JP2011128011A - 誘導装置及び目標検出方法 - Google Patents
誘導装置及び目標検出方法 Download PDFInfo
- Publication number
- JP2011128011A JP2011128011A JP2009286677A JP2009286677A JP2011128011A JP 2011128011 A JP2011128011 A JP 2011128011A JP 2009286677 A JP2009286677 A JP 2009286677A JP 2009286677 A JP2009286677 A JP 2009286677A JP 2011128011 A JP2011128011 A JP 2011128011A
- Authority
- JP
- Japan
- Prior art keywords
- angle
- target
- reflected wave
- detection
- received
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Abstract
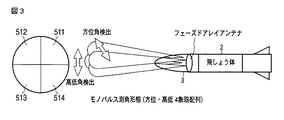
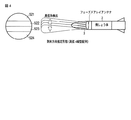
【解決手段】切換型分配合成器9は、モノパルス測角形態又は到来方向推定形態に応じて、複数のアンテナ素子6−1〜6−Nの配列を複数の領域に分割して、領域毎に受信した反射波の受信電力を合成する。誤差角演算器16は、目標の方位角及び高低角の少なくとのいずれか一方を、モノパルス測角形態で分割された領域の受信電力に基づいて検出する。誤差角演算器17は、到来方向推定形態で分割された複数の領域の受信電力から、目標からの直接反射波と地表反射波を分離し、目標の高低角を検出する。目標との相対距離が所定の距離未満である場合は、モノパルス測角形態による測角と到来方向推定形態による測角が交互に行なわれるよう、測角形態切換器14によって制御される。
【選択図】 図1
Description
図1は、本発明の第1の実施形態に係る誘導装置を搭載した飛しょう体による目標捕捉の一例を示す模式図である。
第2の実施形態に係る誘導装置を搭載した飛しょう体による目標捕捉の例も、図1において示される。
Claims (9)
- 空中を飛しょうする目標に対して電波を送信し、前記目標によって反射された第1の反射波、及び前記第1の反射波が地表又は海面によって反射された第2の反射波の少なくともいずれか一方を受信する複数のアンテナ素子を具備する送受信手段と、
モノパルス測角のための第1の形態又は到来方向推定のための第2の形態に応じて、前記複数のアンテナ素子の配列を複数の領域に分割して、領域毎に受信した反射波の受信電力を合成する電力合成手段と、
前記目標の方位角及び高低角の少なくとのいずれか一方を、前記第1の形態で分割された複数の領域の受信電力に基づいて、モノパルス測角によって検出する第1の角度検出手段と、
前記第2の形態で分割された複数の領域の受信電力から、前記第1の反射波と前記第2の反射波を到来方向推定によって分離し、前記目標の高低角を検出する第2の角度検出手段と、
前記目標との相対距離を、前記複数の領域の合計受信電力に基づいて算出する距離算出手段と、
前記距離算出手段が算出した相対距離が所定の距離以上である場合は、前記第1の角度検出手段に前記目標の方位角及び高低角を検出させ、前記相対距離が所定の距離未満である場合は、前記第1の角度検出手段による前記目標の方位角の検出と、前記第2の角度検出手段による前記目標の高低角の検出とを交互に行なわせる検出制御手段と、
前記第1又は第2の角度検出手段が検出した前記目標の方位角及び高低角に基づいて、前記目標の方向を算出する方向算出手段と、
前記方向算出手段が算出した前記目標の方向に基づいて飛しょう体の操舵信号を生成する操舵信号生成手段と、
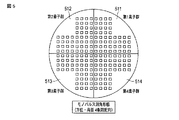
を具備する誘導装置。 - 前記第1の形態において、前記複数のアンテナ素子の配置は上下左右に4等分され、
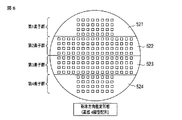
前記第2の形態において、前記複数のアンテナ素子の配置は縦列に4つの領域に分割される請求項1に記載の誘導装置。 - 前記相対距離が所定の距離未満である場合に、前記検出制御手段は、前記電力合成手段による電力の合成形態を前記第1の形態と第2の形態で切換えて、前記第1の角度検出手段による前記目標の方位角の検出と、前記第2の角度検出手段による前記目標の高低角の検出とを交互に行なわせる請求項1に記載の誘導装置。
- 前記第1の反射波及び前記第2の反射波のいずれか一方が前記送受信手段によって受信された場合に、前記第2の角度検出手段は、以前の検出で到来方向推定によって検出された前記目標の高低角から高低角の予測値を推定する請求項1に記載の誘導装置。
- 前記第1の反射波及び前記第2の反射波が前記送受信手段によって受信されない場合、前記第2の角度検出手段は、前記第1の角度検出手段のモノパルス測角によって検出される高低角を前記目標の高低角として設定する請求項1に記載の誘導装置。
- 前記第1の反射波及び前記第2の反射波が前記送受信手段によって受信された場合に、前記第2の角度検出手段は、前記第1の反射波及び前記第2の反射波のうち上側の反射波を前記飛しょう体の慣性情報に基づいて判定し、当該上側の反射波から、前記目標の高低角を検出する請求項1に記載の誘導装置。
- 前記飛しょう体は、当該飛しょう体の姿勢角及び位置を含む慣性情報を測定する測定手段を具備し、
前記第2の角度検出手段は、前記慣性情報に基づいて上下方向を判定する請求項6に記載の誘導装置。 - 前記複数のアンテナ素子の配置は、8つの領域に分割され、
前記電力合成手段は、前記8つの領域それぞれにおいて受信電力を合成し、前記第1の形態又は前記第2の形態に応じて合成結果を演算する請求項1に記載の誘導装置。 - 複数のアンテナ素子によって、空中を飛しょうする目標に対して電波を送信し、前記目標によって反射された第1の反射波、及び前記第1の反射波が地表又は海面によって反射された第2の反射波の少なくともいずれか一方を受信する送受信ステップと、
モノパルス測角のための第1の形態又は到来方向推定のための第2の形態に応じて、前記複数のアンテナ素子の配列を複数の領域に分割して、領域毎に受信した反射波の受信電力を合成する電力合成ステップと、
前記目標の方位角及び高低角の少なくとのいずれか一方を、前記第1の形態で分割された複数の領域の受信電力に基づいて、モノパルス測角によって検出する第1の角度検出ステップと、
前記第2の形態で分割された複数の領域の受信電力から、前記第1の反射波と前記第2の反射波を到来方向推定によって分離し、前記目標の高低角を検出する第2の角度検出ステップと、
前記目標との相対距離を、前記複数の領域の合計受信電力に基づいて算出する距離算出ステップと、
前記算出された相対距離が所定の距離以上である場合は、前記第1の角度検出ステップによる前記目標の方位角及び高低角の検出を行なわせ、前記相対距離が所定の距離未満である場合は、前記第1の角度検出ステップによる前記目標の方位角の検出と、前記第2の角度検出ステップによる前記目標の高低角の検出とを交互に行なわせる検出制御ステップと、
前記第1又は第2の角度検出ステップにより検出された前記目標の方位角及び高低角に基づいて、前記目標の方向を算出する方向算出ステップと、
を具備する目標検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009286677A JP5380267B2 (ja) | 2009-12-17 | 2009-12-17 | 誘導装置及び目標検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009286677A JP5380267B2 (ja) | 2009-12-17 | 2009-12-17 | 誘導装置及び目標検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011128011A true JP2011128011A (ja) | 2011-06-30 |
| JP5380267B2 JP5380267B2 (ja) | 2014-01-08 |
Family
ID=44290758
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009286677A Expired - Fee Related JP5380267B2 (ja) | 2009-12-17 | 2009-12-17 | 誘導装置及び目標検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5380267B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013061214A (ja) * | 2011-09-13 | 2013-04-04 | Toshiba Corp | 目標追随装置、誘導装置及び目標追随方法 |
| JP2015025744A (ja) * | 2013-07-26 | 2015-02-05 | 日本電気株式会社 | レーダ装置及び飛翔体仰角算出方法 |
| EP3276373A1 (en) * | 2016-07-26 | 2018-01-31 | Alpha Networks Inc. | Mobile navigation method and system |
| KR102080310B1 (ko) * | 2019-02-28 | 2020-02-21 | 한화시스템 주식회사 | 위상 배열 레이더의 표적 탐지 방법 및 기록 매체 |
| KR20200047055A (ko) * | 2018-10-26 | 2020-05-07 | 재단법인대구경북과학기술원 | 레이더의 각도 추정 방법, 각도 추정 장치 및 송수신 안테나 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11194167A (ja) * | 1998-01-05 | 1999-07-21 | Toshiba Corp | レーダ装置 |
| JP2001264427A (ja) * | 2000-03-22 | 2001-09-26 | Toshiba Corp | レーダ装置 |
| JP2002310597A (ja) * | 2001-04-04 | 2002-10-23 | Mitsubishi Electric Corp | 誘導飛しょう体及びレーダ装置 |
| JP2008098999A (ja) * | 2006-10-12 | 2008-04-24 | Toshiba Corp | レーダ装置 |
-
2009
- 2009-12-17 JP JP2009286677A patent/JP5380267B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11194167A (ja) * | 1998-01-05 | 1999-07-21 | Toshiba Corp | レーダ装置 |
| JP2001264427A (ja) * | 2000-03-22 | 2001-09-26 | Toshiba Corp | レーダ装置 |
| JP2002310597A (ja) * | 2001-04-04 | 2002-10-23 | Mitsubishi Electric Corp | 誘導飛しょう体及びレーダ装置 |
| JP2008098999A (ja) * | 2006-10-12 | 2008-04-24 | Toshiba Corp | レーダ装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013061214A (ja) * | 2011-09-13 | 2013-04-04 | Toshiba Corp | 目標追随装置、誘導装置及び目標追随方法 |
| JP2015025744A (ja) * | 2013-07-26 | 2015-02-05 | 日本電気株式会社 | レーダ装置及び飛翔体仰角算出方法 |
| EP3276373A1 (en) * | 2016-07-26 | 2018-01-31 | Alpha Networks Inc. | Mobile navigation method and system |
| US10444343B2 (en) | 2016-07-26 | 2019-10-15 | Alpha Networks Inc. | Mobile navigation method and system |
| KR20200047055A (ko) * | 2018-10-26 | 2020-05-07 | 재단법인대구경북과학기술원 | 레이더의 각도 추정 방법, 각도 추정 장치 및 송수신 안테나 |
| KR102159784B1 (ko) * | 2018-10-26 | 2020-09-24 | 재단법인대구경북과학기술원 | 레이더의 각도 추정 방법, 각도 추정 장치 및 송수신 안테나 |
| KR102080310B1 (ko) * | 2019-02-28 | 2020-02-21 | 한화시스템 주식회사 | 위상 배열 레이더의 표적 탐지 방법 및 기록 매체 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5380267B2 (ja) | 2014-01-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9470782B2 (en) | Method and apparatus for increasing angular resolution in an automotive radar system | |
| KR102516365B1 (ko) | 차량용 radar 제어 방법 및 장치 | |
| EP1910864B1 (en) | A system and method for positioning a transponder | |
| JP5380267B2 (ja) | 誘導装置及び目標検出方法 | |
| KR20140112027A (ko) | 입사하는 방사선의 도래방향을 결정하기 위한 방법 및 센서 | |
| JP2019053030A (ja) | レーダー映像処理方法、装置及びシステム | |
| WO2006137897A2 (en) | Method and apparatus for improved determination of range and angle of arrival utilizing a two-tone cw radar | |
| EP1910860A1 (en) | A positioning system and method | |
| US11092686B2 (en) | Method, apparatus and device for doppler compensation in a time switched MIMO radar system | |
| JP2020003475A (ja) | レーダー駆動装置及び方法 | |
| WO2011146011A1 (en) | Determining the geographic locaton of a portable electronic device | |
| JP2011242182A (ja) | パッシブレーダシステムおよびパッシブレーダ方法 | |
| JP2001272464A (ja) | レーダ装置 | |
| JP2002267745A (ja) | センサー統制による同期式追尾方法及び装置 | |
| US20140168003A1 (en) | Antenna arrangement for a radar system | |
| US20230266456A1 (en) | Systems and methods of target detection | |
| JP2008304329A (ja) | 測定装置 | |
| JP6157565B2 (ja) | 物体検出装置 | |
| JP2751616B2 (ja) | レーダ信号処理方法およびその装置 | |
| JP2002267732A (ja) | パッシブ位置標定方法およびパッシブ位置標定装置 | |
| JPH05150037A (ja) | レーダ信号処理装置 | |
| JP2004132827A (ja) | レーダ装置およびレーダシステム | |
| JP2002071795A (ja) | 目標捕捉・追尾用レーダ装置 | |
| JP4432967B2 (ja) | レーダ信号処理装置 | |
| Hamdi et al. | Doppler Effect on Location-Based Tracking in Mobile Sensor Networks |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120614 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130930 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5380267 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |