JP2011190873A - パワートレーンの制御装置 - Google Patents
パワートレーンの制御装置 Download PDFInfo
- Publication number
- JP2011190873A JP2011190873A JP2010057785A JP2010057785A JP2011190873A JP 2011190873 A JP2011190873 A JP 2011190873A JP 2010057785 A JP2010057785 A JP 2010057785A JP 2010057785 A JP2010057785 A JP 2010057785A JP 2011190873 A JP2011190873 A JP 2011190873A
- Authority
- JP
- Japan
- Prior art keywords
- value
- limit value
- acquired
- upper limit
- lower limit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Control Of Transmission Device (AREA)
Abstract
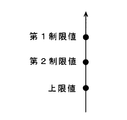
【解決手段】上限値、下限値および回転数のうちのいずれかを各々が設定する、優先順位付けされた複数の制御システムから、優先順位が高い順に、上限値、下限値および回転数のうちのいずれかが取得される。上限値または下限値が取得されると(S102にてYES)、取得された上限値または下限値が、第1制限値または第2制限値として記憶される(S106)。第1制限値よりも小さく、第2制限値よりも大きい回転数が取得されると(S102にてNO、S110にてYES)、取得された回転数が目標値として設定される(S112)。回転数が取得されると(S102にてNO)、上限値、下限値および回転数を取得することが中断される(S120)。無段変速機は、プライマリプーリ回転数NINが目標値になるように制御される(S122)。
【選択図】図8
Description
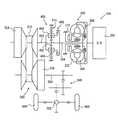
図1を参照して、車両に搭載されたパワートレーン100のエンジン200の出力は、トルクコンバータ300を介して、前後進切換装置400を有する無段変速機500に入力される。無段変速機500の出力は、減速歯車600および差動歯車装置700に伝達され、左右の駆動輪800へ分配される。パワートレーン100は、後述するECU(Electronic Control Unit)900により制御される。なお、エンジン200の代わりにもしくは加えて、モータを駆動源として用いるようにしてもよい。
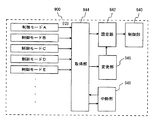
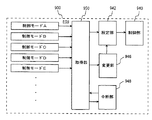
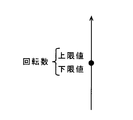
以下、第2の実施の形態について説明する。図15を参照して、ECU900の取得部950は、前述した複数の制御システムから、優先順位が高い順に上限値、下限値および回転数のうちのいずれかを取得するとともに、回転数を上限値および下限値として取得する。すなわち、回転数が、上限値および下限値に変換される。図16に示すように、上限値および下限値が、取得された回転数と同じ値であると見なされる。すなわち、上限値および下限値が、同じ値であると見なされる。
プライマリプーリ回転数NINの目標値を設定する代わりに、エンジン回転数NEの目標値を設定するようにしてもよい。この場合、エンジン回転数NEとプライマリプーリ回転数NINとが同じであると見なしてもよい。すなわち、プライマリプーリ回転数NINがエンジン回転数NEの目標値になるように、無段変速機500の変速比を制御するようにしてもよい。
Claims (7)
- 回転軸の回転数が目標値になるように制御するための制御手段を備えた、パワートレーンの制御装置であって、
上限値、下限値および回転数のうちのいずれかを各々が設定する、予め定められた順番で優先順位付けされた複数の制御システムから、優先順位が高い順に前記上限値、前記下限値および前記回転数のうちのいずれかを取得するための手段と、
前記上限値が取得されると、予め定められた第1の値を取得された上限値に応じて変更するための第1の変更手段と、
前記下限値が取得されると、予め定められた、前記第1の値よりも小さい第2の値を取得された下限値に応じて変更するための第2の変更手段と、
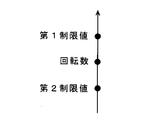
前記第1の値よりも小さく、かつ、前記第2の値よりも大きい回転数が取得されると、取得された回転数を前記目標値として設定するための手段と、
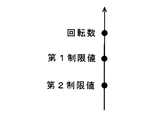
前記回転数が取得されると、前記上限値、前記下限値および前記回転数を取得することを中断するための手段とを備える、パワートレーンの制御装置。 - 前記第1の値よりも大きい回転数が取得されると、前記第1の値を前記目標値として設定するための手段と、
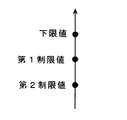
前記第2の値よりも小さい回転数が取得されると、前記第2の値を前記目標値として設定するための手段とをさらに備える、請求項1に記載のパワートレーンの制御装置。 - 前記第1の値よりも大きい下限値が取得されると、前記第1の値を前記目標値として設定するための手段と、
前記第1の値よりも大きい下限値が取得されると、前記上限値、前記下限値および前記回転数を取得することを中断するための手段と、
前記第2の値よりも小さい上限値が取得されると、前記第2の値を前記目標値として設定するための手段と、
前記第2の値よりも小さい上限値が取得されると、前記上限値および前記下限値を取得することを中断するための手段とをさらに備え、
前記第1の変更手段は、前記第1の値よりも小さく、かつ前記第2の値よりも大きい上限値が取得されると、前記第1の値を取得された上限値に応じて変更するための手段を含み、
前記第2の変更手段は、前記第1の値よりも小さく、かつ前記第2の値よりも大きい下限値が取得されると、前記第2の値を取得された下限値に応じて変更するための手段を含む、請求項1または2に記載のパワートレーンの制御装置。 - 回転軸の回転数が目標値になるように制御するための制御手段を備えた、パワートレーンの制御装置であって、
上限値、下限値および回転数のうちのいずれかを各々が設定する、予め定められた順番で優先順位付けされた複数の制御システムから、優先順位が高い順に前記上限値、前記下限値および前記回転数のうちのいずれかを取得するとともに、前記回転数を、前記上限値および前記下限値として取得するための手段と、
予め定められた第1の値よりも小さく、かつ、予め定められた、前記第1の値よりも小さい第2の値よりも大きい上限値が取得されると、前記第1の値を前記第1の値よりも小さく、かつ前記第2の値よりも大きい上限値に応じて変更するための第1の変更手段と、
前記前記第1の値よりも小さく、かつ前記第2の値よりも大きい下限値が取得されると、前記第2の値を前記前記第1の値よりも小さく、かつ前記第2の値よりも大きい下限値に応じて変更するための第2の変更手段と、
前記第1の値よりも大きい下限値が取得されると、前記第1の値を前記目標値として設定するための手段と、
前記第1の値よりも大きい下限値が取得されると、前記上限値、前記下限値および前記回転数を取得することを中断するための手段と、
前記第2の値よりも小さい上限値が取得されると、前記第2の値を前記目標値として設定するための手段と、
前記第2の値よりも小さい上限値が取得されると、前記上限値、前記下限値および前記回転数を取得することを中断するための手段とを備える、パワートレーンの制御装置。 - 回転軸の回転数が目標値になるように制御するための制御手段を備えた、パワートレーンの制御装置であって、
上限値および下限値のうちのいずれかを各々が設定する、予め定められた順番で優先順位付けされた複数の制御システムから、優先順位が高い順に前記上限値および前記下限値のうちのいずれかを取得するための手段と、
予め定められた第1の値よりも小さく、かつ、予め定められた、前記第1の値よりも小さい第2の値よりも大きい上限値が取得されると、前記第1の値を前記第1の値よりも小さく、かつ前記第2の値よりも大きい上限値に応じて変更するための第1の変更手段と、
前記前記第1の値よりも小さく、かつ前記第2の値よりも大きい下限値が取得されると、前記第2の値を前記前記第1の値よりも小さく、かつ前記第2の値よりも大きい下限値に応じて変更するための第2の変更手段と、
前記第1の値よりも大きい下限値が取得されると、前記第1の値を前記目標値として設定するための手段と、
前記第1の値よりも大きい下限値が取得されると、前記上限値および前記下限値を取得することを中断するための手段と、
前記第2の値よりも小さい上限値が取得されると、前記第2の値を前記目標値として設定するための手段と、
前記前記第1の値よりも小さい第2の値よりも小さい上限値が取得されると、前記上限値および前記下限値を取得することを中断するための手段とを備える、パワートレーンの制御装置。 - 前記第1の変更手段は、前記第1の値よりも小さく、かつ前記第2の値よりも大きい上限値が取得されると、前記第1の値よりも小さく、かつ前記第2の値よりも大きい上限値を前記第1の値として記憶するための手段を含み、
前記第2の変更手段は、前記第1の値よりも小さく、かつ前記第2の値よりも大きい下限値が取得されると、前記第1の値よりも小さく、かつ前記第2の値よりも大きい下限値を前記第2の値として記憶するための手段を含む、請求項1〜5のいずれかに記載のパワートレーンの制御装置。 - 前記回転軸は、無段変速機の入力軸であり、
前記制御手段は、前記無段変速機の入力軸の回転数が前記目標値になるように制御するための手段を含む、請求項1〜6のいずれかに記載のパワートレーンの制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010057785A JP5287771B2 (ja) | 2010-03-15 | 2010-03-15 | パワートレーンの制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010057785A JP5287771B2 (ja) | 2010-03-15 | 2010-03-15 | パワートレーンの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011190873A true JP2011190873A (ja) | 2011-09-29 |
| JP5287771B2 JP5287771B2 (ja) | 2013-09-11 |
Family
ID=44796009
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010057785A Expired - Fee Related JP5287771B2 (ja) | 2010-03-15 | 2010-03-15 | パワートレーンの制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5287771B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005140174A (ja) * | 2003-11-04 | 2005-06-02 | Honda Motor Co Ltd | 車両用無段変速機の制御装置 |
| JP2006046383A (ja) * | 2004-07-30 | 2006-02-16 | Fuji Heavy Ind Ltd | 無段変速機の制御装置 |
| JP2009236182A (ja) * | 2008-03-26 | 2009-10-15 | Toyota Motor Corp | 無段変速機の制御装置 |
| JP2010053982A (ja) * | 2008-08-28 | 2010-03-11 | Toyota Motor Corp | 車両用無段変速機の制御装置 |
-
2010
- 2010-03-15 JP JP2010057785A patent/JP5287771B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005140174A (ja) * | 2003-11-04 | 2005-06-02 | Honda Motor Co Ltd | 車両用無段変速機の制御装置 |
| JP2006046383A (ja) * | 2004-07-30 | 2006-02-16 | Fuji Heavy Ind Ltd | 無段変速機の制御装置 |
| JP2009236182A (ja) * | 2008-03-26 | 2009-10-15 | Toyota Motor Corp | 無段変速機の制御装置 |
| JP2010053982A (ja) * | 2008-08-28 | 2010-03-11 | Toyota Motor Corp | 車両用無段変速機の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5287771B2 (ja) | 2013-09-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4123289B2 (ja) | 無段変速機の変速制御装置 | |
| JP4475281B2 (ja) | 車両用無段変速機の変速制御装置 | |
| KR101967570B1 (ko) | 차량용 무단 변속기의 제어 장치 | |
| JP5267693B1 (ja) | 車両 | |
| JP5743876B2 (ja) | 無段変速機の変速制御装置 | |
| CN109790920B (zh) | 无级变速器的变速控制方法以及变速控制装置 | |
| JP6287934B2 (ja) | 車両の制御装置 | |
| JP2010151154A (ja) | 車両の制御装置 | |
| JPWO2020121751A1 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP2009063161A (ja) | 無段変速機の制御装置 | |
| JP5163038B2 (ja) | 自動変速機の制御装置、制御方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体 | |
| JP5347584B2 (ja) | 車両用自動変速機の変速速度制御装置 | |
| JP5287771B2 (ja) | パワートレーンの制御装置 | |
| JPH03121354A (ja) | 自動変速機の変速制御装置 | |
| JP5500243B2 (ja) | 車両、変速機の制御方法および制御装置 | |
| JP2004324842A (ja) | 無段変速機の変速制御装置 | |
| JP5333667B2 (ja) | 車両、無段変速機の制御装置および制御方法 | |
| JP7064621B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP2009014105A (ja) | 車両用無段変速機の制御装置 | |
| JP7029550B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP6855119B2 (ja) | 無段変速機の制御装置 | |
| JP2018204679A (ja) | 変速制御装置 | |
| JP2018155331A (ja) | 無段変速機の制御装置 | |
| JP5790538B2 (ja) | 車両 | |
| JPH10184889A (ja) | 車両用自動変速機の変速制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120926 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130425 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130520 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5287771 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |