JP2010143577A - 運転支援装置 - Google Patents
運転支援装置 Download PDFInfo
- Publication number
- JP2010143577A JP2010143577A JP2009296401A JP2009296401A JP2010143577A JP 2010143577 A JP2010143577 A JP 2010143577A JP 2009296401 A JP2009296401 A JP 2009296401A JP 2009296401 A JP2009296401 A JP 2009296401A JP 2010143577 A JP2010143577 A JP 2010143577A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- display
- parking
- driving
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000000007 visual effect Effects 0.000 abstract description 16
- 238000001514 detection method Methods 0.000 description 44
- 230000002441 reversible effect Effects 0.000 description 35
- 230000005540 biological transmission Effects 0.000 description 21
- 238000012790 confirmation Methods 0.000 description 18
- 238000003384 imaging method Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 12
- 238000012544 monitoring process Methods 0.000 description 11
- 230000006870 function Effects 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 238000006073 displacement reaction Methods 0.000 description 5
- 238000005286 illumination Methods 0.000 description 5
- 238000012545 processing Methods 0.000 description 4
- 239000003086 colorant Substances 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 239000000872 buffer Substances 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 230000011218 segmentation Effects 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 208000019901 Anxiety disease Diseases 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 238000003833 Wallach reaction Methods 0.000 description 1
- 230000036506 anxiety Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000011179 visual inspection Methods 0.000 description 1
Images









Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/80—Technologies aiming to reduce greenhouse gasses emissions common to all road transportation technologies
- Y02T10/84—Data processing systems or methods, management, administration
Landscapes
- Closed-Circuit Television Systems (AREA)
Abstract
【課題】簡単な構成の映像によって、運転支援を可能にする。
【解決手段】 切換スイッチ60を設けて、情報ディスプレイ4で縦列駐車支援61または通常駐車支援62を行う縦列駐車モードまたは通常駐車モードを切換可能にしている。通常駐車モードでは、カメラユニット50の視野50aやバックライト52の照射は車両1の後方を重点に行われる。縦列駐車モードでは、カメラユニット50の視野50aやバックライト52の照射を車両の側方に対しても行う。
【選択図】 図10
【解決手段】 切換スイッチ60を設けて、情報ディスプレイ4で縦列駐車支援61または通常駐車支援62を行う縦列駐車モードまたは通常駐車モードを切換可能にしている。通常駐車モードでは、カメラユニット50の視野50aやバックライト52の照射は車両1の後方を重点に行われる。縦列駐車モードでは、カメラユニット50の視野50aやバックライト52の照射を車両の側方に対しても行う。
【選択図】 図10
Description
本発明は、車両の外部を撮像する映像に基づいて車両の運転者を支援する運転支援装置に関する。
自動車などの車両を安全に運転するためには、車両の外部の交通状況などを充分に把握する必要がある。車両の運転者は、運転しながら絶えず周囲の状況の把握に努めているけれども、人間の感覚には限界がある。特に視覚は重要であるけれども、人間の視覚は顔が向いている方向に限られる。特に車両の運転者は、車体の陰になって見ることができない死角が生じるのを避けられない条件下で、車両の運転を行わなければならない。
車両の運転に関して、運転者から死角となる主要な部分は、車輪近傍と車体の直前および直後の部分である。車輪近傍のうち、特にステアリングの操作に応じて走行方向を変える車輪自体の向きを確認することはできない。ステアリングホイールは、一方向に複数回回転させることができるので、ステアリングホイールが見掛け上、中立の位置であっても、直進状態となっているか否かは判らない。また、後方の視界が限られているので、後進運転で狭いスペースに駐車する際、運転者は非常に神経を使う。
車両の後退時に後方または側後方視界の画像と予想軌跡とを画面に表示する先行技術は、たとえば特開平1−14700号公報に開示されている。この先行技術では、後方を撮像した映像に、車両のステアリングの切り角に従って予想される予想軌跡の画像を表示するので、ステアリングの切り角の確認と後方の安全の確認とを合わせて行うことができる。特開平7−44799号公報には、各種のセンサを用いて、駐車スペースの長さを検出し、駐車のための運転を支援する先行技術が開示されている。
車両の周囲の映像を撮像して車両の運転の支援を行う先行技術は、たとえば特許文献1〜7などに開示されている。特許文献1には、カメラで撮像する画像から、障害物との接触可能性を検出して表示する先行技術が開示されている。特許文献2には、車両の後方画像と、左側方画像および右側方画像とをシームレスで合成して表示する先行技術が開示されている。特許文献3には、カメラで撮像した画像を距離目盛とともに表示して、運転の支援を行う先行技術が開示されている。特許文献4には、車両の天井に回転雲台を介して水平に360°回転可能なカメラを取付け、車両の周囲の所望の方向を撮像し、撮像した映像を運転者が見やすいように変換合成表示し、運転の支援を行う先行技術が開示されている。特許文献5には、車両の左前方、前方および右前方の映像を3つのカメラでそれぞれ撮像し、ステアリングの方向に応じて3つのカメラからの映像を表示する画面分割面積を変えて運転支援を行う先行技術が開示されている。特許文献6には、車両が狭路を通過する際に、前方を撮像する映像から障害物を検出し、障害物の隙間を検出することによって運転支援を行う先行技術が開示されている。特許文献7には、映像表示器での表示内容を、異常事態発生時に通常表示から異常表示に切換えて、運転支援を行う先行技術が開示されている。
特開平7−44799号公報の先行技術のように、距離の検出によって駐車スペースの長さを推定し、車庫入れや縦列駐車の運転の支援を行うとしても、運転者の死角となっている映像を表示する運転支援は行われないので、運転者の不安を完全に払拭することはできない。カメラで映像を撮像して支援を行う先行技術では、運転者の死角を映像で補うので、運転者は映像を見て車両の周囲の状況を確認することができ、運転者に安心感を与える運転支援を行うことができる。しかしながら、各先行技術による運転支援は、必ずしも簡単な構成で適切な情報を与えてくれるものではない。
本発明の目的は、簡単な構成の映像による運転支援を行うことができる運転支援装置を提供することである。
本発明(1)は、車両に設置されたカメラで撮影された映像を表示手段に表示する運転支援装置であって、
車両側方の映像を含む運転支援映像を前記表示手段に表示する縦列駐車モードと車両後方の映像を含む運転支援映像を前記表示手段に表示する通常駐車モードとを選択するモード選択手段と、
前記モード選択手段により縦列駐車モードが選択された場合、前記他の駐車モードとは異なるライン照射で前記カメラによる撮影を制御する制御手段とを有することを特徴とする運転支援装置である。
車両側方の映像を含む運転支援映像を前記表示手段に表示する縦列駐車モードと車両後方の映像を含む運転支援映像を前記表示手段に表示する通常駐車モードとを選択するモード選択手段と、
前記モード選択手段により縦列駐車モードが選択された場合、前記他の駐車モードとは異なるライン照射で前記カメラによる撮影を制御する制御手段とを有することを特徴とする運転支援装置である。
また本発明(2)は、前記制御手段は、前記モード選択手段により縦列駐車モードが選択された場合、前記車両側方に対するライト照射で前記カメラによる撮影を制御することを特徴とする。
また本発明(3)は、車両に設置されたカメラで撮影された映像を表示手段に表示する運転支援装置であって、
車両側方の映像を含む運転支援映像を前記表示手段に表示する縦列駐車モードと車両後方の映像を含む運転支援映像を前記表示手段に表示する通常駐車モードとを選択するモード選択手段と、
前記モード選択手段は、地図データにおける駐車場データに基づいて前記駐車モードのいずれかを選択する制御手段を備えることを特徴とする運転支援装置である。
車両側方の映像を含む運転支援映像を前記表示手段に表示する縦列駐車モードと車両後方の映像を含む運転支援映像を前記表示手段に表示する通常駐車モードとを選択するモード選択手段と、
前記モード選択手段は、地図データにおける駐車場データに基づいて前記駐車モードのいずれかを選択する制御手段を備えることを特徴とする運転支援装置である。
また本発明(4)は、前記モード選択手段は、前記車両の現在位置が駐車場内の場合、通常駐車モードを選択することを特徴とする。
また本発明(5)は、前記モード選択手段は、前記車両に現在位置が駐車場内以外の場合、縦列駐車モードを選択することを特徴とする。
本発明(1)によれば、モード選択手段により縦列駐車モードが選択された場合、他の駐車モードとは異なるライン照射でカメラによる撮影を制御するので、通常駐車モードでは撮影することができない方向をカメラで撮影することができる。
また本発明(2)によれば、モード選択手段により縦列駐車モードが選択された場合、車両側方に対するライト照射でカメラによる撮影を制御するので、通常駐車モードでは撮影することができない側方をカメラで撮影することができる。
また本発明(3)によれば、モード選択手段が地図データにおける駐車場データに基づいて前記駐車モードのいずれかを選択するので、地図データにおける駐車場データに基づいて、縦列駐車モードと通常駐車モードとの切換を自動的に行うことができる。
また本発明(4)によれば、モード選択手段が、車両の現在位置が駐車場内の場合、通常駐車モードを選択するので、車両の現在位置が駐車場内の場合、自動的に通常駐車モードを選択することができる。
また本発明(5)によれば、モード選択手段が、車両に現在位置が駐車場内以外の場合、縦列駐車モードを選択するので、車両の現在位置が駐車場内以外の場合、自動的に縦列駐車モードを選択することができる。
図1および図2は、本発明の実施の第1形態としての車両の運転支援装置の概略的な構成を示す。以降に説明する実施形態で、先行する実施形態の構成と対応する部分には同一の参照符を付し、重複する説明を省略する。本実施形態の運転支援装置は、車両1が駐車場2に後進して駐車しようとする際に、白線3などで区画された駐車位置に正確に駐車することができるように、駐車アシストを行う。駐車アシストは、車両1の運転者に対し、表示手段である情報ディスプレイ4の表示画面に予測進路である進路予測曲線5aまたは車両1の両側を延長したガイドライン5bを表示して、駐車時の運転支援が行われる。進路予測曲線5aおよびガイドライン5bは、駐車アシスト用の電子制御ユニット(以下、「駐車アシストECU」と略称する)6がステアリング角の角度などの検出データに基づいて生成し、情報ディスプレイ4に表示する。運転者は、車両1の変速機のシフトレバー8を操作して進行方向を後進側に切換えると、駐車アシストECU6が進路予測曲線5aやガイドライン5bを画像として情報ディスプレイ4の表示画面上に表示する。スピーカ9からは、警告音や音声案内などが音響再生される。
情報ディスプレイ4には、駐車アシストECU6が生成する進路予測曲線5aやガイドライン5bとともに、車両1の車体後部に装着されているカメラユニット10が撮像する映像も表示される。カメラユニット10の視野10aから撮像する映像は、車両1の運転者に見えにくかったり、死角となる映像を明確に表示し、進路予測曲線5aやガイドライン5bとともに、駐車場2での運転操作に対して判りやすい支援を行うことができる。
駐車アシストECU6が生成する進路予測曲線5aは、ステアリング7への操向操作に応じて方向が変えられる。ステアリング7の操作は、ステアリング軸11の角変位量を角度検出センサ12によって検出して求める。通常の車両1では、ステアリング7を数回回転させることができる。このため、ステアリング角を検出するための角度検出センサ12は、ステアリング軸11の角変位量および角変位方向を検出し、センタ位置センサ13がステアリング軸11がセンタ位置にある状態を検出する。
ガイドライン5bは、車両1の車体の両側を後方に延長した仮想的な直線として、カメラユニット10が撮像する映像に重ねて表示される。ガイドライン5bの方向は、カメラユニット10の視野10aに対して固定される。車両1には、周囲の明るさを感知して照明系の点灯状態などを制御するコンライトセンサ14も設けられる。情報ディスプレイ4に表示される進路予測曲線5aやガイドライン5bは、コンライトセンサ14が感知する車両1の周囲の明るさに応じて、明るさや色合いを変化させ、判りやすい運転支援が行えるように調整される。
車両1には、ナビゲーション装置15やオーディオ装置16などの車載機器も搭載され、情報ディスプレイ4を利用して必要な情報の表示を行う。また、障害物センサとしてのバックソナー17やコーナセンサ18も車両1に搭載され、超音波などを利用して車両の死角に存在する障害物の検出を行う。
図3は、図1および図2の駐車アシストECU6の内部構成を示す。駐車アシストECU6内には、全体的な制御を行うデジタル信号プロセッサ(以下、「DSP」と略称する)20が含まれる。DSP20は、バス21を介し、制御や信号処理を行う。カメラユニット10が撮像する映像は、NTSC信号の形式で、アンプ+フィルタ回路22に入力され、アナログデジタル変換(以下、「ADC」と略称する)回路23で、アナログ信号からデジタル信号に変換され、フィールドバッファ24に記憶される。アンプ+フィルタ回路22からの映像出力は、同期分離回路25にも与えられ、水平同期や垂直同期用の同期信号が分離され、DSP20に入力される。
DSP20には、ステアリング軸11の角変位を検出する角度検出センサ12からの角度検出信号と、センタ位置センサ13からのセンタ位置検出信号も入力される。DSP20は、バス21に接続されるプログラムメモリ27およびデータメモリ28にそれぞれ記憶されているプログラムおよびデータに基づいて駐車アシスト動作を行う。保存メモリ29は、バッテリでバックアップされて駐車アシストECU6の電源35が投入されていないときでも、記憶内容を保存することができる。
DSP20は、入力される映像信号に基づき、白線3などの認識を行ったり、ステアリング軸の角変位操作に伴う進路予測曲線5aやガイドライン5bの生成を行う。生成された画像は、スイッチ(以下、「SW」と略称する)回路30によって出力が切換え可能なフィールドバッファ31,32に記憶される。SW回路30によって選択され、デジタルアナログ変換(以下、「DAC」と略称する)回路33からフィルタ+アンプ回路34を介して情報ディスプレイ4に映像出力として与えられる。駐車アシストECU6の全体に対しては、電源35から動作用の電力が供給され、リセット回路36によって電源投入時などにリセット信号が供給され、CLK+分周回路37に動作タイミングを合わせるためのクロック信号やそれを分周した信号が供給される。
図4は、本実施形態で、情報ディスプレイ4の表示画面上に表示される駐車支援のための画像情報の例を示す。図4(a)は、車両1が後進して駐車位置40に駐車しようとしている状態に対応する映像を示す。後方映像上には、車幅と平行に延長した線であるガイドライン5bが、ステアリング角に基づいて予測される進路予測曲線5aとともに表示される。なお、図4(b)に示すように、駐車位置40についての後方映像上には、進路予測曲線5aのみを追加して表示したり、図4(c)に示すように、後方映像のみを表示するように切換えることもできる。あるいは、図4(c)に示す後方映像に、ガイドライン5bのみを重ねて表示することもできる。
ガイドライン5bを表示することによって、駐車アシスト実行中の車両1の現在の車体の向きを知ることができる。また、駐車位置40の両側に白線3が駐車枠として引いてあれば、白線3とガイドライン5bとが平行になったところでステアリング7をセンタ位置に戻すことによって、車両1を駐車位置40のスペースと平行に駐車させる操作を容易に行うことができる。
図4に示すような、進路予測曲線5aやガイドライン5bの表示の切換えは、切換えスイッチを設け、運転者が好みに応じて表示モードを切換えるようにすることができる。また、一定の運転操作、たとえばステアリング7を操作するときのみ進路予測曲線5aが一定時間表示され、ブレーキを操作するときのみガイドライン5bが一定時間表示されたりするように、自動的な制御を行うこともできる。
また、進路予測曲線5aやガイドライン5bの明るさや配色は、コンライトセンサ14が感知する車両1の周囲の明るさに応じて変化させ、たとえば周囲が暗くなれば表示も暗くなるようにして、後方映像と進路予測曲線5aやガイドライン5bとが調和がとれた状態で表示されるように調整する。また、進路予測曲線5aやガイドライン5bの色も、周囲の明るさや色合いに応じて、運転者に判りやすくなるように変更する。たとえば、昼間は周囲が明るいので、黄色など目立つ色にし、夜間は周囲が暗くなるので、あまり目立つ色だと後方映像が見にくくなってしまうので暗くてかつ薄い色に変える。
進路予測曲線5aやガイドライン5bは明るさや色を変化させるための、周囲の明るさの入力のためにコンライトセンサ14を利用しているけれども、専用のセンサを設けて明るさを感知するようにすることもできる。また、カメラユニット10が撮像する絵から明るさを検出することもできる。カメラユニット10がカラーの映像を撮像するときには、映像から色も検出して、検出された色に合わせて進路予測曲線5aやガイドライン5bの色を変化させるようにすればよい。
図4に示すような駐車アシストの映像の切換えを運転者からのスイッチ操作に基づいて行う場合に、駐車アシスト動作の最初に切換える状態を、前回駐車アシスト動作を行わせたときの最終的な切換え状態を保存メモリ29に記憶しておいて、その記憶内容に従って設定する。これによって、1度運転者にとって見易い切換え状態が設定されれば、次回からの駐車アシストは、その見易い切換え状態で初めから行うことができる。
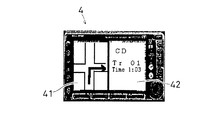
図5は、情報ディスプレイ4の表示画面で、図1のナビゲーション装置15によるナビゲーション画面41とオーディオ装置16に対するオーディオ画面42とを表示している状態を示す。運転者が必要なときに、駐車アシスト用の駐車位置40の後方映像か、ナビゲーション画面41あるいはオーディオ画面42かを選択可能とすることによって、情報ディスプレイ4を有効に利用して表示を行うことができる。
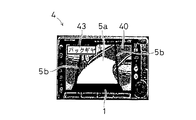
図6は、変速機のシフトレバー8の操作によるバックギアへの入力を運転者に情報ディスプレイ4を介して報知する状態を示す。駐車位置40を示す後方映像上に、バックギアに入力されていることを示す「バックギア」などのテロップ43が一定時間表示され、テロップ43の文字表示によってリバースに入っていることを運転者に判り易く知らせることができる。これによって、運転者がシフト位置を忘れて、前進状態と誤認し、急激な発進で事故を起こすような事態を防ぐことができる。テロップ43の表示に代えて、あるいはテロップ43の表示とともに、画面全体の表示色を変化させて、さらに運転者への注意を促すようにすることもできる。
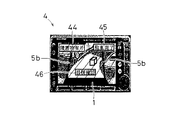
図7は、バックソナー17やコーナセンサ18によって障害物検知のテロップ44や駐車完了のテロップ45、さらには目視確認を促すテロップ46を表示している状態を示す。バックソナー17やコーナセンサ18が、車両1の近傍に障害物を検知すると、障害物ありを示す「障害物有り」や「STOP」などのテロップ43が一定時間表示され、運転者の注意を促す。バックソナー17やコーナセンサ18で検知される障害物は、駐車位置40の周辺の後方映像にも捕えられているはずであり、テロップ44に基づいて後方映像を注視すれば、障害物47を容易に視認することができる。なお、障害物47の検出時には、テロップ44の表示に代えて、あるいはテロップ44の表示とともに、画面全体の表示色を変化させて、運転者の注意の喚起を図ることもできる。
駐車完了を示すテロップ45は、車止めや壁をバックソナー17やコーナセンサ18などの障害物センサが検知して、予め設定される距離まで接近すれば、駐車完了のテロップ45を表示する。「駐車完了」や「STOP」などのテロップ45を表示することによって、運転者に駐車完了を知らせ、後進時の接触事故を防止することができる。なお、目視確認を促すテロップ46は、駐車アシストの実行時に、目視による安全確認を促すために表示する。テロップ46を表示することによって、情報ディスプレイ4のみを注視して、情報ディスプレイ4に映っていない車両1の前方や側方を含む周囲に対する注意力が足りなくなる事態を防ぐことができる。
また、後進して駐車するときの安全性を向上するために、たとえばバックギアに入力されると、車両1の走行速度が一定速度以上に出なくなるように速度制御を行うこともできる。また、速度制御は、バックソナー17などの障害物センサが、障害物47などを検出したときに行うこともできる。後進走行時、あるいは障害物検知時の後進速度を一定速度以上でないように制限することによって、後退時の衝突を防止したり、衝突するときの衝撃を緩和することができる。
図8は、本発明の実施の第2形態としての運転支援装置で、駐車アシストを行う概略的な構成を示す。本実施形態で、図1の実施形態に対応する部分には同一の参照符を付し、重複する説明を省略する。本実施形態のカメラユニット50はリモコン51による遠隔操作で、視野50aの方向を変化させることができる。カメラユニット50は、車両1の後部に装着され、カメラユニット50が撮像する視野50aを夜間などに照明するためのバックライト52も設けられる。バックライト52は、カメラユニット50へのリモコン51による遠隔操作に連動して、カメラユニット50の視野50aの方向に合わせて照明を行う。本実施形態では、情報ディスプレイ4を用いる映像による駐車アシストばかりではなく、スロットル制御53およびブレーキ制御54も駐車アシストECU56によって行い、円滑に駐車を行うことができるように支援する。情報ディスプレイ4には、進行予測曲線55aやガイドライン55bを用いての運転支援情報が表示される。
バックライト52は、車両1に装着されているバックライトを用いることもできるけれども、オプションとして、カメラユニット50に対応している専用品を後付けで装着することが好ましい。特に、照射方向を変化させる機構を設ける場合は、オプションの方が容易である。照射方向を変化させることができると、たとえば変速機のシフトレバー8を操作してバックギアに入れるときに、バックライト52の照射方向を下方に向けることによって、夜間などの暗い場合でも視認性を向上させることができる。
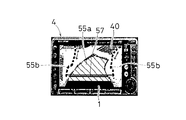
図9は、図8の実施形態で表示される運転支援用の画像の例を示す。本実施形態ではガイドライン55bを広角カメラの画像歪みに応じて湾曲させて表示している。カメラユニット50として使用するカメラは、できるだけ広い視野50aを確保するために広角のレンズを使用している。そのため、駐車位置40などの後方映像では、実際には直線の部分でも湾曲した映像として撮像される。したがって、ガイドライン55bも画像の歪みに応じて湾曲させる方が、より正確な運転支援を行うことができる。
また、広角のカメラユニット50の視野50aに、バンパなど、車両1の車体の一部が入っている場合、車体の方が近い位置にあるので、画像の歪みによって、両側のガイドライン55b間の間隔よりも、映像中の車体の幅の方が大きく見えてしまう。進行予測曲線55aについても、車体の幅に対応する幅で表示していれば、ガイドライン55bと同様に、車体の一部が見えるときに、その車体の近傍部分では、車体の幅の方が大きく見えてしまう。本実施形態では、進行予測曲線55aやガイドライン55bを、車両1の車幅に対応させて表示するときは、車両1の車体への近接部分でずれが生じる部分を非表示として、その部分での判断は運転者に任せることとする。
前述のような車体近傍でずれが生じる部分では、進行予測曲線55aやガイドライン55bの幅を広くして、車体の両側に連続的に連なるように表示させることもできる。進行予測曲線55aやガイドライン55bで幅が広く表示される部分は、実際の車幅よりも広くなる。したがって、幅が広く表示されている部分で、周囲の車両や障害物などの存在がなければ、より確実に安全性を確保することができる。
また、前述のように、ガイドライン55bは、駐車位置40に車両1が駐車するときに、他の駐車位置などに駐車している車両の側面や、駐車位置40に引かれている白線と平行になるようにすれば、ステアリングをセンタ位置にした状態で駐車位置40に車両1を駐車させることができる。
さらに、ガイドライン55bの幅を実際の車両1の車体の幅よりも大きくしておいて、駐車位置40での車両1の駐車の際の運転支援を、より判りやすく行うこともできる。たとえば、ガイドライン55bを実際の車幅よりも一定距離だけ広く表示し、ガイドライン55bが駐車位置40内の白線、隣接する駐車位置との境界線、あるいは隣接する駐車位置に既に駐車している車両の側面に重なるときにステアリングをセンタ位置に戻すようにすれば、ステアリングを直進状態にして駐車することができる。なお、ガイドライン55bを表示する幅は、運転者などのユーザが常用する駐車場などの実状に合わせて設定することが可能な構成とすることもできる。常用している駐車場であれば、ある一定の距離として、駐車位置40に適合した値を設定することができる。駐車場などが特定されないときは、ある一定の距離として、ドアの開閉や出入りなどに必要な最小限の値を設定し、駐車後に車両1から運転者などが外部に出ることができる余地を確保するようにしておく。
図9では、ガイドライン55bの車両1の近傍に、車両1の停止位置57を示す線を表示している。後方映像で、車両1の後端からある一定の距離の位置に線を表示し、駐車位置40の駐車枠の線などがその位置まで来れば停車するようにする。ある一定の距離として、車両1の後端のバンパなどが障害物や車止めなどに接触しない範囲で、できるだけ小さな値を設定し、狭い駐車スペースにも容易に駐車することができるようにしておくことが好ましい。
なお、ガイドライン55bの表示は、たとえば点線で行い、進行予測曲線55aよりも目立たなくして、進行予測曲線55aが結果的に強調され、より運転者に判りやすい運転案内を行うことができる。また、ガイドライン55bを表示する長さを、バックソナー17と連動して変化させることもできる。たとえば、バックソナー17が障害物47を検出しての警報の段階に応じて、ガイドライン55bを表示する長さを短くする。これによって、運転者は、移動距離の目安が得られるので、実際の運転感覚に近い状態の運転支援を受けることができる。
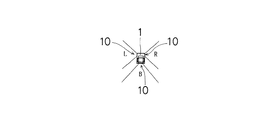
図10は、本発明の前提となる実施の第3形態としての車両の運転支援装置としての概略的な構成を示す。本実施形態では、切換スイッチ60を設けて、情報ディスプレイ4で縦列駐車支援61または通常駐車支援62を行う縦列駐車モードまたは通常駐車モードを切換可能にしている。通常駐車モードでは、カメラユニット50の視野50aやバックライト52の照射は車両1の後方を重点に行われる。縦列駐車モードでは、カメラユニット50の視野50aやバックライト52の照射を車両の側方に対しても行う。
なお、縦列駐車モードと通常駐車モードの切換は、自動的に行うこともできる。たとえば、ウインカランプ63またはハザードランプ64と、変速機をバックギアへ入れるシフトレバー8の操作とが同時になされることを縦列駐車とみなすことを条件に行うこともできる。また、ナビゲーション装置15によって、車両1の現在位置についての地図データを参照し、現在位置が駐車場内なら通常駐車モード、現在位置が路上なら縦列駐車モードに、それぞれ自動的に切換えることもできる。さらに、ステアリング7の切り角の変化によって、縦列駐車か否かを判断することもできる。たとえば、縦列駐車では、切り返しなどでステアリング操作を行って車両1の操向方向を変える頻度が高くなる。代表的なステアリング操作パターンを保存メモリ29などに記憶しておき、その操作が行われた際は、縦列駐車とみなし、縦列駐車モードに自動で切換えられるようにしておく。
図11は、本発明の前提となる実施の第4形態として、複数のカメラユニット10を車両1の車体の周囲に配置し、同一画面上に複数のカメラユニット10からの映像を同時に並べて表示する構成を示す。カメラユニット10は、車両1の前方左L、前方右Rおよび後方Bにそれぞれ配置され、それぞれの視野10a内の映像を撮像する。
図12は、図11の実施形態で、情報ディスプレイ4の表示画面上に、複数のカメラユニット10からの映像を、同時に標示する際の画面分割の例を示す。画面を分割して映像を表示することによって、全ての画面を1画面内で見ることができる。図12(1)では、時間的な分割によって、後方Bの映像のみを表示している状態を示す。他の映像は、一定時間毎に自動で切換えて表示される。画面の切換えは、運転者が手動で行うようにしてもよいけれども、自動で行うようにすれば、切換えの手間を省くことができる。
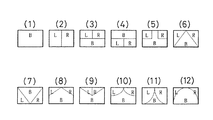
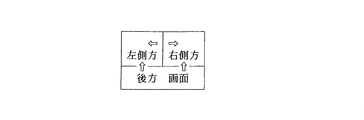
図12(2)では、画面を左右に2分割し、前方左Lおよび前方右Rの映像をそれぞれ表示している。図12(3)では、画面を上下に2分割し、上側はさらに左右に2分割して前方左Lおよび前方右Rを表示し、下側には後方Bの映像を表示している。図12(4)では、図12(3)の上下を入換えた状態の表示を行っている。図12(5)では、後方Bの映像を表示している画面の上部の左右に部分的に前方左Lおよび前方右Rの映像をそれぞれ表示している。
図12(6)では、矩形の画面の上辺中央と下辺の左右両端とを結ぶ直線をそれぞれ境界線として、上部の左右の部分に前方左Lおよび前方右Rの映像を表示し、下部中央の部分に後方Bの映像を表示している。図12(7)では、矩形の画面の下辺中央と上辺の左右両端とを結ぶ直線をそれぞれ境界線として、下部の左右の部分に前方左Lおよび前方右Rの映像を表示し、上部中央の部分に後方Bの映像を表示している。図12(8)では、図12(6)と同様の映像の配置で、境界線を上辺中央と左辺および右辺の中央付近との間を結ぶように引いて、後方Bの映像を表示する部分を相対的に大きくしている。図12(9)では、図12(7)と同様の映像の配置で、境界線を下辺中央と左辺および右辺の中央付近との間を結ぶように引いて、後方Bの映像を表示する部分を相対的に大きくしている。
図12(10)では、図12(8)と同様な映像の配置で、境界線を後方Bの映像を表示する部分に膨らんで張出す曲線形状にしている。図12(11)では、図12(6)と同様な映像の配置で、境界線を後方Bの映像を表示する部分に膨らんで張出す曲線形状にしている。図12(12)では、図12(6)と同様な映像の配置で、境界線を前方左Lおよび前方右Rの映像をそれぞれ表示する部分に膨らんで張出す曲線形状にしている。
図12に示すような画面分割は、他にも種々の形状で行うことができる。各表示パターンは、車両の走行状態に応じて自動的に切換えることが好ましい。たとえば、通常走行時は、図12(2)に示すような前方左Lおよび前方右Rの2画面、後進時は図12(3)〜(12)のいずれかに示すような前方左L、前方右Rおよび後方Bの3画面に、というように、状況に応じて自動的に表示パターンを変化させることによって、運転者に対して判りやすい表示を行うことができる。また、方向指示器の操作によるウインカランプ63の点灯や、ステアリング切り角の変化などに連動して、側方画面を前面表示画面または後方画面と組合わせて表示することもできる。
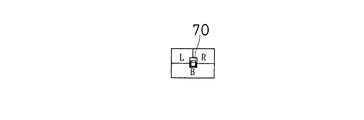
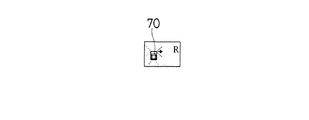
図13は、図12(3)に示す画面分割状態に、車両イラスト70を表示して、各カメラユニット10からの映像と車両1との位置関係を容易にしている状態を示す。車両イラスト70を併せて表示することによって、映像の方向を判りやすくすることができる。
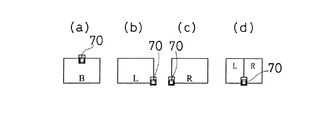
また、車両イラスト70の位置は、図14に示すように、画面分割の表示パターンを切換えると、連動して移動するようにすることが好ましい。たとえば、図12(1)に示すような時間的な画面分割では、図14(1)、図14(2)および図14(3)に示すように、後方B、前方左Lおよび前方右Rの映像に対応して、車両イラスト70の位置を画面の上部中央、右下および左下にそれぞれ移動させることによって、どの方向の映像であるかを判りやすく示すことができる。図12(2)の画面分割では、図14(4)に示すように、下部中央に車両イラスト70を移動させて、前方左Lおよび前方右Rの映像を表示していることを判りやすく示すことができる。
図15は、図12(1)に示すような表示画面で、車両イラスト70にカメラ映像の方向や範囲72を併せて表示している状態を示す。これによって、どのカメラユニット10による映像の表示かを判りやすく表示することができる。さらに、ステアリング7の切り角に応じて車両イラスト70の向きを変えるようにすれば、映像と進行方向との関係も判りやすく表示することができる。
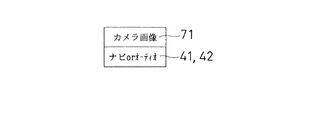
図16は、図12に示すような画面分割によるカメラ画像71の表示を、情報ディスプレイ4で、ナビゲーション装置15やオーディオ装置16からのナビゲーション画面41やオーディオ画面42との間でも行い、同時に表示している状態を簡略化して示す。情報ディスプレイ4の表示画面を有効に利用して、車両1の運転に必要な情報を、運転者などに効率的に提供することができる。
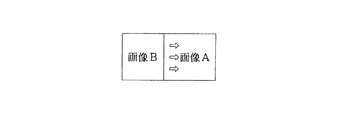
図17は、複数の表示画像の切換を、ワイプ方式で行う状態を示す。画像Aで画面全体を表示している状態で、たとえば画面の左方から次の画像Bの表示を開始する。画像Bと画像Aとの境界線は順次右方に移行し、移行が終了すると、画面全体で画像Bを表示する状態となる。画面全体が画像Aから画像Bに旬自適に切換えられると、変化に追従することが困難となるけれども、ワイプ方式で切換えれば、表示される映像の変化への追従を容易に行うことができる。また、図12(2)〜(12)に示すように、画面分割が行われているときでも、表示モードの切換えは、ワイプ方式で行うことができる。
図18は、画面分割状態での映像表示を、ステアリングの切り角に応じて分割表示面積や表示位置をワイプ方式で変化させる状態を示す。たとえば基本的には、図12(3)の分割状態とし、前進する場合は後方Bの表示面積を小さくし、左右に曲るときには、ステアリングの切り角に応じて曲る方向の表示面積を大きくする。後進するときには後方Bの表示面積を大きくする。これによって、進行方向の映像を強調して映し出すことができ、安全確認を支援することができる。
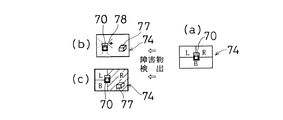
図19は、本発明の前提となる実施の第5形態としての運転支援装置の概略的な構成を示す。本実施形態では、情報ディスプレイ74の表示画面を、タッチパネル方式で入力も可能に構成し、多画面表示を行う。駐車アシストECU76は、バックソナー17やコーナセンサ18などの障害物センサで障害物47の有無を検出し、障害物47を検出すると画面表示で運転者などに知らせる。
図20は、本実施形態による情報ディスプレイ74の障害物表示画面の切換え状態を示す。図20(a)は、多画面表示による通常走行時あるいは駐車アシスト時の画面表示を行っている状態を示す。障害物が検出されると、図20(b)や図20(c)に示すような障害物表示画面に切換えられる。図20(b)に示す障害物表示画面では、障害物77の方向を車両イラスト70と矢印78とで表示する。障害物77の検出によって、障害物表示画面の色を変えて、運転者などの注意を促すこともできる。図20(c)に示す障害物表示画面では、障害物77を撮像しているカメラユニット10からの映像を表示する割合を大きくし、映像を見やすくすることができる。
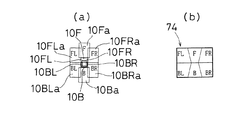
図21は、本発明の前提となる実施の第6形態として、複数のカメラユニット10を配置して、カメラユニット10が撮像する映像を、シームレスに合成して表示し、運転支援を行う構成を示す。図21(a)に示すように、たとえば車両1の後方の映像を撮像するために、3個のカメラユニット10L,10B,10Rを配置し、それぞれの視野10La,10Ba,10Raは部分的に重複するようにしておく。図21(b)は、図19に示すようなタッチパネル方式の情報ディスプレイ74の表示画面を示す。この表示画面では、3つのカメラユニット10L,10B,10Rで撮像した映像を、伸縮や切出し部分の調整で、継目無くつなげて、広範囲の連続した映像として表示する。
図22は、車両1の全周の映像を撮像して表示する状態を示す。図22(a)に示すように、6つのカメラユニット10F,10FL,10FR,10B,10BL,10BRをそれぞれ車両1の周囲に配置し、全周の映像を撮像する。図22(b)に示すように、それぞれのカメラユニット10F,10FL,10FR,10B,10BL,10BRからの映像を、情報ディスプレイ74の表示画面上に合成して表示すると、車両全周の安全確認が1画面で可能になる。また、バックソナー17やコーナセンサ18などと連携して、障害物を検知した方向に相当する画面に警告のテロップを表示したり、色を変化させたりすることもできる。
図21(b)や図22(b)に示す分割表示では、多くの映像が同時に表示されるので、1つあるいは複数の映像のみを選んで表示することもできる。選択は、運転者がスイッチなどを操作して行ったり、運転状況に応じて自動的に行ったりすればよい。また、画面をスクロールして広範囲を連続的に確認することができるような構成も可能である。本実施形態の情報ディスプレイ74は、タッチパネル方式の入力が可能であるので、図21(b)や図22(b)の表示状態から、見たい映像にタッチすることによって、映像を拡大すれば、ワンタッチで見たいポイントを詳しく確認することができる。なお、ワンタッチによって拡大した映像は、一定時間の経過で元に戻すことが好ましい。運転者などが手動で元に戻す操作を省くことができるからである。
図23は、本発明の前提となる実施の第7形態としての運転支援装置の概略的な構成を示す。本実施形態では、車両1の車体の前部に前方監視カメラ80を設置し、車体の最高部であるルーフにもルーフカメラ81を設置する。運転支援ECU84は、図3に示す駐車アシストECU6と基本的に同様な構成を有し、前方監視カメラ80が撮像する前方映像を利用して運転支援を行う。ナビゲーション装置85は、前方監視カメラ80によって撮像された前方の風景などの映像を取込むメモリを備え、交通渋滞の検出などに利用することができる。取込まれた映像は、ナビゲーション装置85によって、車両1が存在する位置の近傍に設置される交通管制センタなどに無線電波を介して伝達され、広域的な運転支援が行われる。前方監視カメラ80が撮像した映像は、情報ディスプレイ4にも表示され、前方の安全確認に利用することができる。
前方監視カメラ80は、前車検出用カメラとしても兼用することができる。車両1の進行方向の前方を走行している車両があると、追突防止のため、車間距離を確保する必要がある。前車検出用カメラとしての機能を前方監視カメラ80で兼用することによって、運転支援の機能と前車検出の機能とを低コストで備えることができる。また、前方監視カメラ80は、割込車監視カメラとしても兼用することができる。走行中の車両1の進行方向の前方に、割込車が進入すると、特に追突防止などの対応処置を執る必要がある。割込車監視カメラとしての機能を前方監視カメラ80で兼用することによって、運転支援の機能と割込車検出の機能とを低コストで備えることができる。
ルーフカメラ81は、車体で最も高い位置としての車両ルーフ上から前方を撮像する。車両1が高架下などを通行する際に、車高制限が設けられているときには、通行可否の確認を行う。通過しようとする上限部分の映像の見え方で、車高制限に該当するか否かを判断することができる。
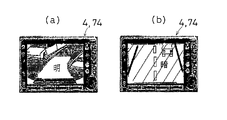
図24は、各実施形態で、情報ディスプレイ4,74へ表示する画像の明るさを、後進時と通常走行時とで変化させる状態を示す。図24(a)に示す後進時には、全体的に明るい画像を表示し、駐車位置40や進行予測曲線5a,55aなどが確認しやすいように表示する。図24(b)に示す通常走行時には、比較的暗く表示する。通常走行時は、運転者は直接前方を主として注視すべきであり、画面はあまり見ない方がよいので、比較的暗い状態にしておく。また、このようにしておけば、運転者の注意を喚起する必要があるときに、明るい色に変えることによって、容易に運転者の注意を引きつけることが可能になる。後進時は、詳細部分まで見やすくするために、画面を明るくする。
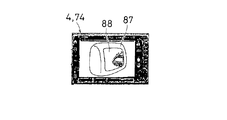
図25は、各実施形態で、後方映像を標示する際に、バックミラーの形状の表示枠87を用いて、後方映像であることを判り易くする状態を示す。表示枠87内に表示される後方映像も、画像処理によって切出しや伸縮の補正などを行い、バックミラーの画角に補正し、バックミラーに映る画像として運転者の感覚に合った表示に変化させる。特に、広角カメラを使用するときは、画像の歪みなどで距離感が掴みにくくなるので、補正を行うことが好ましい。
本発明は、以下の実施の形態が可能である。
(1)車両の進行方向の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の操向のためのステアリング角を検出するステアリング角検出手段と、
ステアリング角検出手段によって検出されるステアリング角に基づいて、車両の進路を予測する進路予測手段と、
進路予測手段によって予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを、運転支援情報として、表示手段に表示される車両の進行方向の映像上に表示する運転支援手段とを含むことを特徴とする車両の運転支援装置。
(1)車両の進行方向の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の操向のためのステアリング角を検出するステアリング角検出手段と、
ステアリング角検出手段によって検出されるステアリング角に基づいて、車両の進路を予測する進路予測手段と、
進路予測手段によって予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを、運転支援情報として、表示手段に表示される車両の進行方向の映像上に表示する運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される車両の進行方向の映像に、車両のステアリング角に基づいて予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを運転支援情報として表示するので、運転者の視覚に対する適切な運転支援を行うことができる。
車両の進行方向の映像を表示するとともに、ステアリング角に基づいて車両の進路を予測する予測進路や車体の幅方向の両側を進行方向に延長したガイドラインを表示して、運転支援を行うことができる。たとえば、車両が後進走行して駐車を行う際に、後方の映像上に車幅と平行に延長したガイドラインを重ねて表示するので、車両の現在の向きを解り易く示すことができる。また、駐車枠などが白線で引いてあるときには、その白線とガイドラインが平行になったところでステアリングをセンター位置に戻せば、容易に車両を駐車枠内に平行な姿勢で駐車させることができる。
(2)前記運転支援手段は、前記予測進路および/または前記ガイドラインの表示を、切換え可能であることを特徴とする車両の運転支援装置。
予測進路および/またはガイドラインの表示を切換え可能であるので、カメラの撮像した映像と予測進路またはガイドラインの一方、あるいは映像と予測進路およびガイドラインを表示して、適切な運転支援を行わせることができる。
予測進路やガイドラインなどの表示を切換え可能としておくことによって、運転者が一番使い易い表示状態で運転支援を行うことができる。
(3)前記運転支援手段は、周囲の明るさに応じて、前記予測進路および/またはガイドラインを表示する明るさを変えることを特徴とする車両の運転支援装置。
予測進路やガイドラインを表示する明るさを周囲の明るさに応じて、運転者に判りやすくなるように切換えることができる。
周囲の明るさに応じて予測進路やガイドラインを表示する明るさを変えるので、周囲の明るさに応じて、運転者に見易い表示状態で運転支援を行うことができる。
(4)前記運転支援手段は、周囲の配色に応じて、前記予測進路および/またはガイドラインを表示する配色を変えることを特徴とする車両の運転支援装置。
予測進路の表示の際の配色を、車両の周囲の明るさや色合いなどの配色に応じて変化させるので、運転者にとって判りやすく表示して適切な運転支援を行わせることができる。
周囲の配色に応じて予測進路やガイドラインを表示する配色を変えるので、周囲の明るさや色合いに応じて、運転者に解り易くなるような表示の配色に切換え、有効な運転支援を行うことができる。
(5)前記車両は、周囲の明るさを感知して、照明系の切換えを行うための明るさ感知器を備え、
前記運転支援手段は、明るさ感知器によって感知される周囲の明るさに応じて、前記予測進路および/またはガイドラインの明るさまたは配色を変えることを特徴とする車両の運転支援装置。
前記運転支援手段は、明るさ感知器によって感知される周囲の明るさに応じて、前記予測進路および/またはガイドラインの明るさまたは配色を変えることを特徴とする車両の運転支援装置。
車両に備えられる明るさ感知器によって、周囲の明るさを感知し、予測進路やガイドラインの明るさまたは配色を変えるので、運転者にとって判りやすい表示を自動的に行うことができる。
周囲の明るさを感知して照明系の切換えを行うためのコーンライトセンサなどの明るさ感知を備えて、明るさ感知器によって感知される周囲の明るさに応じて予測進路やガイドラインの明るさまたは配色を変えるので、周囲の明るさや色合いに応じて、運転者にとって解り易い運転支援が行えるように表示手段の表示を自動的に切換えることができる。
(6)前記運転支援手段は、前記カメラが撮像する映像の背景色に合わせて、前記予測進路および/またはガイドラインの配色を変えることを特徴とする車両の運転支援装置。
カメラによって撮像される映像の背景色に合わせて、予測進路やガイドラインの配色を変えるので、たとえば背景色が明るい場合は暗い色で、背景色が暗い場合は明るい色で予測進路やガイドラインを表示し、運転者にとって判りやすい運転支援を行うことができる。
カメラが撮像する映像の背景色に合わせて予測進路やガイドラインの配色を変えるので、たとえば背景色が明るい場合は暗い色で、背景色が暗い場合は明るい色で表示することによって、運転者にとって見易い運転支援を行うことができる。
(7)前記運転支援手段は、
車両の運転が駐車のための運転か否かを判断する駐車運転判断手段と、
駐車運転判断手段によって駐車運転と判断されるとき、駐車運転が終了したか否かを判断する駐車終了判断手段と、
駐車終了判断手段によって駐車運転が終了したと判断される時点で、前記予測進路および/またはガイドラインの表示のための切換え状態を記憶する記憶手段と、
駐車運転判断手段によって駐車運転と判断されるとき、前記運転支援情報の表示状態を、記憶手段の記憶内容に従って切換える切換手段とを含むことを特徴とする車両の運転支援装置。
車両の運転が駐車のための運転か否かを判断する駐車運転判断手段と、
駐車運転判断手段によって駐車運転と判断されるとき、駐車運転が終了したか否かを判断する駐車終了判断手段と、
駐車終了判断手段によって駐車運転が終了したと判断される時点で、前記予測進路および/またはガイドラインの表示のための切換え状態を記憶する記憶手段と、
駐車運転判断手段によって駐車運転と判断されるとき、前記運転支援情報の表示状態を、記憶手段の記憶内容に従って切換える切換手段とを含むことを特徴とする車両の運転支援装置。
車両の駐車運転の支援を終了する際の最終の表示状態を記憶して、次に駐車運転の支援を行う際に記憶された表示状態に切換えて表示を行うので、運転者が表示状態を切換えることなく、運転者にとって判りやすい表示状態で駐車運転の支援を行うことができる。
駐車運転の支援を行っているときの最終的な表示の切換え状態を記憶しておいて、次に駐車運転の案内を行うときの表示状態の切換えに利用するので、運転者が毎回切換え状態を設定しなくても、駐車運転の案内に適した切換え状態で運転支援を行わせることができる。
(8)前記運転支援手段は、
前記予測進路および/または前記ガイドラインの表示を切換える切換手段と、
車両の運転が駐車のための運転か否かを判断する駐車運転判断手段と、
前記切換手段によって、前記予測進路および/またはガイドラインの表示が切換えられると、該切換え状態を記憶する記憶手段とを含み、
運転支援手段は、駐車運転判断手段によって駐車運転と判断されるとき、前記運転支援情報の表示状態を、記憶手段の記憶内容に従って表示することを特徴とする車両の運転支援装置。
前記予測進路および/または前記ガイドラインの表示を切換える切換手段と、
車両の運転が駐車のための運転か否かを判断する駐車運転判断手段と、
前記切換手段によって、前記予測進路および/またはガイドラインの表示が切換えられると、該切換え状態を記憶する記憶手段とを含み、
運転支援手段は、駐車運転判断手段によって駐車運転と判断されるとき、前記運転支援情報の表示状態を、記憶手段の記憶内容に従って表示することを特徴とする車両の運転支援装置。
表示が切換えられた際の切換え状態を記憶して、次に駐車運転の支援を行う際に記憶された切換え状態に切換えて表示を行うので、運転者が表示状態を切換えることなく、運転者にとって判りやすい表示状態で駐車運転の支援を行うことができる。
駐車運転の支援を行っているときに切換えられた表示の切換え状態を記憶しておいて、次に駐車運転の案内を行うときの表示状態の切換えに利用するので、運転者が毎回切換え状態を設定しなくても、駐車運転の案内に適した切換え状態で運転支援を行わせることができる。
(9)車両の後方の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の変速機が後進状態に切換えられているか否かを検出する後進状態検出手段と、
後進状態検出手段によって変速機が後進状態に切換えられていると判断されるとき、表示手段の表示状態を変化させ、変速機が後進状態である旨を運転者に知らせることによって、運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の変速機が後進状態に切換えられているか否かを検出する後進状態検出手段と、
後進状態検出手段によって変速機が後進状態に切換えられていると判断されるとき、表示手段の表示状態を変化させ、変速機が後進状態である旨を運転者に知らせることによって、運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
変速機がバックギアに切換えられて後進状態になると、表示手段の表示状態が変化するので、車両が後進状態となっていることを運転者に通知し、変速機のシフト位置を忘れることによる事故の防止を図ることができる。
車両の後方の映像を撮像して、有効な運転支援を行うことができる。特に変速機が後進状態に切換えられると映像を表示する表示手段の表示状態を変化させて変速機が後進状態である旨を運転者に知らせるようにすれば、変速機がバックギアに切換えられて後進することを運転者に解り易く知らせることができ、車両が走行する方向が後方であることを間違えないようにすることができる。
(10)車両の後方の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の後方で障害物の有無を検知する障害物センサと、
障害物センサによって障害物が検出されるとき、表示手段の表示状態を変化させて障害物の存在を運転者に知らせることによって、運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の後方で障害物の有無を検知する障害物センサと、
障害物センサによって障害物が検出されるとき、表示手段の表示状態を変化させて障害物の存在を運転者に知らせることによって、運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
バックソナーやコーナセンサなどの障害物センサによって障害物が検出されるときに、表示手段の表示状態を変化させて障害物の存在を運転者に知らせるので、運転者に注意を促して障害物の接触事故の防止を図ることができる。
バックソナーやコーナセンサなどの障害物センサで車両の後方の障害物の有無を検知し、障害物が検知されると後方の映像を表示する表示手段の表示状態を変化させるので、障害物の検知を運転者に対して解り易く表示し、接触事故などの防止を図ることができる。
(11)前記運転支援手段は、前記運転支援のために、文字のテロップによって情報を表示することを特徴とする車両の運転支援装置。
表示画面への文字のテロップによって運転支援のための情報を表示するので、特に危険を防止するための注意を確実に喚起することができる。
変速機が後進状態である旨や、障害物の検知を文字によるテロップで表示するので、表示の内容を確実に運転者に伝えることができる。
(12)前記運転支援手段は、前記運転支援のために、画面全体の表示色の変化によって情報を表示することを特徴とする車両の運転支援装置。
画面全体の色の変化で運転者の注意を喚起することができる。
変速機が後進状態である旨や障害物の検知を、表示画面全体の表示色の変化によって表示するので、運転者に対して確実に注意を促すことができる。
変速機が後進状態である旨や障害物の検知を、表示画面全体の表示色の変化によって表示するので、運転者に対して確実に注意を促すことができる。
(13)車両の駐車運転を支援する映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の運転状態を検出して、駐車運転状態となっているか否かを判断し、駐車運転状態と判断されるとき、表示手段の映像表示とともに、駐車運転支援のための画像表示を行う運転支援手段と、
運転支援手段による駐車運転支援のための画像表示に、目視による安全確認を促すテロップを表示させる安全確認手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の運転状態を検出して、駐車運転状態となっているか否かを判断し、駐車運転状態と判断されるとき、表示手段の映像表示とともに、駐車運転支援のための画像表示を行う運転支援手段と、
運転支援手段による駐車運転支援のための画像表示に、目視による安全確認を促すテロップを表示させる安全確認手段とを含むことを特徴とする車両の運転支援装置。
車両の運転状態が駐車運転状態となっていると判断されるときに、駐車運転支援のための画像表示とともに目視による安全確認を促すテロップを表示させるので、運転者が表示手段の画面のみを注視するのを防ぐことができる。
カメラが撮像する映像によって駐車運転の支援を行う表示画面上に目視による安全確認を促すテロップを表示させるので、表示画面上に写っていない車両の前方や側方などへの目視も忘れないように運転者の注意を喚起することができる。
(14)車両の後方の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の後方で障害物の有無を検知する障害物センサと、
車両の運転状態を検出して、車両が後進して駐車運転を行っているか否かを判断し、駐車運転を行っていると判断されるとき、駐車のための運転支援の情報を表示手段に表示する運転支援手段と、
障害物センサの検知結果に基づいて駐車完了か否かを判断し、駐車完了と判断されるとき表示手段に駐車完了を示す情報を表示させる安全確認手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の後方で障害物の有無を検知する障害物センサと、
車両の運転状態を検出して、車両が後進して駐車運転を行っているか否かを判断し、駐車運転を行っていると判断されるとき、駐車のための運転支援の情報を表示手段に表示する運転支援手段と、
障害物センサの検知結果に基づいて駐車完了か否かを判断し、駐車完了と判断されるとき表示手段に駐車完了を示す情報を表示させる安全確認手段とを含むことを特徴とする車両の運転支援装置。
バックソナーなどの障害物センサの検知結果に基づいて、駐車運転完了を判断し、運転者に駐車完了を示す情報を表示して知らせることができる。
車両が後進状態で駐車運転を行っているときに、バックソナーなどの障害物センサと連動して駐車完了を知らせることができるので、運転者は障害物センサの検知結果を表示手段で容易に確認することができる。
(15)車両の後方の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の変速機が後進状態に切換えられているか否かを検出する後進状態検出手段と、
後進状態検出手段によって変速機が後進状態に切換えられていると判断されるとき、車両の走行速度を予め定める上限速度以下に制限して運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の変速機が後進状態に切換えられているか否かを検出する後進状態検出手段と、
後進状態検出手段によって変速機が後進状態に切換えられていると判断されるとき、車両の走行速度を予め定める上限速度以下に制限して運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
車両が後進状態になると、上限速度以下に速度が制限されるので、後退時の衝突を防止したり、衝突時の衝撃を低減して緩和することができる。
車両が後進状態のときには、走行速度を予め定める上限速度以下に制限するので、後進状態での衝突を防止したり、衝突したときの衝撃を緩和することができる。
(16)車両の後方の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の後方で障害物の有無を検知する障害物センサと、
障害物センサによって障害物が検知されるとき、車両の走行速度を予め定める上限速度以下に制限して運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の後方で障害物の有無を検知する障害物センサと、
障害物センサによって障害物が検知されるとき、車両の走行速度を予め定める上限速度以下に制限して運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
バックソナーなどの障害物センサによって障害物が検出されると、車両の走行速度を上限速度以下に制限するので、障害物との衝突を防止したり、衝突時の衝撃を緩和したりすることができる。
バックソナーなどの障害物センサで障害物を検知すると、車両の走行速度が予め定める上限速度以下に制限されるので、障害物との衝突の防止や衝突の際の衝撃の緩和を図ることができる。
(17)車両の後方の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の変速機が後進状態に切換えられているか否かを検出する後進状態検出手段と、
後進状態検出手段によって変速機が後進状態に切換えられていると判断されるとき、車両の後方を照明するランプの照射方向を変化させて運転の支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の変速機が後進状態に切換えられているか否かを検出する後進状態検出手段と、
後進状態検出手段によって変速機が後進状態に切換えられていると判断されるとき、車両の後方を照明するランプの照射方向を変化させて運転の支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
車両が後進するとき車両の後方を照明するランプの照射方向を変化させて運転の支援を行うので、夜間などの暗い場合でもカメラが撮像する映像を明るくして、判りやすい運転の支援を行わせることができる。
車両が後進状態であると判断されるときには、車両の後方を照明するランプの照射方向を変化させるので、カメラによって撮像する映像の明るさを明るくして、夜間などの暗い場合でも視認性を向上させることができる。
(18)前記ランプは、オプションとして取付けられることを特徴とする車両の運転支援装置。
車両が後進状態でカメラの視野を照明するランプをオプションで取付けるので、夜間などの視認性の向上を有効に図ることができる。
ランプはオプションとして取付けられるので、カメラの撮像範囲に合わせて適切な照明を行うことができる。
(19)車両には、ナビゲーション装置および/またはオーディオ装置を含む車載機器が搭載され、
前記表示手段に、前記カメラからの映像および前記運転支援手段からの画像と、車載機器からの画像とを切換えて表示させる切換え手段を備えることを特徴とする車両の運転支援装置。
前記表示手段に、前記カメラからの映像および前記運転支援手段からの画像と、車載機器からの画像とを切換えて表示させる切換え手段を備えることを特徴とする車両の運転支援装置。
車両に搭載されるナビゲーション装置やオーディオ装置などの車載機器と表示手段の表示を切換えて運転の必要に応じて表示を行わせることができる。
運転支援を行うカメラからの映像および運転支援手段からの画像と、ナビゲーション装置やオーディオ装置を含む車載機器からの画像とを切換えて表示することができるので、運転者の必要に応じて運転支援と車載機器の利用とを切換えて行うことができる。
(20)車両の進行方向の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
表示手段に表示される映像上に、車両の駐車のための運転支援情報を、通常駐車モードまたは縦列駐車モードを切換えて表示可能な運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
表示手段に表示される映像上に、車両の駐車のための運転支援情報を、通常駐車モードまたは縦列駐車モードを切換えて表示可能な運転支援手段とを含むことを特徴とする車両の運転支援装置。
通常の駐車であるか縦列駐車であるかに従って、車両の駐車のための運転支援情報を、通常駐車モードまたは縦列駐車モードに切換えて表示可能であるので、モードに応じた適切な画面で運転の支援を行うことができる。
車両の進行方向をカメラで撮像し、駐車運転を行う際に有効な運転支援を行うことができる。特に通常駐車モードまたは縦列駐車モードを切換えて運転支援を行うので、それぞれの駐車モードに適合した運転支援を有効に行わせることができる。
(21)前記運転支援手段は、ウインカランプまたはハザードランプと、変速機の後進状態への切換えとが同時に行われるときに、前記縦列駐車モードに切換えることを特徴とする車両の運転支援装置。
ウインカランプまたはハザードランプと、変速機のシフト状態とに基づいて、縦列駐車モードに自動的に切換えることができる。
縦列駐車モードへの切換えは、ウインカランプまたはハザードランプと変速機の後進状態への切換えとが同時に行われることによって自動的に行われるので、運転者が駐車モードの切換えを行うことなく、適切な運転支援を行わせることができる。
(22)車両にはナビゲーション装置が搭載され、
前記運転支援手段は、ナビゲーション装置から得られる車両の現在位置に基づいて、車両の駐車する位置が駐車場内であるか路上であるかを判断し、駐車場内であるときには前記通常駐車モードに、路上であるときには前記縦列駐車モードに切換えることを特徴とする車両の運転支援装置。
前記運転支援手段は、ナビゲーション装置から得られる車両の現在位置に基づいて、車両の駐車する位置が駐車場内であるか路上であるかを判断し、駐車場内であるときには前記通常駐車モードに、路上であるときには前記縦列駐車モードに切換えることを特徴とする車両の運転支援装置。
ナビゲーション装置から得られる車両の現在位置に基づいて、車両が駐車する位置が駐車場内であるか路上であるかを判断して、駐車場内なら通常の駐車モードに、路上なら縦列駐車モードに自動的に切換えることができる。
ナビゲーション装置から得られる車両の現在位置に基づき、車両が駐車場内で存在していれば通常の駐車モード、路上に存在していれば縦列駐車モードに自動的に切換えて適切な駐車支援を行うことができる。
(23)前記運転支援手段は、車両の操向のためのステアリング角の切り角の変化に従って、前記通常駐車モードまたは前記縦列駐車モードを切換えることを特徴とする車両の運転支援装置。
ステアリングの切り角の変化に従って、通常駐車モードと縦列駐車モードとを切換えるので、切換えしなどを含む縦列駐車と含まない通常駐車モードとを自動的に切換えることができる。
車両の操向のためのステアリング角の切り角の変化で、通常駐車モードか縦列駐車モードかの切換えを行うので、縦列駐車時に行われる切換えしなどの特有のステアリング操作で自動的に縦列駐車モードに切換えることができる。
(24)車両の周囲の映像を撮像するように、撮像範囲をずらせて配置される複数のカメラと、
カメラによって撮像される映像を表示する表示手段と、
表示手段の表示画面をカメラの配置に従って分割し、複数のカメラからの映像を同時に表示して運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
表示手段の表示画面をカメラの配置に従って分割し、複数のカメラからの映像を同時に表示して運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
複数のカメラの撮像範囲をずらせて配置して、車両の周囲の映像を撮像し、表示手段をカメラの配置に従って分割して複数のカメラからの映像を同時に表示するので、一画面内で複数の映像を見ることができ、運転者は広い範囲の映像を確認しながら運転を行うことができる。
車両の周囲の映像を撮像するように撮像範囲をずらせて配置される複数のカメラからの映像で、有効な運転支援を行うことができる。表示手段の表示画面をカメラの配置に従って分割して、複数のカメラからの映像を同時に表示することによって、広い範囲の映像を同時に確認することが可能となり、有効な運転支援を行うことができる。
(25)車両の運転状況を検出する運転状況検出手段をさらに含み、
前記運転支援手段は、運転状況検出手段によって検出される運転状況に応じて、表示画面を切換えることを特徴とする車両の運転支援装置。
前記運転支援手段は、運転状況検出手段によって検出される運転状況に応じて、表示画面を切換えることを特徴とする車両の運転支援装置。
車両の運転状況に応じて表示画面に表示する映像を切換えるので、たとえば通常走行時の前方左と前方右との2画面、後進時は前方左と前方右および後方の3画面のように、状況に応じて自動的に表示手段の映像の表示状態を変化させ、運転者に判りやすい映像情報の表示による支援を行うことができる。
車両の運転状況を検出し、検出される運転状況に応じて表示画面の切換えを行うので、たとえば通常走行時は前方左右の2画面を表示し、後進走行時は前方左右および後方の3画面を表示するように、自動的に表示画面の分割状態を切換えて、運転者に解り易く映像を表示することができる。
(26)前記運転支援手段は、前記表示手段で、前記複数のカメラからの映像の表示を行う際の画像上に、車両を簡略化して表示することを特徴とする車両の運転支援装置。
表示手段の表示画面上に車両を簡略化して表示するので、車両の表示と映像の表示とに基づいて、車両に対する映像の関係を判りやすく表示して、運転者に対する適切な運転の支援を行うことができる。
複数のカメラからの映像を表示する画像上に、車両を簡略化して表示するので、複数のカメラからの映像と、車両との関係を解り易く表示することができる。
(27)前記運転支援手段は、前記車両の表示位置を、カメラからの映像に合わせて移動させることを特徴とする車両の運転支援装置。
車両の表示位置をカメラからの映像に合わせて移動させるので、映像の切換えを判りやすく表示することができる。
車両を簡略化して表示する位置を、カメラからの映像に合わせて移動させるので、画面上に表示されている映像が車両に対してどの方向に向いているカメラによって撮像される映像であるかが解り易い表示を行うことができる。
(28)前記運転支援手段は、前記車両を簡略化して表示する際に、カメラの撮像の方向および範囲を表示することを特徴とする車両の運転支援装置。
表示手段に車両を簡略化して表示するとともに、カメラの撮像の方向および範囲を表示するので、表示されている映像がどのカメラによって撮像されているかを判りやすく認識させることができる。
車両を簡略化して表示する際に、カメラの撮像の方向および範囲を表示するので、表示されている映像が車両に対してどの方向を向いているカメラからの映像であるかを解り易く表示することができる。
(29)車両には、ナビゲーション装置および/またはオーディオ装置を含む車載機器が搭載され、
前記運転支援手段は、前記表示手段の表示画面を分割して前記複数のカメラからの映像と、車載機器からの画像とを表示することを特徴とする車両の運転支援装置。
前記運転支援手段は、前記表示手段の表示画面を分割して前記複数のカメラからの映像と、車載機器からの画像とを表示することを特徴とする車両の運転支援装置。
各カメラからの映像とナビゲーション装置やオーディオ装置からの画像とを、一画面内で見ることができる。
複数のカメラからの映像と、ナビゲーション装置やオーディオ装置などの車載機器からの画像とを、表示画面を分割して表示するので、運転支援用の映像と車載機器からの画像とを同一画面上で同時に見ることができる。
(30)前記運転支援手段は、前記表示手段に映像を表示するカメラを、予め定める時間毎に切換えることを特徴とする車両の運転支援装置。
複数のカメラからの映像を予め定める時間毎に切換えて、運転者が手動で切換える手間を省くことができる。
複数のカメラからの映像を予め定める時間毎に切換えて表示するので、運転者が手動に切換える手間を省くことができる。
(31)前記運転支援手段は、前記映像の切換えを、ワイプで行うことを特徴とする車両の運転支援装置。
複数のカメラの映像をワイプで切換えるので、映像間の移行が連続的に行われ、かつ運転者が手動で切換えることなく映像の切換えを自動で行うことができる。
複数のカメラからの映像の切換えを、ワイプで徐々に行うので、映像が急に切換えられることを避けることができる。
(32)前記カメラは、車両の側方の映像を撮像するカメラを含み、
前記運転支援手段は、方向指示器への操作に連動して、操作された方向指示器に関連する側方の映像を、前記表示手段に表示することを特徴とする車両の運転支援装置。
前記運転支援手段は、方向指示器への操作に連動して、操作された方向指示器に関連する側方の映像を、前記表示手段に表示することを特徴とする車両の運転支援装置。
方向操作に連動して進行方向の映像を自動で映し出すことができ、安全確認を有効に支援することができる。
方向指示器への操作に連動して側方の映像を表示するので、進行方向の映像も自動的に表示して、安全確認を支援することができる。
(33)前記運転支援手段は、車両の操向を行うステアリングの切り角に応じて前記映像の切換えを行うことを特徴とする車両の運転支援装置。
ステアリング切り角に応じて映像の切換えを行うので、車両が進行する方向の映像を自動的に表示して、安全かつ有効に支援することができる。
車両の操向を行うステアリングの切り角に応じて映像の切換えを行うので、実際の車両の進行方向の映像を自動的に表示して、安全確認を支援することができる。
(34)前記運転支援手段は、前記ステアリングの切り角に応じて画面の分割状態を変更することを特徴とする車両の運転支援装置。
ステアリングの切り角に応じて画面の分割状態を変更するので、進行方向の映像を広い画面で表示し、安全確認を容易に行わせるように支援することができる。
ステアリングの切り角に応じて画面の分割状態を変更するので、車両の進行方向の映像を大きく表示することもできる。
(35)車両の周囲で障害物の有無を検知する障害物の有無を検知する障害物センサを備え、
前記運転支援手段は、障害物センサによって障害物が検知されるとき、検知の方向を前記表示手段に表示することを特徴とする車両の運転支援装置。
前記運転支援手段は、障害物センサによって障害物が検知されるとき、検知の方向を前記表示手段に表示することを特徴とする車両の運転支援装置。
コーナセンサなどの障害物センサが障害物を検知すると、検知の方向が表示されるので、画面上の車両と障害物との関係を運転者に知らせて、注意を喚起することができる。
コーナセンサなどの障害物センサと連動して、障害物が検知されると検知方向が表示手段に表示されるので、運転者に対する注意を喚起することができる。
(36)前記運転支援手段は、前記障害物センサが障害物を検知するとき、該障害物センサの検知方向を撮像するカメラからの映像を表示するように切換えることを特徴とする車両の運転支援装置。
コーナセンサなどの障害物センサが障害物を検知すると、障害物の含まれる映像が表示されて、障害物の存在や状態に対する運転者の注意の喚起を行うことができる。
障害物が検知された方向の映像を表示するので、画面で確認することができる。
障害物が検知された方向の映像を表示するので、画面で確認することができる。
(37)前記運転支援手段は、前記障害物センサが障害物を検知するとき、該障害物センサの検知方向を撮像するカメラからの映像の表示位置を画面の中央寄りに変え、該画面を拡大することを特徴とする車両の運転支援装置。
コーナセンサなどの障害物センサと連動して、障害物が含まれる映像の位置を画面の中央寄りにしたり拡大したりして、運転者に対する障害物の存在や状態の表示を判りやすく行うことができる。
障害物が検知されると、検知方向を撮像するカメラからの映像の表示位置を中央寄りに変えて、画面を拡大するので、障害物の存在や状態に対する運転者への注意の喚起を確実に行うことができる。
(38)前記運転支援手段は、前記障害物センサの検知方向に、警告を表示することを特徴とする車両の運転支援装置。
コーナセンサなどの障害物センサと連係して、障害物の検知方向に警告を表示するので、運転者に対し障害物が含まれる方向を判りやすく知らせることができる。
障害物の検知方向には警告が表示されるので、運転者の注意を喚起することができる。
障害物の検知方向には警告が表示されるので、運転者の注意を喚起することができる。
(39)前記運転支援手段は、隣接するカメラからの映像を前記表示手段に同時に表示するときに、映像間で連続的につながるように、各映像の表示範囲および表示位置を調整することを特徴とする車両の運転支援装置。
隣接するカメラの撮像する映像を連続させて、1枚の映像のように表示し、広い範囲にわたって判りやすい映像を運転者に提供して運転の支援を行うことができる。
隣接するカメラからの映像を表示手段に同時に表示するときに、連続した1つの映像として表示することができるので、運転者にとって解り易い状態で広い範囲の映像を表示して有効な運転支援を行うことができる。
(40)前記カメラは、車両の前方、前方左、前方右、後方、後方左および後方右を撮像するように配置されることを特徴とする車両の運転支援装置。
車両の全周の映像を撮像することができる。
カメラを車両の前方、前方左、前方右、後方、後方左および後方右を撮像するように配置するので、車両の全周にわたって安全確認を行うことができる。
カメラを車両の前方、前方左、前方右、後方、後方左および後方右を撮像するように配置するので、車両の全周にわたって安全確認を行うことができる。
(41)前記運転支援手段は、前記表示手段の表示画面を上下に分割し、上方の画面中央に前方の映像、上方の画面の左右に前方左および前方右の映像をそれぞれ表示し、下方の画面中央に後方の映像、下方の画面の左右に後方左および後方右の映像をそれぞれ表示することを特徴とする車両の運転支援装置。
車両の全周の安全確認を表示画面の一画面で確実に行うことができる。
車両の全周にわたる映像を、カメラの配置に合わせて有効に行うことができる。
車両の全周にわたる映像を、カメラの配置に合わせて有効に行うことができる。
(42)前記運転支援手段は、前記配置に基づいて撮像される映像から選択される映像を、前記表示画面に表示することを特徴とする車両の運転支援装置。
車両の全周を撮像可能に配置される複数のカメラから必要に応じて選択されるカメラの映像のみを表示して、表示手段を有効に使用して必要な映像の表示を行わせることができる。
カメラの全周に向けて配置されるカメラから、必要な映像を選択して詳しく表示させることができる。
(43)前記運転支援手段は、撮像範囲が隣接するカメラからの映像を連続してずらせてスクロールされながら、前記表示手段で表示することを特徴とする車両の運転支援装置。
撮像する範囲が隣接するカメラからの映像を連続してスクロールさせ、全体として1つの映像として表示することができるので、運転者は広い範囲にわたって周囲の映像を容易に確認することができる。
撮像範囲が隣接するカメラからの映像を連続してずらせながらスクロールして、広範囲の映像を自然な状態で確認することができる。
(44)前記表示手段はタッチパネルを備え、
前記運転支援手段は、タッチパネルへの入力に従って、映像の表示状態を変化させることを特徴とする車両の運転支援装置。
前記運転支援手段は、タッチパネルへの入力に従って、映像の表示状態を変化させることを特徴とする車両の運転支援装置。
複数のカメラが撮像する映像を表示する表示手段にはタッチパネルが備えられるので、映像の表示状態の変化のための操作を、運転者はタッチパネルに触れるだけで行うことができる。
タッチパネルを使用してワンタッチで運転者が見たい映像の表示状態を変更させることができる。
(45)前記運転支援手段は、前記タッチパネルへの入力に従って、入力された位置の映像を予め定める時間拡大して表示し、該時間経過後に元に戻すことを特徴とする車両の運転支援装置。
運転者がタッチパネルに触れて映像を拡大して表示させても、予め定める時間経過後には元に戻るので、運転者の手動による操作を減らして有効な運転支援を行うことができる。
ワンタッチで見たい映像を一定時間拡大して表示させることができる。
ワンタッチで見たい映像を一定時間拡大して表示させることができる。
(46)車両の前方の映像を撮像するカメラと、
カメラによって撮像される映像を取込んで記憶する記憶手段と、
記憶手段に記憶された映像に基づいて、車両の運転支援のための情報を取得する運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を取込んで記憶する記憶手段と、
記憶手段に記憶された映像に基づいて、車両の運転支援のための情報を取得する運転支援手段とを含むことを特徴とする車両の運転支援装置。
車両の前方の映像をカメラによって撮像すると、記憶手段に取込まれ、車両の運転支援のための情報として取得されるので、運転者を支援する有効な情報を容易に抽出することができる。また、外部に情報として伝達し、たとえば渋滞情報などとして、広域的に活用することもできる。
車両の前方の映像を撮像するカメラを用いて、有効な運転支援を行うことができる。特に、前方の映像を記憶手段に取込み、運転支援のための情報を取得することによって、カメラの映像をその車両ばかりではなく、渋滞情報として、その車両の周辺の交通の状況を把握するために有効に利用することができる。
(47)前記カメラからの映像を表示する表示手段を備えることを特徴とする車両の運転支援装置。
カメラが撮像する前方の映像を表示手段に表示するので、運転者は表示手段で前方を確認することもできる。
カメラが撮像する前方の映像を表示手段に表示するので、前方の確認用としても利用することができ、カメラを兼用して個別にカメラを設ける場合に比較して低コスト化を図ることができる。
(48)前記カメラからの映像を画像処理して、割込み車両を検出する割込み車検出手段を備えることを特徴とする車両の運転支援装置。
カメラが撮像する前方の映像の画像処理によって、割込み車両を検出するので、前方割込み車に対する車間距離の確保などの運転支援を、有効に行うことができる。
