JP2011101048A - Method of teaching handler, and handler - Google Patents
Method of teaching handler, and handler Download PDFInfo
- Publication number
- JP2011101048A JP2011101048A JP2011022492A JP2011022492A JP2011101048A JP 2011101048 A JP2011101048 A JP 2011101048A JP 2011022492 A JP2011022492 A JP 2011022492A JP 2011022492 A JP2011022492 A JP 2011022492A JP 2011101048 A JP2011101048 A JP 2011101048A
- Authority
- JP
- Japan
- Prior art keywords
- gripping member
- semiconductor chip
- chip
- flow rate
- gas
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Landscapes
- Testing Of Individual Semiconductor Devices (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
Description
本発明は、ハンドラのティーチング方法及びハンドラに関する。 The present invention relates to a teaching method for a handler and a handler.
半導体デバイスは、出荷する前に、IC検査装置にて検査される。IC検査装置は、ICハンドラとも呼ばれ、該ICハンドラには測定ロボットが備えられている。該測定ロボットは、吸着パッドにて半導体デバイス(半導体チップ)を真空吸着して把持し、テスターの検査用ソケットに装着する。この時、半導体チップは、所定の力で押圧しながら検査用ソケットに装着される。そして、テスターでの検査が終了すると、測定ロボットは、検査用ソケットに装着された半導体チップを真空吸着して検査用ソケットから外し、検査結果に応じた回収トレイに配置する。 A semiconductor device is inspected by an IC inspection apparatus before shipping. The IC inspection apparatus is also called an IC handler, and the IC handler is provided with a measurement robot. The measuring robot holds a semiconductor device (semiconductor chip) by vacuum suction with a suction pad and attaches it to a tester socket. At this time, the semiconductor chip is mounted on the inspection socket while being pressed with a predetermined force. When the inspection by the tester is completed, the measurement robot vacuum-sucks the semiconductor chip attached to the inspection socket, removes it from the inspection socket, and places it on the collection tray according to the inspection result.
ところで、吸着パッドで半導体チップを所定の力で押圧しながら検査用ソケットに装着することから、検査用ソケットに装着している半導体チップを真空吸着して取り外す際、吸着パッドが半導体チップの上面より低い位置まで下がって吸着する。この場合、半導体チップに吸着パッドを介して下降機構の推力が加わって、半導体チップに大きな負荷が加わり損傷する虞がある。また、逆に、半導体チップを吸着する高さが少しでも高いと、真空吸着のエアーの流れで半導体チップを吸い上げてしまい、吸着パッドが精度良く半導体チップを吸着できず、位置ずれを起こした状態で吸着パッドが吸着するといった問題があった。 By the way, since the semiconductor chip is attached to the inspection socket while pressing the semiconductor chip with a predetermined force with the suction pad, when the semiconductor chip attached to the inspection socket is removed by vacuum suction, the suction pad is removed from the upper surface of the semiconductor chip. Adsorbs to a lower position. In this case, the thrust of the lowering mechanism is applied to the semiconductor chip via the suction pad, and a large load may be applied to the semiconductor chip to cause damage. On the other hand, if the suction height of the semiconductor chip is slightly high, the semiconductor chip is sucked up by the air flow of vacuum suction, and the suction pad cannot accurately pick up the semiconductor chip, resulting in a position shift. However, there was a problem that the suction pad was sucked.
ICハンドラ(測定ロボット)では、事前に行われるティーチング作業において、オペレータが目視にて吸着高さ位置を設定するが、目視では限界があり精度の高い高さ位置をティーチングすることはできず、半導体チップに負荷をかけない最適な高さ位置を簡単な方法でティーチングする方法が望まれている。
そこで、把持部先端部に力センサを設けて目視によらないでティーチングを行う方法が提案されている(特許文献1)。また、把持部側にターゲットを検出する位置検出センサを設けて目視によらないティーチングを行う方法が提案されている(特許文献2)。さらに、把持部に透過式センサを設けて目視によらないティーチングを行う方法が提案されている(特許文献3)。
In IC handlers (measuring robots), the operator sets the suction height position visually in the teaching work that is performed in advance, but there is a limit to the visual inspection, and it is not possible to teach the highly accurate height position. There has been a demand for a method of teaching an optimum height position without applying a load to the chip by a simple method.
Therefore, a method has been proposed in which a force sensor is provided at the tip of the gripping part and teaching is performed without visual inspection (Patent Document 1). In addition, a method has been proposed in which a position detection sensor for detecting a target is provided on the grip portion side to perform teaching without using visual observation (Patent Document 2). Furthermore, a method has been proposed in which a transmission type sensor is provided in the gripping part and teaching is performed without visual inspection (Patent Document 3).
しかし、特許文献1においては、力センサは高価なものであり、サイズも大きくワークに干渉する等して実際には脱着式にしなければならず、非常に使い勝手が悪い。また、特許文献2及び特許文献3においては、センサが検査用ソケットに干渉する、特に、BGAやCSPなどのノンリードタイプの半導体チップでは、ソケットがポケット形状になっているため、半導体チップがソケットに着座(装着)した際、何らかの工夫をしない限り真横からその状態を検出することはできない。
However, in Patent Document 1, the force sensor is expensive, and has a large size and interferes with a workpiece, so that it must actually be detachable, which is very inconvenient. Further, in
また、これら各特許文献では、把持部にティーチングのための治具を新たに追加するため、把持部の構造が複雑化しティーチングのために治具の位置調整が非常に面倒であった。しかも、治具を新たに追加する分高価になる。
そこで、把持部材が半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができるハンドラのティーチング方法として、半導体チップを把持しない状態で、把持部材の下端から気体を噴射させながら、該把持部材をチップ配置位置に予め配置された半導体チップの上面に向かって移動させ、該把持部材から噴射する気体の背圧が予め設定した高い圧力になった時の前記押圧手段の位置を、該把持部材が前記半導体チップと接触する高さ位置とする方法が提案されている(特許文献4)。
In each of these patent documents, since a jig for teaching is newly added to the gripping part, the structure of the gripping part becomes complicated, and the position adjustment of the jig for teaching is very troublesome. Moreover, the cost is increased by adding a new jig.
Therefore, as a teaching method for a handler that can accurately determine the height position at which the gripping member contacts the upper surface of the semiconductor chip with a simple configuration, gas is injected from the lower end of the gripping member without gripping the semiconductor chip. The gripping member is moved toward the upper surface of the semiconductor chip previously arranged at the chip placement position, and the pressing means when the back pressure of the gas injected from the gripping member becomes a preset high pressure A method has been proposed in which the position is a height position at which the gripping member comes into contact with the semiconductor chip (Patent Document 4).
しかしながら、特許文献4に開示された方法は、半導体チップの吸着時に把持部材(吸着パッド)の内部を負圧にする真空供給用バルブとして大気開放ポートを有する真空ポンプ対応ユニットを用いると、気体供給手段から把持部材に供給される気体が真空ポンプ対応ユニットの大気開放ポート側に逃げてしまうため、把持部材の先端を半導体チップの上面に近づけても把持部材の先端から噴射する気体の背圧が予め設定した圧力まで上昇しなくなるという問題があった。 However, in the method disclosed in Patent Document 4, when a vacuum pump compatible unit having an air release port is used as a vacuum supply valve that applies a negative pressure to the inside of the gripping member (suction pad) when the semiconductor chip is sucked, gas supply is performed. Since the gas supplied from the means to the gripping member escapes to the atmosphere release port side of the vacuum pump compatible unit, the back pressure of the gas injected from the tip of the gripping member is not reduced even if the tip of the gripping member is brought close to the upper surface of the semiconductor chip. There was a problem that the pressure did not rise to a preset pressure.
本発明は上記問題を解決するためになされたものであり、その目的は、把持部材を半導体チップの上面に近づけたときに把持部材の先端から噴出する気体の背圧が予め定めた圧力まで上昇しなくても把持部材が半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることのできるハンドラのティーチング方法及びハンドラを提供することにある。 The present invention has been made to solve the above problems, and its purpose is to increase the back pressure of gas ejected from the tip of the gripping member to a predetermined pressure when the gripping member is brought close to the upper surface of the semiconductor chip. An object of the present invention is to provide a handler teaching method and a handler that can determine the height position at which the gripping member comes into contact with the upper surface of the semiconductor chip with a simple configuration without high accuracy.
