JP2011211432A - 車載用撮像装置 - Google Patents
車載用撮像装置 Download PDFInfo
- Publication number
- JP2011211432A JP2011211432A JP2010076250A JP2010076250A JP2011211432A JP 2011211432 A JP2011211432 A JP 2011211432A JP 2010076250 A JP2010076250 A JP 2010076250A JP 2010076250 A JP2010076250 A JP 2010076250A JP 2011211432 A JP2011211432 A JP 2011211432A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- image
- distance
- line
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Abstract
【解決手段】車両周辺を撮像する撮像光学系と、該撮像光学系を介して得られる被写体像を光電変換する撮像素子と、該撮像素子から出力される画像信号の処理を行う信号処理部と、を備え、前記信号処理部は、前記撮像された画像に前記車両の走行予想軌跡を前記車両からの距離に応じてピッチが異なる破線もしくは点線によって重畳表示する。また、前記破線もしくは点線のピッチは、前記車両に近いほうが粗く、前記車両から遠いほうが細かくする。
【選択図】図4
Description
そして、図6に示した進路予想ガイド104を、図7に示したように車両後方の視点で見た形態のはしご状の進路予想ガイド105に変換して、車内に設置されたモニタ上に表示された車両後方の映像に重畳して表示している。
人間の目は、近くにあるものは大きく見え遠くにあるものは小さく見える。そのため、前記破線もしくは点線のピッチを車両に近いほど粗くすると、該ピッチは人間が感覚的に得る距離感に近いものとなり、前記ピッチによりさらに感覚的に距離感を得やすくなる。
これにより、前記破線もしくは点線のピッチを決定することが容易になる。なお、前記破線もしくは点線のピッチを自車両からの実距離に対して等間隔とすると、前記破線もしくは点線は、車両後方から見た形態では自車両からの距離が近いほど粗く、自車両からの距離が遠いほど細かく表示される。
さらに、前記破線もしくは点線は、前記車両からの実距離に応じて線幅が異なるとよい。
自車両からの距離によって、前記破線もしくは点線の色、色の濃度又は線幅の少なくとも何れかを異ならせることで、さらに感覚的に距離感を得やすくなる。
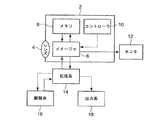
まず、図1を用いて本実施形態における撮像装置及びその周辺機器の構成について説明する。
撮像系2は車両の後方撮影画像を取得するためのカメラであって、車両後方側に向けて配置されたレンズ4と、レンズ4からの透過光を受光して撮影画像を出力するイメージャ6と、前記撮像画像に重畳表示すべき車両の予想軌跡の画像を保存しておくメモリ部8と、該メモリ部8に保存された予想軌跡の画像を前記撮像画像に重畳して表示するか否かを指令するコントローラ10とから構成されている。イメージャ6で出力される撮像画像、又は該撮像画像に前記予想軌跡の画像が重畳して表示された画像は、前記車両内に搭載されたモニタ12に表示される。
車両の駐車時などに、運転手が車両のシフトレバーを後退に入れると、撮像系2では、車両後方の映像を取得する。即ち、イメージャ6でレンズ4からの透過光を受光して撮影画像を出力する。
図2は、本実施例の車両の予想軌跡を車両上方の視点で表した図である。図2において22は車両であり、図2における上方が車両後方側である。図2は、車両22のハンドルの切れ角が、車両22が真っ直ぐ後方に進む切れ角となっている場合を示している。
本実施例における車両の進行方向の予想軌跡(進路予想ガイド24)は、車両22の舵角センサにより検出したハンドルの切れ角から求めた車両進行方向の予想軌跡を等距離ピッチの点線で示し、指定距離(図2においてはa)毎に車幅方向に等距離ピッチの点線を作ることで距離感の目安を作成している。
図3に示したように、本実施例における進路予想ガイド25は、自車両からの実距離に応じたピッチ間隔の点線で描かれているため、該ピッチは自車両からの距離が近いほど粗く、自車両からの距離が遠いほど細かく表示され、感覚的に距離感を得ることができる。
また、進路予想ガイド25は点線ではなく破線で描いてもよい。
進路予想ガイド25の線の太さについては、自車両からの距離が近いほど太く、遠いほど細く変化させるとよい。
また、線の色については、自車両からの距離が近いほど濃く、遠いほど薄く変化させるとよい。
大きさ(線の太さ)については、人間の視覚的には大きいものは近くに、小さいものは遠くに見える。そのため、前述の線の太さの変化は人間の感覚に合ったものとなる。
線の色については、近いものははっきりと濃く、遠いものは霞んで薄く見えるという感覚を人間は経験的に持っている。そのため、前述の線の色の変化は人間の感覚に合ったものとなる。
つまり、線の太さ及び色を前述の通り変化させることは、さらに感覚的に距離感を得やすくするために有効であるといえる。
近距離の被写体はモニタ12上に大きく映り、空間周波数も低いため、線によって多少隠れる部分があっても視認性が問題となる可能性は低い。そのため、重畳する線が太かったり、色が濃くても特に問題はない。
一方、遠距離の被写体はモニタ12上では小さく映り、空間周波数も高いため、線等が重畳されると視認性が悪くなる可能性が多分にある。そこで、前述のように遠いほうの線を細くしたり、線の色を薄くしたりすることで、見えなくなる部分を極力抑えて視認性の低下を抑えることができる。
図4は、周囲に障害物がない場合の車両後方の映像に予想軌跡を重畳表示した映像を示した図である。図4において、22は自車両の後端部、25は進路予想ガイドである。図4に示したように車両後方に障害物がない場合には、進路予想ガイドは処理部で特に処理されずにイメージャ6に戻り、そのままモニタ12に表示される。
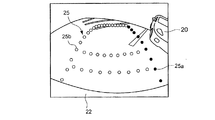
図5に示したように、他車両20などの障害物がある場合に、運転手に注意を促すために自車両の進行方向を示す進路予想ガイド25の色を障害物側の一部を変更して表示する。図5に示した例では、自車両の進行方向右側に他車両があるため、進行方向右側のガイドの点線25bだけ色を変更し、その他の部分の点線25aは色を変更せずに表示している。
なお、障害物が存在することの注意を促すための表示の変更方法は、図5に示したような色の変更に限られるものではなく、輝度の変化や破線や点線のピッチの変更によって行なうこともできる。
また、単に表示を変更するだけでなく、障害物(対象物)との距離に応じて変更する色や色の濃度、輝度、ピッチを段階的に変化させることで、更なる注意喚起を行なうことができる。
さらに、出力系18に指令を出して警報を出すことや、障害物との距離、速度によっては駆動系16に指令を出してブレーキをかけることもできる。
4 レンズ
6 イメージャ
8 メモリ
10 コントローラ
12 モニタ
22 車両
25 車両予想ガイド(予想軌跡)
Claims (5)
- 車両周辺を撮像する撮像光学系と、該撮像光学系を介して得られる被写体像を光電変換する撮像素子と、該撮像素子から出力される画像信号の処理を行う信号処理部と、を備え、
前記信号処理部は、前記撮像された画像に前記車両の走行予想軌跡を前記車両からの距離に応じてピッチが異なる破線もしくは点線によって重畳表示することを特徴とする車載用撮像装置。 - 前記破線もしくは点線のピッチは、前記車両に近いほうが粗く、前記車両から遠いほうが細かいことを特徴とする請求項1記載の車載用撮像装置。
- 前記破線もしくは点線のピッチは、前記車両からの実距離に対して等間隔となっている請求項2に記載の車載用撮像装置。
- 前記破線もしくは点線は、前記車両からの実距離に応じて色もしくは色の濃度が異なることを特徴とする請求項1〜3のいずれかに記載の車載用撮像装置。
- 前記破線もしくは点線は、前記車両からの実距離に応じて線幅が異なることを特徴とする請求項1〜4のいずれかに記載の車載用撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010076250A JP2011211432A (ja) | 2010-03-29 | 2010-03-29 | 車載用撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010076250A JP2011211432A (ja) | 2010-03-29 | 2010-03-29 | 車載用撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011211432A true JP2011211432A (ja) | 2011-10-20 |
| JP2011211432A5 JP2011211432A5 (ja) | 2013-03-14 |
Family
ID=44942050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010076250A Pending JP2011211432A (ja) | 2010-03-29 | 2010-03-29 | 車載用撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011211432A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013153399A (ja) * | 2011-11-24 | 2013-08-08 | Kyocera Corp | 車両用撮像モジュールおよび駐車支援装置 |
| WO2019021524A1 (ja) | 2017-07-25 | 2019-01-31 | 株式会社Jvcケンウッド | 表示制御装置、表示制御システム、表示制御方法及び表示制御プログラム |
| JP2019102988A (ja) * | 2017-12-04 | 2019-06-24 | アルパイン株式会社 | 運転支援システムおよび後方ガイド画像の生成方法 |
| US10737726B2 (en) | 2017-06-16 | 2020-08-11 | Jvckenwood Corporation | Display control device, display control system, display control method, and display control program |
| CN113085729A (zh) * | 2020-01-08 | 2021-07-09 | 丰田自动车株式会社 | 车辆用电子镜系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004123057A (ja) * | 2002-10-07 | 2004-04-22 | Yazaki Corp | 駐車支援装置 |
| JP2007043530A (ja) * | 2005-08-04 | 2007-02-15 | Nissan Motor Co Ltd | 運転支援装置、および運転支援方法 |
| JP2008219716A (ja) * | 2007-03-07 | 2008-09-18 | Matsushita Electric Ind Co Ltd | 表示制御装置 |
-
2010
- 2010-03-29 JP JP2010076250A patent/JP2011211432A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004123057A (ja) * | 2002-10-07 | 2004-04-22 | Yazaki Corp | 駐車支援装置 |
| JP2007043530A (ja) * | 2005-08-04 | 2007-02-15 | Nissan Motor Co Ltd | 運転支援装置、および運転支援方法 |
| JP2008219716A (ja) * | 2007-03-07 | 2008-09-18 | Matsushita Electric Ind Co Ltd | 表示制御装置 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013153399A (ja) * | 2011-11-24 | 2013-08-08 | Kyocera Corp | 車両用撮像モジュールおよび駐車支援装置 |
| US10737726B2 (en) | 2017-06-16 | 2020-08-11 | Jvckenwood Corporation | Display control device, display control system, display control method, and display control program |
| US10889324B2 (en) | 2017-06-16 | 2021-01-12 | Jvckenwood Corporation | Display control device, display control system, display control method, and display control program |
| WO2019021524A1 (ja) | 2017-07-25 | 2019-01-31 | 株式会社Jvcケンウッド | 表示制御装置、表示制御システム、表示制御方法及び表示制御プログラム |
| US11132564B2 (en) | 2017-07-25 | 2021-09-28 | Jvckenwood Corporation | Display control device, display control system, display control method, and display control program |
| JP2019102988A (ja) * | 2017-12-04 | 2019-06-24 | アルパイン株式会社 | 運転支援システムおよび後方ガイド画像の生成方法 |
| JP7037926B2 (ja) | 2017-12-04 | 2022-03-17 | アルパイン株式会社 | 運転支援システムおよび後方ガイド画像の生成方法 |
| CN113085729A (zh) * | 2020-01-08 | 2021-07-09 | 丰田自动车株式会社 | 车辆用电子镜系统 |
| JP2021111854A (ja) * | 2020-01-08 | 2021-08-02 | トヨタ自動車株式会社 | 車両用電子ミラーシステム |
| JP7327171B2 (ja) | 2020-01-08 | 2023-08-16 | トヨタ自動車株式会社 | 車両用電子ミラーシステム |
| CN113085729B (zh) * | 2020-01-08 | 2023-09-12 | 丰田自动车株式会社 | 车辆用电子镜系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5454934B2 (ja) | 運転支援装置 | |
| JP4687411B2 (ja) | 車両周辺画像処理装置及びプログラム | |
| KR101354068B1 (ko) | 차량주변화상생성장치 | |
| JP5099451B2 (ja) | 車両周辺確認装置 | |
| JP4846426B2 (ja) | 車両周囲監視装置 | |
| WO2016002163A1 (ja) | 画像表示装置、画像表示方法 | |
| JP5704902B2 (ja) | 運転支援装置及び運転支援方法 | |
| WO2016067544A1 (ja) | 車載注意喚起システム及び報知制御装置 | |
| JP6379779B2 (ja) | 車両用表示装置 | |
| JP2008123215A (ja) | 運転支援装置、運転支援方法、及び、プログラム | |
| JP2007221200A (ja) | 車両周辺監視装置 | |
| JP2014129093A (ja) | 車両用周辺監視装置 | |
| JP2011211432A (ja) | 車載用撮像装置 | |
| JP2007124097A (ja) | 車両周辺視認装置 | |
| JP2010264945A (ja) | 駐車支援装置、駐車支援方法及び駐車支援プログラム | |
| WO2011013813A1 (ja) | 車載装置および画像処理プログラム | |
| JP2012001126A (ja) | 車両用周辺監視装置 | |
| JP2008114691A (ja) | 車両周辺監視装置および車両周辺監視映像表示方法 | |
| CN112272946B (zh) | 车辆控制装置 | |
| JP2015008453A (ja) | カメラ装置および警告方法 | |
| JP6439233B2 (ja) | 車両用画像表示装置及び画像処理方法 | |
| JP2012147285A (ja) | バックモニタ装置 | |
| JP2012090087A (ja) | 車両周辺の画像を用いた運転支援装置 | |
| JP2012166689A (ja) | 運転支援装置 | |
| JP5691339B2 (ja) | 運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130130 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131028 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140725 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141128 |