前方を撮像するカメラからの映像を画像処理して割込み車両を検出するので、カメラは割込み検出用としても利用することができ、割込みに対する安全運転の確保を図ることができる。
(49)車両の最高部に設置され、該最高部の高さから車両の周囲の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
カメラによって撮像される映像に基づいて車高制限の検出を行い、検出結果を運転支援のための情報として運転車に知らせる運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
カメラによって撮像される映像に基づいて車高制限の検出を行い、検出結果を運転支援のための情報として運転車に知らせる運転支援手段とを含むことを特徴とする車両の運転支援装置。
車両の最高部にカメラを設置して車両の周囲の映像を撮像し、表示手段に撮像される映像を表示し、映像に基づいて車高制限の検出を行うので、高架下などの通行の可否の確認を容易に行うことができる。
カメラを利用して車高制限の検出を行い、高架下などの通行可否の確認を容易に行うことができる。
(50)車両の前方および後方の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の走行状態を検出する走行状態検出手段と、
走行状態検出手段によって検出される走行状態に従って、通常走行時には前方の映像を表示手段に表示し、後進走行時には後方の映像を該前方の映像よりも明るく表示して運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の走行状態を検出する走行状態検出手段と、
走行状態検出手段によって検出される走行状態に従って、通常走行時には前方の映像を表示手段に表示し、後進走行時には後方の映像を該前方の映像よりも明るく表示して運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
車両が通常走行を行うときには表示手段に前方の映像を表示し、後進走行時には後方の映像を前方の映像よりも明るく表示して運転支援を行うので、後進走行時には詳細部分まで容易に見分けることができて、有効な運転支援を行うことができる。
車両の走行方向に応じて、前進時よりも後進時に画面を明るくして、詳細部分まで見易くすることができる。
(51)車両の前方および後方の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の走行状態を検出する走行状態検出手段と、
走行状態検出手段によって検出される走行状態に従って、通常走行時には前方の映像を表示手段に表示し、後進走行時には後方の映像を、表示枠をバックミラーの画像に変えて表示して、運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の走行状態を検出する走行状態検出手段と、
走行状態検出手段によって検出される走行状態に従って、通常走行時には前方の映像を表示手段に表示し、後進走行時には後方の映像を、表示枠をバックミラーの画像に変えて表示して、運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
後進走行時の後方の映像の表示を、表示枠をバックミラーの画像に変えて行うので、運転者が見慣れた表示状態で後方の映像を表示し、後方の映像であることが容易に判るように運転支援を行うことができる。
車両の後方を撮像するカメラからの映像の表示を、バックミラーに合わせて行うことができ、運転者にとって見慣れた形で後方の映像を表示して、有効な運転支援を行うことができる。
(52)前記運転支援手段は、前記バックミラーの表示枠を用いて表示する後方の映像を、バックミラーの画角に補正して表示することを特徴とする車両の運転支援装置。
カメラが広角の撮像範囲を有していると、画像の歪みで距離感がつかみにくくなるので、画像の切出しや伸縮の補正などを行って、通常のバックミラーの画角に合わせて運転者の感覚に合うような表示を行うことができる。
車両の後方を撮像した映像の表示の際に、バックミラーの画角に合わせて補正するので、運転者は見慣れたバックミラーと同様の感覚で後方の映像を確認し、有効な運転支援を行うことができる。
(53)車両の後方の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の後方で障害物の有無を検知する障害物センサと、
障害物センサによって障害物が検出されるとき、表示手段の表示状態を変化させて障害物の方向を運転者に知らせることによって、運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の後方で障害物の有無を検知する障害物センサと、
障害物センサによって障害物が検出されるとき、表示手段の表示状態を変化させて障害物の方向を運転者に知らせることによって、運転支援を行う運転支援手段とを含むことを特徴とする車両の運転支援装置。
バックソナーやコーナセンサなどの障害物センサによって障害物が検出されるときに、表示手段の表示状態を変化させて障害物の方向を運転者に知らせるので、運転者に注意を促して障害物の接触事故の防止を図ることができる。
バックソナーやコーナセンサなどの障害物センサで車両の後方の障害物の有無を検知し、障害物が検知されると後方の映像に該障害物の方向を表示させるので、障害物の検知を運転者に対して解り易く表示し、接触事故などの防止を図ることができる。
(54)カメラによって撮像される車両の進行方向の映像を表示する表示手段と、
車両の操向のためのステアリング角に基づいて、車両の進路を予測する進路予測手段と、
進路予測手段によって予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを、運転支援情報として、表示手段に表示される車両の進行方向の映像上に表示する運転支援手段とを含むことを特徴とする車両の運転支援装置。
車両の操向のためのステアリング角に基づいて、車両の進路を予測する進路予測手段と、
進路予測手段によって予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを、運転支援情報として、表示手段に表示される車両の進行方向の映像上に表示する運転支援手段とを含むことを特徴とする車両の運転支援装置。
車両の進行方向の映像に、車両のステアリング角に基づいて予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを運転支援情報として表示するので、運転者の視覚に対する適切な運転支援を行うことができる。
車両の進行方向の映像を表示するとともに、ステアリング角に基づいて車両の進路を予測する予測進路や車体の幅方向の両側を進行方向に延長したガイドラインを表示して、運転支援を行うことができる。たとえば、車両が後進走行して駐車を行う際に、後方の映像上に車幅と平行に延長したガイドラインを重ねて表示するので、車両の現在の向きを解り易く示すことができる。また、駐車枠などが白線で引いてあるときには、その白線とガイドラインが平行になったところでステアリングをセンター位置に戻せば、容易に車両を駐車枠内に平行な姿勢で駐車させることができる。
(55)車両の進行方向の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の操向のためのステアリング角を検出するステアリング角検出手段と、
ステアリング角検出手段によって検出されるステアリング角に基づいて、車両の進路を予測する進路予測手段と、
進路予測手段によって予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを、運転支援情報として、表示手段に表示される車両の進行方向の映像上に表示する運転支援手段とを含み、
前記運転支援手段は、
車両の運転が駐車のための運転か否かを判断する駐車運転判断手段と、
駐車運転判断手段によって駐車運転と判断されるとき、駐車運転が終了したか否かを判断する駐車終了判断手段と、
駐車終了判断手段によって駐車運転が終了したと判断されたとき、前記予測進路および/またはガイドラインの表示状態を記憶する記憶手段と、
駐車運転判断手段によって駐車運転と判断されたとき、前記運転支援手段による運転支援情報の表示状態を、記憶手段の記憶された表示状態に切換える切換手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の操向のためのステアリング角を検出するステアリング角検出手段と、
ステアリング角検出手段によって検出されるステアリング角に基づいて、車両の進路を予測する進路予測手段と、
進路予測手段によって予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを、運転支援情報として、表示手段に表示される車両の進行方向の映像上に表示する運転支援手段とを含み、
前記運転支援手段は、
車両の運転が駐車のための運転か否かを判断する駐車運転判断手段と、
駐車運転判断手段によって駐車運転と判断されるとき、駐車運転が終了したか否かを判断する駐車終了判断手段と、
駐車終了判断手段によって駐車運転が終了したと判断されたとき、前記予測進路および/またはガイドラインの表示状態を記憶する記憶手段と、
駐車運転判断手段によって駐車運転と判断されたとき、前記運転支援手段による運転支援情報の表示状態を、記憶手段の記憶された表示状態に切換える切換手段とを含むことを特徴とする車両の運転支援装置。
カメラによって撮像される車両の進行方向の映像に、車両のステアリング角に基づいて予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを運転支援情報として表示するので、運転者の視覚に対する適切な運転支援を行うことができる。
また、車両の駐車運転の支援を終了する際の最終の表示状態を記憶して、次に駐車運転の支援を行う際に記憶された表示状態に切換えて表示を行うので、運転者が表示状態を切換えることなく、運転者にとって判りやすい表示状態で駐車運転の支援を行うことができる。
(56)車両の進行方向の映像を撮像するカメラと、
カメラによって撮像される映像を表示する表示手段と、
車両の操向のためのステアリング角を検出するステアリング角検出手段と、
ステアリング角検出手段によって検出されるステアリング角に基づいて、車両の進路を予測する進路予測手段と、
進路予測手段によって予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを、運転支援情報として、表示手段に表示される車両の進行方向の映像上に表示する運転支援手段とを含み、
前記運転支援手段は、
前記予測進路および/または前記ガイドラインの表示を切換える切換手段と、
車両の運転が駐車のための運転か否かを判断する駐車運転判断手段と、
前記切換手段によって、前記予測進路および/またはガイドラインの表示が切換えられると、該切換え状態を記憶する記憶手段とを含み、
前記運転支援手段は、駐車運転判断手段によって駐車運転と判断されるとき、前記運転支援情報の表示状態を、記憶手段の記憶内容に従って表示することを特徴とする車両の運転支援装置。
カメラによって撮像される映像を表示する表示手段と、
車両の操向のためのステアリング角を検出するステアリング角検出手段と、
ステアリング角検出手段によって検出されるステアリング角に基づいて、車両の進路を予測する進路予測手段と、
進路予測手段によって予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを、運転支援情報として、表示手段に表示される車両の進行方向の映像上に表示する運転支援手段とを含み、
前記運転支援手段は、
前記予測進路および/または前記ガイドラインの表示を切換える切換手段と、
車両の運転が駐車のための運転か否かを判断する駐車運転判断手段と、
前記切換手段によって、前記予測進路および/またはガイドラインの表示が切換えられると、該切換え状態を記憶する記憶手段とを含み、
前記運転支援手段は、駐車運転判断手段によって駐車運転と判断されるとき、前記運転支援情報の表示状態を、記憶手段の記憶内容に従って表示することを特徴とする車両の運転支援装置。
カメラによって撮像される車両の進行方向の映像に、車両のステアリング角に基づいて予測される車両の予測進路、および車体の幅方向の両側を進行方向に延長したガイドラインを運転支援情報として表示するので、運転者の視覚に対する適切な運転支援を行うことができる。
また、表示が切換えられた際の切換え状態を記憶して、次に駐車運転の支援を行う際に記憶された切換え状態に切換えて表示を行うので、運転者が表示状態を切換えることなく、運転者にとって判りやすい表示状態で駐車運転の支援を行うことができる。
(57)前記カメラは広角の視野で映像を撮像し、
前記運転支援手段は、前記ガイドラインを、カメラが撮像する広角の映像の歪みに合わせて湾曲させて表示することを特徴とする車両の運転支援装置。
前記運転支援手段は、前記ガイドラインを、カメラが撮像する広角の映像の歪みに合わせて湾曲させて表示することを特徴とする車両の運転支援装置。
ガイドラインの表示を広角のカメラの映像の歪みに合わせて湾曲させるので、背幅の延長線を正確に表示して運転の支援を行うことができる。
(58)前記運転支援手段は、前記予測進路および/またはガイドラインの表示の際に、車両近傍の部分は表示しないことを特徴とする車両の運転支援装置。
予測進路やガイドラインの表示の際に、車両近傍では手前側に車体が存在するので、見掛け上、幅が車両の背幅に合わなくなってしまう。車両近傍の背幅に合わない部分は表示しないようにするので、運転者の判断に委ねて、不自然な表示を避けることができる。
(59)前記運転支援手段は、前記予測進路および/またはガイドラインの表示の際に、車両近傍の部分は表示幅を広げて表示することを特徴とする車両の運転支援装置。
予測進路やガイドラインの幅を車両近傍で広げて表示することによって、安全を確保することができる。
(60)前記運転支援手段は、前記予測進路および/またはガイドラインの車両近傍に車両の停止位置を示す線を表示することを特徴とする車両の運転支援装置。
予測進路やガイドラインの車両近傍に車両の停止位置を表す線を表示するので、駐車枠の線がその位置まで来れば停車するように運転すれば、判りやすい駐車運転の支援を行うことができる。
(61)前記運転支援手段は、ブレーキ操作が行われるときに、前記ガイドラインの表示を行うことを特徴とする車両の運転支援装置。
ブレーキを操作したときにガイドラインの表示を行うので、運転者はブレーキを操作して予測進路がガイドラインと平行か否かを確認し、平行なときにはステアリングがセンサ位置であることを確認することができる。
(62)前記運転支援手段は、前記ガイドラインを点線で表示すること行うことを特徴とする車両の運転支援装置。
ガイドラインを点線で表示するので、ガイドラインを目立たなくすることができ、予測進路も合わせて表示するときには、予測進路が強調され、運転者が予測進路が判りやすい状態で運転の支援を行うことができる。
(63)車両の進路での障害物の有無を検知する障害物センサを備え、
前記運転支援手段は、障害物センサによって検知される障害物までの距離に連動して、前記ガイドラインの長さを変更することを特徴とする車両の運転支援装置。
前記運転支援手段は、障害物センサによって検知される障害物までの距離に連動して、前記ガイドラインの長さを変更することを特徴とする車両の運転支援装置。
バックソナーなどの障害物センサと連動して、ガイドラインの長さを変更するので、実際の運転感覚に近い表示を行い、運転者にとって判りやすく運転の支援を行うことができる。
(64)前記運転支援手段は、前記ガイドラインを表示する際の幅を、前記車両の幅より大きく表示することを特徴とする車両の運転支援装置。
ガイドラインを表示する際の幅を、車両の幅よりも大きく表示するので、たとえばガイドラインの一方が幅方向の駐車枠の一方と重なるときにステアリングを先端位置に戻すような運転操作を行いやすいように運転者に対する支援を行うことができる。
1 車両
4,74 情報ディスプレイ
5a,55a 進行予測曲線
5b,55b ガイドライン
6,56,66 駐車アシストCPU
7 ステアリング
8 シフトレバー
10,10B,10L,10R,10F,10FL,10FR,10BL,10BR,50 カメラユニット
10a,10Ba,10La,10Ra,10Fa,10FLa,10FRa,10BLa,10BRa,50a 視野
12 角度検出センサ
13 センタ位置センサ
14 コンライトセンサ
15,85 ナビゲーション装置
16 オーディオ装置
17 バックソナー
18 コーナセンサ
20 DSP
27 プログラムメモリ
29 保存メモリ
40 駐車位置
41 ナビゲーション画面
42 オーディオ画面
43,44,45,46 テロップ
47,77 障害物
52 バックライト
63 ウインカランプ
64 ハザードランプ
70 車両イラスト
71 カメラ画像
80 前方監視カメラ
81 ルーフカメラ
86 運転支援ECU
87 表示枠
88 補正画像
4,74 情報ディスプレイ
5a,55a 進行予測曲線
5b,55b ガイドライン
6,56,66 駐車アシストCPU
7 ステアリング
8 シフトレバー
10,10B,10L,10R,10F,10FL,10FR,10BL,10BR,50 カメラユニット
10a,10Ba,10La,10Ra,10Fa,10FLa,10FRa,10BLa,10BRa,50a 視野
12 角度検出センサ
13 センタ位置センサ
14 コンライトセンサ
15,85 ナビゲーション装置
16 オーディオ装置
17 バックソナー
18 コーナセンサ
20 DSP
27 プログラムメモリ
29 保存メモリ
40 駐車位置
41 ナビゲーション画面
42 オーディオ画面
43,44,45,46 テロップ
47,77 障害物
52 バックライト
63 ウインカランプ
64 ハザードランプ
70 車両イラスト
71 カメラ画像
80 前方監視カメラ
81 ルーフカメラ
86 運転支援ECU
87 表示枠
88 補正画像
Claims (5)
- 車両に設置されたカメラで撮影された映像を表示手段に表示する運転支援装置であって、
車両側方の映像を含む運転支援映像を前記表示手段に表示する縦列駐車モードと車両後方の映像を含む運転支援映像を前記表示手段に表示する通常駐車モードとを選択するモード選択手段と、
前記モード選択手段により縦列駐車モードが選択された場合、前記他の駐車モードとは異なるライン照射で前記カメラによる撮影を制御する制御手段とを有することを特徴とする運転支援装置。 - 前記制御手段は、前記モード選択手段により縦列駐車モードが選択された場合、前記車両側方に対するライト照射で前記カメラによる撮影を制御することを特徴とする請求項1記載の運転支援装置。
- 車両に設置されたカメラで撮影された映像を表示手段に表示する運転支援装置であって、
車両側方の映像を含む運転支援映像を前記表示手段に表示する縦列駐車モードと車両後方の映像を含む運転支援映像を前記表示手段に表示する通常駐車モードとを選択するモード選択手段と、
前記モード選択手段は、地図データにおける駐車場データに基づいて前記駐車モードのいずれかを選択する制御手段を備えることを特徴とする運転支援装置。 - 前記モード選択手段は、前記車両の現在位置が駐車場内の場合、通常駐車モードを選択することを特徴とする請求項3記載の運転支援装置。
- 前記モード選択手段は、前記車両に現在位置が駐車場内以外の場合、縦列駐車モードを選択することを特徴とする請求項3記載の運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009296401A JP2010143577A (ja) | 2009-12-25 | 2009-12-25 | 運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009296401A JP2010143577A (ja) | 2009-12-25 | 2009-12-25 | 運転支援装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009113059A Division JP4927904B2 (ja) | 2009-05-07 | 2009-05-07 | 車両の運転支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010143577A true JP2010143577A (ja) | 2010-07-01 |
Family
ID=42564425
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009296401A Pending JP2010143577A (ja) | 2009-12-25 | 2009-12-25 | 運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010143577A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0365219A (ja) * | 1989-08-04 | 1991-03-20 | Asahi Glass Co Ltd | 三フッ化窒素含有ガスの除害方法 |
| JP2015166228A (ja) * | 2014-03-04 | 2015-09-24 | 株式会社デンソー | 撮影画像処理装置 |
| JP2021065115A (ja) * | 2019-10-18 | 2021-04-30 | ヤンマーパワーテクノロジー株式会社 | 障害物検知システム |
| JP2022096227A (ja) * | 2020-12-17 | 2022-06-29 | 株式会社奥村組 | 掘削物の破砕装置 |
| CN115131989A (zh) * | 2021-03-26 | 2022-09-30 | 丰田自动车株式会社 | 驾驶辅助方法、驾驶辅助装置、驾驶辅助系统及记录介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05143895A (ja) * | 1991-11-25 | 1993-06-11 | Toyota Motor Corp | 自動駐車装置 |
| JPH10264841A (ja) * | 1997-03-25 | 1998-10-06 | Nissan Motor Co Ltd | 駐車誘導装置 |
| JPH11157404A (ja) * | 1997-11-26 | 1999-06-15 | Toyota Motor Corp | 駐車支援装置 |
-
2009
- 2009-12-25 JP JP2009296401A patent/JP2010143577A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05143895A (ja) * | 1991-11-25 | 1993-06-11 | Toyota Motor Corp | 自動駐車装置 |
| JPH10264841A (ja) * | 1997-03-25 | 1998-10-06 | Nissan Motor Co Ltd | 駐車誘導装置 |
| JPH11157404A (ja) * | 1997-11-26 | 1999-06-15 | Toyota Motor Corp | 駐車支援装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0365219A (ja) * | 1989-08-04 | 1991-03-20 | Asahi Glass Co Ltd | 三フッ化窒素含有ガスの除害方法 |
| JP2015166228A (ja) * | 2014-03-04 | 2015-09-24 | 株式会社デンソー | 撮影画像処理装置 |
| JP2021065115A (ja) * | 2019-10-18 | 2021-04-30 | ヤンマーパワーテクノロジー株式会社 | 障害物検知システム |
| JP7657542B2 (ja) | 2019-10-18 | 2025-04-07 | ヤンマーパワーテクノロジー株式会社 | 障害物検知システム |
| JP2022096227A (ja) * | 2020-12-17 | 2022-06-29 | 株式会社奥村組 | 掘削物の破砕装置 |
| CN115131989A (zh) * | 2021-03-26 | 2022-09-30 | 丰田自动车株式会社 | 驾驶辅助方法、驾驶辅助装置、驾驶辅助系统及记录介质 |
| CN115131989B (zh) * | 2021-03-26 | 2024-04-09 | 丰田自动车株式会社 | 驾驶辅助方法、驾驶辅助装置、驾驶辅助系统及记录介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4723703B2 (ja) | 車両の運転支援装置 | |
| EP1870870B1 (en) | Vehicle drive assist system | |
| JP2010064750A (ja) | 運転支援装置 | |
| JP2001006097A5 (ja) | ||
| US8218007B2 (en) | Camera system for a vehicle and method for controlling a camera system | |
| US20170028921A1 (en) | On-vehicle image display device, on-vehicle image display method for vehicle, and on-vehicle image setting device | |
| JP2005110202A (ja) | カメラ装置及び車両周辺監視装置 | |
| JP2010130646A (ja) | 車両周辺確認装置 | |
| JP4927933B2 (ja) | 運転支援装置 | |
| JP4861449B2 (ja) | 車両の運転支援装置 | |
| JP2010143577A (ja) | 運転支援装置 | |
| JP2010076765A (ja) | 走行記録装置 | |
| JP4927904B2 (ja) | 車両の運転支援装置 | |
| JP2007221200A (ja) | 車両周辺監視装置 | |
| JP4825298B2 (ja) | 運転支援装置 | |
| JP3739269B2 (ja) | 車両運転支援装置 | |
| JP4880742B2 (ja) | 運転支援装置 | |
| JP5270527B2 (ja) | 運転支援装置 | |
| JP5016021B2 (ja) | 運転支援装置 | |
| JP2010137857A (ja) | 運転支援装置 | |
| JP2004051063A (ja) | 車両周辺視認装置 | |
| JP4972149B2 (ja) | 運転支援装置 | |
| JP5202510B2 (ja) | 運転支援装置 | |
| JP5209596B2 (ja) | 運転支援装置 | |
| JP2008068827A (ja) | 後側方確認装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110906 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111017 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20111206 |