本発明の一態様のハンドラのティーチング方法は、上下動作する作動体を備えた押圧手段と、前記作動体の下端部に連結され半導体チップを把持する把持部材と、前記押圧手段を上下動させる移動手段と、を備え、前記把持部材に把持した半導体チップをチップ配置位置に配置、又は、チップ配置位置に配置された半導体チップを該把持部材にて把持するハンドラのティーチング方法において、前記半導体チップを把持しない状態で、前記把持部材の下端から気体を噴射させながら、該把持部材をチップ配置位置に予め配置された半導体チップの上面に向かって移動させ、該把持部材から噴射する気体の流量が予め設定した流量まで低下した時の前記押圧手段の位置を、該把持部材が前記半導体チップと接触する高さ位置とすることを特徴とする。 The teaching method of a handler according to one aspect of the present invention includes a pressing unit including an operating body that moves up and down, a gripping member that is connected to a lower end portion of the operating body and grips a semiconductor chip, and a movement that moves the pressing unit up and down. Means for arranging a semiconductor chip held by the holding member at a chip arrangement position, or in a teaching method of a handler for holding the semiconductor chip arranged at the chip arrangement position by the holding member. In a state where the gripping member is not gripped, the gripping member is moved toward the upper surface of the semiconductor chip previously disposed at the chip placement position while gas is ejected from the lower end of the gripping member, and the flow rate of the gas ejected from the gripping member is set in advance. The position of the pressing means when lowered to a set flow rate is a height position at which the gripping member comes into contact with the semiconductor chip, That.
本発明の一態様のハンドラのティーチング方法によれば、把持部材の下端から気体を噴射させながら把持部材をチップ配置位置に配置された半導体チップの上面に向かって移動させ、把持部材の先端が半導体チップの上面の位置まで移動すると、把持部材の先端から噴出している気体が半導体チップにて塞がれることにより、把持部材の先端から噴射する気体の流量が低下する。従って、半導体チップを直接押圧する前に、把持部材が半導体チップとの接触する高さ位置を検出することができることから、半導体チップに大きな負荷を与えることなく、しかも、把持部材を半導体チップの上面に近づけたときに把持部材の先端から噴出する気体の背圧が予め定めた圧力まで上昇しなくても把持部材が半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができる。 According to the teaching method of the handler of one aspect of the present invention, the gripping member is moved toward the upper surface of the semiconductor chip disposed at the chip placement position while gas is ejected from the lower end of the gripping member, and the tip of the gripping member is the semiconductor. When moving to the position of the upper surface of the chip, the gas ejected from the tip of the gripping member is blocked by the semiconductor chip, so that the flow rate of the gas ejected from the tip of the gripping member is reduced. Accordingly, since the height position where the gripping member comes into contact with the semiconductor chip can be detected before the semiconductor chip is directly pressed, the gripping member is placed on the upper surface of the semiconductor chip without applying a large load to the semiconductor chip. Even when the back pressure of the gas ejected from the tip of the gripping member does not rise to a predetermined pressure when it is close to, the height position at which the gripping member contacts the upper surface of the semiconductor chip is obtained with a simple configuration with high accuracy. be able to.
本発明の他の一態様のハンドラのティーチング方法は、弾性部材にて上方に弾性支持された作動体を備えた押圧手段と、前記作動体の下端部に連結され半導体チップを把持する把持部材と、前記押圧手段を上下動させる移動手段と、前記押圧手段に気体を供給し、前記弾性部材にて弾性支持された作動体を、予め定めた最上端位置と最下端位置との間で、該押圧手段に対して上下動させる作動体駆動手段とを備え、前記把持部材に把持した半導体チップをチップ配置位置に配置、又は、チップ配置位置に配置された半導体チップを前記把持部材にて把持するハンドラのティーチング方法において、前記半導体チップを把持しない状態で、前記把持部材の下端から気体を噴射させながら、該把持部材をチップ配置位置に予め配置された半導体チップの上面に向かって移動させ、前記把持部材から噴射する気体の流量が予め設定した流量まで低下した時の前記押圧手段の位置を、該把持部材が該半導体チップと接触する高さ位置とすることを特徴とする。 A handler teaching method according to another aspect of the present invention includes a pressing unit including an operating body elastically supported upward by an elastic member, a gripping member connected to a lower end portion of the operating body, and gripping a semiconductor chip. , A moving means for moving the pressing means up and down, a gas supplied to the pressing means, and an operating body elastically supported by the elastic member between the predetermined uppermost position and lowermost position, And an operating body driving unit that moves up and down with respect to the pressing unit, and the semiconductor chip held by the holding member is arranged at the chip arrangement position, or the semiconductor chip arranged at the chip arrangement position is held by the holding member. In a handler teaching method, a semiconductor chip in which the gripping member is preliminarily disposed at a chip disposition position while gas is ejected from the lower end of the gripping member without gripping the semiconductor chip. The position of the pressing means when the flow rate of the gas ejected from the gripping member is lowered to a preset flow rate is defined as the height position at which the gripping member contacts the semiconductor chip. It is characterized by that.
本発明の他の一態様のハンドラのティーチング方法によれば、把持部材の下端から気体を噴射させながら、把持部材をチップ配置位置に配置された半導体チップの上面に向かって移動させ、把持部材の先端が半導体チップの上面の位置まで移動すると、把持部材の先端から噴出している気体が半導体チップにて塞がれることにより、把持部材の先端から噴射する気体の流量が低下する。従って、半導体チップを直接押圧する前に、把持部材が半導体チップとの接触する高さ位置を検出することができることから、半導体チップに大きな負荷を与えることなく、しかも、把持部材を半導体チップの上面に近づけたときに把持部材の先端から噴出する気体の背圧が予め定めた圧力まで上昇しなくても把持部材が半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができる。
さらに、何らかの原因で、把持部材の先端が半導体チップの上面の位置よりさらに移動しても、把持部材(作動体)が押圧手段に対して相対移動するので、半導体チップを損傷させる虞はない。
According to the teaching method of the handler of another aspect of the present invention, while the gas is injected from the lower end of the gripping member, the gripping member is moved toward the upper surface of the semiconductor chip placed at the chip placement position, When the tip moves to the position of the upper surface of the semiconductor chip, the gas ejected from the tip of the gripping member is blocked by the semiconductor chip, thereby reducing the flow rate of the gas ejected from the tip of the gripping member. Accordingly, since the height position where the gripping member comes into contact with the semiconductor chip can be detected before the semiconductor chip is directly pressed, the gripping member is placed on the upper surface of the semiconductor chip without applying a large load to the semiconductor chip. Even when the back pressure of the gas ejected from the tip of the gripping member does not rise to a predetermined pressure when it is close to, the height position at which the gripping member contacts the upper surface of the semiconductor chip is obtained with a simple configuration with high accuracy. be able to.
Furthermore, even if the tip of the gripping member moves further than the position of the upper surface of the semiconductor chip for some reason, the gripping member (operating body) moves relative to the pressing means, so there is no possibility of damaging the semiconductor chip.
本発明の一態様のハンドラは、上下方向に移動可能な作動体を備えた押圧手段と、前記作動体の下端部に連結され半導体チップを把持する把持部材と、前記押圧手段を上下動させる移動手段と、前記把持部材と前記押圧手段との相対位置を検出する相対位置検出手段と、前記押圧手段の上下移動位置を検出する上下移動位置検出手段と、前記上下移動位置検出手段からの検出信号に基づいて、前記押圧手段の移動位置を演算する上下移動位置演算手段とを備え、前記把持部材に把持した半導体チップをチップ配置位置に配置、又は、チップ配置位置に配置された半導体チップを前記把持部材にて把持するハンドラにおいて、前記把持部材の先端から気体を噴射させる気体供給手段と、前記気体供給手段から供給され、前記把持部材の先端から噴射する気体の流量が予め定めた基準流量まで低下したか否かを検出する流量検出手段と、前記気体供給手段及び前記移動手段を駆動させ、前記把持部材の先端から気体を噴射させながら、該把持部材をチップ配置位置に予め配置された半導体チップに向かって移動させる駆動制御手段と、前記把持部材の先端から噴射される気体の流量が、前記基準流量に達したことを前記流量検出手段が検出した時、前記上下移動位置演算手段が演算した移動位置を、該把持部材が前記半導体チップと接触する高さ位置として記憶手段に登録する登録手段と、を設けたことを特徴とする。 A handler according to an aspect of the present invention includes a pressing unit including an operating body movable in the vertical direction, a gripping member that is connected to a lower end portion of the operating body and grips a semiconductor chip, and a movement that moves the pressing unit up and down. A relative position detecting means for detecting a relative position between the gripping member and the pressing means, a vertical movement position detecting means for detecting a vertical movement position of the pressing means, and a detection signal from the vertical movement position detecting means And a vertical movement position calculation means for calculating the movement position of the pressing means, and the semiconductor chip held by the holding member is arranged at the chip arrangement position, or the semiconductor chip arranged at the chip arrangement position is In the handler gripped by the gripping member, gas supply means for injecting gas from the tip of the gripping member, supplied from the gas supply means, and from the tip of the gripping member The flow rate detection means for detecting whether or not the flow rate of the gas to be sprayed has decreased to a predetermined reference flow rate, the gas supply means and the moving means are driven, and the gas is injected from the tip of the gripping member, The drive control means for moving the gripping member toward the semiconductor chip previously arranged at the chip placement position, and the flow rate detection means that the flow rate of the gas injected from the tip of the gripping member has reached the reference flow rate. And a registration means for registering the movement position calculated by the vertical movement position calculation means in the storage means as a height position at which the gripping member contacts the semiconductor chip when detected.
本発明の一態様のハンドラによれば、把持部材の先端がチップ配置位置に配置された半導体チップの上面に向かって移動すると、把持部材の先端から噴射している気体が、チップ配置位置に配置されている半導体チップに塞がれる。気体の噴射が塞がれることにより、把持部材の先端から噴射する気体の流量が基準流量まで低下し、その低下を流量検出手段が検出する。登録手段は、その時の上下移動位置演算手段が演算した移動位置を、前記把持部材が半導体チップと接触する高さ位置として記憶手段に登録する。
従って、半導体チップに大きな負荷を与えることなく、しかも、把持部材を半導体チップの上面に近づけたときに把持部材の先端から噴出する気体の背圧が予め定めた圧力まで上昇しなくても把持部材が半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができる。
According to the handler of one aspect of the present invention, when the tip of the gripping member moves toward the upper surface of the semiconductor chip placed at the chip placement position, the gas sprayed from the tip of the gripping member is placed at the chip placement position. It is blocked by the semiconductor chip. When the gas injection is blocked, the flow rate of the gas injected from the tip of the gripping member is reduced to the reference flow rate, and the flow rate detecting means detects the decrease. The registration means registers the movement position calculated by the vertical movement position calculation means at that time in the storage means as a height position at which the gripping member comes into contact with the semiconductor chip.
Therefore, the gripping member does not give a large load to the semiconductor chip, and even if the back pressure of the gas ejected from the tip of the gripping member does not rise to a predetermined pressure when the gripping member is brought close to the upper surface of the semiconductor chip. Can be obtained with high accuracy and with a simple configuration.
本発明の他の一態様のハンドラは、弾性部材にて上方向に弾性支持された作動体を備えた押圧手段と、前記作動体の下端部に連結され半導体チップを把持する把持部材と、前記押圧手段を上下動させる移動手段と、前記押圧手段に気体を供給し、前記弾性部材にて弾性支持された作動体を、予め定めた最上端位置と最下端位置との間で、該押圧手段に対して上下動させる作動体駆動手段と、前記把持部材と前記押圧手段との相対位置を検出する相対位置検出手段と、前記押圧手段の上下移動位置を検出する上下移動位置検出手段と、前記上下移動位置検出手段からの検出信号に基づいて、前記押圧手段の移動位置を演算する上下移動位置演算手段と、を備え、前記把持部材に把持した半導体チップをチップ配置位置に配置、又は、チップ配置位置に配置された半導体チップを前記把持部材にて把持するハンドラにおいて、前記把持部材の先端から気体を噴射させる気体供給手段と、前記気体供給手段から供給され、前記把持部材の先端から噴射する気体の流量が予め定めた基準流量まで低下したか否かを検出する流量検出手段と、前記作動体駆動手段、前記気体供給手段及び前記移動手段を駆動制御して、前記作動体を、予め定めた最上端位置と最下端位置との間に配置させるとともに、前記把持部材の先端から気体を噴射させながら、該把持部材をチップ配置位置に予め配置された半導体チップに向かって移動させる駆動制御手段と、前記把持部材の先端から噴射される気体の流量が、前記基準流量に達したことを前記圧力検出手段が検出した時、前記上下移動位置演算手段が演算した移動位置を、該把持部材が前記半導体チップと接触する高さ位置として記憶手段に登録する登録手段と、を設けたことを特徴とする。 A handler according to another aspect of the present invention includes a pressing unit including an operating body elastically supported upward by an elastic member, a gripping member that is connected to a lower end portion of the operating body and grips a semiconductor chip, A moving means for moving the pressing means up and down, a gas supplied to the pressing means, and an operating body elastically supported by the elastic member between the predetermined uppermost position and the lowermost position. An actuating body drive means that moves up and down with respect to the position, a relative position detection means that detects a relative position between the gripping member and the pressing means, a vertical movement position detection means that detects a vertical movement position of the pressing means, And a vertical movement position calculation means for calculating the movement position of the pressing means based on a detection signal from the vertical movement position detection means, and the semiconductor chip held by the holding member is arranged at the chip arrangement position, or the chip Arrangement In a handler that grips the semiconductor chip arranged on the device with the gripping member, gas supply means for injecting gas from the tip of the gripping member, and gas supplied from the gas supply means and jetted from the tip of the gripping member The flow rate detection means for detecting whether or not the flow rate of the gas flow has been reduced to a predetermined reference flow rate, and the actuation body drive means, the gas supply means, and the movement means are driven and controlled to determine the actuation body in advance. A drive control means arranged between the uppermost position and the lowermost position, and moving the gripping member toward a semiconductor chip preliminarily disposed at the chip placement position while injecting gas from the tip of the gripping member; When the pressure detection means detects that the flow rate of the gas injected from the tip of the gripping member has reached the reference flow rate, the vertical movement position calculation means is performed. Was the movement position, wherein the gripping member is provided with a registration means for registering in the storage means as a height position in contact with the semiconductor chip.
本発明の他の一態様のハンドラによれば、把持部材の先端がチップ配置位置に配置された半導体チップの上面に向かって移動すると、把持部材の先端から噴射している気体が、チップ配置位置に配置されている半導体チップに塞がれる。気体の噴射が塞がれることにより、把持部材の先端から噴出する気体の流量が基準流量まで低下し、その低下を流量検出手段が検出する。登録手段は、その時の上下移動位置演算手段が演算した移動位置を、前記把持部材が半導体チップと接触する高さ位置として記憶手段に登録する。 According to the handler of another aspect of the present invention, when the tip of the gripping member moves toward the upper surface of the semiconductor chip placed at the chip placement position, the gas injected from the tip of the gripping member is changed to the chip placement position. The semiconductor chip arranged in the block is blocked. When the gas injection is blocked, the flow rate of the gas ejected from the tip of the gripping member is reduced to the reference flow rate, and the flow rate detecting means detects the decrease. The registration means registers the movement position calculated by the vertical movement position calculation means at that time in the storage means as a height position at which the gripping member comes into contact with the semiconductor chip.
従って、半導体チップに大きな負荷を与えることなく、しかも、把持部材を半導体チップの上面に近づけたときに把持部材の先端から噴出する気体の背圧が予め定めた圧力まで上昇しなくても把持部材が半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができる。
さらに、何らかの原因で、把持部の先端が半導体チップの上面の位置よりさらに移動しても、把持部材(作動体)が押圧手段に対して相対移動するので、半導体チップを損傷させる虞はない。
Therefore, the gripping member does not give a large load to the semiconductor chip, and even if the back pressure of the gas ejected from the tip of the gripping member does not rise to a predetermined pressure when the gripping member is brought close to the upper surface of the semiconductor chip. Can be obtained with high accuracy and with a simple configuration.
Furthermore, even if the tip of the gripping part moves further than the position of the upper surface of the semiconductor chip for some reason, the gripping member (operating body) moves relative to the pressing means, so there is no possibility of damaging the semiconductor chip.
以下、本発明をICハンドラに具体化した第1実施形態を図1〜図7に従って説明する。
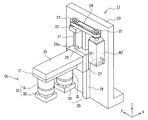
図1は、ICハンドラ10の構成を示す平面図を示す。ICハンドラ10は、ベース101、安全カバー102、高温チャンバ103、供給ロボット104、回収ロボット105、第1スライドテーブル106、第2スライドテーブル107、複数のコンベアC1〜C6を備えている。
Hereinafter, a first embodiment in which the present invention is embodied in an IC handler will be described with reference to FIGS.
FIG. 1 is a plan view showing the configuration of the
ベース101は、その上面に前記要素を搭載している。安全カバー102は、ベース101の大きな領域を囲っていて、この内部には、前記供給ロボット104、回収ロボット105、第1スライドテーブル106及び第2スライドテーブル107が収容されている。
複数のコンベアC1〜C6は、その一端部側が、安全カバー102の外に位置し、他端部が安全カバー102内に位置するように、ベース101に設けられている。各コンベアC1〜C6は、半導体チップとしてのICチップTを複数収容したトレイ108を、安全カバー102の外から安全カバー102の中へ搬送したり、反対に、トレイ108を、安全カバー102の中から安全カバー102の外へ搬送したりする。
The base 101 has the elements mounted on the upper surface thereof. The
The plurality of conveyors C <b> 1 to C <b> 6 are provided on the base 101 so that one end side thereof is located outside the
供給ロボット104は、X軸フレームFXと第1のY軸フレームFY1により構成されている。回収ロボット105は、該X軸フレームFXと第2のY軸フレームFY2により構成されている。X軸フレームFXは、X方向に配置されている。第1のY軸フレームFY1及び第2のY軸フレームFY2は、Y方向に沿って互いに平行となるように配置され、前記X軸フレームFXに対して、X方向に移動可能に支持されている。そして、第1のY軸フレームFY1及び第2のY軸フレームFY2は、X軸フレームFXに設けた図示しないそれぞれのモータによって、該X軸フレームFXに沿ってX方向に往復移動する。
The
第1のY軸フレームFY1の下側には、供給側ロボットハンドユニット110がY方向に移動可能に支持されている。供給側ロボットハンドユニット110は、第1のY軸フレームFY1に設けた図示しないそれぞれのモータによって、該第1のY軸フレームFY1に沿ってY方向に往復移動する。そして、供給側ロボットハンドユニット110は、例えば、コンベアC1の検査前のICチップTを収容したトレイ108を、例えば、第1スライドテーブル106に供給する。
A supply-side
第2のY軸フレームFY2の下側には、回収側ロボットハンドユニット111がY方向に移動可能に支持されている。回収側ロボットハンドユニット111は、第2のY軸フレームFY2に設けた図示しないそれぞれのモータによって、該第2のY軸フレームFY2に沿ってY方向に往復移動する。そして、供給側ロボットハンドユニット110は、例えば、第2スライドテーブル107に供給された検査後のICチップを、例えば、コンベアC8のトレイ108に供給する。
A collection-side robot hand unit 111 is supported below the second Y-axis frame FY2 so as to be movable in the Y direction. The collection-side robot hand unit 111 reciprocates in the Y direction along the second Y-axis frame FY2 by respective motors (not shown) provided on the second Y-axis frame FY2. Then, the supply-side
高温チャンバ103内には、測定ロボット11が設けられている。測定ロボット11は、例えば、第1スライドテーブル106に供給された検査前のICチップTを、検査用ソケット50に装着する。検査用ソケット50に装着されICチップTは、電気的検査が行われる。また、測定ロボット11は、検査用ソケット50に装着された検査終了後のICチップTを、例えば、第2スライドテーブル107に供給する。
A
図2は、測定ロボット11の要部斜視図を示し、測定ロボット11はコンタクトアーム20を備えている。コンタクトアーム20は、測定ロボット11のロボット本体にそれぞれ設けたX軸モータMX、Y軸モータMY(いずれも図5参照)にて、ロボット本体に対して、X,Y方向に往復移動可能に設けられている。
コンタクトアーム20には、移動手段としてのZ軸モータMZが固設されている。Z軸モータMZは、サーボモータよりなり、エンコーダSE1を備え、同エンコーダSE1からの検出信号によって同Z軸モータMZの回転数、回転位置、回転方向が検出されるようになっている。
FIG. 2 is a perspective view of a main part of the
A Z-axis motor MZ as a moving means is fixed to the
コンタクトアーム20であって、Z軸モータMZに隣接した位置には、Z方向(上下方向)に延びたボールネジ21が上下一対の軸受22にて回転可能に支持されている。ボールネジ21の上部の軸受22から突出した部分には従動プーリ23が固着されている。従動プーリ23は、連結ベルト24を介してZ軸モータMZの回転軸に固着した駆動プーリ25と駆動連結されている。従って、Z軸モータMZが正逆回転すると、ボールネジ21は駆動プーリ25、連結ベルト24、従動プーリ23を介して正逆回転する。
A
コンタクトアーム20であって、Z軸モータMZとボールネジ21の間には、Z方向(上下方向)に延びたガイドレール26が固設されている。ガイドレール26には、同ガイドレール26に沿って移動可能に設けられたキャリッジ27が設けられ、そのキャリッジ27には連結部材28が設けられている。連結部材28には、前記ボールネジ21が螺合する雌ネジが形成された螺合部28aが設けられている。従って、Z軸モータMZ(ボールネジ21)が正逆回転すると、ボールネジ21と螺合する連結部材28(キャリッジ27)は、ガイドレール26に沿って移動可能なことから、コンタクトアーム20に対してZ方向(上下方向)に往復移動する。
In the
連結部材28には、取付板29が連結固定されている。取付板29は、連結部材28から反X方向(前方)に延び、その下面に、前後一対のコンプライアンスユニットCUが設けられている。
コンプライアンスユニットCUは、複数個(図2では2個)の押圧装置30を備えている。押圧装置30は、半導体チップとしてのICチップT(図3参照)を把持(吸着保持)して、テスタヘッド12に設けた検査用ソケット50(図3参照)に押圧するものであって、取付板29の下面に固設されている。本実施形態では、2個の押圧装置30を備えたことによって、一度に2個のICチップTを保持搬送する。尚、コンプライアンスユニットCUは、取付板29に対して着脱可能に連結され、検査対象のICチップTの数や配置に応じて適宜交換可能になっている。
A mounting
The compliance unit CU includes a plurality of (two in FIG. 2) pressing
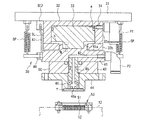
次に、押圧手段としての押圧装置30について図3に従って説明する。
図3において、押圧装置30は、連結ベース31に固設されたエアシリンダSLと、そのエアシリンダSLの先端部に連結されたデバイスチャックDCとから構成されている。
エアシリンダSLは、シリンダチューブ32の基端部が連結ベース31に固着されている。シリンダチューブ32は、有底筒状のチューブ本体32aと、チューブ本体32aの開口を塞ぐフロントプレート32bとからなり、チューブ本体32aとフロントプレート32bとで形成されるシリンダ室内に作動体としてのピストン33がZ方向(上下方向)に移動可能に配設されている。従って、シリンダ室は、ピストン33によって、上側に第1室a、下側に第2室bとに区画される。
Next, the
In FIG. 3, the
In the air cylinder SL, the base end portion of the
ピストン33は、後述する弾性部材としてのスプリングSPによって、上方に持ち上げられ、ピストン33の第1室a側の面が、図3に示す、チューブ本体32aの底面と当接する位置(以下、これを最上端位置という)に位置するようになっている。
チューブ本体32aの第1室a側の端部には、エアー導入口34が形成され、そのエアー導入口34には、第1連結ポートP1が取着されている。第1連結ポートP1は、エアー供給管R1(図4参照)を介して電空レギュレータ61(図4参照)に連結されている。そして、電空レギュレータ61からエアーが第1室aに供給されると、ピストン33は、そのエアーの圧力によって、チューブ本体32aの底面と当接した最上端位置から、デバイスチャックDCのスプリングSPの弾性力に抗して、下方に移動するようになっている。
The piston 33 is lifted upward by a spring SP as an elastic member, which will be described later, and the position of the piston 33 on the first chamber a side is in contact with the bottom surface of the tube
An
ちなみに、ピストン33のストローク量は、ピストン33が図2に実線で示す最上端位置にある時の、ピストン33の下面がフロントプレート32bの内側面に当接する位置(最下端位置)までの距離、即ち、図2に示す第2室bの上下方向の間隔と一致する。
デバイスチャックDCは、連結ブロック41を備え、その上面に形成した連結凸部41aがフロントプレート32bに形成した貫通穴を介して、ピストン33とネジNで連結固定されている。従って、連結ブロック41(デバイスチャックDC)は、ピストン33とともに上下方向に移動する。
Incidentally, the stroke amount of the piston 33 is the distance to the position (lowermost position) where the lower surface of the piston 33 contacts the inner surface of the
The device chuck DC includes a
また、連結ブロック41と連結ベース31の間には、スプリングSPが連結されている。つまり、連結ブロック41は、連結ベース31に対して、スプリングSPを介して弾性的に吊下されている。そして、本実施形態では、スプリングSPは、連結ブロック41を介して、ピストン33が最上端位置に位置するように、ピストン33を、押し上げている。そして、第1室aにエアーが供給されると、その圧力によって、ピストン33はスプリングSPの弾性力に抗して、下方に移動し、やがて、最下端位置に到達してフロントプレート32bに当接し下方への移動が規制される。
A spring SP is connected between the
連結ブロック41には、下面中央位置が凹設され、その凹設した位置から外側面に向かって貫通孔を形成されることによって、真空案内路42が形成されている。そして、連結ブロック41の外側面の真空案内路42には、第2連結ポートP2が取着されている。
連結ブロック41の下側には、中間ブロック43が連結固着され、その中間ブロック43の下側にはガイドブロック44が連結固着されている。中間ブロック43及びガイドブロック44の中央位置には、連結ブロック41に形成した真空案内路42と連通する収容穴がそれぞれ貫通形成され、それら収容穴には吸引管45が配設されている。
The
An
吸引管45の先端部には、ICチップTを吸引する吸引口46aを有する吸着パッド46が連結固着されている。そして、吸引管45内を負圧に状態にすることによって、吸着パッド46は、図3に示すように、ICチップTを吸着保持するようになっている。反対に、吸引管45内の負圧を解除することによって、吸着パッド46は、吸着保持しているICチップTを、例えば、テスタヘッド12に設けた検査用ソケット50に配置する。
A
連結ブロック41の外側面には、被検出片47がボルト48にて固定されている。被検出片47は、その先端部が連結ベース31に固設された相対位置検出手段としてのホトカプラよりなる相対位置検出センサSE2にて検出されるようになっている。詳述すると、相対位置検出センサSE2は、ピストン33(デバイスチャックDC)の上下方向の移動とともに上下動する被検出片47の移動位置、すなわち、ピストン33(デバイスチャックDC)とシリンダチューブ32との相対位置を検出する。
なお、本実施形態では、相対位置検出センサSE2の検出信号は、ピストン33が、最上端位置と最下端位置の中間位置を、最上端位置側から最下端位置側に通過する時、「オフ」信号から「オン」信号に切り替り、反対に、中間位置を、最下端位置側から最上端位置側に通過する時、「オン」信号から「オフ」信号に切り替るように設定してある。
A detected
In the present embodiment, the detection signal of the relative position detection sensor SE2 is “off” when the piston 33 passes the intermediate position between the uppermost end position and the lowermost position from the uppermost position side to the lowermost position side. The signal is switched from the “ON” signal to the “OFF” signal when the signal is switched from the “ON” signal to the “ON” signal.
テスタヘッド12には、図3に示すように、検査用ソケット50が設けられている。検査用ソケット50は、上端に接触部51を有するスプリングピン52が、ICチップTの端子の数だけ設けられている。スプリングピン52は、検査用ソケット50に対して所定のストロークで上下動作をする。そして、ICチップTが下方に押し下げられると、ICチップTの各端子が、上方からそれぞれ対応する接触部51と当接しスプリングピン52を下方に押し下げられる。
これによって、ICチップTの各端子と検査用ソケット50の接触部51とが電気的に接触し、その状態で電気的検査が行われる。そして、検査終了後、デバイスチャックDCにより検査済のICチップTが検査用ソケット50から取り上げられ、その検査結果に応じて図示しない収納部へと搬送される。
As shown in FIG. 3, the
As a result, each terminal of the IC chip T and the
次に、上記のように構成した測定ロボット11の空圧回路について図4に従って説明する。
図4において、作動体駆動手段としての電空レギュレータ61は、エアー供給管R1を介して第1連結ポートP1に連結され、シリンダチューブ32の第1室aにエアーを供給するとともに、その第1室a内のエアーの圧力を調整する。そして、第1室a内のエアーの圧力によって、ピストン33は、スプリングSPの弾性力に抗して、シリンダチューブ32に対して上下動する。
Next, the pneumatic circuit of the measuring
In FIG. 4, an
ICチップTを吸着するときに吸着パッド46の内部を負圧にする真空発生器対応ユニット62は直列に接続された二つの真空発生器621,622を有し、これらの真空発生器621,622のうち下流側の真空発生器621には、気体供給手段としての正圧回路63から圧縮空気等の加圧気体が電磁バルブB1を介して供給されるようになっている。
真空発生器対応ユニット62の真空発生器621は吸引ポート621aを有し、この吸引ポート621に、第2連結ポートP2が吸気管R2およびフィルタFを介して接続されている。一方、真空発生器対応ユニット62の真空発生器622は吸引ポート622aを有し、この吸引ポート622aに、第2連結ポートP2が吸気管R2、フィルタFおよび逆止弁B3を介して接続されている。
The vacuum
The
気体供給手段としての正圧回路63は、気体供給管R3、電磁バルブB2および吸気管R2を介して第2連結ポートP2に連結されている。正圧回路63は、吐出ポンプを備え、正圧源を生成する。そして、正圧回路63は、第2連結ポートP2に連通する真空案内路42内を正圧の状態にすることによって、吸着パッド46から圧縮空気などの気体を噴射させるようになっている。
The
第2連結ポートP2と電磁バルブB2との間の配管R2には、吸着パッド46の吸引口46aから吐出する気体(例えば圧縮空気)の流量を検出する流量検出手段としての流量センサ65が設けられている。本実施形態では、正圧回路63にて、吸引管45内を正圧の状態にして吸着パッド46から圧縮空気等の気体を噴射させているときに、吸着パッド46の吸引口46aが徐々に塞がれて行く時に吸引口46aから吐出する気体の流量が次第に低下する。
The pipe R2 between the second connection port P2 and the electromagnetic valve B2 is provided with a
次に、測定ロボット11の電気的構成を同じく図5に従って説明する。
図5において、駆動制御手段、作動体移動制御手段、押圧手段移動制御手段としての制御装置70は、CPU70A、ROM70B、RAM70Cを有している。制御装置70は、格納された各種データ及び各種制御プログラムに従って、検査用ソケット50に検査前のICチップTを装着する処理、検査後のICチップTを検査用ソケット50から吸着把持して取り外す処理、押圧装置30(吸着パッド46)が検査用ソケット50に装着されたICチップTと接触する高さ位置をティーチングする処理等を実行する。
Next, the electrical configuration of the measuring
In FIG. 5, a
制御装置70には、各種操作スイッチとディスプレイを有した入出力装置71が接続されている。入出力装置71は、測定ロボット11が実行する各種処理の処理状況を表示する。入出力装置71は、前記各処理の実行開始を指令する信号や、各処理を実行するための初期値データ等を制御装置70に入力する。
制御装置70には、電空レギュレータ駆動回路72が接続されている。制御装置70は、駆動制御信号を電空レギュレータ駆動回路72に出力する。電空レギュレータ駆動回路72は、制御装置70からの駆動制御信号に応答して電空レギュレータ61を駆動させて、シリンダチューブ32の第1室aにエアーを供給し、第1室a内のエアーの圧力を調整する。
An input /
An electropneumatic
制御装置70には、電磁バルブ駆動回路73が接続されている。制御装置70は、電磁バルブ駆動回路73に駆動制御信号を出力する。電磁バルブ駆動回路73は、制御装置70からの駆動制御信号に応答して、電磁バルブB1および切換電磁バルブB2をそれぞれ切換え制御する。
例えば、制御装置70は、ICチップTを吸着する場合には、電磁バルブB1を開き、電磁バルブB2を閉じるように制御する。つまり、真空発生器621,622にて吸引管45内を負圧にして吸着パッド46がICチップTを吸着保持できるようにする。また、制御装置70は、検査用ソケット50の装着されたICチップTの上面に吸着パッド46が接触する際の押圧装置30(吸着パッド46)の高さ位置を求めるティーチング動作では、電磁バルブB2を開き、電磁バルブB1を閉じるように制御する。つまり、正圧回路63にて吸引管45内を正圧に状態にして吸着パッド46から加圧気体を噴射させるようになっている。
An electromagnetic valve drive circuit 73 is connected to the
For example, when adsorbing the IC chip T, the
制御装置70には、X軸モータ駆動回路75が接続されている。制御装置70は、駆動制御信号をX軸モータ駆動回路75に出力する。X軸モータ駆動回路75は、制御装置70からの駆動制御信号に応答してX軸モータMXを正逆回転させて、コンタクトアーム20をロボット本体に対して、X方向に往復移動させるようになっている。
制御装置70には、Y軸モータ駆動回路76が接続されている。制御装置70は、駆動制御信号をY軸モータ駆動回路76に出力する。Y軸モータ駆動回路76は、制御装置70からの駆動制御信号に応答してY軸モータMYを正逆回転させて、コンタクトアーム20をロボット本体に対して、Y方向に往復移動させるようになっている。
An X-axis
A Y-axis
制御装置70には、Z軸モータ駆動回路77が接続されている。制御装置70は、駆動制御信号をZ軸モータ駆動回路77に出力する。Z軸モータ駆動回路77は、制御装置70からの駆動制御信号に応答してZ軸モータMZを正逆回転させて、コンタクトアーム20(ロボット本体)に対して押圧装置30を上下動させる。
制御装置70には、エンコーダSE1が接続されている。制御装置70は、エンコーダSE1からの検出信号を入力して、押圧装置30(吸着パッド46)のコンタクトアーム20に対する相対位置を算出する。詳述すると、制御装置70は、算出した相対位置に基づいて、検査用ソケット50に装着したICチップTの上面に吸着パッド46の吸着面が接触する時の、押圧装置30(吸着パッド46)の高さ位置を演算しRAM70Cに登録する。
A Z-axis
An encoder SE1 is connected to the
制御装置70には、相対位置検出センサSE2が接続されている。制御装置70は、相対位置検出センサSE2からのオン・オフの検出信号を入力して、ピストン33(デバイスチャックDC)とシリンダチューブ32との相対位置を検出する。詳述すると、制御装置70は、検出信号に基づいて、ピストン33が、最上端位置と最下端位置の中間位置を、最上端位置側から最下端位置側に通過したか、反対に、中間位置を、最下端位置側から最上端位置側に通過したかどうかを判断するようになっている。
A relative position detection sensor SE2 is connected to the
制御装置70には、流量センサ65が接続されている。制御装置70は、流量センサ65からの信号を入力して、吸着パッド46を下降させるときに吸着パッド46の吸引口46aから吐出する加圧気体の流量を検出する。詳述すると、制御装置70は、検出信号に基づいて、吸着パッド46の下端から噴射する気体の流量が予め定めた基準流量まで低下すると、吸着パッド46の吸引口46aがICチップTに接触して塞がれたと判断するようになっている。
A
次に、上記のように構成した、測定ロボット11の検査用ソケット50に装着されたICチップTの上面に吸着パッド46が接触する際の高さ位置を求めるティーチング処理動作を図6に示す制御装置70の動作を示すフローチャートに従って説明する。
いま、検査用ソケット50に、ICチップTが予め検査用ソケット50に装着される。この時、電磁バルブB1、電磁バルブB2は、全て閉じた状態にある。また、ピストン33は、最上端位置に配置されている。
Next, the teaching processing operation for obtaining the height position when the
Now, the IC chip T is mounted in the
この状態から、検査用ソケット50に、ICチップTの上面に吸着パッド46が接触する際の高さ位置をティーチングを行うべく、入出力装置71からティーチングのためのスタート信号を出力する。
制御装置70は、まず、X軸モータMX、Y軸モータMY、Z軸モータMZを駆動制御して、押圧装置30、即ち、吸着パッド46を、ティーチング対象の検査用ソケット50に装着されたICチップTの予め定めた直上位置に案内する(ステップS1−1)。
吸着パッド46がICチップTの予め定めた直上位置に案内されると、制御装置70は、電空レギュレータ61を制御して、シリンダチューブ32の第1室aにエアーを供給してピストン33を下動させる(ステップS1−2)。
From this state, a teaching start signal is output from the input /
First, the
When the
この時、制御装置70は、相対位置検出センサSE2の検出信号が「オフ」信号から「オン」信号に切り替るまで(ステップS1−3)、シリンダチューブ32の第1室aにエアーを供給する。相対位置検出センサSE2の検出信号が「オフ」信号から「オン」信号に切り替ると(ステップS1−3でYES)、制御装置70は、電空レギュレータ61を制御して、シリンダチューブ32の第1室aへのエアーの供給を停止する(ステップS1−4)。すなわち、制御装置70は、ピストン33を、最上端位置と最下端位置の中間位置で停止させる。
At this time, the
次に、制御装置70は、電磁バルブB2を開き、正圧回路63と第2連結ポートP2を繋ぎ、吸引管45内を正圧に状態にして吸着パッド46からエアーを噴射させる(ステップS1−5)。続いて、制御装置70は、Z軸モータMZを駆動制御して、押圧装置30(吸着パッド46)を、直下に位置する検査用ソケット50に装着されたICチップTに向かって下動させる(ステップS1−6)。
Next, the
この下動中は、エンコーダSE1からの検出信号に基づいて、制御装置70は、その時々の押圧装置(吸着パッド46)の高さ位置を演算している。
制御装置70は、吸着パッド46からエアーを噴射させながら、押圧装置30(吸着パッド46)を下動させているとき、流量センサ65から出力された信号を取り込み、吸着パッド46の先端(吸引口46a)から噴出する気体の流量を検出する(ステップS1−7)。
During this downward movement, the
The
そして、図7に示すように、やがて、吸着パッド46が、ICチップTの上面に接触する。吸着パッド46がICチップTの上面に接触すると、吸着パッド46の吸引口46aが塞がれる。吸着パッド46がICチップTの上面に近づくと、吸引口46aから吐出する気体の流量が次第に減少し、吸引口46aから吐出する気体の流量が予め定めた基準量まで低下すると、制御装置70は吸着パッド46がICチップTの上面に接触したと判断する(ステップS1−8,S1−9)。そして、制御装置70は、その時までにエンコーダSE1からの検出信号に基づいて、演算した押圧装置(吸着パッド46)の高さ位置を、RAM70Cに記憶するとともに、高さ位置を入出力装置71に出力してディスプレイに表示する(ステップS1−9)。
Then, as shown in FIG. 7, the
続いて、制御装置70は、一つの検査用ソケット50における吸着パッド46の吸着高さ位置が登録されると、電磁バルブB2を閉じて吸着パッド46からの気体の噴射を停止させる(ステップS1−10)。続いて、制御装置70は、Z軸モータMZを逆転させ、押圧装置(吸着パッド46)を予め定めた所定の上方位置まで上動させる(ステップS1−11)。
そして、制御装置70は、押圧装置30を予め定めた上方位置まで上動させると、一つの検査用ソケット50における吸着パッド46の吸着高さ位置のティーチングを終了する。
Subsequently, when the suction height position of the
Then, when the
次に、上記のように構成した実施形態の効果を以下に記載する。
(1)上記実施形態によれば、吸着パッド46から気体を噴射させながら、吸着パッド46を検査用ソケット50に予め配置したICチップTの上面に向かって下動させた。そして、吸着パッド46がICチップTの上面に接触した時、吸着パッド46から噴射している気体が、ICチップTにて塞がれることにより、吸着パッド46の吸引口46aから吐出する気体の流量が低下するのを流量センサ65にて検出するようにした。従って、流量センサ65により検出された気体の流量が予め定めた基準流量まで減少したか否かを判断することにより、吸着パッド46がICチップTの上面に接触することが検知でき、その時の高さ位置を制御装置70は検出することができる。しかも、吸着パッド46から気体を噴射させながら下動させて、吸着パッド46の吸引口46aから吐出する気体の流量を流量センサ65で検出するだけの簡単な方法で、吸着パッド46がICチップTを吸着する吸着高さ位置を高精度に検出ができる。
また、吸着パッド46をICチップTの上面に近づけたときに吸着パッド46から噴出する気体の背圧が上昇しなくても吸着パッド46をICチップTの上面に接触する高さ位置を、簡単な構成で高精度に求めることができる、
Next, effects of the embodiment configured as described above will be described below.
(1) According to the above-described embodiment, the
Further, when the
(2)上記実施形態によれば、吸着パッド46から気体を噴射させながら下動させて、吸着パッド46から噴出する気体の流量を流量センサ65で検出する。すなわち、既存の吸着パッド46と配管R2(吸引管45)等を利用した。言い換えれば、電磁バルブB1、電磁バルブB2を切換ることによって、吸着パッド46を本来のICチップTの吸着の他に、ティーチング処理動作にも使用することができるようにした。従って、押圧装置30にティーチングに使用する特別な治具を新たに設けなくてもよく、非常に簡単な構成でかつ高精度の高さ位置の検出ができる。
(2) According to the above embodiment, the
(3)上記実施形態によれば、ICチップTを吸着する吸着高さ位置を検出するとき、ピストン33をシリンダチューブ32に対して中間位置に配置した状態で行った。従って、何らかの原因で、吸着パッド46がICチップTの上面の位置よりさらに下方に移動しても、ピストン33がシリンダチューブ32に対して上動することから、ICチップTには大きな負荷がかからず、損傷する虞はない。
(3) According to the above-described embodiment, when the suction height position for sucking the IC chip T is detected, the piston 33 is disposed in an intermediate position with respect to the
尚、上記実施形態は以下のように変更してもよい。
上記実施形態では、押圧装置30を下動させる際、電空レギュレータ61からエアーを供給してピストン33を最上端位置と最下端位置の中間位置に移動させて実施したが、その中間位置には限定されず、最上端位置と最下端位置の間であるならばどの位置でもよい。
上記実施形態では、検査用ソケット50に配置されたICチップTの上面の高さ位置を求めたが、これに限定されるものではなく、検査前のICチップが収容されている供給トレイのポケットでのICチップの上面の高さ位置の検出に応用したり、検査後のICチップが収容されている回収トレイのポケットでのICチップの上面の高さ位置の検出に応用してもよい。
In addition, you may change the said embodiment as follows.
In the above embodiment, when the
In the above embodiment, the height position of the upper surface of the IC chip T arranged in the
さらに、ICハンドラに設けられるホットプレートのポケットでのICチップの上面の高さ位置の検出に応用したり、検査用ソケット50に配置される前に、待機させておくためのポケットや、回収トレイに搬送する前に、待機させておくためのポケットでのICチップの上面の高さ位置の検出に応用してもよい。
・上記実施形態では、デバイスチャックDCの連結ブロック41と連結ベース31の間にスプリングSPを連結し、ピストン33(デバイスチャックDC)を弾性支持している。これを、ピストン33の下面とシリンダチューブ32のフロントプレート32bとの間に、弾性部材を配置して、ピストン33(デバイスチャックDC)を弾性支持するようにしてもよい。もちろん、上記実施形態のスプリングSPに加えて、ピストン33の下面とシリンダチューブ32のフロントプレート32bとの間に弾性部材を配置して実施してもよい。
Further, it can be applied to the detection of the height position of the upper surface of the IC chip in the pocket of the hot plate provided in the IC handler, or can be kept on standby before being placed in the
In the above embodiment, the spring SP is coupled between the
また、特に、上記実施形態において、ピストン33(デバイスチャックDC)をスプリングSPで弾性支持しない測定ロボットを備えたICハンドラに応用してもよい。
・上記各実施形態では、吸着パッド46を図3及び図7に示すように、リップ形状にした。これを、ICチップTは平坦であれば、吸着パッド46の形状は、ICチップの外形サイズに合わせた突起を付けた樹脂や金属の吸着パッドであっても良い。即ち、ICチップTの上面に接触した時には該突起のみが真っ先に接触することにより、第1実施形態では圧力を上昇させたり、第2実施形態ではピストン33が上動を開始させる吸着パッド形状としてもよい。
In particular, in the above-described embodiment, the present invention may be applied to an IC handler including a measurement robot that does not elastically support the piston 33 (device chuck DC) with the spring SP.
In each of the above embodiments, the
・上記実施形態では、デバイスチャックDC(吸着パッド46)を、エアシリンダSLにて上下動させたが、これに限定されるものではない。例えば、ダイヤフラムやベローズ等でデバイスチャックDC(吸着パッド46)を上下動させるようにしてもよい。
・上記実施形態では、ICハンドラに設けた測定ロボット11に具体化したが、これに限定されるものではなく、例えば、ICチップを、第1の配置位置から第2の配置位置に搬送するための搬送装置に応用してもよい。
・上記実施形態では、真空発生器対応ユニットを使用したが、大気開放ポートAPを持つ真空ポンプ対応ユニット64(図8参照)を使用してもよい。なお、図8において、641は真空供給用パイロットバルブ、642は真空供給バルブ、642は真空破壊用パイロットバルブ、66は真空源、AFはバルブ用フィルタである。
-In above-mentioned embodiment, although device chuck DC (adsorption pad 46) was moved up and down with air cylinder SL, it is not limited to this. For example, the device chuck DC (suction pad 46) may be moved up and down with a diaphragm or a bellows.
In the above embodiment, the
In the above embodiment, the vacuum generator-compatible unit is used, but a vacuum pump-compatible unit 64 (see FIG. 8) having an air release port AP may be used. In FIG. 8, 641 is a vacuum supply pilot valve, 642 is a vacuum supply valve, 642 is a vacuum breaking pilot valve, 66 is a vacuum source, and AF is a valve filter.
10…ICハンドラ、11…測定ロボット、30…押圧装置、32…シリンダチューブ、32…シリンダチューブ、32a…チューブ本体、33…ピストン、46…吸着パッド、47…検出片、50…検査用ソケット、61…電空レギュレータ、62…真空発生器対応ユニット、63…正圧回路、65…流量センサ、70…制御装置、70A…CPU、70B…ROM、70C…RAM、DC…デバイスチャック、B1,B2…電磁バルブ、MZ…Z軸モータ、SE1…エンコーダ、SE2…相対位置検出センサ、SL…エアシリンダ、SP…スプリング、T…ICチップ。
DESCRIPTION OF
Claims (4)
前記作動体の下端部に連結され半導体チップを把持する把持部材と、
前記押圧手段を上下動させる移動手段と、
を備え、前記把持部材に把持した半導体チップをチップ配置位置に配置、又は、チップ配置位置に配置された半導体チップを該把持部材にて把持するハンドラのティーチング方法において、
前記半導体チップを把持しない状態で、前記把持部材の下端から気体を噴射させながら、該把持部材をチップ配置位置に予め配置された半導体チップの上面に向かって移動させ、該把持部材から噴射する気体の流量が予め設定した流量まで低下した時の前記押圧手段の位置を、該把持部材が前記半導体チップと接触する高さ位置とすることを特徴とするハンドラのティーチング方法。 A pressing means comprising an operating body that moves up and down;
A holding member connected to the lower end of the operating body and holding the semiconductor chip;
Moving means for moving the pressing means up and down;
In the teaching method of the handler for holding the semiconductor chip held by the holding member at the chip arrangement position, or holding the semiconductor chip arranged at the chip arrangement position by the holding member,
Gas that is ejected from the gripping member by moving the gripping member toward the top surface of the semiconductor chip previously disposed at the chip placement position while ejecting gas from the lower end of the gripping member without gripping the semiconductor chip A method of teaching a handler, characterized in that the position of the pressing means when the flow rate decreases to a preset flow rate is a height position at which the gripping member contacts the semiconductor chip.
前記作動体の下端部に連結され半導体チップを把持する把持部材と、
前記押圧手段を上下動させる移動手段と、
前記押圧手段に気体を供給し、前記弾性部材にて弾性支持された作動体を、予め定めた最上端位置と最下端位置との間で、該押圧手段に対して上下動させる作動体駆動手段とを備え、前記把持部材に把持した半導体チップをチップ配置位置に配置、又は、チップ配置位置に配置された半導体チップを前記把持部材にて把持するハンドラのティーチング方法において、
前記半導体チップを把持しない状態で、前記把持部材の下端から気体を噴射させながら、該把持部材をチップ配置位置に予め配置された半導体チップの上面に向かって移動させ、前記把持部材から噴射する気体の流量が予め設定した流量まで低下した時の前記押圧手段の位置を、該把持部材が該半導体チップと接触する高さ位置とすることを特徴とするハンドラのティーチング方法。 A pressing means comprising an operating body elastically supported upward by an elastic member;
A holding member connected to the lower end of the operating body and holding the semiconductor chip;
Moving means for moving the pressing means up and down;
Actuator driving means for supplying gas to the pressing means and causing the operating body elastically supported by the elastic member to move up and down relative to the pressing means between a predetermined uppermost position and lowermost position. In the teaching method of the handler that holds the semiconductor chip held by the holding member at the chip arrangement position, or holds the semiconductor chip arranged at the chip arrangement position by the holding member,
Gas that is ejected from the gripping member by moving the gripping member toward the top surface of the semiconductor chip that is previously disposed at the chip placement position while ejecting gas from the lower end of the gripping member without gripping the semiconductor chip A method of teaching a handler, characterized in that the position of the pressing means when the flow rate decreases to a preset flow rate is a height position at which the gripping member contacts the semiconductor chip.
前記作動体の下端部に連結され半導体チップを把持する把持部材と、
前記押圧手段を上下動させる移動手段と、
前記把持部材と前記押圧手段との相対位置を検出する相対位置検出手段と、
前記押圧手段の上下移動位置を検出する上下移動位置検出手段と、
前記上下移動位置検出手段からの検出信号に基づいて、前記押圧手段の移動位置を演算する上下移動位置演算手段と
を備え、前記把持部材に把持した半導体チップをチップ配置位置に配置、又は、チップ配置位置に配置された半導体チップを前記把持部材にて把持するハンドラにおいて、
前記把持部材の先端から気体を噴射させる気体供給手段と、
前記気体供給手段から供給され、前記把持部材の先端から噴射する気体の流量が予め定めた基準流量まで低下したか否かを検出する流量検出手段と、
前記気体供給手段及び前記移動手段を駆動させ、前記把持部材の先端から気体を噴射させながら、該把持部材をチップ配置位置に予め配置された半導体チップに向かって移動させる駆動制御手段と、
前記把持部材の先端から噴射される気体の流量が、前記基準流量に達したことを前記流量検出手段が検出した時、前記上下移動位置演算手段が演算した移動位置を、該把持部材が前記半導体チップと接触する高さ位置として記憶手段に登録する登録手段と、
を設けたことを特徴とするハンドラ。 A pressing means comprising an operating body movable in the vertical direction;
A holding member connected to the lower end of the operating body and holding the semiconductor chip;
Moving means for moving the pressing means up and down;
A relative position detecting means for detecting a relative position between the gripping member and the pressing means;
A vertical movement position detecting means for detecting a vertical movement position of the pressing means;
A vertical movement position calculation means for calculating the movement position of the pressing means based on a detection signal from the vertical movement position detection means, and a semiconductor chip held by the holding member is arranged at a chip arrangement position, or a chip In the handler that grips the semiconductor chip placed at the placement position with the gripping member,
Gas supply means for injecting gas from the tip of the gripping member;
A flow rate detection means for detecting whether or not the flow rate of the gas supplied from the gas supply means and ejected from the tip of the gripping member has decreased to a predetermined reference flow rate;
Drive control means for driving the gas supply means and the moving means to move the gripping member toward a semiconductor chip previously disposed at a chip placement position, while jetting gas from the tip of the gripping member;
When the flow rate detecting means detects that the flow rate of the gas injected from the tip of the gripping member has reached the reference flow rate, the gripping member is the semiconductor position calculated by the vertical movement position calculating means. Registration means for registering in the storage means as the height position in contact with the chip;
A handler characterized by providing
前記作動体の下端部に連結され半導体チップを把持する把持部材と、
前記押圧手段を上下動させる移動手段と、
前記押圧手段に気体を供給し、前記弾性部材にて弾性支持された作動体を、予め定めた最上端位置と最下端位置との間で、該押圧手段に対して上下動させる作動体駆動手段と、
前記把持部材と前記押圧手段との相対位置を検出する相対位置検出手段と、
前記押圧手段の上下移動位置を検出する上下移動位置検出手段と、
前記上下移動位置検出手段からの検出信号に基づいて、前記押圧手段の移動位置を演算する上下移動位置演算手段と、
を備え、前記把持部材に把持した半導体チップをチップ配置位置に配置、又は、チップ配置位置に配置された半導体チップを前記把持部材にて把持するハンドラにおいて、
前記把持部材の先端から気体を噴射させる気体供給手段と、
前記気体供給手段から供給され、前記把持部材の先端から噴射する気体の流量が予め定めた基準流量まで低下したか否かを検出する流量検出手段と、
前記作動体駆動手段、前記気体供給手段及び前記移動手段を駆動制御して、前記作動体を、予め定めた最上端位置と最下端位置との間に配置させるとともに、前記把持部材の先端から気体を噴射させながら、該把持部材をチップ配置位置に予め配置された半導体チップに向かって移動させる駆動制御手段と、
前記把持部材の先端から噴射される気体の流量が、前記基準流量に達したことを前記圧力検出手段が検出した時、前記上下移動位置演算手段が演算した移動位置を、該把持部材が前記半導体チップと接触する高さ位置として記憶手段に登録する登録手段と、
を設けたことを特徴とするハンドラ。 A pressing means including an operating body elastically supported upward by an elastic member;
A holding member connected to the lower end of the operating body and holding the semiconductor chip;
Moving means for moving the pressing means up and down;
Actuator driving means for supplying gas to the pressing means and causing the operating body elastically supported by the elastic member to move up and down relative to the pressing means between a predetermined uppermost position and lowermost position. When,
A relative position detecting means for detecting a relative position between the gripping member and the pressing means;
A vertical movement position detecting means for detecting a vertical movement position of the pressing means;
Based on a detection signal from the vertical movement position detection means, a vertical movement position calculation means for calculating the movement position of the pressing means;
In a handler that holds a semiconductor chip held by the holding member at a chip arrangement position, or holds a semiconductor chip arranged at a chip arrangement position by the holding member,
Gas supply means for injecting gas from the tip of the gripping member;
A flow rate detection means for detecting whether or not the flow rate of the gas supplied from the gas supply means and ejected from the tip of the gripping member has decreased to a predetermined reference flow rate;
The operating body driving means, the gas supply means, and the moving means are driven and controlled to dispose the operating body between a predetermined uppermost position and a lowermost position, and gas from the tip of the gripping member. Driving control means for moving the gripping member toward the semiconductor chip previously arranged at the chip arrangement position,
When the pressure detecting means detects that the flow rate of the gas injected from the tip of the gripping member has reached the reference flow rate, the gripping member is the semiconductor position calculated by the vertical movement position calculating means. Registration means for registering in the storage means as the height position in contact with the chip;
A handler characterized by providing
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011022492A JP2011101048A (en) | 2011-02-04 | 2011-02-04 | Method of teaching handler, and handler |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011022492A JP2011101048A (en) | 2011-02-04 | 2011-02-04 | Method of teaching handler, and handler |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009003969A Division JP4683129B2 (en) | 2009-01-09 | 2009-01-09 | Handler teaching method and handler |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011101048A true JP2011101048A (en) | 2011-05-19 |
| JP2011101048A5 JP2011101048A5 (en) | 2012-02-16 |
Family
ID=44191908
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011022492A Withdrawn JP2011101048A (en) | 2011-02-04 | 2011-02-04 | Method of teaching handler, and handler |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011101048A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2518720A1 (en) | 2011-04-28 | 2012-10-31 | Yamaha Corporation | Woodwind instrument and airflow adjuster |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10199803A (en) * | 1997-01-14 | 1998-07-31 | Canon Inc | Positioning device |
| JP2002368491A (en) * | 2001-06-13 | 2002-12-20 | Sony Corp | Component height measuring method and apparatus in component mounting apparatus |
| JP2003133795A (en) * | 2001-10-29 | 2003-05-09 | Matsushita Electric Ind Co Ltd | Detecting method of upper-face height of board in electronic part mounting apparatus |
| JP2008124198A (en) * | 2006-11-10 | 2008-05-29 | Seiko Epson Corp | Handler teaching method and handler |
-
2011
- 2011-02-04 JP JP2011022492A patent/JP2011101048A/en not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10199803A (en) * | 1997-01-14 | 1998-07-31 | Canon Inc | Positioning device |
| JP2002368491A (en) * | 2001-06-13 | 2002-12-20 | Sony Corp | Component height measuring method and apparatus in component mounting apparatus |
| JP2003133795A (en) * | 2001-10-29 | 2003-05-09 | Matsushita Electric Ind Co Ltd | Detecting method of upper-face height of board in electronic part mounting apparatus |
| JP2008124198A (en) * | 2006-11-10 | 2008-05-29 | Seiko Epson Corp | Handler teaching method and handler |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2518720A1 (en) | 2011-04-28 | 2012-10-31 | Yamaha Corporation | Woodwind instrument and airflow adjuster |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008124198A (en) | Handler teaching method and handler | |
| JP5447565B2 (en) | Handler teaching method and handler | |
| JP4683129B2 (en) | Handler teaching method and handler | |
| JP6021550B2 (en) | Electronic component mounting equipment | |
| JP5187112B2 (en) | Electronic component inspection equipment | |
| KR101682036B1 (en) | Conveyance device, component mounting device, and gripper | |
| JP5359801B2 (en) | Electronic component inspection device and electronic component transfer device | |
| KR101266662B1 (en) | Semiconductor chip testing system | |
| TW200944797A (en) | Handler with function for correcting position and method for loading device to be inspected on measuring socket | |
| JP2010082782A (en) | Suction device and suction method | |
| JP5375528B2 (en) | Electronic component inspection equipment | |
| CN113539872A (en) | Semiconductor element translation type testing, coding and taping integrated machine | |
| JP4702262B2 (en) | Semiconductor chip detection method of handler and handler | |
| JP6103745B2 (en) | Thrust height measurement system | |
| JP5359809B2 (en) | Electronic component gripping device and electronic component inspection device | |
| JP5152379B2 (en) | Positioning device maintenance method and IC handler positioning device | |
| JP2011101048A (en) | Method of teaching handler, and handler | |
| JP5527463B2 (en) | Electronic component conveyor | |
| JP4826818B2 (en) | Positioning device maintenance method, positioning device and IC handler. | |
| TWI425183B (en) | Immediate inspection of electronic components transfer device | |
| TW201332051A (en) | Suction type testing device and testing equipment using the same | |
| KR20080033014A (en) | Device contacting apparatus of test handler | |
| JP5359808B2 (en) | Electronic component inspection device and electronic component transfer device | |
| US10500737B2 (en) | Pick-and-place device having force measurement capability | |
| TWI625294B (en) | Electronic component conveying device and electronic component inspection device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111227 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130917 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20131113 |