JP2010256724A - 観察装置 - Google Patents
観察装置 Download PDFInfo
- Publication number
- JP2010256724A JP2010256724A JP2009108300A JP2009108300A JP2010256724A JP 2010256724 A JP2010256724 A JP 2010256724A JP 2009108300 A JP2009108300 A JP 2009108300A JP 2009108300 A JP2009108300 A JP 2009108300A JP 2010256724 A JP2010256724 A JP 2010256724A
- Authority
- JP
- Japan
- Prior art keywords
- contrast
- unit
- camera
- observation
- microscope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Microscoopes, Condenser (AREA)
- Automatic Focus Adjustment (AREA)
Abstract
【解決手段】ステージ103上に載置した試料102に対して回動可能に設けられ、試料102を所望の角度方向から撮影可能なカメラ106と、カメラ106により得られる試料102の撮影画像のコントラストを演算する演算部108とを備えた観察装置において、演算部108は、カメラ106の撮影角度θに基づいた範囲に対してコントラストを演算するようにする。
【選択図】図1
Description
まず、本発明の実施の形態1について説明する。図1は、本発明の実施の形態1の観察装置の概略正面構成図である。
まず、制御部−顕微鏡部間の制御構成について説明する。図2は、本発明の実施の形態1の観察装置のブロック図である。
PC110にインストールされているアプリケーションソフトウェアからの指示は、制御部108のシリアルI/F206を経由してCPU201へと送信され、CPU201は命令に従い処理した後、正常終了、エラー情報等の信号をシリアルI/F206を経由してPC110に返信する。
顕微鏡カメラ106は、得られた光学像を画像信号としてPC110に送信し、PC110はアプリケーションソフトウェアからの指示であるシャッタスピード、ゲイン、ホワイトバランスなどのカメラ制御信号を顕微鏡カメラ106に送信する。
PC110は、アプリケーションソフトウェアのグラフィック情報をモニタ113に送信することで、モニタ113上にアプリケーションソフトウェアの画像を表示させる。
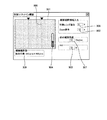
図3は、PC110にインストールされているアプリケーションソフトウェアのGUIのイメージ図であり、(a)は全体図、(b)は画像表示部の詳細図である。
観察者は、ズーム操作部302、AS操作部303、光源操作部305または焦準部操作部304を操作すると、該当する電動部115の駆動指示がPC110からシリアルI/F206を経由して制御部108に送信され、制御部108のCPU201は該当するI/F204(a)〜(d)に対してモータ駆動指示または光源設定指示を出し、該当指示の処理が完了すると、完了応答コマンドをシリアルI/F206を経由してPC110へ返信する。これにより、顕微鏡部104の電動部115は観察者の指定する位置に駆動する。
観察者は、斜め観察するときには、斜め観察スタンド107を所望の角度に傾けた後、GUI上の斜め観察角度入力部307に傾けた角度を入力する。
以下に、GUI上の斜め観察角度入力部307に角度を入力したときのアプリケーションソフトの処理を、図4のフローチャートを用いて説明する。
DOF=λ/(2×NA2)
ここに、DOF:焦点深度
λ:観察波長
NA:対物レンズの開口数
XFOVa=XFOV×1/cosθ
ここに、XFOVa:斜め観察時の視野
θ:傾き角度
XFOV:総合倍率から決まる視野の大きさ(CCDサイズ/(対物レンズ倍率×ズーム倍率))
XFOVin=DOF×1/tanθ
ここに、XFOVin:傾き角度θにおけるピントの合っている視野(図5中ハッチングで示す部分)のX方向の範囲(AF演算範囲)
AF演算範囲<斜め観察時の視野
結果が真であれば、GUI上にAF演算範囲表示310を表示させ(ステップS15)、このフローを抜ける。
結果が偽であれば、GUI上にAF演算範囲表示310を表示させず(ステップS16)、このフローを抜ける。
ここでは、AFの方法として、現在の位置から決められた焦準部の点数分の画像を取得し、最もコントラストの良い位置を合焦位置とする方法を使用する。
次に、本発明の実施の形態2について説明する。図7は、本発明の実施の形態2の観察装置の概略正面構成図である。
まず、PC−顕微鏡カメラ間の制御構成について説明する。図8は、本発明の実施の形態2の観察装置のブロック図である。
PC110は、アプリケーションソフトウェアのグラフィック情報をモニタ113に送信することで、モニタ113上にアプリケーションソフトウェアの画像を表示させる。
図9は、PC110にインストールされているアプリケーションソフトウェアのGUIのイメージ図である。
アプリケーションソフト起動時のアプリケーションソフトの処理を、図10のフローチャートを用いて説明する。
DOF=λ/(2×NA2)
ここに、DOF:焦点深度
λ:観察波長
NA:対物レンズの開口数
XFOVa=XFOV×1/cosθ
ここに、XFOVa:斜め観察時の視野
θ:傾き角度
XFOV:総合倍率から決まる視野の大きさ(CCDサイズ/(対物レンズ倍率×ズーム倍率))
XFOVin=DOF×1/tanθ
ここに、XFOVin:傾き角度θにおけるピントの合っている視野(図5中ハッチングで示す部分)のX方向の範囲(コントラスト演算範囲)
コントラスト演算範囲<斜め観察時の視野
結果が真であれば、GUI上にコントラスト演算範囲表示905を表示させ(ステップS35)、結果が偽であれば、GUI上にコントラスト演算範囲表示905を表示しない(ステップS36)。
次に、本発明の観察装置の変形例について説明する。
上記の実施の形態1および2のGUIにおいては、斜め観察角度入力部307のテキストボックスに傾き角度θを数値で入力するようにしているが、このようにする代わりに、例えば、図11に示すようなラジオボタン1101やチェックボックス等を用いて選択するようにしても良い。この場合、演算に用いる角度としては、ラジオボタンに予め表示してある角度を用いることができる。また、傾き角度θに限らず、倍率等の他の数値についてもラジオボタンやチェックボックスで選択可能なようにしてよい。
102 試料
103 ステージ
104 顕微鏡部
105 対物レンズ
106 顕微鏡カメラ(カメラ)
107 観察スタンド(スタンド)
108 制御部(演算部)
109 顕微鏡ケーブル
110 PC(操作部)
111 PCケーブル
112 カメラケーブル
113 モニタ
114 モニタケーブル
115 電動部
115(a) 電動焦準部
115(b) 電動AS
115(c) 電動ズーム部
201 CPU
202 RAM
203 ROM
204(a) 焦準部I/F
204(b) AS−I/F
204(c) ズームI/F
204(d) 光源I/F
205 バス
206 シリアルI/F
207(a),207(b),207(c) モータ
208(a),208(b),208(c) センサ
209 光源
301 画像表示部
302 ズーム操作部
303 AS操作部
304 焦準部操作部
305 光源操作部
306 AF実行部
307 斜め観察角度入力部
308 対物レンズ倍率入力部
309 顕微鏡状態表示部
310 AF演算範囲表示
701 ピント操作ハンドル
702 ズーム操作ハンドル
703 AS操作ハンドル
704 顕微鏡部
705(a) ピント調節機構
705(b) AS駆動機構
705(c) ズーム調節機構
902 ズーム入力部
903 AS入力部
904 コントラスト表示部
905 コントラスト演算範囲表示
θ 傾き角度(撮影角度)
Claims (5)
- ステージ上に載置した試料に対して回動可能に設けられ、前記試料を所望の角度方向から撮影可能なカメラと、
前記カメラにより得られる前記試料の撮影画像のコントラストを演算する演算部とを備えた観察装置において、
前記演算部は、前記カメラの撮影角度に基づいた範囲に対してコントラストを演算することを特徴とする観察装置。 - 前記試料を中心として傾動可能に設けられ、前記カメラを保持するスタンドと、
前記スタンドの傾動情報を取得する制御部と、
観察者が操作するための操作部と、
をさらに備え、前記演算部は、オートフォーカス動作のためのコントラストを演算する場合に、前記操作部に対するオートフォーカス動作の開始に応じてコントラストの演算を開始し、その後、予め定めたオートフォーカス動作の終了を最初に検知したときにコントラストの演算を終了することを特徴とする請求項1に記載の観察装置。 - 前記演算部は、前記操作部に入力された前記カメラの撮影角度をコントラストの演算に用いることを特徴とする請求項2に記載の観察装置。
- 前記カメラの撮影角度を検知する検知部をさらに備え、前記演算部は、前記検知部により検知した角度をコントラストの演算に用いることを特徴とする請求項2に記載の観察装置。
- コントラストを演算するコントラスト演算範囲をXFOVin、前記カメラの撮影角度をθ、観察条件の焦点深度をDOFとすると、前記演算部は、
XFOVin≦DOF×1/tanθの関係式を満たす前記コントラスト演算範囲に対してコントラストを演算することを特徴とする請求項1〜4のいずれか一つに記載の観察装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009108300A JP2010256724A (ja) | 2009-04-27 | 2009-04-27 | 観察装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009108300A JP2010256724A (ja) | 2009-04-27 | 2009-04-27 | 観察装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010256724A true JP2010256724A (ja) | 2010-11-11 |
| JP2010256724A5 JP2010256724A5 (ja) | 2012-05-10 |
Family
ID=43317685
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009108300A Pending JP2010256724A (ja) | 2009-04-27 | 2009-04-27 | 観察装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010256724A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014106350A (ja) * | 2012-11-27 | 2014-06-09 | Olympus Corp | 顕微鏡システム、合焦方法および制御方法 |
| JP2015102694A (ja) * | 2013-11-25 | 2015-06-04 | オリンパス株式会社 | アライメント装置、顕微鏡システム、アライメント方法、及びアライメントプログラム |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10170817A (ja) * | 1996-12-12 | 1998-06-26 | Toshiba Corp | 合焦位置算出装置及びその方法とそれらを使用した電子顕微鏡 |
| JPH10239583A (ja) * | 1997-02-26 | 1998-09-11 | Olympus Optical Co Ltd | 顕微鏡用自動焦点検出装置 |
| JP2001059599A (ja) * | 1999-06-15 | 2001-03-06 | Keyence Corp | 拡大観察用のスタンド装置 |
| JP2002228938A (ja) * | 2000-09-28 | 2002-08-14 | Leica Microsystems Ag | 架 台 |
| JP2002228421A (ja) * | 2001-02-02 | 2002-08-14 | Olympus Optical Co Ltd | 走査型レーザ顕微鏡 |
| JP2002365524A (ja) * | 2001-06-11 | 2002-12-18 | Nippon Hoso Kyokai <Nhk> | オートフォーカス装置及びそれを用いた撮像装置 |
| JP2005114859A (ja) * | 2003-10-03 | 2005-04-28 | Nikon Corp | 顕微鏡 |
| JP2006300553A (ja) * | 2005-04-15 | 2006-11-02 | Nikon Corp | 検査装置 |
| JP2009031323A (ja) * | 2007-07-24 | 2009-02-12 | Nikon Corp | 顕微鏡の接眼鏡筒および顕微鏡システム |
-
2009
- 2009-04-27 JP JP2009108300A patent/JP2010256724A/ja active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10170817A (ja) * | 1996-12-12 | 1998-06-26 | Toshiba Corp | 合焦位置算出装置及びその方法とそれらを使用した電子顕微鏡 |
| JPH10239583A (ja) * | 1997-02-26 | 1998-09-11 | Olympus Optical Co Ltd | 顕微鏡用自動焦点検出装置 |
| JP2001059599A (ja) * | 1999-06-15 | 2001-03-06 | Keyence Corp | 拡大観察用のスタンド装置 |
| JP2002228938A (ja) * | 2000-09-28 | 2002-08-14 | Leica Microsystems Ag | 架 台 |
| JP2002228421A (ja) * | 2001-02-02 | 2002-08-14 | Olympus Optical Co Ltd | 走査型レーザ顕微鏡 |
| JP2002365524A (ja) * | 2001-06-11 | 2002-12-18 | Nippon Hoso Kyokai <Nhk> | オートフォーカス装置及びそれを用いた撮像装置 |
| JP2005114859A (ja) * | 2003-10-03 | 2005-04-28 | Nikon Corp | 顕微鏡 |
| JP2006300553A (ja) * | 2005-04-15 | 2006-11-02 | Nikon Corp | 検査装置 |
| JP2009031323A (ja) * | 2007-07-24 | 2009-02-12 | Nikon Corp | 顕微鏡の接眼鏡筒および顕微鏡システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014106350A (ja) * | 2012-11-27 | 2014-06-09 | Olympus Corp | 顕微鏡システム、合焦方法および制御方法 |
| JP2015102694A (ja) * | 2013-11-25 | 2015-06-04 | オリンパス株式会社 | アライメント装置、顕微鏡システム、アライメント方法、及びアライメントプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9007452B2 (en) | Magnification observation device, magnification observation method, and magnification observation program | |
| US9151942B2 (en) | Microscope system | |
| JP5589619B2 (ja) | 情報処理装置、ステージうねり補正方法、プログラム | |
| JP4770493B2 (ja) | 遠隔指示システム及び遠隔指示方法 | |
| JP2007102190A (ja) | 観察装置および観察方法 | |
| US10095003B2 (en) | Autofocus apparatus, autofocus method, and program | |
| US11112952B2 (en) | Interface for display of multi-layer images in digital microscopy | |
| JP4878815B2 (ja) | 顕微鏡装置 | |
| JP2010112969A (ja) | 共焦点顕微鏡 | |
| JP2010169968A (ja) | 顕微鏡システム及び該制御方法 | |
| JP5192965B2 (ja) | 顕微鏡システム、該制御プログラム、及び該制御方法 | |
| JP2007034050A (ja) | 観察装置及びその制御方法 | |
| JP2010054704A (ja) | 観察装置及びその制御装置並びにプログラム | |
| JP2010256724A (ja) | 観察装置 | |
| JP2010078940A (ja) | 顕微鏡システム、顕微鏡システムにおけるフォーカスドリフトの補正方法及びプログラム。 | |
| JP2015102694A (ja) | アライメント装置、顕微鏡システム、アライメント方法、及びアライメントプログラム | |
| JP5730696B2 (ja) | 画像処理装置および画像表示システム | |
| JP4979464B2 (ja) | 顕微鏡装置、該制御プログラム、及び該制御方法 | |
| JP4644595B2 (ja) | ディスプレイの評価装置、評価方法及びプログラム | |
| JP5904737B2 (ja) | 顕微鏡システム | |
| JP2009015301A (ja) | 顕微鏡システム | |
| JP2007316993A (ja) | 画像処理装置、画像データを選択させる方法、およびその方法をコンピュータに実行させるためのプログラム | |
| JP2018116197A (ja) | 顕微鏡システム、貼り合わせ画像生成プログラム、及び貼り合わせ画像生成方法 | |
| JP2010085699A (ja) | オートフォーカスシステム | |
| JP5980719B2 (ja) | 走査型プローブ顕微鏡装置の調整方法、及び、走査型プローブ顕微鏡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120315 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120315 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121211 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130827 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131217 |