 2018-12-20 | 2023-11-03 | 深圳市精锋医疗科技股份有限公司 | 提升沉浸感的主操作台及手术机器人 |
| US11864841B2 (en) | 2019-12-31 | 2024-01-09 | Carl Zeiss Meditec Ag | Method of operating a surgical microscope and surgical microscope |
| US11409091B2 (en) * | 2019-12-31 | 2022-08-09 | Carl Zeiss Meditec Ag | Method of operating a surgical microscope and surgical microscope |
| US11607287B2 (en) | 2019-12-31 | 2023-03-21 | Carl Zeiss Meditec Ag | Method of operating a surgical microscope and surgical microscope |
| CN112822480B (zh) * | 2020-12-31 | 2022-05-17 | 青岛小鸟看看科技有限公司 | Vr系统及其定位追踪方法 |
| US12469108B2 (en) * | 2021-10-22 | 2025-11-11 | Olympus Medical Systems Corp. | Endoscope system and processor unit performing direction-based image processing |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07124165A (ja) * | 1993-11-02 | 1995-05-16 | Olympus Optical Co Ltd | 視線検出によるマニピュレータ制御システム |
| JPH10127565A (ja) * | 1996-10-29 | 1998-05-19 | Olympus Optical Co Ltd | 体腔内処置観察システム |
| JP2000102036A (ja) * | 1998-09-22 | 2000-04-07 | Mr System Kenkyusho:Kk | 複合現実感提示システム、複合現実感提示方法、マン・マシーンインタフェース装置、およびマン・マシーンインタフェース方法 |
| JP2000279425A (ja) * | 1999-03-30 | 2000-10-10 | Olympus Optical Co Ltd | ナビゲーション装置 |
| JP2002269567A (ja) * | 2001-03-13 | 2002-09-20 | Canon Inc | 動き検出方法 |
| JP2005500096A (ja) * | 2001-06-13 | 2005-01-06 | ヴォリューム・インタラクションズ・プライヴェート・リミテッド | ガイドシステム |
| JP2008500624A (ja) * | 2004-05-24 | 2008-01-10 | 3ディー フォー オール シャミタステクニカイ フェリャズト ケーエフティー | 仮想3次元空間内で動作するシステム及び方法と視覚化システムを介してオペレーションを選択するシステム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07110735A (ja) | 1993-10-14 | 1995-04-25 | Nippon Telegr & Teleph Corp <Ntt> | 装着型ペン入力装置 |
| JP3610110B2 (ja) | 1995-02-23 | 2005-01-12 | オリンパス株式会社 | 医療用マニピュレータ |
| CN1373969A (zh) * | 1999-07-13 | 2002-10-09 | 瑟吉维森有限公司 | 立体视频观察和图象放大系统 |
| JP3273038B2 (ja) * | 1999-11-17 | 2002-04-08 | 株式会社ナムコ | 仮想体験型ゲーム装置 |
| WO2001056007A1 (en) * | 2000-01-28 | 2001-08-02 | Intersense, Inc. | Self-referenced tracking |
| CN1676286A (zh) * | 2004-04-02 | 2005-10-05 | 李朝辉 | 生物信息随动即时示教控制机器人 |
| US7763015B2 (en) * | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US7907166B2 (en) * | 2005-12-30 | 2011-03-15 | Intuitive Surgical Operations, Inc. | Stereo telestration for robotic surgery |
| GB2464092A (en) * | 2008-09-25 | 2010-04-07 | Prosurgics Ltd | Surgical mechanism control system |
-
2010
- 2010-05-10 JP JP2010108344A patent/JP5704833B2/ja not_active Expired - Fee Related
-
2011
- 2011-03-04 WO PCT/JP2011/055050 patent/WO2011142165A1/ja not_active Ceased
- 2011-03-04 EP EP11780422.9A patent/EP2570890A4/en not_active Withdrawn
- 2011-03-04 CN CN201180021874.XA patent/CN102869310B/zh not_active Expired - Fee Related
-
2012
- 2012-11-06 US US13/669,801 patent/US9361818B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07124165A (ja) * | 1993-11-02 | 1995-05-16 | Olympus Optical Co Ltd | 視線検出によるマニピュレータ制御システム |
| JPH10127565A (ja) * | 1996-10-29 | 1998-05-19 | Olympus Optical Co Ltd | 体腔内処置観察システム |
| JP2000102036A (ja) * | 1998-09-22 | 2000-04-07 | Mr System Kenkyusho:Kk | 複合現実感提示システム、複合現実感提示方法、マン・マシーンインタフェース装置、およびマン・マシーンインタフェース方法 |
| JP2000279425A (ja) * | 1999-03-30 | 2000-10-10 | Olympus Optical Co Ltd | ナビゲーション装置 |
| JP2002269567A (ja) * | 2001-03-13 | 2002-09-20 | Canon Inc | 動き検出方法 |
| JP2005500096A (ja) * | 2001-06-13 | 2005-01-06 | ヴォリューム・インタラクションズ・プライヴェート・リミテッド | ガイドシステム |
| JP2008500624A (ja) * | 2004-05-24 | 2008-01-10 | 3ディー フォー オール シャミタステクニカイ フェリャズト ケーエフティー | 仮想3次元空間内で動作するシステム及び方法と視覚化システムを介してオペレーションを選択するシステム |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10245111B2 (en) | 2012-05-18 | 2019-04-02 | Olympus Corporation | Operation support device |
| CN104284637A (zh) * | 2012-05-18 | 2015-01-14 | 奥林巴斯株式会社 | 手术辅助装置 |
| JP2013240415A (ja) * | 2012-05-18 | 2013-12-05 | Olympus Corp | 手術支援装置 |
| JP2016519585A (ja) * | 2013-03-15 | 2016-07-07 | エスアールアイ インターナショナルSRI International | 超精巧外科システム |
| US10383699B2 (en) | 2013-03-15 | 2019-08-20 | Sri International | Hyperdexterous surgical system |
| US10376337B2 (en) | 2013-03-15 | 2019-08-13 | Sri International | Hyperdexterous surgical system |
| US10299883B2 (en) | 2013-03-15 | 2019-05-28 | Sri International | Hyperdexterous surgical system |
| JP2017517297A (ja) * | 2014-04-24 | 2017-06-29 | コヴィディエン リミテッド パートナーシップ | ロボットインターフェース位置調整決定システムおよび方法 |
| JP2018511359A (ja) * | 2015-02-20 | 2018-04-26 | コヴィディエン リミテッド パートナーシップ | 手術室及び手術部位認識 |
| JP2020049296A (ja) * | 2015-02-20 | 2020-04-02 | コヴィディエン リミテッド パートナーシップ | 手術室及び手術部位認識 |
| US10908681B2 (en) | 2015-02-20 | 2021-02-02 | Covidien Lp | Operating room and surgical site awareness |
| JP2021100690A (ja) * | 2015-02-20 | 2021-07-08 | コヴィディエン リミテッド パートナーシップ | 手術室及び手術部位認識 |
| WO2016190057A1 (ja) * | 2015-05-22 | 2016-12-01 | コニカミノルタ株式会社 | ウェアラブル電子機器およびウェアラブル電子機器のジェスチャー検知方法 |
| JP2019506922A (ja) * | 2015-12-29 | 2019-03-14 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | ロボット手術のために仮想現実デバイスを使用するシステム、コントローラ、及び方法 |
| WO2018143360A1 (ja) * | 2017-02-03 | 2018-08-09 | 良夫 川又 | 相対位置検出システム及び画像表示システム |
| WO2024004941A1 (ja) * | 2022-06-27 | 2024-01-04 | 川崎重工業株式会社 | 手術支援システムおよび手術支援システムの制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102869310A (zh) | 2013-01-09 |
| US20130063580A1 (en) | 2013-03-14 |
| US9361818B2 (en) | 2016-06-07 |
| EP2570890A4 (en) | 2016-12-07 |
| EP2570890A1 (en) | 2013-03-20 |
| WO2011142165A1 (ja) | 2011-11-17 |
| CN102869310B (zh) | 2016-06-08 |
| JP5704833B2 (ja) | 2015-04-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5704833B2 (ja) | 操作入力装置およびマニピュレータシステム | |
| JP5530234B2 (ja) | 操作入力装置およびマニピュレータシステム | |
| US11534246B2 (en) | User input device for use in robotic surgery | |
| US12232820B2 (en) | Extended reality systems with three-dimensional visualizations of medical image scan slices | |
| US11278369B2 (en) | Control device, control method, and surgical system | |
| US20180263710A1 (en) | Medical imaging apparatus and surgical navigation system | |
| KR101705921B1 (ko) | 수술 로봇의 통합적 표현 | |
| JP2021194539A (ja) | 外科手術中のコンピュータ支援ナビゲーション用のカメラ追跡バー | |
| JP6264087B2 (ja) | 表示制御装置、表示装置および表示制御システム | |
| US10134185B2 (en) | Endoscopic surgery assisting system using head-mounted displays and associated methodology | |
| US10474411B2 (en) | System and method for alerting VR headset user to real-world objects | |
| JP2012223363A (ja) | 手術用撮像システム及び手術用ロボット | |
| US20190090728A1 (en) | Visualization system comprising an observation apparatus and an endoscope | |
| EP3163407A1 (en) | Method and apparatus for alerting to head mounted display user | |
| JP2017100206A (ja) | ロボット安全システム | |
| US20250185885A1 (en) | Visualization system comprising an observation apparatus and an endoscope | |
| AU2019292458A1 (en) | Display control system, display control device, and display control method | |
| JP2016158911A5 (ja) | ||
| EP3376276B1 (en) | Constant horizon 3d imaging system and related method | |
| JP6657858B2 (ja) | ロボット操作システム | |
| US12551295B2 (en) | Camera tracking system identifying phantom markers during computer assisted surgery navigation | |
| KR20190091870A (ko) | 모션센서와 vr을 활용한 로봇 제어 시스템 | |
| JPH07294296A (ja) | 遠隔監視装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130322 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140701 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140829 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150127 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150224 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5704833 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |