JP2011106905A - 探傷システム - Google Patents
探傷システム Download PDFInfo
- Publication number
- JP2011106905A JP2011106905A JP2009260744A JP2009260744A JP2011106905A JP 2011106905 A JP2011106905 A JP 2011106905A JP 2009260744 A JP2009260744 A JP 2009260744A JP 2009260744 A JP2009260744 A JP 2009260744A JP 2011106905 A JP2011106905 A JP 2011106905A
- Authority
- JP
- Japan
- Prior art keywords
- probe
- position information
- robot
- information
- flaw detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
Abstract
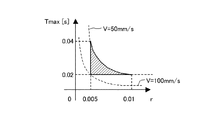
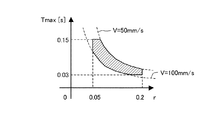
【解決手段】探傷システム1は、多関節ロボット4と、走行軸51上でロボット4を移動させる走行装置5と、ロボット4の手首に取り付けられたプローブ31と、ロボット4の位置に関する情報を所定周期で出力する走行装置位置情報取得器52と、プローブ31の位置に関する情報を所定周期で出力するロボット位置情報取得器41と、プローブ31の位置情報を算出して出力する制御器42と、プローブの位置情報と探傷情報とを対応付ける探傷器43と、を備える。取得したプローブの位置情報と実際の位置との許容ずれ量をDとしたときに、条件式(1)を満たすように、許容ずれ量D、上限周期Tmax、プローブの移動速度V、及び、ワークの形状の走行軸に対する変化率r、をそれぞれ設定する。
【数1】
【選択図】図1
Description

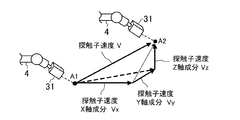
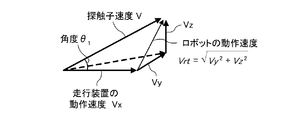
図5に示すように、ワーク2が概ねX軸方向に沿うように配置され、走行レール51がX軸方向に延びているとする。つまり、走行装置5が一軸構成とする。この場合、走行装置5が、探触子31の移動速度Vのうち、そのX軸方向成分Vx、を担い、ロボット4が、Y軸方向成分Vy及びZ軸方向成分Vzを担うことになる。
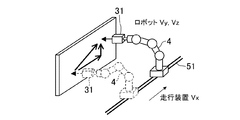
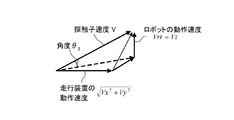
図7は、走行装置5の走行レール51が2軸構成の場合の図を示している。ここでは、走行レール51が、X軸及びY軸のそれぞれに対応しているとする。この場合は、走行装置5が移動速度のX軸方向成分Vx及びY軸方向成分Vyを担い、Z軸方向成分Vzはロボット4が担うことになる。
2 ワーク
31 探触子(プローブ)
4 多関節ロボット
41 ロボットコントローラ(ロボット位置情報取得器)
42 制御装置(制御器)
43 探傷器
5 走行装置
51 走行レール(走行軸)
52 位置センサ(走行装置位置情報取得器)
Claims (2)
- 三次元形状を有するワークの探傷検査を行う探傷システムであって、
多関節ロボットと、
所定の一軸又は二軸からなる走行軸上で前記多関節ロボットを移動させることにより、前記多関節ロボットを前記ワークに沿うように移動させる走行装置と、
前記多関節ロボットの手首に取り付けられかつ、当該多関節ロボット及び前記走行装置の組み合わせにより前記ワークの表面を走査しながら、当該ワークの探傷情報を取得するプローブと、
前記走行装置によって前記走行軸上を移動する多関節ロボットの位置に関する情報をリアルタイムに取得して出力する取得器であって、当該多関節ロボットの位置に関する情報を、所定の動作周期で出力する走行装置位置情報取得器と、
前記多関節ロボットによって移動される前記プローブの位置に関する情報を非リアルタイムに取得して出力する取得器であって、当該プローブの位置に関する情報を、前記動作周期で出力するロボット位置情報取得器と、
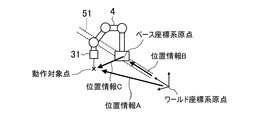
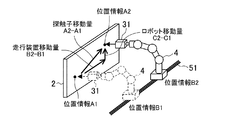
前記走行装置位置情報取得器からの情報を受けて、前記多関節ロボットの位置をワールド座標系からみたベース座標系の位置情報(第1位置情報)として算出すると共に、前記ロボット位置情報取得器からの情報を受けて、前記プローブの位置をベース座標系からみたプローブの位置情報(第2位置情報)として算出し、さらに、前記第1及び第2位置情報に基づいて、ワールド座標系からみた前記プローブの位置情報(第3位置情報)を算出して、これを出力する制御器と、
前記制御器から第3位置情報を取得すると共に、前記プローブから前記探傷情報を取得して、前記プローブの位置情報と前記探傷情報とを対応付ける探傷器と、を備え、
前記第3位置情報と、前記プローブの実際の位置との間の許容できるずれ量をDとしたときに、条件式(1)を満たすように、前記の許容ずれ量D、前記動作周期の上限Tmax、前記走行装置及び多関節ロボットによる前記プローブの移動速度V、及び、前記ワークの形状の前記走行軸に対する変化率r、をそれぞれ設定する探傷システム。
- 請求項1に記載の探傷システムにおいて、
前記制御器は、前記第3位置情報から算出した前記プローブの移動量を、パルス信号として出力し、
前記探傷器は、前記制御器からのパルス信号をトリガにして、前記プローブから探傷情報を取得することにより、前記プローブの位置情報と前記探傷情報とを対応付ける探傷システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009260744A JP5427002B2 (ja) | 2009-11-16 | 2009-11-16 | 探傷システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009260744A JP5427002B2 (ja) | 2009-11-16 | 2009-11-16 | 探傷システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011106905A true JP2011106905A (ja) | 2011-06-02 |
| JP5427002B2 JP5427002B2 (ja) | 2014-02-26 |
Family
ID=44230555
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009260744A Active JP5427002B2 (ja) | 2009-11-16 | 2009-11-16 | 探傷システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5427002B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112539702A (zh) * | 2020-12-29 | 2021-03-23 | 上海市东方海事工程技术有限公司 | 一种用于轨道探伤车的自动对中方法及系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63135814A (ja) * | 1986-11-28 | 1988-06-08 | Hitachi Constr Mach Co Ltd | プロ−ブ姿勢制御装置 |
| JPH03123857A (ja) * | 1989-10-09 | 1991-05-27 | Hitachi Constr Mach Co Ltd | 探触子の速度制御装置 |
| JPH08110332A (ja) * | 1994-10-11 | 1996-04-30 | Komatsu Ltd | 多関節ロボットによる超音波検査方法、およびその装置 |
| JPH1014915A (ja) * | 1996-07-01 | 1998-01-20 | Aloka Co Ltd | 機械走査型超音波診断装置 |
| JPH1114610A (ja) * | 1997-06-18 | 1999-01-22 | Chiyoda Kogyo Kk | ロボットによる超音波探傷方法 |
-
2009
- 2009-11-16 JP JP2009260744A patent/JP5427002B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63135814A (ja) * | 1986-11-28 | 1988-06-08 | Hitachi Constr Mach Co Ltd | プロ−ブ姿勢制御装置 |
| JPH03123857A (ja) * | 1989-10-09 | 1991-05-27 | Hitachi Constr Mach Co Ltd | 探触子の速度制御装置 |
| JPH08110332A (ja) * | 1994-10-11 | 1996-04-30 | Komatsu Ltd | 多関節ロボットによる超音波検査方法、およびその装置 |
| JPH1014915A (ja) * | 1996-07-01 | 1998-01-20 | Aloka Co Ltd | 機械走査型超音波診断装置 |
| JPH1114610A (ja) * | 1997-06-18 | 1999-01-22 | Chiyoda Kogyo Kk | ロボットによる超音波探傷方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112539702A (zh) * | 2020-12-29 | 2021-03-23 | 上海市东方海事工程技术有限公司 | 一种用于轨道探伤车的自动对中方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5427002B2 (ja) | 2014-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Mineo et al. | Robotic path planning for non-destructive testing–A custom MATLAB toolbox approach | |
| US20150177194A1 (en) | Dual Robot Detection Apparatus For Non-Damage Detection | |
| KR102226986B1 (ko) | 자동화 장치 및 위치 검출 장치 | |
| US8429973B2 (en) | Ultrasonic inspection device and ultrasonic inspection method | |
| US9774827B2 (en) | Imaging inspection apparatus for setting one or more image-capturing positions on a line that connects two taught positions, control device thereof, and method of controlling imaging inspection apparatus | |
| EP3799790B1 (en) | Method for tracking location of two-dimensional non-destructive inspection scanner on target object using scanned structural features | |
| US9651525B2 (en) | Method and apparatus for scanning an object | |
| CN104502456A (zh) | 单机械手超声无损检测装置及方法 | |
| CN110196231B (zh) | 一种增材制件的激光超声离线检测装置及方法 | |
| CN104597125A (zh) | 一种用于3d打印件的超声检测控制方法及装置 | |
| CN110081821A (zh) | 智能化高铁白车身装配质量检测装置及其方法 | |
| JP2009264956A (ja) | 三次元形状・位置品質評価システム及びその方法 | |
| EP4071467B1 (en) | Ultrasound inspection system and method | |
| JP5427002B2 (ja) | 探傷システム | |
| EP3869190A1 (en) | Method for ultrasonic inspection of structure having radiused surface using multi-centric radius focusing | |
| CA2526835C (en) | Method and device for testing a structural component having a complex surface contour, by means of ultrasound | |
| CN102253125A (zh) | 超声检测换能器位置姿态自动调整装置 | |
| Louviot et al. | Robotised UT transmission NDT of composite complex shaped parts | |
| US10955237B2 (en) | Measurement method and measurement apparatus for capturing the surface topology of a workpiece | |
| CN102590246A (zh) | X射线数字平板成像检测系统的摄像扫描定位装置 | |
| KR101069891B1 (ko) | 곡면 가공장치 제어기 및 그 제어 방법 | |
| JP5629883B2 (ja) | 形状測定装置、形状測定方法及び形状測定プログラム | |
| KR101686825B1 (ko) | 3차원 스캐너용 제어 장치 | |
| Brown et al. | Automated full matrix capture for industrial processes | |
| Biro et al. | Integration of a scanning interferometer into a robotic inspection system for factory deployment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120131 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120418 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131129 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5427002 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |