JP2010200856A - 顎運動測定システム - Google Patents
顎運動測定システム Download PDFInfo
- Publication number
- JP2010200856A JP2010200856A JP2009047257A JP2009047257A JP2010200856A JP 2010200856 A JP2010200856 A JP 2010200856A JP 2009047257 A JP2009047257 A JP 2009047257A JP 2009047257 A JP2009047257 A JP 2009047257A JP 2010200856 A JP2010200856 A JP 2010200856A
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- acceleration sensor
- axis direction
- jaw movement
- jaw
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6813—Specially adapted to be attached to a specific body part
- A61B5/6814—Head
- A61B5/682—Mouth, e.g., oral cavity; tongue; Lips; Teeth
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4538—Evaluating a particular part of the muscoloskeletal system or a particular medical condition
- A61B5/4542—Evaluating the mouth, e.g. the jaw
- A61B5/4557—Evaluating bruxism
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4528—Joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6813—Specially adapted to be attached to a specific body part
- A61B5/6814—Head
Abstract
【解決手段】3軸方向の加速度を検知する加速度センサ12、一端が前記加速度センサ12に接続されたフレキシブル配線14、前記フレキシブル配線14の他端に接続され且つ前記3軸方向の加速度データを出力する出力端子、及び前記加速度センサ12を下顎のオトガイ部18に装着する装着部を、少なくとも備えた加速度検出器10と、前記加速度検出器10から顎運動に応じた加速度データを取得し、取得された加速度データに対し前記加速度センサ12に起因する誤差を補正して、加速度波形で表される顎運動を測定する顎運動測定装置30と、を備えた顎運動測定システム。
【選択図】図1
Description
(全体的な装置構成)
図1は本発明の実施の形態に係る顎運動測定システムの構成を表す概略図である。図1に示すように、顎運動測定システムは、加速度検出器10と、加速度検出器10の出力をアナログ/デジタル変換するインターフェース装置20と、インターフェース装置20を介して加速度検出器10と接続される顎運動測定装置30と、を含んで構成されている。加速度検出器10は、3軸方向の加速度を検知する加速度センサ12、一端が加速度センサ12に接続されたフレキシブル配線14、及びフレキシブル配線14の他端に接続されたコネクタ16を備えている。コネクタ16は、インターフェース装置20に接続される。加速度センサ12は、後述する装着部材を用いて下顎のオトガイ部18に装着される。
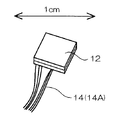
図2は加速度センサの周辺部の構成を表す概略図である。図2に示すように、加速度センサ12としては、5mm×5mm程度の大きさの小型且つ軽量な3軸加速度センサが好適に用いられる。小型且つ軽量な加速度センサ12は、下顎のオトガイ部18の皮膚を下垂させないので、加速度センサ12の振動によるノイズの発生を抑制する。本実施の形態では、市販されている加速度センサ(浅草技研社製の3軸加速度センサ「AS-3ACC」)のセンサボードから取り外したチップを、加速度センサ12として使用している。
図3は顎運動測定装置の構成を示すブロック図である。顎運動測定装置30は、例えば、顎運動測定プログラムがインストールされたコンピュータ及びその周辺機器により構成されている。顎運動測定装置30は、図3に示すように、装置全体の制御及び各種演算を行うCPU(中央処理装置; Central Processing Unit)32、OS(Operating Systems)等の各種プログラムを記憶したROM(Read Only Memory)34、プログラムの実行時にワークエリアとして使用されるRAM(Random Access Memory)36、各種情報を記憶するハードディスク(HD)38、入出力(I/O)ポート40、通信インターフェース(I/F)42、及び各種ドライブ44を備えている。これら各部は、バス46により相互に接続されている。
(オトガイ部への装着方法)
次に、加速度検出器の装着方法について説明する。図4(A)は装着部材の構造を示す積層断面図である。図4(B)は装着部材により加速度センサがオトガイ部18に装着された様子を示す模式図である。ここではフレキシブル配線14等の図示を省略する。図4(A)に示すように、加速度検出器10は、加速度センサ12を下顎のオトガイ部18に装着するための装着部材13を備えている。
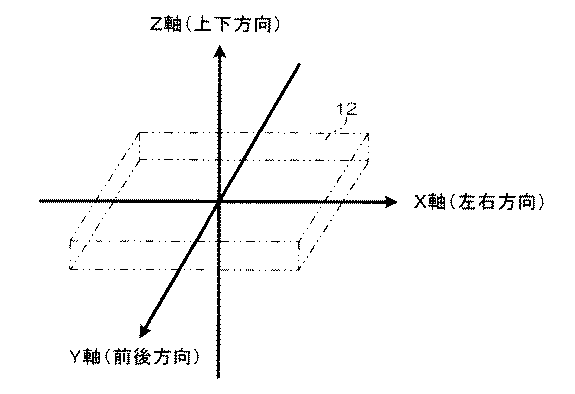
図5は加速度センサの直交座標系と顎運動の方向との関係を示す図である。加速度センサ12は、直交座標系のX軸、Y軸、Z軸の3軸方向の加速度を検知する3軸加速度センサである。人体の一部を構成する下顎のオトガイ部18には、左右方向、前後方向、及び上下方向の区別がある。加速度センサ12は、X軸方向が左右方向に対応し、Y軸方向が前後方向に対応し、且つZ軸方向が上下方向に対応するように、下顎のオトガイ部18に装着される。図面を参照して後述する通り、より詳細には、Y軸方向が下顎頭の回転軸周りの回転運動の接線方向(前後方向)に対応し、Z軸方向が上記回転軸と加速度センサ12とを結ぶ直線の延在方向(上下方向)に対応する(図12参照)。
(Z軸周りの回転 -第1の補正-)
加速度検出器10、インターフェース装置20、及び顎運動測定装置30を含む顎運動測定システムのセッティングが完了し、加速度検出器10の装着部材13により加速度センサ12の被験者へのオトガイ部18への装着が完了すると、顎運動測定装置30への加速度データの入力を開始する。また、顎運動測定装置30は、ROM34に記憶された「顎運動測定プログラム」を起動する。図16は、顎運動測定プログラムの処理ルーチンを表すフローチャートである。
操作者は、補正後のデータ画面62Aが表示された加速度データ表示部62を見て、Z軸方向の加速度データを確認する。Z軸方向の加速度データの振幅が大きいと判断した場合には、「次へ」ボタン72を操作して次の軸を選択する。Z軸方向の加速度データの振幅が適正な場合には、終了ボタン70を操作して、位置ずれ補正を終了する。
顎運動測定装置30は、ステップ114で、終了指示の選択が確認されると、ステップ116に進み、図13に示す基線設定画面84を、顎運動測定装置30の表示装置50に表示する。基線設定画面84には、Y軸方向の加速度データを表示する加速度データ表示部86、及びY軸方向の加速度データを積分して得られた速度データを表示する速度データ表示部88が表示されている。
12 加速度センサ
13 装着部材
14 フレキシブル配線
14A 細線
16 コネクタ
18 オトガイ部
20 インターフェース装置
22 緩衝部材
24 接着部材
30 顎運動測定装置
50 表示装置
60 補正角度設定画面
62A データ画面
62B データ画面
62 加速度データ表示部
64 軸選択部
66 角度設定部
80 下顎窩
82 下顎頭
84 基線設定画面
86 加速度データ表示部
88 速度データ表示部
90 基線設定ライン
Claims (8)
- 3軸方向の加速度を検知する加速度センサ、一端が前記加速度センサに接続されたフレキシブル配線、前記フレキシブル配線の他端に接続され且つ前記3軸方向の加速度データを出力する出力端子、及び前記加速度センサを下顎のオトガイ部に装着する装着部を、少なくとも備えた加速度検出器と、
前記加速度検出器から顎運動に応じた加速度データを取得し、取得された加速度データに対し前記加速度センサに起因する誤差を補正して、加速度波形で表される顎運動を測定する顎運動測定装置と、
を備えた顎運動測定システム。 - 前記加速度センサは、X軸方向が左右方向に対応し、Y軸方向が前後方向に対応し、且つZ軸方向が上下方向に対応するように、下顎のオトガイ部に装着され、
前記顎運動測定装置は、X軸方向の加速度データが最小になるように、前記加速度センサの直交座標をZ軸周りに回転させる第1の補正と、Z軸方向の加速度データが最小になるように、前記加速度センサの直交座標をX軸周りに回転させる第2の補正とを行い、取得された加速度データに対し前記加速度センサの装着位置ずれに起因する誤差を補正する位置ずれ補正手段を備えた、
請求項1に記載の顎運動測定システム。 - 前記顎運動測定装置は、表示手段及び前記表示手段を制御する表示制御手段を更に備え、前記表示制御手段は、前記加速度検出器から取得された加速度データ、前記加速度センサの3軸の何れかを選択する軸選択部、及び選択された軸周りの回転角度を設定する角度設定部を、前記表示装置に表示し、
前記位置ずれ補正手段は、前記軸選択部により選択されたZ軸周りに、前記角度設定部により設定された角度だけ加速度センサの直交座標を回転させて、X軸方向の加速度データを最小にする第1の補正を行い、前記軸選択部により選択されたX軸周りに、前記角度設定部により設定された角度だけ加速度センサの直交座標を回転させて、Z軸方向の加速度データを最小にする第2の補正を行う、
請求項2に記載の顎運動測定システム。 - 前記顎運動測定装置は、Y軸方向の電圧信号を積分して得られた速度波形が一定の振幅範囲で変動するように、前記加速度検出器から取得された加速度データに対し基線を設定して加速度波形のゼロ点を定める基線設定手段を更に備えた、
請求項1から請求項3までの何れか1項に記載の顎運動測定システム。 - 前記顎運動測定装置は、
前記表示制御手段が、前記加速度検出器から取得されたY軸方向の加速度データ、及び取得された加速度データに対し基線を設定する基線設定部を、前記表示装置に表示する第1の工程と、前記基線設定手段が、前記基線設定部により設定された基線に基づいてY軸方向の加速度データを積分する第2の工程と、前記表示制御手段が、Y軸方向の加速度データを積分して得られた速度波形を前記表示装置に表示する第3の工程と、を基線が確定されるまで繰り返し行って、
前記加速度データに対し基線を設定して加速度波形のゼロ点を定める、
請求項4に記載の顎運動測定システム。 - 前記加速度センサは、下顎のオトガイ部の皮膚を下垂させない程度に、小型化且つ軽量化された請求項1から請求項5までの何れか1項に記載の顎運動測定システム。
- 前記フレキシブル配線は、前記加速度センサにより検知される加速度を変動させない程度に、可とう性が付与され且つ軽量化された請求項1から請求項6までの何れか1項に記載の顎運動測定システム。
- 前記装着部は、前記加速度センサを保持すると共に皮膚の振動を吸収する緩衝部材と、前記緩衝部材を介して前記加速度センサを下顎のオトガイ部に接着する接着部材と、を備えた請求項1から請求項7までの何れか1項に記載の顎運動測定システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009047257A JP5350016B2 (ja) | 2009-02-27 | 2009-02-27 | 顎運動測定システム |
| PCT/JP2010/052974 WO2010098388A1 (ja) | 2009-02-27 | 2010-02-25 | 顎運動測定システム |
| US13/203,272 US8544322B2 (en) | 2009-02-27 | 2010-02-25 | Jaw motion measuring system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009047257A JP5350016B2 (ja) | 2009-02-27 | 2009-02-27 | 顎運動測定システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010200856A true JP2010200856A (ja) | 2010-09-16 |
| JP2010200856A5 JP2010200856A5 (ja) | 2012-01-26 |
| JP5350016B2 JP5350016B2 (ja) | 2013-11-27 |
Family
ID=42665592
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009047257A Expired - Fee Related JP5350016B2 (ja) | 2009-02-27 | 2009-02-27 | 顎運動測定システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8544322B2 (ja) |
| JP (1) | JP5350016B2 (ja) |
| WO (1) | WO2010098388A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017104465A (ja) * | 2014-12-27 | 2017-06-15 | 三栄源エフ・エフ・アイ株式会社 | 飲食物の嚥下感覚の評価方法 |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014146016A2 (en) | 2013-03-15 | 2014-09-18 | Alfred E. Mann Foundation For Scientific Research | Current sensing multiple output current stimulators with fast turn on time |
| JP6781865B2 (ja) | 2013-07-29 | 2020-11-11 | アルフレッド イー. マン ファウンデーション フォー サイエンティフィック リサーチ | マイクロプロセッサ制御されたeクラスドライバ |
| JP6795491B2 (ja) | 2014-08-15 | 2020-12-02 | アクソニクス モジュレーション テクノロジーズ インコーポレイテッド | 膀胱機能不全およびその他の症状を緩和するための神経刺激のための埋込可能導線添着構造 |
| EP3180075A4 (en) | 2014-08-15 | 2018-03-07 | Axonics Modulation Technologies Inc. | Integrated electromyographic clinician programmer for use with an implantable neurostimulator |
| US9555246B2 (en) | 2014-08-15 | 2017-01-31 | Axonics Modulation Technologies, Inc. | Electromyographic lead positioning and stimulation titration in a nerve stimulation system for treatment of overactive bladder |
| CA2957967C (en) | 2014-08-15 | 2018-11-27 | Axonics Modulation Technologies, Inc. | Systems and methods for neurostimulation electrode configurations based on neural localization |
| AU2015301489B2 (en) | 2014-08-15 | 2020-01-23 | Axonics Modulation Technologies, Inc. | External pulse generator device and associated methods for trial nerve stimulation |
| AU2015318076B2 (en) * | 2014-09-15 | 2018-08-30 | Attenti Electronic Monitoring Ltd. | Impairment detection |
| AU2016205049B2 (en) | 2015-01-09 | 2020-05-14 | Axonics Modulation Technologies, Inc. | Improved antenna and methods of use for an implantable nerve stimulator |
| ES2725489T3 (es) | 2015-01-09 | 2019-09-24 | Axonics Modulation Tech Inc | Control remoto del paciente y procedimientos de uso asociados con un sistema de estimulación nerviosa |
| AU2016205050B2 (en) | 2015-01-09 | 2020-02-27 | Axonics Modulation Technologies, Inc. | Attachment devices and associated methods of use with a nerve stimulation charging device |
| WO2017011305A1 (en) | 2015-07-10 | 2017-01-19 | Axonics Modulation Technologies, Inc. | Implantable nerve stimulator having internal electronics without asic and methods of use |
| EP3407965B1 (en) | 2016-01-29 | 2021-03-03 | Axonics Modulation Technologies, Inc. | Systems for frequency adjustment to optimize charging of implantable neurostimulator |
| AU2017218157B2 (en) | 2016-02-12 | 2022-09-29 | Axonics, Inc. | External pulse generator device and associated methods for trial nerve stimulation |
| US20170265801A1 (en) * | 2016-03-15 | 2017-09-21 | Aalok Nital Patwa | Bruxism Detection System With Chin-Mounted Accelerometer Sensor |
| JP2021513902A (ja) | 2018-02-22 | 2021-06-03 | アクソニクス モジュレーション テクノロジーズ インコーポレイテッド | 試験的神経刺激のための神経刺激リードおよび使用方法 |
| WO2020185902A1 (en) | 2019-03-11 | 2020-09-17 | Axonics Modulation Technologies, Inc. | Charging device with off-center coil |
| US11848090B2 (en) | 2019-05-24 | 2023-12-19 | Axonics, Inc. | Trainer for a neurostimulator programmer and associated methods of use with a neurostimulation system |
| US11439829B2 (en) | 2019-05-24 | 2022-09-13 | Axonics, Inc. | Clinician programmer methods and systems for maintaining target operating temperatures |
| TWI702941B (zh) * | 2019-11-28 | 2020-09-01 | 長庚醫療財團法人林口長庚紀念醫院 | 下頜張合力量與施力穩定狀態檢測裝置 |
| CN114287361B (zh) * | 2022-01-20 | 2022-12-23 | 中国农业科学院农业信息研究所 | 一种牲畜行为监测分析系统及方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6361121A (ja) * | 1986-09-01 | 1988-03-17 | Canon Inc | 振動検出装置用出力補正装置 |
| JPH10124245A (ja) * | 1996-10-18 | 1998-05-15 | Ricoh Co Ltd | ペン型入力装置 |
| JP2008307207A (ja) * | 2007-06-14 | 2008-12-25 | Advanced Telecommunication Research Institute International | 動作計測装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10124254A (ja) | 1996-10-21 | 1998-05-15 | Nisshin Koki Kk | 光学式マウスシステム |
| JP5077522B2 (ja) | 2006-07-12 | 2012-11-21 | 株式会社東京技研 | 摂食機能測定装置 |
| JP5082127B2 (ja) | 2006-07-13 | 2012-11-28 | 株式会社東京技研 | 口腔運動測定装置 |
-
2009
- 2009-02-27 JP JP2009047257A patent/JP5350016B2/ja not_active Expired - Fee Related
-
2010
- 2010-02-25 US US13/203,272 patent/US8544322B2/en not_active Expired - Fee Related
- 2010-02-25 WO PCT/JP2010/052974 patent/WO2010098388A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6361121A (ja) * | 1986-09-01 | 1988-03-17 | Canon Inc | 振動検出装置用出力補正装置 |
| JPH10124245A (ja) * | 1996-10-18 | 1998-05-15 | Ricoh Co Ltd | ペン型入力装置 |
| JP2008307207A (ja) * | 2007-06-14 | 2008-12-25 | Advanced Telecommunication Research Institute International | 動作計測装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017104465A (ja) * | 2014-12-27 | 2017-06-15 | 三栄源エフ・エフ・アイ株式会社 | 飲食物の嚥下感覚の評価方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010098388A1 (ja) | 2010-09-02 |
| JP5350016B2 (ja) | 2013-11-27 |
| US20120048013A1 (en) | 2012-03-01 |
| US8544322B2 (en) | 2013-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5350016B2 (ja) | 顎運動測定システム | |
| JP6112300B2 (ja) | マスタースレーブロボットの制御装置及び制御方法、マスタースレーブロボット、並びに、制御プログラム | |
| JP4899064B2 (ja) | 歯の咬み合わせ修正支援装置、プログラム、及び記録媒体 | |
| EP2363066A1 (en) | Dental diagnosis system and dental care system | |
| EP0455700A1 (en) | Method and apparatus for generating cephalometric images | |
| JP2010200856A5 (ja) | ||
| JP2018196580A (ja) | 歯列矯正支援方法および歯列矯正支援システム | |
| Mostashiri et al. | A novel spatial mandibular motion-capture system based on planar fiducial markers | |
| JP5891080B2 (ja) | 顎運動シミュレーション方法、顎運動シミュレーション装置、及び顎運動シミュレーションシステム | |
| CN112790888A (zh) | 下颌运动捕捉系统、捕捉方法以及模拟方法 | |
| JP5273432B2 (ja) | コントローラ | |
| CN108066034B (zh) | 牙齿受力测量装置及方法 | |
| JP3855038B2 (ja) | 剛体運動測定方法、剛体運動測定装置、剛体運動測定プログラム、顎運動測定方法、顎運動測定装置および顎運動測定プログラム | |
| WO2022176943A1 (ja) | 口腔内カメラシステム及び画像表示方法 | |
| TWI616193B (zh) | 口腔咬合路徑量測裝置、用於感測一口腔咬合運動的方法、以及用於感測一口腔運動的裝置 | |
| JP5363181B2 (ja) | 歯牙模型、歯列模型、顎模型、頭部模型、医療用実習装置 | |
| US20110191083A1 (en) | System and Method for Measuring and Reporting the Relative Functions of Dental Anatomical Structures | |
| Farook et al. | A 3D printed electronic wearable device to generate vertical, horizontal and phono-articulatory jaw movement parameters: A concept implementation | |
| CN214511395U (zh) | 下颌运动捕捉系统 | |
| JP2022041340A (ja) | 歯科用下顎運動測定器用生体標点測定指示具 | |
| Hayashi et al. | Comparison of the finite helical axis and the rectangular coordinate system in representing orthodontic tooth movement | |
| JPWO2019053949A1 (ja) | 咬合圧解析装置、咬合圧解析プログラム、及び咬合圧解析方法 | |
| JP7224634B2 (ja) | スキャナ保持装置 | |
| WO2022176941A1 (ja) | 口腔内カメラシステム及び歯牙識別方法 | |
| US10657726B1 (en) | Mixed reality system and method for determining spatial coordinates of dental instruments |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111205 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130821 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5350016 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |